基于A*算法的AGV路径规划研究文献综述
2025-02-09 00:00:00宋作玲殷祥栋
物流科技 2025年3期
关键词:路径规划
摘" 要:随着科技的不断进步,自动导引车辆(AGV)在仓库、港口等物流领域的应用愈加广泛。文章针对近年来A*算法的AGV研究现状、算法改进,以及在仓库或港口环境下多AGV的研究现状做出整理与总结。文章分析了A*算法的排序过程和时间因子的改进,结合交通规则和预约表的A*算法以及动态加权地图方法解决AGV车辆工作时路径冲突与堵塞问题。接着,阐述了在仓库、港口环境下多AGV的研究现状,通过匹配AGV与货物托盘、改进遗传算法、设置权值减少转弯次数等方法提高路径规划效率和车辆运行效率。最后,总结了研究成果和应用价值,并指出了未来研究方向。
关键词:寻路算法;路径规划;自动引导车
" 中图分类号:TP23" " 文献标志码:A" " DOI:10.13714/j.cnki.1002-3100.2025.03.009
Abstract: With the continuous progress of science and technology, automatic guided vehicles(AGV)in warehouses, ports and other logistics fields are increasingly widely used. This paper reviews the current research status of AGV with A* algorithm, algorithm improvement, and multi-AGVs in warehouse and port environment in recent years to make a collation and summary. The article analyzes the sorting process of A* algorithm and the improvement of time factor, and then summarizes the methods of solving the problems of path conflict and traffic congestion when multi-AGVs work, such as A* algorithm combined with traffic rules and reservation table and dynamic weighted map method. Next, the paper describes the current research status of multi-AGVs in warehouse and port environments, including methods to improve path planning efficiency and vehicle operation efficiency by matching AGVs with cargo pallets, improving genetic algorithms, and setting weights to reduce the number of turns. Finally, the article summaries the research results and application value, and points out the future research direction.
Key words: path-finding algorithm; path planning; automated guided vehicle
1" 针对A*算法的AGV研究现状
随着科技的不断进步,自动导引车辆(AGV)在仓库、港口等物流领域的应用愈加广泛。基于A*算法的AGV路径规划与协调调度等成为学术和应用研究热点。
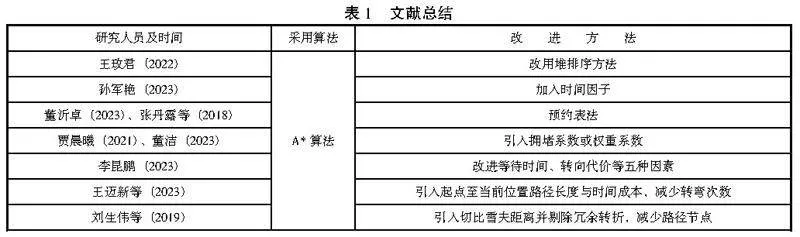
" 王玫君[1]通过改变A*算法中的排序过程,即将堆排序与A*算法相结合,在确保路径规划结果不变的情况下加快寻路速度约26.5%。
" 孙军艳等[2]通过在在一般的A*算法中加入时间因子,提出了改进A*算法。相对原始A*算法,改进后算法路径规划总用时减少了10.0%,总路径长度缩短了7.1%。同时以AGV电池电量为约束避免车辆发生节点冲突。
