基于5G网络的图迈®手术机器人远程动物实验研究
2025-02-14 00:00:00马世勋狐鸣马云涛景武堂田宏伟龚世怡杨佳杨婧蔡辉
机器人外科学 2025年1期
摘要 目的:探索在不同距离5G网络环境下国产图迈®手术机器人在远程动物手术中的可行性、安全性及稳定性。方法:将6头实验用标准猪随机分为6组,使用国产图迈®手术机器人在5G网络环境下从甘肃省6个地区分别对位于甘肃省人民医院动物手术室的6头实验猪实施远程胆囊切除手术。对实验过程中的网络速率、网络延迟、调试时间、装机时间、手术时间、失血量、不良事件和术中并发症进行记录。结果:本次实验历时15 d完成,累计往返距离超过3000 km,最远的手术直线距离约为780 km,6台远程动物胆囊切除手术均在5G网络环境下顺利完成。平均网络延迟为(55.16±25.33) ms,平均调试时间为(65.17±13.75) min,平均装机时间为(5.12±1.60) min,平均机器人操控时间为(22.00±5.40) min,平均总手术时间为(44.00±4.23) min,平均失血量为(5.83±7.36) mL,术中发生弱网不良事件1次,无术中并发症发生。结论:5G网络环境下使用国产图迈®手术机器人可以安全、稳定地进行远程动物手术,这为实现远程机器人临床手术奠定了理论基础。
关键词 5G网络;机器人辅助手术;图迈®手术机器人;动物实验;胆囊切除术
中图分类号 R608 R656 文献标识码 A 文章编号 2096-7721(2025)01-0012-07
Remote animal experiments with Toumai® surgical robot based on 5G network
MA Shixun1, 2, 3, HU Ming1, 2, 3, MA Yuntao1, 2, JING Wutang1, 2, TIAN Hongwei1, 2, GONG Shiyi1, 2, YANG Jia1, 2, YANG Jing1, 2, CAI Hui1, 2, 3
(1.Department of General Surgery, Gansu Provincial Hospital, Lanzhou 730000, China; 2. Clinical Center of General Surgery, Gansu Provincial Hospital, Lanzhou 730000, China; 3. Key Laboratory of Molecular Diagnostics and Precision Medicine for Surgical Oncology in Gansu Province, Lanzhou 730000, China)
Abstract Objective: To explore the feasibility, safety and stability of the domestic Toumai® surgical robot in remote animal experiments under different distances of 5G network environment. Methods: 6 standard pigs were randomly divided into 6 groups, and the Toumai® surgical robot was used to perform remote cholecystectomy on experimental pigs located in the animal operating room of Gansu Provincial Hospital from 6 different locations in Gansu Province under 5G network environment. The network rate, network delay, debugging time, loading time, operative time, blood loss, adverse events and intraoperative complications were recorded. Results: The experiment lasted 15 days, with a cumulative round-trip distance of gt;3000 km, and the farthest surgical distance was about 780 km. 6 remote animal cholecystectomies were successfully completed under 5G network environment, with the average network delay of (55.16±25.33) ms, the average commissioning time of (65.17±13.75) min, the average loading time of (5.12±1.60) min, the average robot manipulating time of (22.00±5.40) min, the average total operative time of (44.00±4.23) min, and the average blood loss of (5.83±7.36) mL. 1 case of intraoperative weak network connection was found, but there was no intraoperative complications occurred. Conclusion: Remote animal surgery can be safely and stably performed using domestic Toumai® surgical robot under 5G network environment, which provides a theoretical foundation for the remote robot-assisted surgery on human.
