
基于ANYBODY 骑行仿真的康复训练装置设计
2024-12-31 00:00:00李旭王旭鹏赵嘉鑫
设计 2024年23期


摘要:由于传统骑行训练装置运动轨迹极限值偏低,导致下肢康复训练效果不足,为了满足膝关节术后患者康复训练需求,提出一种能实现类三角形运动轨迹特点的可变曲柄下肢骑行训练装置,满足用户康复训练需求。通过分析用户人群特征与需求,发现市场缺口与不同用户群体痛点,明确设计目标,结合人体下肢生理结构与运动特性,在Anybody环境下模拟得到相关肌群激活程度,进而分析不同曲柄参数条件下骑行运动的关节角(Pos)、关节角速度(Vel)以及肌肉激活程度(Activity)变化,得出装置骑行训练活动范围等关键参数,依据鲁棒模型完成数学模型建立与计算,为装置设计提供理论支撑。本文所提出的能实现类三角形运动轨迹的可变曲柄下肢骑行训练装置,通过肌电实验得出其较类圆形运动轨迹的装置而言,能使下肢主要肌群肌肉激活程度提高。从功能与结构入手,运用逆动力学分析与肌电实验对比分析,系统地提出了人体康复训练装置的设计思路、方法及流程,有助于完善康复训练装置体系,增强康复训练效能,为同类型康复训练装置的设计、仿真及性能验证提供参考。
关键词:AnyBody;骑行训练装置;可变曲柄;sEMG;辅助康复
中图分类号:TB472 文献标识码:A
文章编号:1003-0069(2024)23-0075-05
引言
膝关节骨性关节炎(KOA, Knee osteoarthritis)是一种复杂的退行性关节病,会导致膝关节周围肌力显著衰退、下肢协调性降低,给患者日常生活带来了严重影响。据统计我国40 岁以上人群KOA 患病率已高达21.51%[1],KOA 病情发展具有不可逆性,晚期时需要进行重建性治疗以及开展针对性康复训练才能使患者下肢功能恢复[2],当前康复辅具可以有效替代医师完成部分康复治疗训练内容,从而有效减轻医护人员负担,并且康复辅具拥有成本低、效果评估客观的优势,在此背景下康复辅具研究发展迅速,目前已经成为下肢康复训练的重要形式之一[3]。但传统康复辅具种类单一、使用不便、使用成本较高[4],大多需要患者到专业医疗中心进行康复训练,会对患者造成较大的心理与经济负担[5]。针对现有痛点,本文将在人体运动生物力学研究基础上,将仿真模拟与肌电实验相结合,转化用户需求为设计要点,进行装置设计,并通过可行性实验验证,完成主客观设计评价。
一、市场调研与需求分析
(一)使用环境划分
