
基于CiteSpace的医疗超声机器人领域研究热点和趋势的可视化分析
2025-02-13 00:00:00范小玉曾倩尤守超
临床超声医学杂志 2025年1期







摘" " 要" " 目的" " 应用CiteSpace软件系统梳理2014~2024年国内外医疗超声机器人领域的研究热点和趋势。方法" " 计算机检索2014年1月1日至2024 年4月16日中国知网和Web of Science核心合集数据库收录的医疗超声机器人相关中英文文献。应用CiteSpace软件对文献发表时间、国家、机构、作者、关键词进行可视化分析。结果" " 共纳入中文文献323篇,英文文献880篇。2014~2024年医疗超声机器人相关英文文献发文量总体呈逐年增长趋势;中文文献发文量在2014~2020年呈小幅度增长,2020年达到峰值,而后发文情况相对零散。英文文献中发文量前3名的作者分别为Navab、Wang、Rhode,发文量最多的机构为Johns Hopkins University(58篇);中文文献中发文量前3名的作者分别为吕发勤、朱鹏、张必翔,发文量最多的机构为哈尔滨工业大学(17篇)。英文文献发文量前3名的国家分别为美国(292篇)、中国(273篇)、德国(103篇)。关键词分析结果显示,中英文文献中排名前15名的高频关键词具有一定相似性,国内外研究主要集中在超声检测、引导、三维立体成像及外科手术应用等方面。结论" " 国内外医疗超声机器人相关研究领域处于快速发展阶段,未来研究应注重作者、机构、学科间合作,以推动医疗超声机器人事业的发展。
关键词" " 超声检查;机器人技术;医学领域;可视化分析;CiteSpace
[中图法分类号]R445.1" " " [文献标识码]A
Visual analysis of research hotspots and trends in medical ultrasound robotics based on CiteSpace
FAN Xiaoyu1,ZENG Qian1,YOU Shouchao2
1.Department of Clinical Nursing,the Second Xiangya Hospital,Central South University,Changsha 410011,China.
2.Department of Clinical Nursing,the Third Hospital of Changsha,Changsha 410035,China
ABSTRACT" " Objective" " To analyze the research hotspots and trends in the field of medical ultrasound robotics at home and abroad from 2014~2024 by CiteSpace software system.Methods" " From January 1,2014 to April 16,2024,literatures related to application in medical ultrasound robots collected by CNKI and Web of Science(WOS) core collection database were searched by computer.CiteSpace software was used for visual analysis of publication time,countries,institutions,authors and keywords.Results" " Totally 323 Chinese literatures and 880 English literatures were included,the number of literatures related to medical ultrasound robots increased overall in a growing trend from 2014 to 2024.The number of Chinese literatures increased slightly from 2014 to 2020,reaching the peak in 2020,while the number of literatures after that was relatively scattered.The top three authors in English literatures were Navab,Wang,and Rhode,with Johns Hopkins University publishing the most literatures(58 papers).The top three authors in Chinese literatures were Lv Faqin,Zhu Peng and Zhang Bixiang,with Harxin Institute of Technology publishing the most literatures(17 papers).The top three countries in English literatures were the United States(292 papers),China(273 papers) and Germany(103 papers).The results of keyword analysis showed that the top 15 high-frequency keywords in Chinese and English literatures had a certain similarities,mainly focusing on ultrasonic detection,guidance,three-dimensional imaging and surgical applications.Conclusion" " The research field related to medical ultrasound robot at home and abroad is in the stage of rapid development,and the future research should focus on the cooperation among authors,institutions and disciplines to promote the development of medical ultrasound robotics.