Key words 5G Network; Robot-assisted Surgery; Toumai® Surgical Robot; Animal Experiment; Cholecystectomy
远程医疗包含了使用信息技术提供远程医疗服务的多种模式[1],远程手术是其中最高端和最有前景的一种。5G网络通信技术和手术机器人设备的发展推动了远程手术的进步,远程手术需求明显上升,特别是COVID-19爆发以来,远程医疗显得尤为重要[2-3]。通过远程手术平台可以向医疗条件相对欠缺和技术相对不发达的地区提供高质量的医疗服务,减轻患者就医难度和经济负担,促进医务人员技术交流,降低病毒传播风险。
远程手术最先被报道于2001年,Marescaux J
教授使用ZEUS机器人手术系统通过海底光缆进行了第一例人类远程胆囊切除术,被认为是远程手术的里程碑[4-5],但网络延迟和高昂的传输成本等问题导致远程手术的发展一直停滞不前。随着网络通信技术的不断进步,5G网络技术克服了这一困难,也为远程手术的推广带来了新的机遇。2020年3月,我国工业和信息化部印发了《关于推动5G加快发展的通知》,提出开展5G智慧医疗系统建设,搭建5G智慧医疗示范网和医疗平台,加快新兴的5G移动通信技术在医疗领域的应用推广,进一步推动“5G+医疗健康”的创新发展[6]。目前,全球已经研发了多种机器人手术系统,包括美国的Da Vinci机器人手术系统[7]、意大利的ALF-X机器人手术系统[8]、韩国的K-FLEX及Revo-i机器人手术系统和中国的Micro Hand S及图迈®机器人手术系统[9-12],
但只有Da Vinci机器人手术系统的远程手术能够成熟地应用于临床。
图迈®机器人手术系统是我国自主研发的可以实现远程手术的机器人系统。除了具有四代Da Vinci机器人手术系统的特点外,还具有操作灵敏、视野真实、重量轻、使用和维护成本低、设备兼容性强等一系列优势。2022年1月,本院参与完成图迈®手术机器人国家级Ⅱ期临床实验,目前Ⅲ期临床实验正在进行。在前期研究的基础上,本研究采用图迈®机器人手术系统和5G通信技术相结合的方式,探索不同距离实施远程动物手术的可行性、安全性及稳定性。
1 材料与方法
1.1实验动物与麻醉 实验选用6头3月龄的雌性标准实验猪,体重30~40 kg。预先在兰州市动物研究所饲养7 d,术前禁食24 h,禁水4 h。
所有实验猪均于术前30 min静脉注射丙泊酚
[5~8 mg/(kg·bw)]行麻醉诱导,待完成气管插管后行机械通气,采用间歇正压通气(Intermittent Positive Pressure Ventilation,IPPV)。开放双侧耳缘静脉通道给予补液,以2%~4%七氟烷吸入麻醉复合间断静脉注射丙泊酚、舒芬太尼、苯磺酸顺式阿曲库铵等维持麻醉。术中常规监测心电图、有创动脉血压、脉搏氧饱和度等。本研究获得了甘肃省人民医院伦理委员会的批准(IACUC编号2015-0358)。实验操作流程按照《美国公共卫生署人道管理和使用实验动物政策》中规定的原则进行[13]。
