自主式口腔种植机器人辅助下颌all-on-6种植即刻修复一例报道(附手术视频)
2025-02-14 00:00:00张漫高小波付铭蕾雷博程赵晓敏张莹
机器人外科学 2025年1期




摘要 本研究报道1例自主式口腔种植机器人辅助下颌all-on-6种植术后即刻修复,利用自主式口腔种植机器人进一步提高种植体植入的准确性,从而有效避开重要解剖结构。手术时间约 66 min,种植体植入点和末端点的平均偏差lt;0.5 mm,平均角度lt;1°。种植手术顺利完成,术中无不良反应,术后顺利完成即刻修复。
关键词 无牙颌;All-on-6;自主式口腔种植机器人;即刻种植修复
中图分类号 R608 R783 文献标识码 A 文章编号 2096-7721(2025)01-0141-08
Mandibular all-on-6 immediate loading implant restorations assisted by an autonomous dental implant robot: a case report(with surgical video)
ZHANG Man1, 2, GAO Xiaobo1, 2, FU Minglei1, 2, LEI Bocheng3, ZHAO Xiaomin2, ZHANG Ying2
(1. Department of Stomatology, Chifeng Municipal Hospital, Chifeng 024000, China; 2.Chifeng Clinical Medicine College, Inner Mongolia Medical University, Chifeng 024000, China; 3. School of Stomatology, Chifeng University, Chifeng 024000, China)
Abstract To report a case of all-on-6 mandibular implant surgery assisted by an autonomous dental implant robot, which was utilized to further improve the accuracy of implant placement, thus effectively avoiding important anatomical structures. The operative time of all-on-6 mandibular edentulous jaw implantation by the autonomous oral implantation robot was about 66 min, the average deviation between the implant implantation point and