" 董沂卓[3]通过预约表法记录车辆在地图上的位置并为各AGV分配相应权重,避免车辆发生路径冲突。仿真实验证明A*算法与预约表法相结合后,车辆寻路效率显著提升。张丹露等[4]结合交通规则和预约表的A*算法并提出动态加权地图方法,解决了多AGV车辆工作时路径冲突与交通堵塞问题。经验证,机器人总走行路程相对原A*算法虽有所增加,但走行过程中总用时大幅减少且随机器人数量增加用时呈线性增长趋势,证实了算法具有较强的稳定性。
" 贾晨曦[5]通过拥堵系数影响距离权重,从而对A*算法进行改进;并用时间窗算法和重新规划路径方法解决多AGV静态路径规划问题并动态监督路径冲突情况。董浩[6]通过在A*算法中引入权重系数并结合双向A*算法进行改进。经验证得改进后算法相对传统A*算法寻路速度缩短近50%,效率大幅提升。
" 李昆鹏等[7]通过分别考虑等待时间、转向代价、重调度效率惩罚、停靠区及货架栅格回避系数及强化方向因子等改进方法对A*算法进行改进。实验证实,改进后的A*算法相对原始A*算法平均改善27.69%、算法效率提升130.01%,且随着算例规模增大,改善愈发明显。
" 王迈新等[8]通过向代价函数中引入AGV从起点至当前位置路径长度与时间成本,解决了转弯次数多的问题;采用使路径经过障碍物顶点的子节点的方式进行避障;利用45°圆弧和90°圆弧代替折线转弯使路径更加平滑。实验证实,改进后的A*算法相对传统A*算法规划路径距离缩短2.54%,转弯次数减少60%,满足实际需求。
" 刘生伟等[9]通过在A*算法中引入切比雪夫距离得到基本路径,再通过剔除冗余转折点方式得到最终路径。实验结果表明,与传统A*算法相比,搜索路径耗费时间、路径长度、路径节点数分别减少了59.79%、2.57%和99.21%。在实际应用中有着较高的效率。文献总结如表1所示。
2" 在仓库或港口环境下多AGV研究现状
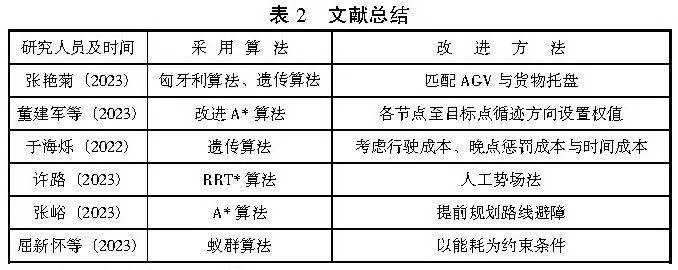
" 张艳菊等[10]通过匈牙利算法匹配AGV与货物托盘,从整体上均衡利用仓库资源,避免AGV车辆与货物数目不匹配的情况,然后将改进的遗传算法与基于三维网格的AGV冲突检测算法融合。实验表明,改进后的算法相较于原始遗传算法寻路速度提升了40.35%。
" 董建军等[11]以港口为模拟场景,通过改进A*算法,即在各节点至目标点循迹方向上设置权值,明显减少了路径规划中的转弯次数,提高车辆运行效率。
" 于海烁[12]以AGV行驶成本、AGV晚于岸桥到达产生的惩罚成本和AGV等待成本为优化目标,建立了自动化集装箱码头岸桥与AGV协同作业模型,通过鲁棒优化方法与遗传算法进行模型求解并以我国某地港口为背景进行模拟验证,证明此模型可显著降低AGV车辆充电时间,提高作业效率,减少岸桥与AGV车辆的等待时间。并且基于本文背景选取了最合理的AGV数量,将成本值控制在合理水平。
" 许路[13]在智能仓储环境下针对RRT*算法遍历节点数较多的问题使用人工势场法进行改进,即目标点给AGV引力,障碍物对AGV产生斥力,使AGV能快速的朝着目标点行驶。在简单环境下改进后算法相对原始RRT*算法在采样节点数量、路径长度、寻路时间方面分别减少了54%、34%、57%;复杂环境下则为70%、25%、55%。
" 张峪[14]在智能仓库背景下采用原始A*算法进行路线规划,避障方面未采用A*算法的避障策略,而是通过提前规划路线避开障碍规避碰撞,若有突发情况造成路线改变的,则通过将路线分成多个小段的方式进行重新规划。经多次试验后得出,此种避障方式相较于传统A*算法避障次数减少了90%以上,节省避障时间96.4%。大大提升了AGV车辆的作业效率。
" 屈新怀等[15]通过引入能耗作为约束条件,与蚁群算法相结合形成混合算法,经模拟验证,混合算法迭代次数与路径长度均优于蚁群算法,有效提高自动化分拣仓库作业效率并降低AGV车辆能耗。文献总结如表2所示。
3" 文献述评
尽管不同作者所采用的算法改进方法各不相同,但目标均为提高车辆作业效率。
" 在AGV的寻路效率方面,有研究者通过改变A*算法中的排序过程、加入时间因子,或者结合预约表法、考虑交通规则,甚至使用动态加权地图等方法,来达到提高效率的目的。
在仓库、港口环境下多AGV的研究中,研究者们通过匹配AGV与货物托盘,或改进遗传算法与基于三维网格的AGV冲突检测算法融合等,提高车辆运行、作业效率。
" 此外,通过人工势场法改进RRT* 算法,可以进一步减少采样节点数量、路径长度和寻路时间。在智能仓库背景下,采用原始A*算法进行路线规划,并通过提前规划路线避开障碍规避碰撞,可以减少避障次数和节省避障时间。这些方法在实际应用中都表现出了较高的效率。
总的来说,这些改进的算法和方法在实际应用中具有广泛的应用前景,可以为智能交通系统、智能仓库等领域的自动化和智能化提供有力的支持。
参考文献:
[1] 王玫君. 包装车间仓储式多AGV调度系统设计与实现[D]. 哈尔滨:哈尔滨工业大学,2022.