1.2仪器、设备与试剂 本研究采用图迈®机器人手术系统、5G网络连接和网络安全系统、运输台车和术中辅助设备(如无菌手术室、手术器械、无菌敷料、缝线、麻醉机、输液器等)。试剂包括麻醉药品、消毒药品、术中补液用生理盐水等。
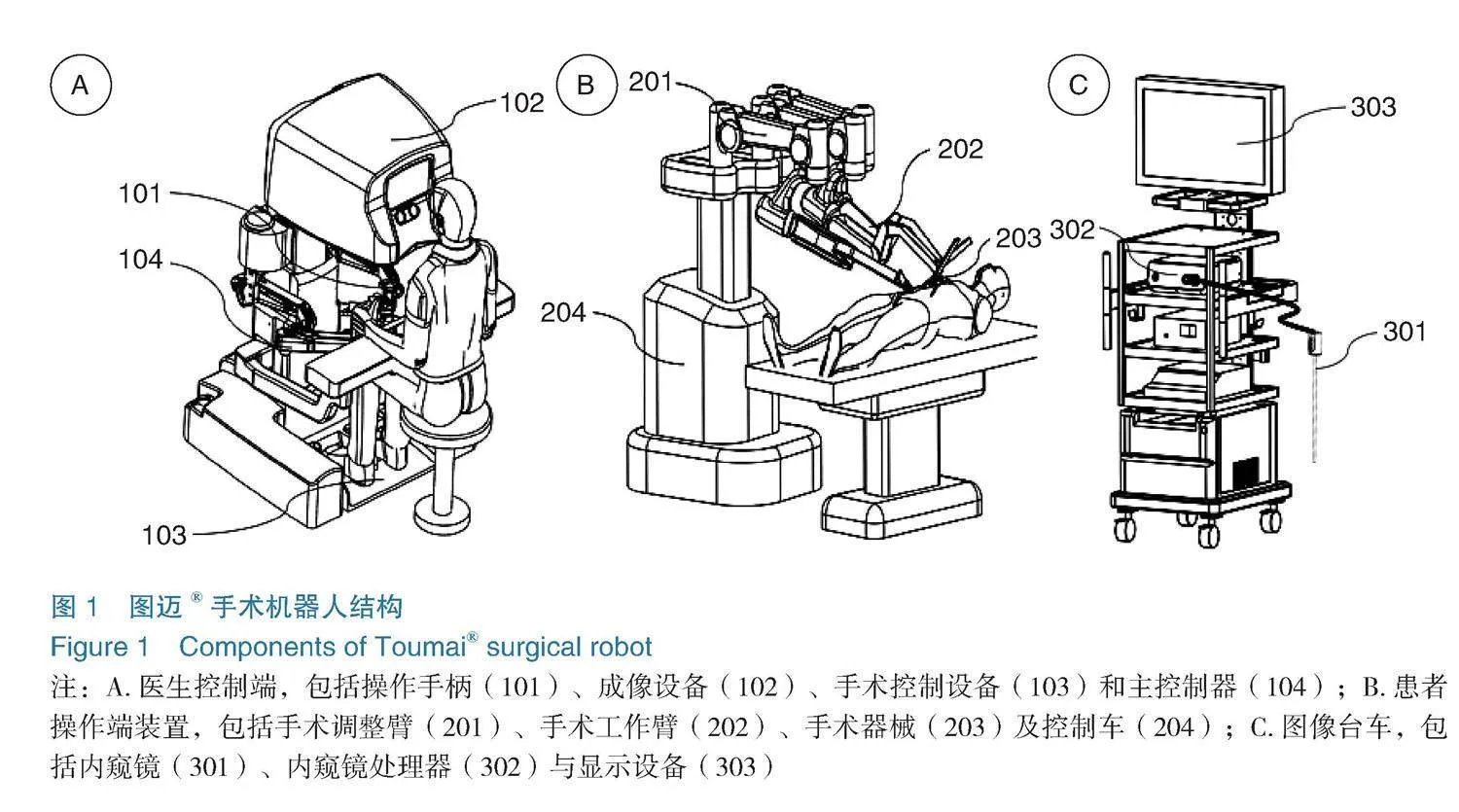
1.2.1图迈®机器人手术系统 图迈®机器人手术系统分为医生控制端(包括主操控台和副操控台)、患者操作端装置、图像台车三部分(如图1)。主操控台为远程医生控制台,位于移动手术车厢内,依次到达不同手术地点。副操控台、患者操作端装置和图像台车位于甘肃省人民医院动物手术室。
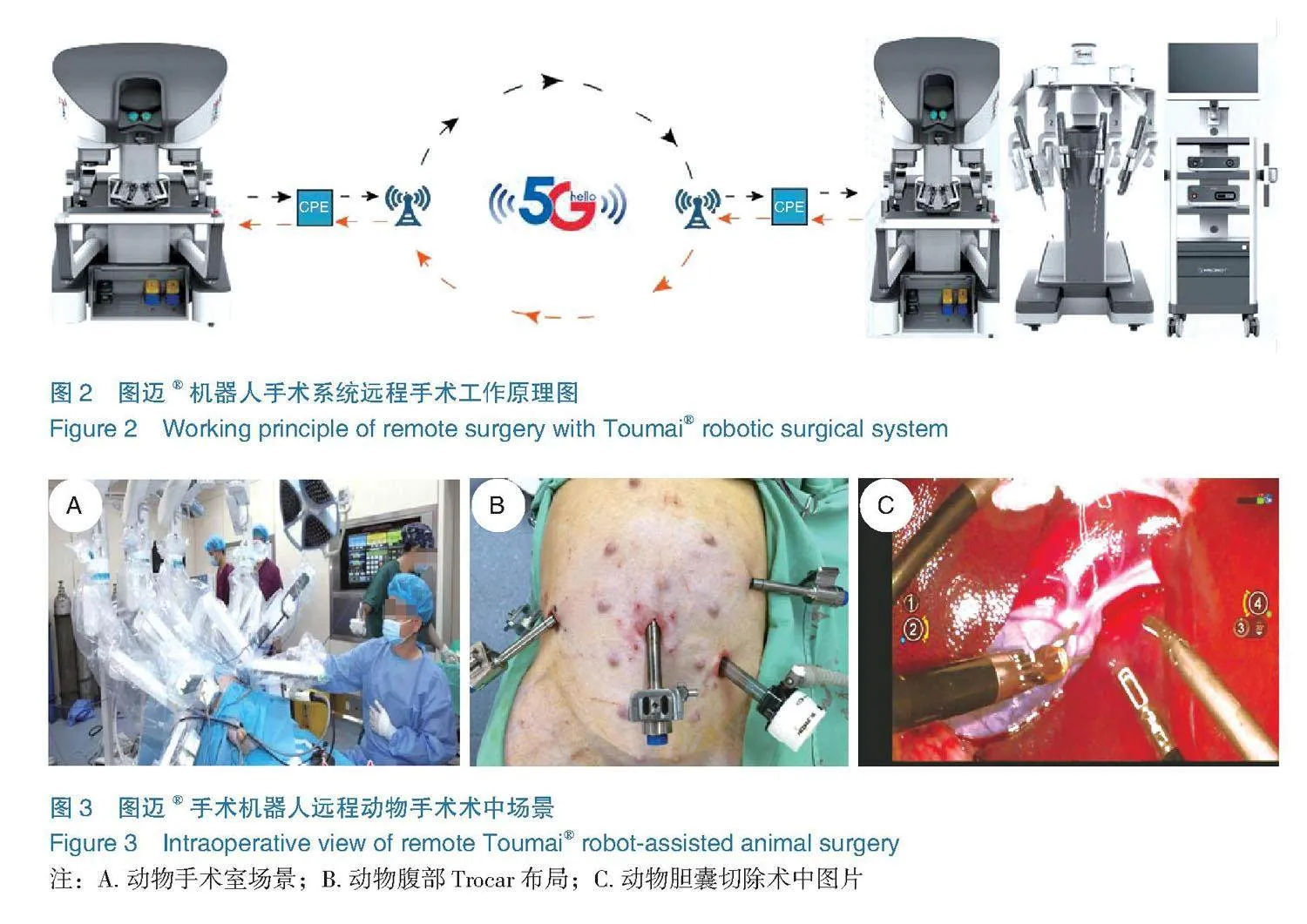
1.2.2 5G网络连接与网络安全系统 采用“中国电信”的5G通信服务和通信方案(如图2),使两端可以实现音频、视频和手术场景的实时信息交互,实现大带宽、低时延和高速率,打破远程手术地域和时间限制。5G客户端设备(Customer Premise Equipment,CPE)是5G基站产生的无线网络信号的终端接收器,医生操控台与患者手术平台分别部署5G信号环境,产生的数据由CPE传输到基站,然后通过甘肃电信5G核心网实现数据的交互。在手术过程中,医生操控台通过捕捉术者的手术操作指令并转换为控制信号,经过5G网络传输至患者手术平台,同时将控制信号转换成实际的机械臂动作。同样,在患者手术端的内窥镜图像平台不断捕捉手术视野,并在显示器上以2D图像呈现给助手观看,同时术野图像信息被CPE发送至5G基站,通过甘肃电信5G核心网将数据传输到主刀医生操控台的3D显示器上。此外,在甘肃省人民医院动物手术室配备1台副操作台,如果术中发生网络或机器相关不良事件时可进行接管,以此保证手术安全顺利进行。
1.3手术程序 麻醉成功后,将实验动物以仰卧位固定于手术台。对手术区域进行备皮,全腹部消毒,常规铺巾,体位固定到头高脚低30°、左倾20°。脐下缘切开皮肤1.1 cm,置入10 mm Trocar,连接3号镜头臂,并建立CO2气腹,设置腹内压12 mmHg,在机器人视野下插入其他Trocar。各机械臂连接成功后在3D视野下开始操作。1号臂钳夹小纱布块挡住右侧肝叶暴露胆囊,2号臂进入抓钳提起胆囊颈部,4号臂超声刀先分离并切断胆囊管和胆囊动脉,再分离胆囊,从辅助孔取出胆囊,缝线缝合腹膜及皮肤。
1.4统计学方法 本实验数据采用SPSS 25.0软件进行统计学分析,定量资料结果以均数±标准差(x±s)表示,定性资料如实表述。