the end point was less than 0.5 mm, and the average angular deviation was less than 1°. The implant surgery went smoothly, with no intraoperative adverse reactions, and the immediate postoperative restoration was successfully completed.
Key words Edentulous Jaw; All-on-6; Autonomous Dental Implant Robot; Immediate Implant Restoration
口腔种植技术已经成为治疗牙列缺失患者的首选方法。终末期牙列患者通常年龄较大且手术耐受力较差,牙槽骨吸收较为严重导致窦嵴距减小[1],因此限制了传统口腔种植手术的应用[2]。机器人辅助口腔种植手术克服了传统手术的限制,具有许多优势。首先,它突破了术野空间的限制,传统手术需要医生凭借经验进行操作,但是机器人可以通过数据拟合与图像配准,实时控制机械手臂的路径,从而保证手术的精准和一致;其次,机器人辅助口腔种植手术还具有精准定位的优势,机器人能够在视觉导航下找到最佳的种植位置,从而提高手术的成功率;再次,机器人辅助种植手术相对安全、稳定,机器人手术系统在手术过程中可以提供稳定的操作平台,减少手术中的不稳定因素,从而降低手术风险;最后,机器人还可以实现微创治疗,相比传统手术,机器人操作更精细,创伤更小,患者恢复时间也更短[3]。
本研究报道1例自主式口腔种植机器人辅助all-on-6种植即刻修复下颌剩余骨量不足的无牙颌患者。
1 病例资料
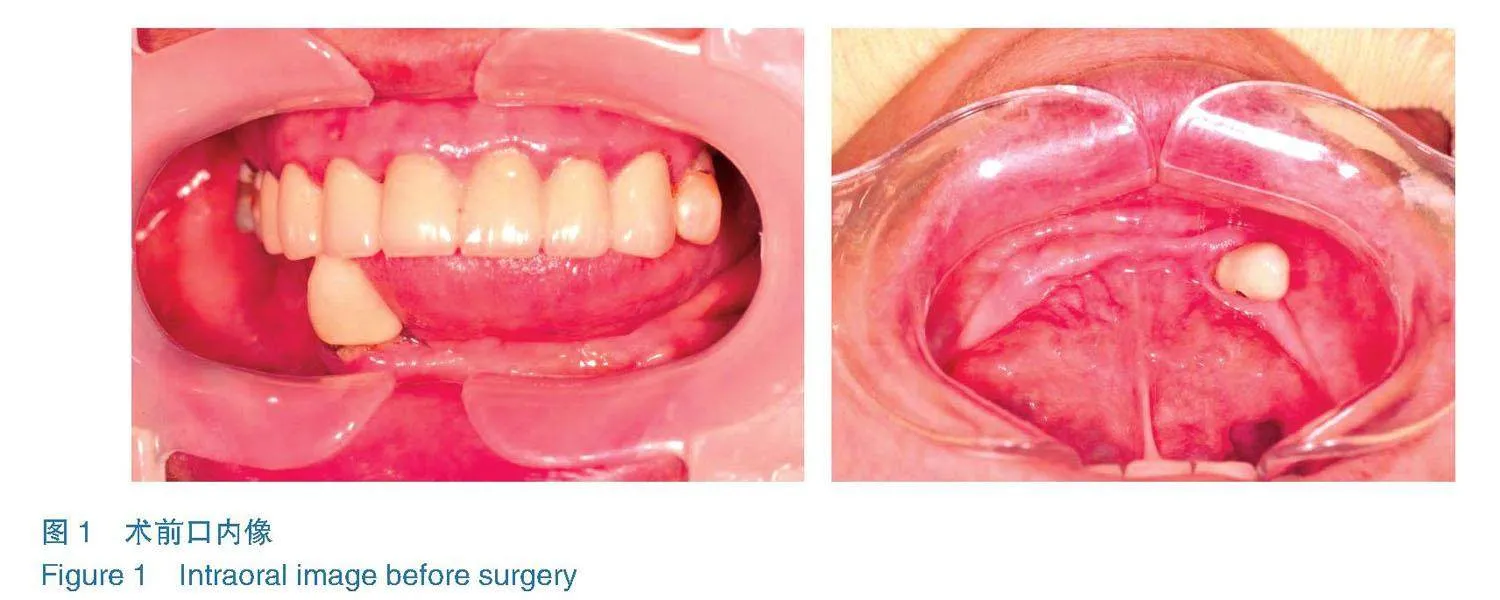
患者,女,60岁,下颌仅存右下尖牙,佩戴下颌总义齿多年,义齿固位差,要求种植修复,既往无特殊病史。体格检查:上颌为13-23全瓷冠桥固定修复,边缘密合,固位佳,低位笑线,牙龈生物性为薄龈型(如图1~2),下颌仅余留43,松动Ⅱ度,叩痛(+),缺牙区牙龈色粉红质韧,剩余牙槽骨萎缩,前庭沟浅,附着龈宽度不足;口腔锥形束CT(Cone Beam Computer Tomography,CBCT)示下颌刃状牙槽嵴,根据测量牙槽骨三维尺寸,术前种植体设计如图3。诊断结果:下颌牙列缺损(31-37,41,42,44-47);43慢性根尖周炎;慢性牙周炎。治疗计划:拔除43,自主式口腔种植机器人辅助下颌无牙颌种植6颗Straumann® BL种植体,并行all-on-6种植即刻修复。
2 手术方法
2.1种植术前准备工作及手术过程 拍摄CBCT,
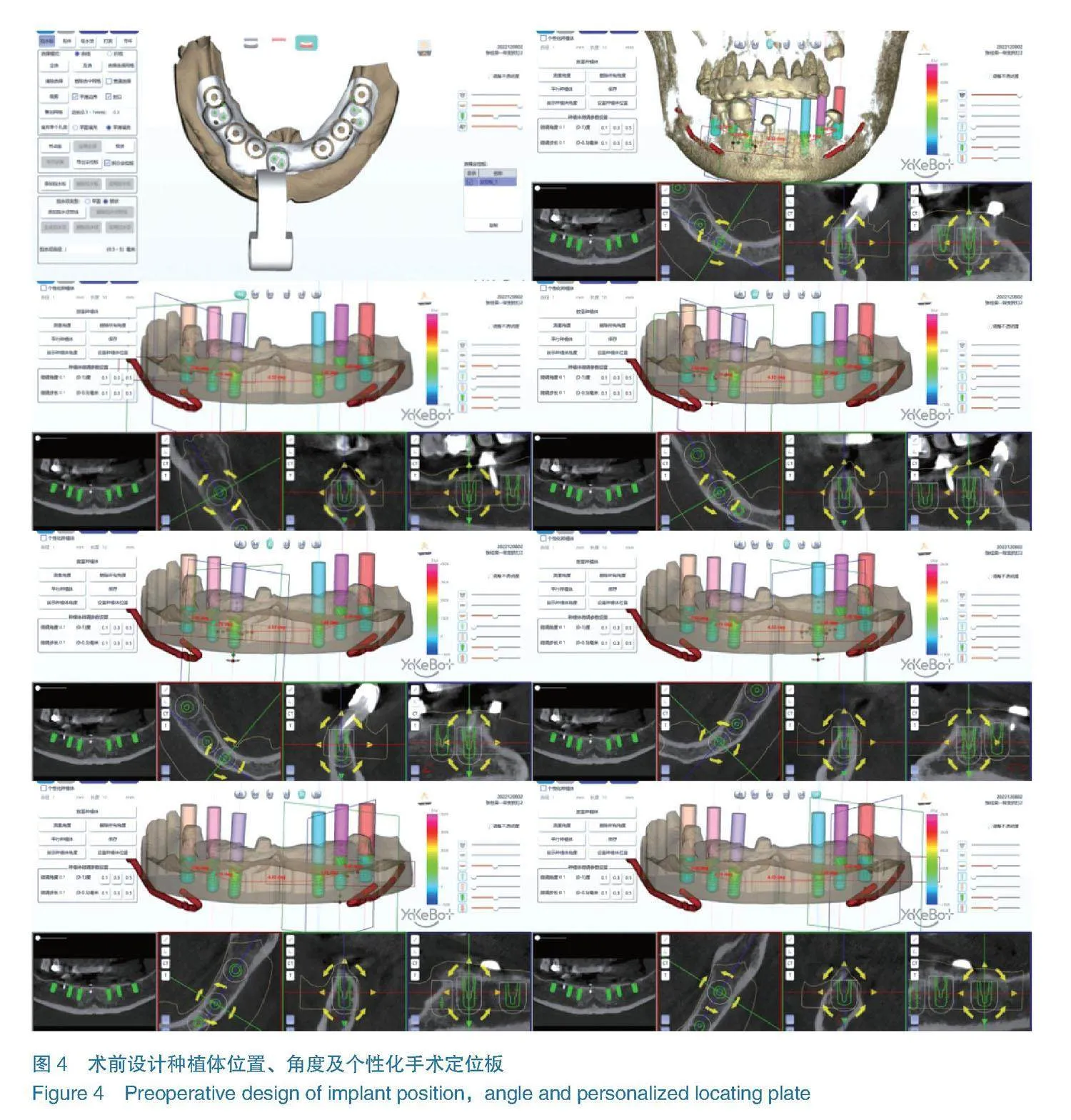
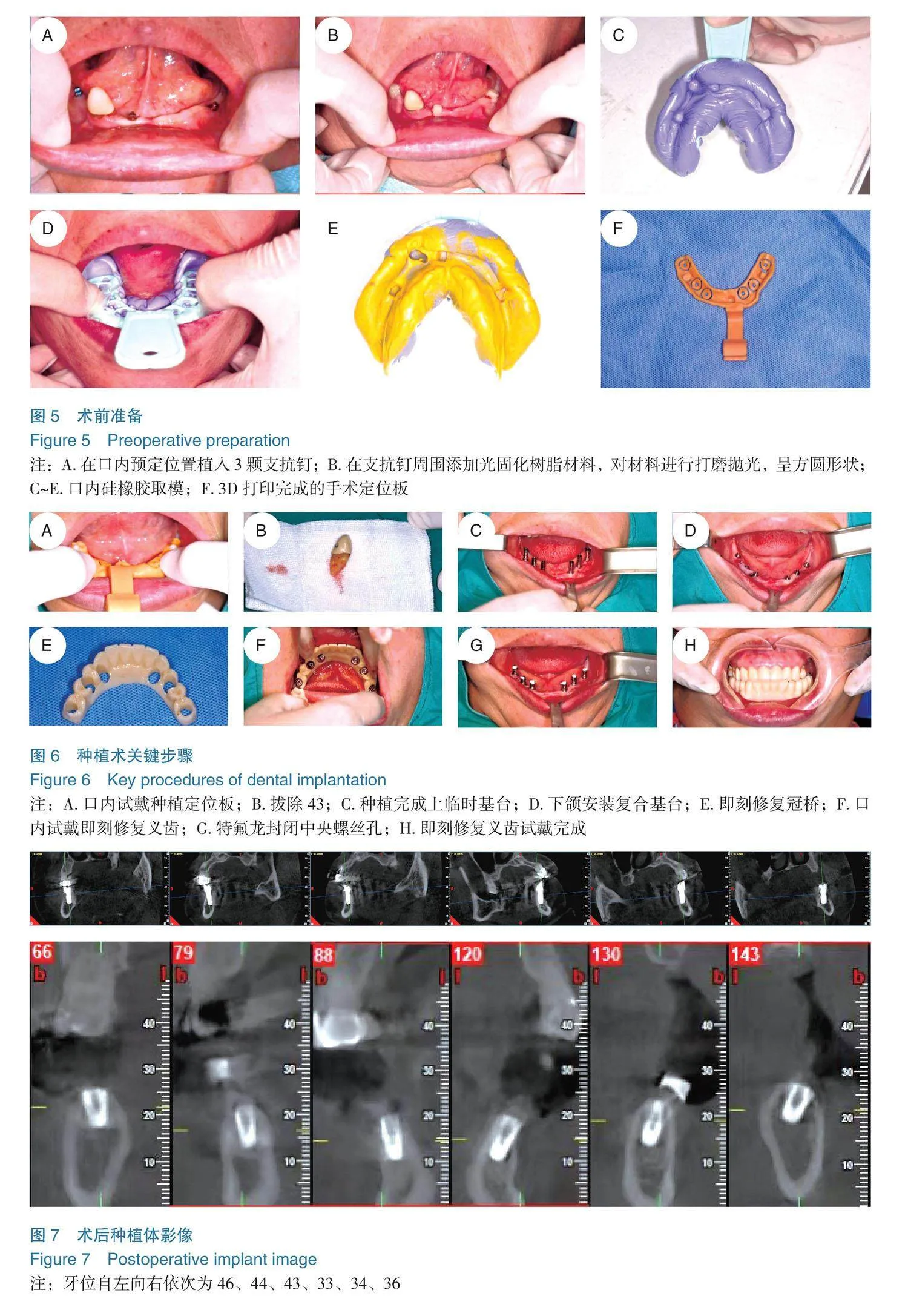