根据使用环境可以将康复训练装置划分为家庭康复、医疗设施康复与老年护理康复3 种类别。得益于互联网+ 医疗模式的推广,通过远程康复指导和在线监测,越来越多的患者在家中也能完成康复训练,便携、易操作的家庭康复训练装置逐渐受到市场青睐;医院和康复中心依然是康复训练装置的主要使用场景,这些机构对康复设备的功能性、稳定性和效果有着更高的要求,需要更加高精尖与针对性的康复训练装置;作为老年人康复的重要场所,老年护理机构对于下肢康复训练装置的需求不断增加,许多养老院和护理中心正在配备专业的康复设备,以提升服务水平。老年护理机构对于康复设备的需求特点是操作简便、安全可靠、适合老年人使用。
(二)市场环境分析
国际知名品牌如强生、飞利浦、GE 医疗、西门子等,一直在中国市场占据着较多市场份额,这些企业凭借先进的技术和品牌影响力,赢得了不少高端用户的青睐。近些年,国内市场上也涌现出了一批优秀的康复训练设备制造企业,如迈瑞医疗、鱼跃医疗、新华医疗等,这些企业通过不断的技术创新和产品优化,逐渐提高了市场竞争力。通过市场调研,对国内市场排名较前的医疗设备制造公司及其主要研发方向进行整理,见表1。 可以发现国内市场相关医疗产业发展更倾向于医学治疗及器械耗材方面,康复训练装置的研发则较少被行业巨头们所重视,侧面反映了我国市场对于康复装置需求量大,市场前景广阔。
(三)用户需求分析
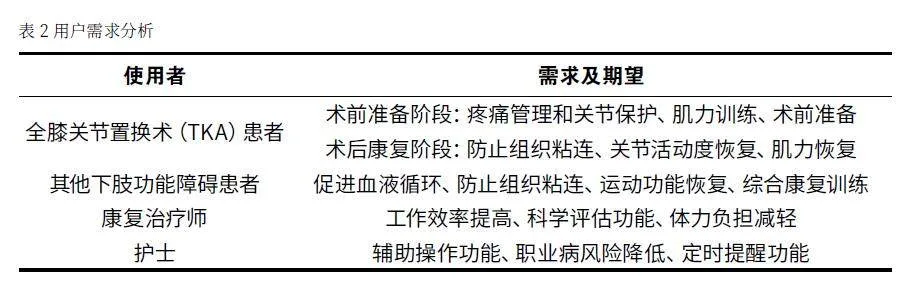
出于使用者不同需求,可将下肢康复训练装置的使用人群进行分类,从各自角度分析其特征、需求以及对康复训练装置的期望,结果如表2。通过分析发现患者的主要需求围绕下肢关节活动度恢复以及肌力训练,需要装置能够快速有效地帮助其完成下肢康复训练内容。医护人员的主要需求则集中在操作便捷、评估提醒功能的添加方面,对装置的操作逻辑、界面设计以及软件系统要求较高。
通过市场调研与需求分析可以发现近些年来家庭康复市场发展迅速,但大型医疗器械公司相关研发与产品设计更多针对医院与康复中心,一定程度上忽视了家庭康复环境的使用需求,造成了市场空缺。需要设计一款针对家庭使用环境的下肢康复训练装置,其需满足患者对下肢关节活动度以及肌力恢复的需求,并且要考虑装置的成本与便捷性,减轻使用者经济与心理压力。
二、基于AnyBody的下肢生物力学仿真