2 结果
2.1实验环境 本研究从2022年8月20日开始,依次在甘肃省人民医院新区分院、甘肃省武威医学科学院肿瘤医院、金塔县人民医院、酒泉市人民医院、嘉峪关市中医医院和嘉峪关城楼户外进行实验,历时15 d,累计往返距离gt;3000 km,
最远的手术距离约为780 km。在世界范围内,这是多地对一站5G远程机器人手术的首次报道,也是世界上首次在户外进行远程手术。
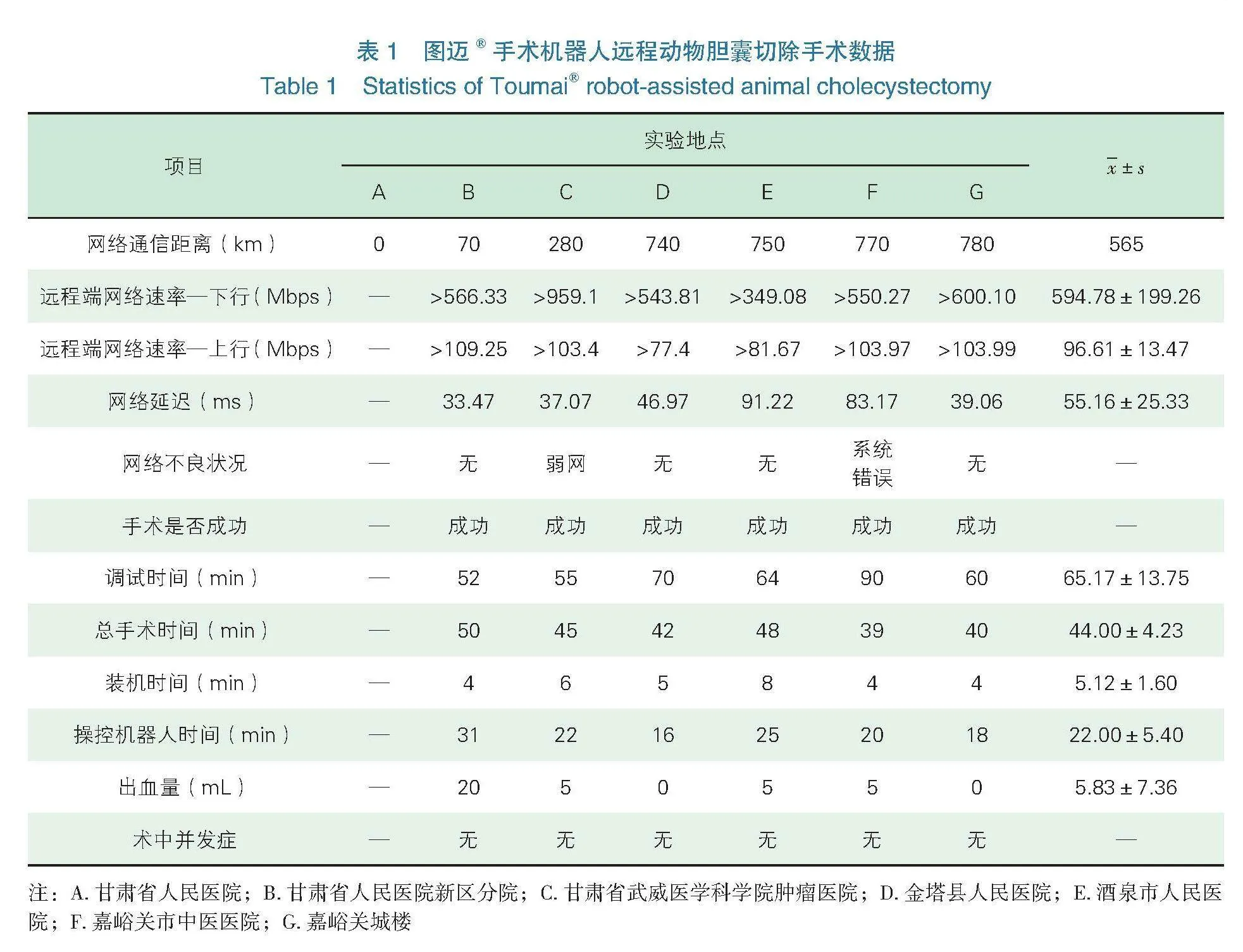
2.2 5G网络状况 整个远程手术过程是通过5G无线网络和CPE来实现医生操控台与患者手术平台之间的连接。本地端网速:上行带宽
gt;91.2 Mbps,下行带宽gt;582.3 Mbps;远程端平均网速:上行带宽gt;96.61 Mbps,下行带宽gt;594.78 Mbps
(见表1)。本次研究中,当两端都连接到5G
无线网络时,平均网络延迟为(55.16±25.33) ms,
可以保证整个远程手术过程的顺利进行。C站手术中提示弱网1次,医生主动暂停手术,网络状态恢复后继续手术。E站手术中出现系统错误1次,远程端失去控制权,由本地端快速接管手术,错误解除后再次切换到远程操作。
2.3手术相关结果 本实验通过图迈®手术机器人远程操作,成功完成6例动物胆囊切除手术
(如图3),在整个手术过程中所有动物均保持正常生命体征。平均调试时间为(65.17±13.75)min,
平均装机时间为(5.12±1.60) min,平均机器人操控时间为(22.00±5.40) min,平均总手术时间为(44.00±4.23) min,平均失血量为(5.83±7.36) mL,无术中并发症记录(见表1)。
3 讨论
随着科学技术的飞速进步,人工智能(AI)与医疗领域的结合日益紧密,为医疗质量和高端医疗服务带来了前所未有的发展契机,而手术机器人在临床中的广泛应用已成为大趋势。这类高科技设备不仅提高了手术的精确度和安全性,还显著减轻了医护人员的体力负担,使复杂手术变得更加可行。在这样的背景下,达芬奇手术机器人凭借其卓越的性能和持续的研发更新,几乎完全垄断了国际市场,成为手术机器人领域的标杆。垄断的存在往往导致市场价格上涨,患者医疗费用增加,并可能阻碍技术的持续发展和创新。因此,国产手术机器人的迅速研发与应用是打破国际垄断、降低医疗费用、推动医疗技术进步的重要途径。同时,国产手术机器人的成功研发和应用还将促进国内医疗器械产业的升级,提高国际竞争力。