根据患者诉求进行下颌种植方案设计(如图4),充分告知患者种植手术的治疗程序、自主式口腔种植机器人的工作原理、适应证、风险及愈后,患者表示知情同意。完善术前相关检查,排除手术禁忌。将CBCT扫描数据导入种植机器人软件中进行三维影像重建及种植体位置规划,设计并3D打印手术定位板,根据术前规划制作即刻修复树脂冠桥。嘱患者用氯已定漱口液含漱,根据种植牙位调整体位,口内及口周皮肤消毒铺巾后行下颌阿替卡因局部浸润麻醉,手术定位板消毒后干燥备用。根据患者的口腔情况及CBCT骨量的评估,方案为拔除43后选择33、34、36、43、44、46作为种植位点。术前在口内预定位置植入3颗支抗钉,在支抗钉周围添加光固化树脂材料,对材料进行打磨抛光,呈方圆形状,口内硅橡胶取模获取石膏模型(如图5)。拍摄患者口内支抗钉CBCT,获得的数据与口扫STL数据配准,术中由医生更换逐级备洞钻针,通过机器人控制种植手机主动备洞并植入6颗Straumann® BL种植体。在手术过程中,医生可观察机械臂的手术入路和各种参数,脚踏可控制机械臂的运动进程。若备洞过程中,机械臂检测出种植位点产生偏差,软件自动报警并停止手术。
2.2种植术后即刻负重 研究表明,无牙颌的即刻负重有利于种植体周围骨组织的新生与重
建[4],种植体支持的固定义齿行即刻负重,已被认为是一种证据较为充分的负重方案[5-6]。因此,在种植术后安装复合基台,直接使用预先制作好的下半口树脂桥架进行即刻修复(如图6)。影像学检查基台及义齿就位良好,患者面形有较大改善,口唇丰满度良好。
2.3结果 通过信息的采集与整合、种植体三维位置的设计及定位板的设计与加工,顺利完成自主式机器人辅助无牙颌种植的微创手术,不翻瓣下主动完成种植体的植入,术前准备时间(从固定定位板到开始预备窝洞)约42 min,手术时间约66 min。术后即刻拍摄CBCT(如图7),将CBCT数据导入机器人软件中进行种植精度分析,通过测量种植体的实际位置与规划位置之间的距离得出偏差,包括种植体植入点偏差、种植体末端点偏差和角度偏差。术后精度分析结果显示,种植体植入点和末端点的平均偏差lt;0.5 mm,种植体的平均角度偏差lt;1°(见表1)。
2.4术后复查 即刻修复术后1个月,患者自述义齿断裂来诊。检查见46牙位义齿断裂,46种植体松动。遂取下树脂桥架,调磨45远中,46去除复合基台,更换为愈合帽观察。术后4个月
复诊,46种植体松动无好转,拔除46种植体。术后7个月复查,CBCT示46牙窝愈合良好,重新行46种植,安装复合基台,其余5颗种植体行一段式固定义齿制作。观察临时义齿的咬合,并且记录其正中、前伸及侧方咬合记录,拆除临时义齿,取印模,面弓转移,全可调颌架上进行一段式固定义齿蜡型制备。蜡型在患者口内试戴合适后,制作纯钛桥架及树脂牙,与对颌牙正中均匀接触,功能运动时无咬合干扰。影像学检查义齿就位良好。