康复训练装置设计过程中需要不断采集、应用人体运动生物力学相关参数,从而保障所设计装置的运行规律与尺寸参数符合人体结构,满足使用者对下肢关节的活动度以及肌力训练的需求,并且能够避免对人体造成二次伤害的可能性。现有康复训练装置的开发设计流程中包含着大量的实验样机制作与人体生理参数采集实验(如肌电信号采集实验与动作捕捉实验),需要经过不断地优化迭代后才能完成装置设计,并且在该过程中无法避免的会受到被试者样本差异的干扰,造成所采集数据的不匹配进而影响设计参数的计算。
仿真模拟在现有装置设计过程中应用广泛,相关软件开发、学习平台搭建已较为完善,对于使用者要求较低,可以较为快速地学习并使用仿真模拟软件进行产品设计相关参数的获取,使设计者无需全程应用肌电或者其他设备也可以完成较为科学合理的装置研发与设计,有效替代部分实物样机实验,降低康复训练装置设计的成本与门槛。人体参数采集实验需要肌电与动作捕捉系统配合,每组实验之间被试者状态、参数等都会影响实验结果,使用仿真模拟手段可以有效排除人体参数采集实验过程中的干扰项,更加简单直观地获得装置参数设置与人体运动相关规律。并且可以有效降低装置设计数据优化阶段的成本与时间,通过多次仿真模拟可以得到单一变量下的装置运行参数与人体反馈结果,对于装置研发效率将具有明显提升。
相较于传统装置设计开发流程而言,以仿真模拟为主的设计方法可以有效降低康复训练装置的设计难度与成本,将其与工业设计方法有机结合起来可以获得更加合理可靠的装置设计方案,从而解决现有问题。AnyBody 仿真软件(AnyBody v7.4,AnyBody TechnologyA/S,丹麦)能够模拟人体运动生物力学,提供详细的肌骨模型参数及分析结果,为下肢康复装置的设计提供有力支持。
(一)仿真模型建立
AnyBody 软件提供了丰富的模型库和驱动算法, 可以完成对人体常规运动的仿真与分析。在建模过程中, 混合使用AnyMuscleModel 模型与Hill 模型,确保数据输出的准确性,同时缩短仿真周期。仿真参数设置如表3 所示。
在AnyBdoy 软件环境下进行骑行仿真实验,需要调整骑行姿态人体模型位置角度使得其与骑行训练使用条件相近,建立骑行运动人体模型,进行模拟仿真。
(二)骑行运动仿真模拟
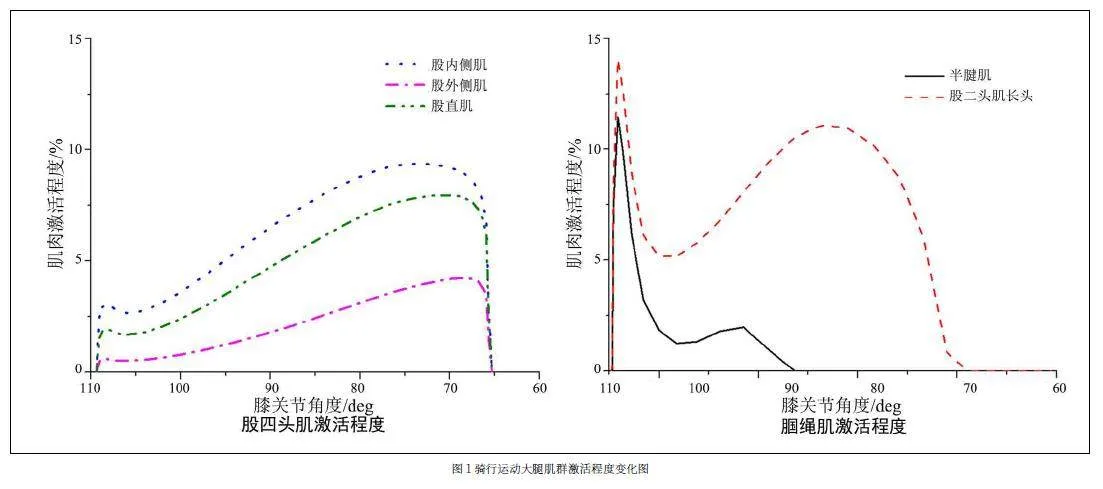
通过设置关节驱动函数,建立骑行运动仿真模型,进行参数化仿真试验,以不同曲柄长度(70mm、100mm、140mm、170mm)和曲柄转速(25r/min)进行仿真,导出膝关节角度、角速度及各肌肉激活程度数据,如图1。