2019年11月1日,上海微创公司自主研发的图迈®手术机器人在上海市东方医院完成了机器人辅助腹腔镜下前列腺癌根治术,图迈®手术机器人也成为中国首个完成高难度泌尿外科手术的腔镜机器人,这也标志着国产腔镜机器人研发成功。2022年6月11日,新疆克州人民医院与江苏省人民医院通过5G连线,顺利完成了2台泌尿外科5G超远程图迈®机器人手术,实现了迄今为止世界最远距离的5G远程机器人手术[14]。为进一步加快国产图迈®手术机器人的远程手术功能研发,本团队在全球第一次尝试多地对一站5G远程机器人动物胆囊切除手术。
本研究创新性地采用了“多地对一站”的实验模式,旨在降低长距离运输机械与实验动物所带来的高昂成本。相较于单独移动医生控制台,此方案更为经济可行,且未偏离医生与患者操作台均在5G网络环境下、间隔不同距离进行手术的核心要求。同时,该设计确保了实验动物的安全与仪器的稳定,进一步提升了实验的可行性与科学性。
在后续试验中,本团队于甘肃省人民医院本部及其新区分院(相距70 km)成功开展了10例
远程机器人胆囊切除手术的双向验证,证实了国产手术机器人的远程操作能力,初步结果令人满意。此外,国产手术机器人正逐步在酒泉、武威等地装机,为即将开展的三期临床试验奠定坚实基础。届时,每个试验点均将配备手术机器人,通过5G远程网络技术实现医生控制台的远程操作,进一步提升试验效率与准确性。
在总结了前期国家级临床试验的经验后,本中心于2022年8月20日开展了远程5G国产手术机器人的动物实验研究,研究中6例动物实验都成功完成。与一项达芬奇机器人Meta分析[15]相比,图迈®手术机器人在操控机器人时间、总手术时间及失血量方面初步显示出了一定的优势。考虑主要是以下原因:①图迈®手术机器人的腔内腕关节灵活性和稳定性较高;②图迈®手术机器人自主研发的蜻蜓眼®3D腔镜系统,可以为术者提供更加立体真实的手术视野,直觉式主从遥操作灵敏易上手,有助于简化手术操作,缩短手术时间。③6例实验均未发生任何术中并发症,这进一步证明了国产图迈®手术机器人的安全性。
稳定的网络也是进行远程机器人手术的重要环节。2019年6月,中国正式宣布进入5G时代。每一次科技跃迁与技术进步,都极大地促进了医疗事业的发展。医疗行业必须抓住5G网络技术的机遇,以满足现代医疗服务日益增长的需求[16]。互联网和卫星网络是以往远程手术的常用网络[17-18],但它需要特殊的网络线路或光纤电缆连接。而5G网络消除了专用网线的地域限制,两个站点之间可以通过无线连接进行远程手术。查阅文献可知,本研究是5G网络联合图迈®手术机器人在普通外科领域的第一个临床前研究。5G网络技术具有高速率、低时延、高密度、高频谱、高效率、信息传输不受时间和空间限制等优势,使信息交互更加方便快捷[19]。本研究中,5G无线网络连接的平均延迟时间为55.16 ms,较有线互联网略高。有研究认为,远程手术的理想延迟时间应小于100 ms,但只要延迟时间小于300 ms,则可以满足手术要求,外科医生可以毫无困难地适应并完成手术[20]。