2.5永久修复 术后10个月ISQ检查动度测量值均gt;74。因患者对临时全口义齿较满意,颞下颌关节无不适,故以现有义齿为指导进行位记录。下颌6颗种植体采用开窗式取模,下颌设计整体纯钛切削桥架,全瓷冠排牙,将下颌整体桥架用复合基台中央螺丝固定,扭力gt;15 Ncm
(如图8)。
患者咬合关系良好,面部丰满度良好,正中关系正确,精细调为全口平衡,调完成后咀嚼效果好,无咬舌、咬腮现象(如图9)。
患者永久修复6个月后来院随访,检查咬合稳定,口腔卫生佳,在义齿的舌侧有少量软垢,影像学检查种植体周围牙槽骨未见明显吸收(如图10)。常规对患者进行口腔卫生宣教,采用专用的种植体维护工具对患者的义齿进行清洁,并嘱患者定时来诊复查维护。
3 讨论
口腔种植技术是一种修复牙列缺损和牙列缺失常用的方法,其成功率受多种因素的影响,包括种植体的位置、角度和深度等[6-8]。近年来,手术机器人在医疗行业内不断发展,不仅被广泛应用于神经外科、脊柱外科、血管外科等,在口腔医学领域也得到了应用,包括口腔修复、正畸和颌面外科等[3]。口腔种植导航技术能够显著提高口腔种植手术的精度和安全性,通过使用数字化外科导板和计算机辅助动态导航技术,医生可以更准确地确定种植体的位置和角度,从而提高手术的成功率。然而,这些导航技术也存在一些问题,例如需要预先获取患者的口腔扫描数据,以及导板与患者口腔的适配性等[9-10]。
随着口腔种植手术机器人的升级,现在可以通过控制自主式口腔种植机器人的机械臂来主动完成种植窝洞的预备。机器人可以根据术前规划,精确地控制窝洞预备的位置和深度,从而确保种植体的准确植入。此外,机器人还能够自动停止下钻,以避免可能造成的伤害。这种机器人辅助下的种植技术不仅提高了手术的精确性,还可以降低医生的操作难度,为患者带来更好的治疗体验[9-11]。
3.1数字化种植技术的研究进展及精度分析 近年来,数字化导板和计算机辅助动态导航技术被引入口腔种植手术。相较于传统自由手种植,它们在种植精度上有着明显的优势。国内外的研究[5,8-10]表明数字化外科导板辅助的静态导航手术和计算机辅助动态导航手术精度基本一致,均优于传统自由手种植手术。Tencati E
等人[12]报道的自由手种植手术后种植体位置与术前规划相比的偏差为(1.86±0.77) mm,种植体根尖点偏差为(2.40±1.00) mm,角度偏差为(6.68±4.06)°,这说明在自由手种植术中存在较大的偏差,可能会影响手术结果。2021年,Bolding S L等人[13]使用Yomi机器人进行口腔种植手术,结果表明,角度偏差为(2.56±1.48)°,肩部偏差为(1.04±0.70)mm,根部偏差为(0.95±0.73)mm,显示Yomi机器人在种植体定位方面具有较高的精确性。综上所述,数字化技术在口腔种植手术中能显著提升种植体定位的精准性,相较于传统自由手种植,它能够减小定位偏差,提高手术成功率。然而,不同技术之间仍存在差异,医生应根据患者具体情况选择最适合的导航技术。Somogyi-Ganss E