KEY WORDS" " Ultrasonography;Robotics;Medical field;Visual analysis;CiteSpace
超声是一种安全、价廉、无创的检查技术,已成为各医院影像检查中应用最广、接受程度最高的检查之一,有助于临床医师快速做出安全诊疗策略[1-2]。然而传统超声成像技术与超声医师的专业水平密切相关,由于超声医师的专业水平参差不齐,导致其诊断结果不一,加之专业超声医师培训周期长、难度大等原因,现阶段超声医师人才紧缺,传统的超声检查已不能满足患者的医疗需求[3-4]。医疗超声机器人是在原有机器人技术基础上将超声成像系统与医疗干预相结合,是一种集信息系统、控制系统、机械系统及影像系统为一体的医疗器械。其数控系统精度高,灵活性强,不仅可通过获得高质量超声图像帮助医师精准识别病变,还可减轻超声医师的工作压力,提高医疗效率和诊断准确率,一定程度上解决了医疗资源匮乏的问题[5]。为进一步了解超声技术在医疗机器人应用的总体情况,本研究通过CiteSpace软件对近10年国内外医疗超声机器人的应用现状、研究热点和趋势进行可视化分析和总结,以期为超声技术与医疗机器人联合应用的研究及临床超声医学实践提供参考。
资料与方法
一、数据来源
中文文献以“超声”“机器人”“医疗机器人” 等为主题词检索中国知网获得,英文文献以“ultrasonic”“robot”“medical robot”等为主题词检索Web of Science核心合集数据库获得,检索时间均为2014年1月1日至2024年4月16日。
二、纳入和排除标准
纳入标准:①主题符合“超声技术与医疗机器人”并公开发表的文献;②核心学术期刊。排除标准:①文献为超声技术与医疗机器人相关的会议、通知、新闻等;②文献信息不全;③重复发表的文献等。
三、文献分析工具与方法
应用CiteSpace软件(版本:6.3.R1)对纳入文献进行分析。参数设置:时间为2014~2024年,切片设置为1年,根据不同分析主题依次选择“country”“institution”“keyword”,演算时阈值维持系统默认,结合专业知识对知识图谱进行解读。采用Excel 2016对文献的年度发表情况进行统计分析。
结" 果
一、文献检索结果
共检索到中文文献544篇,英文文献1697篇,通过阅读标题、摘要及正文等进行筛选,最终纳入中文文献323篇,英文文献880篇。中英文文献筛选流程见图1。
二、发文量分析
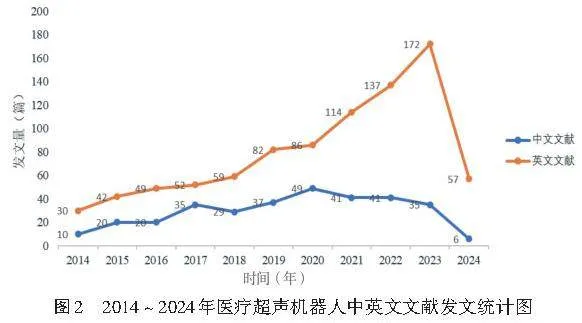
2014~2024年英文文献发文量总体呈逐年增长趋势;中文文献发文量整体可大致分为2个阶段,2014~2020年呈小幅度增长,2020年达到峰值,而后发文情况相对零散。见图2。
英文文献中发文量前3名的作者分别为Navab(22篇)、Wang(15篇)、Rhode (14篇);发文量前3名的机构分别为Johns Hopkins University(58篇)、Chinese Academy of Sciences(40篇)、Centre national de la Recherche Scientifique(28篇)。中文文献中发文量前3名的作者分别为吕发勤(7篇)、朱鹏(4篇)、张必翔(4篇);发文量前3名的机构分别为哈尔滨工业大学(17篇)、华南理工大学(11篇)、天津大学(11篇)。Web of Science核心数据库分析显示,发文量前3名的国家分别为美国(292篇,中心度0.55)、中国(273篇,中心度0.24)、德国(103篇,中心度0.16),中心度数值越大,代表其合作越密切。
三、关键词分析
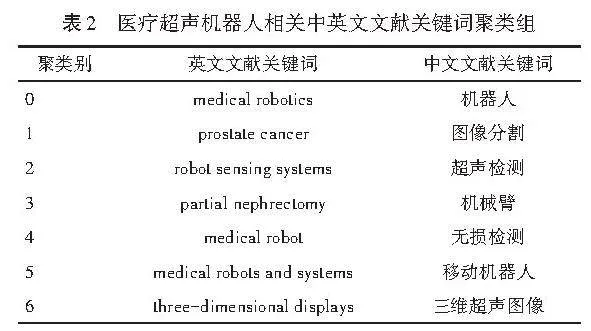