展望未来,远程机器人手术模式将持续拓展,对相关操作人员的专业培训显得尤为关键。尽管达芬奇手术机器人手术培训迅速增长,但国内配备该设备的医院占比仍有限。当前,国产机器人外科医生培训认证体系尚属空白,特别是针对图迈®手术机器人的专业培训课程亟待开发。 随着图迈®手术机器人在国内市场的普及,构建完善的培训与认证体系迫在眉睫,以保障患者安全与手术质量。
本研究开创性地实施了外科领域世界首次“一站对多地”的5G远程胆囊切除术动物实验,并首次在户外复杂环境中验证了5G远程手术的稳定性和可靠性,为野外应急救援远程机器人手术的可行性和安全性提供了重要参考。然而,本研究也存在局限性,如仅限于动物小样本、中等距离的简单手术操作,缺乏大样本、长距离(gt;1000 km)及复杂手术的数据支持,且对并发症的探索有限。后续,本团队将深入开展大样本、长距离的复杂手术动物研究,全面验证5G远程手术的可行性、安全性及稳定性。同时,还将评估5G远程手术对患者及医疗保健系统的经济影响,以期为该技术的推广提供科学依据,推动远程医疗技术的持续进步与发展。
综上所述,本研究经过周密的实验设计与实施,有力地证实了国产图迈®手术机器人在5G网络环境下具备为实验动物实施远程手术的安全性与稳定性。这一重要发现不仅为后续推进5G远程手术奠定了坚实的理论基础,而且为我国远程外科领域的创新发展提供了宝贵的启示与借鉴。本次研究成果表明,图迈®手术机器人在5G通信技术的加持下,能够跨越空间限制,实现远程精准操作,展现了其在外科领域的巨大应用潜力。展望未来,我们将继续深化研究,积极探索5G远程机器人手术的临床应用,以期为中国乃至全球的医疗卫生事业作出更大的
贡献。
利益冲突声明:本文不存在任何利益冲突。
作者贡献声明:蔡辉负责实验设计;马云涛负责获取研究经费及提供支持性贡献;马世勋、狐鸣负责实验的实施及文章撰写;景武堂、龚世怡、杨佳负责采集数据,统计并分析数据;杨婧、田宏伟负责对文章的知识性内容作批判性审阅及修改。
致谢:感谢上海微创有限责任公司为本研究提供的图迈®手术机器人系统和技术支持,感谢中国电信有限责任公司提供的5G网络信号连接和技术支持,最后感谢参与此次动物实验研究的全体工作人员。
参考文献
[1] Vimalananda V G, Brito J P, Eiland L A, et al. Appropriate use of telehealth visits in endocrinology: policy perspective of the endocrine society [J]. J Clin Endocrinol Metab, 2022, 107(11): 2953-2962.