等人[14]的研究发现,采用动态导航技术进行植入时,偶尔会出现很大的偏差,这一现象值得引起重视,也提示我们即便是使用机器人进行种植手术,也要保持一定的安全间距,以免对相邻牙齿和周边的关键解剖结构造成损害。
种植体的精确植入是保证种植手术成功的重要因素。若种植体植入位置不当,将极大地增加后期种植修复的困难,且由于其力学因素的变化,可能会导致患者的创伤性骨吸收以及种植体的劈裂、断裂等问题[15]。与传统自由手种植相比,自主式口腔机器人种植的优点较为突出,其可以在术前进行种植方案的规划,从而避免对口腔解剖组织造成损伤,实现以修复为导向的种植手术[15-16]。
当前,学者们提出以下几个因素会影响种植手术的精确性[16-18]:①CBCT扫描,包括CBCT扫描厚度、体素尺寸、图像导入和图像解析能力;②定位装置的制作、放置位置、放置方法等;③定位,即将手术计划与手术中的软组织、硬组织进行定点匹配;④其他人为因素等。另外,有研究表明,术者的手部颤动和感觉等因素可能会对钻孔及种植体的定位产生一定的影响,因此术者始终起着主导作用。
口腔种植手术机器人特别适用于以下情形:①不翻瓣种植;②在种植体之间以及种植体与天然牙之间的距离、夹角等方面需要严格掌握时;③需要躲避重要解剖时,比如下颌神经管、上颌窦底等;④患者开口度过小、术野在后牙区不能直视时[19]。因此,自主式口腔种植机器人在国内外依然处于起步阶段,有待于未来进行更多的临床和前期研究。
3.2无牙颌种植后的即刻负重 有学者认为,植入扭力和种植体初期稳定性呈正相关,因此欲行即刻修复者须考虑选择骨质致密的部位植入种植体,以保证其良好的初期稳定性。如果术中通过颌骨骨质和种植体植入的扭矩判断,无法达到良好的初始稳定性,切忌即刻修复[20]。
研究表明,骨密度与种植体无牙颌种植后的即刻负重适应证为:①种植区有足够骨量,骨的类型要求Ⅰ~Ⅲ类;②种植体植入扭力gt;35 Ncm;
③种植体长度gt;10 mm,直径gt;3.5 mm;④种植体在牙弓上理想的分布形态为弧形,可限制即刻负重时种植体的微小动度[21]。针对本例患者,即刻修复术后1个月,右下第一磨牙种植位点出现疼痛,检查临时修复体及牙龈,发现修复体折断且46种植体松动,可能原因是46骨质属于三类骨质,获得初期稳定性的难度较高,即刻负重后导致种植体骨结合失败,也可能与患者右侧咬合习惯及咀嚼力较大有关。因此调改临时修复体避开46牙龈,待46窝洞愈合后重新植入种植体,剩余5颗继续佩戴临时修复体。4个月后行46自由手种植,术后影像学显示种植体位置佳,7个月后种植体骨结合良好,行26、27连冠修复,下颌all-on-6开窗印模,制作纯钛桥架及全瓷冠修复。
若在手术当时医生通过分析种植体初期稳定性判断后,采用33、34、36、43、44即刻负重,46潜入式愈合,术后3个月46行种植二期手术后下半口取模修复会取得更完美的效果。另外,在选择种植体时可以根据患者骨质选择锥形种植体配合极差备洞,有望获得更高的初期稳定性及更满意的结果。