1.高频关键词:纳入文献关键词的出现频次一定程度上反映了该领域的研究热点。本研究纳入的医疗超声机器人相关中英文文献中,排名前15名的高频关键词具有一定相似性,主要集中在 “癌症患者的手术领域”。结合医疗超声机器人高频关键词检索频次,“肾肿瘤”在中文文献中呈现一定热度。见表1。
2.关键词突现:关键词突现可发现某一关键词的衰落或兴起,进而预测该领域内的研究热点和发展趋势。本研究对中英文文献关于医疗超声机器人研究领域突现度排名前25名的关键词进行统计,结果显示国内外研究多集中于超声检测、引导、三维立体成像及外科手术应用等方面。见图3,4。
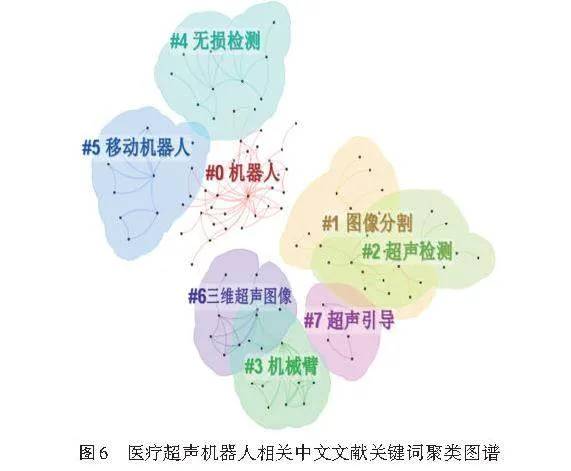
3.关键词聚类:基于中英文文献关键词共现图谱进行关键词聚类分析(图5,6),结果显示英文文献关键词聚类Q值为0.3854,S值为0.7584;中文文献关键词聚类Q值为0.7835,S值为0.9555,提示两者的聚类结果有效。英文文献多聚焦于前列腺癌、肾部分切除术等治疗领域,中文文献多倾向于超声检测、三维超声图像等方面。见表2。
4.关键词突现分析:关键词在相关领域出现的剧增,可反映该阶段的热点研究领域和趋势。本研究对中英文文献的关键词进行分析,结果显示英文文献的研究主要分为医疗超声机器人辅助放射治疗(主要研究部位前列腺)、CT扫描技术相结合、三维超声重建3个部分;中文文献的研究主要分为应用微创手术、人工智能相结合、远程超声技术的普及3个部分。见图7,8。
讨" 论
一、国内外医疗超声机器人的研究现状
本研究应用CiteSpace软件系统分析近10年关于医疗超声机器人的中英文文献,结果显示其发文量整体呈缓慢增长趋势,但中文文献发文量增长幅度均低于英文文献。2020年后中文文献发文量略有下降,可能与当前医疗超声机器人技术日趋成熟,缺乏新的研究方向所致,表明国内研究者对该领域的关注点与国外有所不同,提示国内学者应重点关注医疗超声机器人领域的新兴研究热点。此外,就发文机构而言,英文文献的发文机构多为学校,注重多学科的联合、跨部门、跨单位的合作研究;而中文文献的发文机构虽亦为学术机构,但以工科大学为主,研究内容相对局限,尚未形成有规模的跨区域、跨学科研究团队。分析其原因可能为机器人应用医疗领域的研究成本较高,且后期仍需定时检查、维修等,这亦是医疗超声机器人尚未广泛应用,仅出现于部分大型医院的重要原因。尤其在偏远落后的基层医院,由于人力资源结构欠合理,导致医保待遇、医疗服务可及性等方面存在局限[6],进一步导致超声技术在机器人领域的应用受限。与发达国家相比,我国学科交叉发展尚处于起步阶段,实施医疗超声机器人的技术尚未完善,导致临床疗效不够理想。此外,从患者角度考虑,应用机器人的安全性、患者个人隐私保护亦存在一定争议[7]。未来可开展跨领域、多学科、交流合作,发挥各大高校和教学医院在科研与技术创新方面的引领作用,实现优势互补,为医疗超声机器人领域发展的长远布局保驾护航。
二、国内外医疗超声机器人的研究热点
1.医疗超声机器人手术干预
医疗手术机器人在2014~2019年得到了广泛的临床实践,且国外的机器人手术技术较国内发展更早、更成熟。早在1985年,南加州大学首次将工业机器人应用于神经外科手术中,开发了基于CT引导的脑部手术定位机器人系统[8],结果显示机器人无论是速度或精度均较医师操作更精准。目前,临床中应用最广泛的手术机器人是美国研发的达芬奇手术机器人,其包括了控制系统、机械臂手术系统及实时高清三维成像系统,可同步模仿操作医师的动作,自动滤除震颤,较人工操作更为精准稳定。截至2024年1月,全球已有超过775 000例患者接受达芬奇手术机器人治疗[9],且该数量不断增长。达芬奇手术机器人的成功应用表明了医疗机器人系统在解决临床难题、提升诊疗效率方面具有重要作用。我国机器人手术起步较晚,受地域文化、资源投入及传统思想的制约,自2006年才引进达芬奇手术机器人并完成了首例机器人微创心脏手术[10],且其在国内的发展出现了较多障碍,如操作难度较大,主刀医师必须经过系统培训且考核合格后方可上台操作,加之设备费用高昂,基层医院难以普及[11-12]。目前该技术服务的主体人群多为成人肿瘤患者,较少应用于儿童患者,这亦为我国未来医疗超声机器人手术干预相关研究方向开拓了新思路。