[2] Sosnowski R, Kamecki H, Joniau S, et al. Introduction of telemedicine during the COVID-19 pandemic: a challenge for now, an opportunity for the future [J]. Eur Urol, 2020, 78(6): 820-821.
[3] Boehm K, Ziewers S, Brandt M P, et al. Telemedicine online visits in urology during the COVID-19 pandemic-potential, risk factors, and patients’ perspective [J]. Eur Urol, 2020, 78(1): 16-20.
[4] Marescaux J, Leroy J, Gagner M, et al. Transatlantic robot-assisted telesurgery [J]. Nature, 2001, 413(6854): 379-380.
[5] Marescaux J, Leroy J, Rubino F, et al. Transcontinental robot-assisted remote telesurgery: feasibility and potential applications [J]. Ann Surg, 2002, 235(4): 487-492.
[6] 张辉. 加快5G网络建设及应用支撑经济高质量发展—工业和信息化部发布《关于推动5G加快发展的通知》[J].网信军民融合, 2020, (4): 37-39.
[7] Cadière G B, Himpens J, Germay O, et al. Feasibility of robotic laparoscopic surgery: 146 cases [J]. World J Surg, 2001, 25(11): 1467-1477.
[8] Fanfani F, Monterossi G, Fagotti A, et al. The new robotic TELELAP ALF-X in gynecological surgery: single-center experience [J]. Surg Endosc, 2016, 30(1): 215-221.
[9] YI B, WANG G H, LI J M, et al. The first clinical use of domestically produced Chinese minimally invasive surgical robot system “Micro Hand S” [J]. Surg Endosc, 2016, 30(6): 2649-2655.