[2] 孙军艳,吴焕钦,王子豪. 基于改进A*算法的多AGV路径规划及避障研究[J]. 西安理工大学学报,2024,40(2):242-252.
[3] 董沂卓. 基于储位布局的仓储AGV路径优化研究[D]. 徐州:中国矿业大学,2023.
[4] 张丹露,孙小勇,傅顺,等. 智能仓库中的多机器人协同路径规划方法[J]. 计算机集成制造系统,2018,24(2):410-418.
[5] 贾晨曦. AGV的路径规划与调度在智能制造中的研究与应用[D]. 成都:电子科技大学,2022.
[6] 董浩. 多AGV路径规划与任务调度研究[D]. 杭州:杭州电子科技大学,2023.
[7] 李昆鹏,韩雪芳. 智能仓库中多AGV在线任务指派与全局路径规划问题研究[J/OL]. 中国管理科学,1-14(2023-06-27)[2024-12-30]. https://doi.org/10.16381/j.cnki.issn1003-207x.2023.0429.
[8] 王迈新,闫莉,李雨菲. 基于改进A*算法的车间AGV路径规划[J]. 自动化与仪表,2023,38(11):45-49,59.
[9] 刘生伟,马钺,孟树峰,等. 改进A*算法的AGV路径规划[J]. 计算机应用,2019,39(S2):41-44.
[10] 张艳菊,吴俊,程锦倩,等. 多搬运任务下考虑碰撞避免的AGV路径规划[J]. 计算机应用研究,2024,41(5):1462-1469.
[11] 董建军,许新来,陈昱丞,等. 一种港口AGV运输交通路径规划仿真方法[J]. 港口装卸,2023(5):38-42.
[12] 于海烁. 与岸桥作业协同的自动化集装箱码头AGV调度问题研究[D]. 北京:北京交通大学,2023.
[13] 许路. 智能仓储环境下AGV路径规划研究[D]. 北京:北京印刷学院,2023.
[14] 张峪. 基于改进离散型粒子群算法与A*算法结合的多AGV智能仓库优化问题[D]. 长春:长春工业大学,2023.
[15] 屈新怀,严飞,丁必荣,等. 基于混合算法的自动导引车调度问题研究[J]. 合肥工业大学学报(自然科学版),2023,46(6):732-737.
收稿日期:2024-03-01
基金项目:2023年国家级大学生创新创业计划训练项目“多AGV路径规划与协同调度研究”(G202111040527)
作者简介:宋作玲(1983—),女,山东青岛人,山东科技大学交通学院,副教授,研究方向:物流系统规划、供应链管理。
引文格式:宋作玲,殷祥栋. 基于A*算法的AGV路径规划研究文献综述[J]. 物流科技,2025,48(3):41-43.
猜你喜欢
物联网技术(2016年12期)2017-01-21 21:28:10
中国新通信(2016年22期)2017-01-13 09:15:21
电脑知识与技术(2016年28期)2016-12-21 13:11:43
电子技术与软件工程(2016年20期)2016-12-21 10:52:33
科技视界(2016年26期)2016-12-17 15:53:57
电脑知识与技术(2016年26期)2016-11-25 00:00:00
科技视界(2016年20期)2016-09-29 12:00:43
电脑知识与技术(2016年17期)2016-07-23 20:25:51
电脑知识与技术(2016年13期)2016-06-29 20:13:01
中国科技博览(2016年3期)2016-04-25 17:11:10