2.医疗超声机器人放射治疗
放射治疗的目的主要为在保证机体健康的同时,对肿瘤细胞采用精准的剂量进行辐射治疗[13]。然而放射治疗疾病时,产生的辐射亦不可小觑。因患者机体处于辐射状态,医师无法长时间手持探头,而医疗超声机器人无需担心辐射的影响,同时亦能较为精准地提供软组织对比度,在对放射治疗的持续监测方面具有巨大的应用潜力。研究[14] 发现由医师和机器人共同协作的超声机器人系统采用软虚拟固定装置,不仅可有效指导医师精准地放置超声探头,同时亦可在放射治疗期间进行实时监测。Seitz等[15]将超声机器人的控制与图像处理功能集成一个软件平台,进而引导呼吸、运动控制系统,结果显示医疗超声机器人应用于放射治疗具有可行性。Bednarz等[16]研究亦证实了医疗超声机器人引导放射治疗安全、可靠。虽然医疗超声机器人在放射治疗中的应用价值显著,但其操控技术仍有待进一步提升,目前机器人辅助治疗仍以单个部位为主,较少涉及全身放射治疗且对放置部位的选择仍是一大难点,放置部位过高或过低均会影响治疗效果。
3.医疗超声机器人远程操控
由医疗超声机器人相关中英文文献的关键词聚类和关键词突现图谱可以得知,“远程超声”是其研究的热点。远程超声成像主要是医师在不接触患者的情况下,通过遥控机器人完成相应的超声检查。目前国内外均已研发出可用于临床医用远程遥控操作的超声机器人系统。2009年Koizumi等[17]应用通信网络定位主机械手和从机械手,实现了超声探头的平滑和精确运动。Ye等[18]通过基于5G的机器人辅助远程超声系统对23例新型冠状病毒肺炎患者进行了肺部和心脏超声检查,结果显示远程超声系统不仅安全、成功地对所有患者完成了检查,同时还可靠地评估了病情严重程度。许幼峰和毛锋[19]通过对412例基层医院同步远程超声会诊病例进行分析,结果显示81.1%的患者在15 min内完成会诊,且后期总结发现远程超声会诊不仅可提高诊断效率和质量,还能一定程度上提升基层医师的诊断水平。王丹等[20]对超声人工智能系统联合远程医疗的临床价值进行探讨,通过对612例患者进行分析发现将人工智能系统与远程医疗相结合,不仅使基层医院误诊、漏诊率大大降低,亦为患者提供了更好的就医体验。虽然近年来国内外医疗超声机器人远程超声这一新兴医疗图像诊断技术在临床逐步普及,但过多的远程超声在一定程度上增大了上级医院医师额外的工作内容,且基层医院的仪器、设备相对匮乏落后,亦在一定程度上对远程超声技术的开展造成了一定的阻碍,故对于远程超声的应用推广仍需进一步探索。
4.医疗超声机器人自主检测
自主超声检测相较人机协作超声检测更加智能,机器人可依据事先设定的程序自主完成检测。Mustafa等[21]研发的自主超声机器人可通过网络摄像机对患者腹部区域进行标记及定位,机械臂依据事先设定的程序模拟医师手法进行扫描,有效实现了对肝脏等区域的自主检测。Virga等[22]提出了通过评估患者血管直径筛查腹主动脉瘤的自主超声检测系统,该系统通过将机械臂操作与MRI相结合,实现了路径规划与自主超声检测。Nakadate等[23]开发了用于颈动脉的自主超声检测系统,其基于实时图像反馈自主调整探头位置,进而获取清晰的颈动脉纵切面超声图像。朱海煜[24]基于二维超声图像研发了可实时识别的膀胱B型超声自动扫描系统。秦浩[25]亦利用图像分割技术开发了可自主扫描及三维成像的机器人系统。虽然现阶段的医疗超声机器人在一定程度上实现了自主检测,但其自主性大多体现在开始执行检测之后,而检测之前的工作仍需人工辅助完成,其自主性仍有待进一步提升。
三、国内外医疗超声机器人的发展趋势