[10] Hwang M, Kwon D S. K-FLEX: a flexible robotic platform for scar-free endoscopic surgery [J]. Int J Med Robot, 2020, 16(2): e2078.
[11] Lim J H, Lee W J, Park D W, et al. Robotic cholecystectomy using Revo-i Model MSR-5000, the newly developed Korean robotic surgical system: a preclinical study [J]. Surg Endosc, 2017, 31(8): 3391-3397.
[12] 佚名. “图迈”腔镜手术机器人获批上市 [J].传感器世界, 2022, 28(2): 38.
[13] 黄佳, 田禹, 陆佩吉, 等. 国产图迈®微创腔镜手术机器人辅助右肺上叶切除两例[J]. 中国胸心血管外科临床杂志, 2022, 29(4): 519-523.
[14] 盛俊杰, 胡庆元, 王可洲, 等. 《美国公共卫生署人道管理和使用实验动物政策》(2015年版)简介 [J]. 实验动物与比较医学, 2017, 37(4): 303-308.
[15] 周翔, 王家寅, 朱祥, 等. 超远程5G机器人辅助腹腔镜下精索静脉高位结扎术2例报道及文献复习 [J]. 中华男科学杂志, 2022, 28(8): 696-701.
[16] 韩彩文, 姚亮, 闫沛静, 等. 机器人辅助与传统腹腔镜胆囊切除术治疗良性胆囊疾病疗效比较的Meta分析 [J]. 中国普通外科杂志, 2018, 27(8): 955-967.
[17] Qureshi H N, Manalastas M, Zaidi S M , et al. Service level agreements for 5G and beyond: overview, challenges and enablers of 5G-healthcare systems [J]. IEEE Access, 2021. DOI: 10.1109/ACCESS.2020.3046927.
[18] Nguan C, Miller B, Patel R, et al. Pre-clinical remote telesurgery trial of a da Vinci telesurgery prototype [J]. Int J Med Robot, 2008, 4(4): 304-309.
[19] Rayman R, Croome K, Galbraith N, et al. Robotic telesurgery: a real-world comparison of ground-and satellite-based internet performance [J].
Int J Med Robot, 2007, 3(2): 111-116.
[20] You I, Sharma V, Atiquzzaman M, et al. GDTN: Genome-based delay tolerant network formation in Heterogeneous 5G using inter-UA collaboration [J]. PLoS One, 2016, 11(12): e0167913.
[21] Xu S, Perez M, Yang K, et al. Determination of the latency effects on surgical performance and the acceptable latency levels in telesurgery using the dV-Trainer (®) simulator [J]. Surg Endosc, 2014, 28(9): 2569-2576.
收稿日期:2024-08-27
编辑:刘静凯
基金项目:国家自然科学基金(82260031);甘肃省自然科学基金(21JR11RA186);甘肃省青年科技基金(20JR10RA415);甘肃省院内科研基金项目(21GSSYB-8,20GSSY5-2)
Foundation Item: National Natural Science Foundation of China(82260031); Natural Science Foundation of Gansu Province (21JR11RA186); Youth Science and Technology Fund of Gansu Province (20JR10RA415); Scientific Research Funding Project of Gansu Provincial Hospital (21GSSYB-8, 20GSSY5-2)
通讯作者:蔡辉,Email:caialonteam@163.com;杨婧,Email:21634604@qq.com
Corresponding Author: CAI Hui, Email: caialonteam@163.com; YANG Jing, Email: 21634604@qq.com
引用格式:马世勋,狐鸣,马云涛,等.基于5G网络的图迈®手术机器人远程动物实验研究[J]. 机器人外科学杂志(中英文),2025,6(1):12-17,23.
Citation: MA S X , HU M , MA Y T , et al. Remote animal experiments with Toumai® surgical robot based on 5G network[J]. Chinese Journal of Robotic Surgery, 2025, 6(1): 12-17, 23.
注:马世勋,狐鸣为共同第一作者
Co-first author: MA Shixun, HU Ming
猜你喜欢
军事文摘(2022年20期)2023-01-10 07:18:38
英语文摘(2021年11期)2021-12-31 03:25:18
中国医学影像学杂志(2018年9期)2018-10-17 01:27:12
学生天地(2018年19期)2018-09-07 07:06:30
中国卫生标准管理(2015年25期)2016-01-14 09:29:18
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08
少儿科学周刊·儿童版(2015年4期)2015-06-17 03:37:19
卫生职业教育(2014年16期)2014-05-16 03:48:30