3.3自主式口腔种植机器人的未来发展趋势 无牙颌种植流程中包含两种模式,即传统模式和创牙模式。传统模式是通过制作放射导板,拍摄CBCT结合数字化软件提取的导板数据获得黏膜数据制作修复义齿,通过模型配准进行种植手术;创牙模式主要通过设计术中个性化定位板辅助种植手术。起主导作用的3个关键步骤分别是:种植方案的制定,种植手术的实施和修复,以及后期维护。种植方案的制定阶段需要导入患者影像数据,确定种植体的植入位置,制作定位板连接标定件,实现机器人与患者口内种植位置的空间位置关系转换;在手术过程中,机器人在视觉导航引导下精准地将种植体植入预先设定好的位置;手术结束后,相关软件可支持术后评估、验证种植体植入精度及相关偏差指标。自主式口腔种植机器人可与外界交互,可对由视觉接收的图像、外力、扭矩、几何偏差等微小的影响或操作人员发出的指令,在毫秒级内作出相应的响应,这些特点保证了自主式种植牙手术机器人在遇到突发事件时,可以迅速做出反应,及时停止。
应用自主式口腔种植机器人辅助种植终末期牙列,体现了以修复为导向的种植理念,不仅考虑了牙槽骨骨量、软组织轮廓和牙龈厚度,还考虑了种植体的理想位置,同时兼顾修复体位置,帮助医生获得最佳的生物力学和美学效果。
自主式口腔种植机器人系统拥有一整套自主知识产权的手术规划方案,提供了从CBCT,口扫数据导入、配准,神经管和上颌窦的勾勒,植体位置规划,修复体的设计,牙模设计,种植定位板设计,种植位置规划,到术中实时导航及术后评估等全流程的数字化种植解决方案,从种植窝洞制备到种植体植入都实现了机器人的自主控制,大大提高了种植手术的精度,降低了医生的工作强度,提高了安全系数,降低了人力成本。
4 总结
如今,“精准种植”已经进入到一个智能化的发展阶段,而自主式口腔种植机器人的研发与使用,更是推动了这一领域的发展。自主式口腔种植机器人系统是非常复杂的,要求有专门的技术人员来完成操作,能够克服人工操作疲劳和视野盲区等因素造成的人为偏差,从而提升临床操作的准确性,降低手术操作的复杂度,减少手术创伤,实现口腔种植手术的微创化。
需要注意的是,理想状态下的“全流程”口腔数字化种植技术还存在许多不足,完善“全流程”任重道远。国内外口腔种植机器人的应用才刚刚开始,不论是理论还是临床操作方面,都需要一个长期的研究历程。与传统自由手种植手术比较,机器人辅助种植术的前期预备周期较长,手术过程比较烦琐,目前的自动化程度还比较低。因此,临床上需要进行更多的实验和研究,以保证更好的治疗效果。但可以明确的是,口腔种植机器人并不能完全取代医师,临床实践中应结合二者的长处,取长补短,才能更好地服务患者。
利益冲突声明:本文不存在任何利益冲突。
作者贡献声明:张漫负责设计论文框架,数据收集,起草论文;高小波负责手术操作,研究过程的实施,论文修改;付铭蕾负责数据分析,绘制图表;雷博程负责拟定写作思路,指导撰写文章并最后定稿;赵晓敏、张莹负责文献查询与整理。
参考文献