根据关键词分析结果可知,近年来医疗超声机器人相关中英文献的研究对象均以癌症患者为主。作为医学影像领域的重要辅助手段,医疗超声机器人在缓解医疗资源短缺、快速传递数据中起到举足轻重的作用,其不仅涉及手术干预、远程诊断,同时亦涉及自主扫描及三维成像。然而医疗超声机器人对资金、技术、人才等方面要求均较高,尚未进入系统产业链发展阶段,且缺乏充分的临床验证、安全系数待定等问题,如何从模拟试验到真人真做再到临床应用是目前研究必须关注的问题。
四、本研究的局限性
检索时间从2014年开始,对于医疗超声机器人相关基础研究可能存在遗漏;此外,本研究检索数据库来源有限,仅检索了中国知网、Web of Science核心合集两个数据库,未来可多元化检索各数据库,从而对医疗超声机器人相关研究进行全面梳理。
综上所述,本研究采用 CiteSpace软件系统梳理了国内外医疗超声机器人的研究现状及热点问题,对比国外研究,我国医疗超声机器人研究人群相对局限,研究主题有待拓展。未来可进一步在微创化、精准化、远程化及智能化等方面开展多中心、大样本、高质量的研究进行深入探讨及交流,推动医疗超声机器人相关领域快速发展。
参考文献
[1] Fong X,Nataraian S,Culjat MO.Robotic ultrasound systems in medicine[J].IEEE Trans Ultrason Ferroelectr Freq Control,2013,60(3):507-523.
[2] Yamada A,Tokuda J,Naka S,et al.Magnetic resonance and ultrasound image-guided navigation system using a needle manipulator[J].Med Phys,2020,47(3):850-858.
[3] Scorza A,Conforto S,D’Anna C,et al.A comparative study on the influence of probe placement on quality assurance measurements in B-mode ultrasound by means of ultrasound phantoms[J].Open Biomed Eng J,2015,9:164-178.
[4] 陈骊珠,黄瑛,任卫东.辽宁省超声医学质量控制基线调查情况及现状分析[J].中华医学超声杂志(电子版),2021,18(7):5.
[5] Dhyani M,Roll SC,Gilbertson MW,et al.A pilot study to precisely quantify forces applied by sonographers while scanning:a step toward reducing ergonomic injury[J].Work,2017,58(2):241-247.
[6] 岳希明,吴宇涵.我国基本医疗保险制度对居民收入分配的影响[J].中国卫生政策研究,2024,17(12):59-67.
[7] 刘佳琳,李聪,张学涛.参与城乡居民基本医疗保险对贫困脆弱性影响研究[J].青岛大学学报(自然科学版),2023,36(3):117-123.
[8] Gold E,Stapley S,Goulding A.Robotische Chirurgie-operiert der Roboter?[J].Laryngo-Rhino-Otologie,2018,97(1):231-278.
[9] Friedrich DT,Scheithauer MO,Greve J,et al.Recent advances in robot-assisted head and neck surgery[J].Int J Med Robot,2017,13(2).DOI:10.1002/rcs.1744.
[10] 田红,杨梓含,李颖,等.达芬奇机器人手术器械清洗消毒灭菌研究现状及展望[J].中国感染控制杂志,2023,22(4):484-488.
[11] 田宇航,朱晓明.达芬奇机器人辅助下巨大子宫切除的研究进展[J].机器人外科学杂志(中英文),2021,2(2):128-132.
[12] Akazawa M,Lee SL,Liu WM.Impact of uterine weight on robotic hysterectomy:analysis of 500 cases in a single institute[J].Int J Med Robot,2019,15(5):e2026.
[13] Odéen H,Parker DL.Magnetic resonance thermometry and its biological applications——physical principles and practical considerations[J].Prog Nucl Magn Reson Spectrosc,2019,110:34-61.
[14] Şen HT,Lediju Bell MA,Zhang Y,et al.System integration and preliminary in-vivo experiments of a robot for ultrasound guidance and monitoring during radiotherapy[J].Proc Int Conf Adv Robot,2015:53-59.
[15] Seitz PK,Baumann B,Johnen W,et al.Development of a robot assisted ultrasound-guided radiation therapy(USgRT)[J].Int J Comput Ass Rad,2020,15(3):491-501.
[16] Bednarz BP,Jupitz S,Lee W,et al.First-in-human imaging using a MR-compatible e4D ultrasound probe for motion management of radiotherapy[J].Phys Med,2021,88:104-110.
[17] Koizumi N,Warisawas S,Nagoshim M,et al.Construction methodology for a remote ultrasound diagnostic system[J].IEEE Transact Robot,2009,25(3):522-538.
[18] Ye R,Zhou X,Shao F,et al.Feasibility of a 5G-based robot-assisted remote ultrasound system for cardiopulmonary assessment of patients with coronavirus disease 2019[J].Chest,2021,159(1):270-281.
[19] 许幼峰,毛锋.同步远程超声会诊在基层医院超声检查和诊断中的应用[J].中国乡村医药,2020,27(5) :57-58.
[20] 王丹,李程,孙静改,等.超声人工智能诊断系统联合远程医疗的临床价值探讨[J].中国超声医学杂志,2021,37(7) :765-766.
[21] Mustafa Asb,Ishii T,Matsunaga Y,et al.Development of robotic system for autonomous liver screening using ultrasound scanning device[C].2013 IEEE International Conference on Robotics and Biomimetics(ROBIO).IEEE,2013:804-809.
[22] Virga S,Zettinig O,Esposito M,et al.Automatic force-compliant robotic ultrasound screening of abdominal aortic aneurysms[J].IEEE,2016,DOI:10.1109/IROS.2016.7759101.
[23] Nakadate R,Solis J,Takanishi A,et al.Implementation of an automatic scanning and detection algorithm for the carotid artery by an assisted-robotic measurement system[C].2010 IEEE/RSJ International Conference on Intelligent Robotics and Systems(IROS).IEEE,2010:313-318.
[24] 朱海煜.基于二维图像实时识别的膀胱B型超声自动扫描系统研制[D].上海:上海交通大学,2019.
[25] 秦浩.全自动机器人超声自主扫描及三维成像系统研究[D].深圳:深圳大学,2020.
(收稿日期:2024-06-17)
作者单位:1.中南大学湘雅二医院临床护理教研室,湖南 长沙 410011;2.长沙市三医院临床护理教研室,湖南 长沙 410035
通讯作者:尤守超,Email:1169454787@qq.com
猜你喜欢
现代养生·下半月(2016年5期)2017-01-09 11:22:36
中国当代医药(2016年30期)2017-01-07 13:01:03
职教论坛(2016年26期)2017-01-06 19:04:59
科技传播(2016年19期)2016-12-27 16:18:28
现代情报(2016年11期)2016-12-21 23:40:14
现代情报(2016年10期)2016-12-15 12:27:57
风湿病与关节炎(2016年10期)2016-11-23 07:20:00
中国实用医药(2016年26期)2016-11-07 23:42:20
中国实用医药(2016年14期)2016-05-20 14:21:18
中国实用医药(2016年6期)2016-03-17 14:20:43