[1] 陈琳, 魏凌飞, 陈泉林, 等. 计算机辅助动态导航技术在口腔种植手术中的应用[J]. 实用口腔医学杂志, 2020, 36(3): 477-481.
[2] Buser D, Martin W, Belser U C. Optimizing esthetics for implant restorations in the anterior maxilla: Anatomic and surgical considerations[J]. Int J Oral Maxillofac Implants, 2004, 19(Suppl): 43-61.
[3] 赵瑞峰, 李志文, 白石柱. 机器人在口腔医学领域的应用[J]. 机器人外科学杂志(中英文), 2022, 3(5): 351-366.
[4] Turkyilmaz I, Company A M, McGlumphy E A. Should edentulous patients be constrained to removable complete dentures? The use of dental implants to improve the quality of life for edentulous patients[J]. Gerodontology, 2010, 27(1): 3-10.
[5] Balmer S, Mericske-Stern R. Implant-supported bridges in the edentulous jaw. Clinical aspects of a simple treatment concept[J]. Schweiz Monatsschr Zahnmed, 2006, 116(7): 728-739.
[6] PENG L Y, WANG X, GENG W, et al. Implant restoration and stomatognathic system rehabilitation[J]. Zhonghua Kou Qiang Yi Xue Za Zhi, 2023, 58(10): 971-977.
[7] Monaco C, Arena A, Corsaletti L, et al. 2D/3D accuracies of implant position after guided surgery using different surgical protocols: a retrospective study[J]. J Prosthodont Res, 2020, 64(4): 424-430.
[8] 满毅, 周楠, 杨醒眉. 动态实时导航在口腔种植领域中的临床应用及新进展[J]. 口腔疾病防治, 2020, 28(6): 341-348.
[9] 刘艾芃, 赵娅琴, 王晓华, 等. 实时导航与传统种植牙技术的精确度研究[J]. 中国临床新医学, 2020, 13(4): 345-348.
[10] 张凯, 余孟流, 曹聪, 等. 种植手术机器人辅助完成种植手术精度的初步研究[J]. 中国医疗器械信息, 2021, 27(21): 25-28, 53.
[11] 汪饶开卷, 吕平, 姚洋. 数字化口腔种植导航的精确性评价[J]. 临床口腔医学杂志, 2019, 35(6): 380-383.
[12] Tencati E, Moy P. Accuracy of dynamic computer-aided navigation system for dental implant placement[J]. J Oral Maxillofac Surg, 2019, 77(9): e68-e69.
[13] Bolding S L, Reebye U N. Accuracy of haptic robotic guidance of dental implant surgery for completely edentulous arches[J]. J Prosthet Dent, 2022, 128(4): 639-647.
[14] Somogyi-Ganss E, Holmes H I, Jokstad A. Accuracy of a novel prototype dynamic computer-assisted surgery system[J]. Clin Oral Implants Res, 2015, 26(8): 882-890.
[15] van Assche N, Vercruyssen M, Coucke W, et al. Accuracy of computer-aided implant placement[J]. Clin Oral Implants Res, 2012, 23(Suppl 6): 112-123.
[16] Stefanelli L V, DeGroot B S, Lipton D I, et al. Accuracy of a dynamic dental implant navigation system in a private practice[J]. Int J Oral Maxillofac Implants, 2019, 34(1): 205-213.
[17] WU D, ZHOU L, YANG J, et al. Accuracy of dynamic navigation compared to static surgical guide for dental implant placement[J]. Int J Implant Dent, 2020, 6(1): 78.
[18] Widmann G, Bale R J. Accuracy in computer-aided implant surgery-a review[J]. Int J Oral Maxillofac Implants, 2006, 21(2): 305-313.
[19] Block M S, Emery R W. Static or dynamic navigation for implant placement-choosing the method of guidance[J]. J Oral Maxillofac Surg, 2016, 74(2): 269-277.
[20] WU Y Q, WANG F, FAN S C, et al. Robotics in dental implantology[J]. Oral Maxillofac Surg Clin North Am, 2019, 31(3): 513-518.
[21] 何嘉菁, 马璐. 种植覆盖义齿早期即刻负载的研究进展[J]. 临床口腔医学杂志, 2011, 27(6): 376-379.
收稿日期:2023-11-20
编辑:刘静凯
基金项目:内蒙古自治区科技厅“十四五”重点研发和成果转化计划项目(2023YFSH0054);内蒙古医科大学校级联合项目(YKD2023LH003);内蒙古自治区口腔医学会临床科研基金项目(IMSA-2024-C4)
Foundation Item: Key R amp; D and Achievement Transformation Project to the 14th Five-Year Plan of Science and Technology Department of Inner Mongolia Autonomous Region (2023YFSH0054); University Level Joint Project of Inner Mongolia Medical University (YKD2023LH003); Clinical Research Fund of Inner Mongolia Stomatological Society (IMSA-2024-C4)
通讯作者:高小波,Email:1178609705@qq.com
Corresponding Author: GAO Xiaobo, Email: 1178609705@qq.com
引用格式:张漫,高小波,付铭蕾,等. 自主式口腔种植机器人辅助下颌all-on-6种植即刻修复一例报道(附手术视频)[J]. 机器人外科学杂志(中英文),2025,6(1):141-148.
Citation: ZHANG M, GAO X B, FU M L, et al. Mandibular all-on-6 immediate loading implant restorations assisted by an autonomous dental implant robot: a case report (with surgical video)[J]. Chinese Journal of Robotic Surgery, 2025, 6(1): 141-148.
猜你喜欢
口腔医学(2021年10期)2021-12-02 02:08:06
西南国防医药(2016年6期)2016-12-01 06:01:04
海南医学(2016年8期)2016-06-08 05:43:00
中华老年口腔医学杂志(2016年5期)2016-03-01 02:24:23
中国卫生标准管理(2015年25期)2016-01-14 09:29:17
中国继续医学教育(2015年5期)2016-01-07 07:38:22
中国医疗美容(2015年2期)2015-07-19 10:11:59
中国医疗美容(2015年2期)2015-07-19 10:11:59
中国医疗美容(2015年1期)2015-07-12 10:06:37
医学研究杂志(2015年12期)2015-06-10 06:57:46