由骑行运动仿真模拟可知:骨骼肌激活程度与膝关节角度存在强相关性,屈伸运动对下肢主要肌群(如股四头肌、腘绳肌)有显著刺激作用。通过将不同曲柄长度下各肌群的激活程度数据整合,得到动作时间与肌肉激活程度曲线图,如图2 所示。
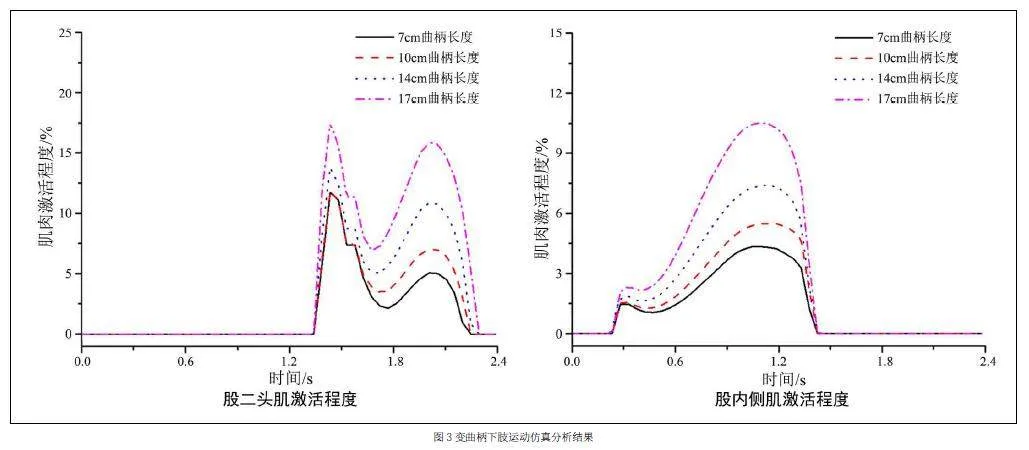
仿真结果显示,膝关节角度最大值出现在1.1s,角速度最大值与最小值分别出现在0.4s 与1.6s。膝关节角度最大值随曲柄长度增加而增加,角速度变化也随之呈现正相关。将肌肉激活程度数据进行整合处理后得到激活程度与时间关系变化曲线,如图3 所示。
不同曲柄长度下的仿真结果显示,曲柄长度越长,肌肉激活程度越高,以股二头肌和股内侧肌为例,激活程度在曲柄长度增加时显著提升。
研究结果表明:骑行运动中的膝关节屈伸运动对肌肉激活能力强,通过相应训练动作可以有效地激活下肢肌群;曲柄长度与股二头肌、股四头肌等肌群的激活程度关联度高,曲柄长度增加显著提高了肌肉激活程度。结合仿真模拟结果,可对最终设计目标进行展望:开发一种曲柄长度可自主调节、单电机驱动、实现类三角形运动轨迹的骑行康复训练装置。装置功能可被概括为3 点:(1)灵活性,能够根据患者具体需求调节曲柄长度,优化运动轨迹;(2)安全性,确保装置在使用过程中不会对患者造成新的伤害;(3)高效性,通过科学设计和优化,使装置能够有效激活下肢主要肌群,提升康复训练效果。
三、下肢骑行训练装置设计
为了更好地满足患者和医护人员的需求,提升康复效果,本文提出了一种基于骑行装置的下肢康复训练设备设计方案。选择骑行装置作为设计载体的理由如下:(1)结构简单,骑行装置的机械结构相对简单,便于制造和维护。(2)运行稳定,骑行装置在运行过程中能够提供平稳的运动轨迹,减少不必要的震动和冲击,有助于防止二次伤害。(3)接受程度较高,骑行运动是一种广泛接受的锻炼方式,患者对其有较高的接受度和依从性。(4)相关研究较多,骑行装置的相关软件和交互研究较为丰富,为后续的改良设计提供了充足的理论和实践支持。
(一)装置原理
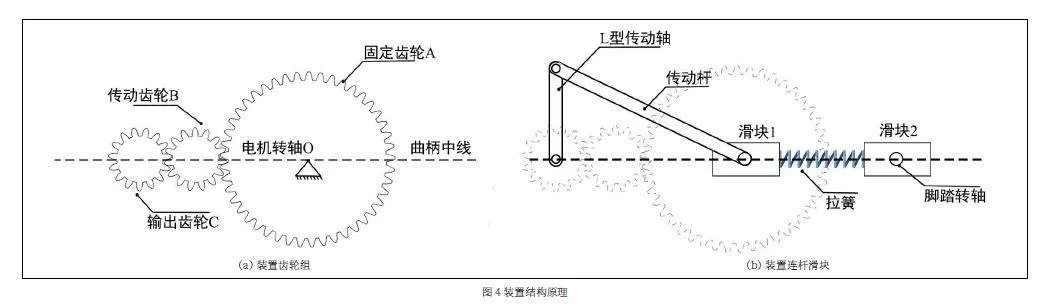
骨骼肌力的增强是康复训练的核心目标,因此设计需重点考虑如何通过运动装置有效激活和增强下肢肌力。前文提到的市场需求和用户需求分析表明,现有康复辅具在灵活性和个性化方面存在不足。因此,设计一种可调节的、基于骑行运动的康复装置,可以有效填补这一空白。具体装置设计方案为一种曲柄长度可自主调节、单电机驱动、实现类三角形运动轨迹的骑行康复训练装置。该装置能够在下肢运动可达域极限值范围内,通过改变曲柄长度来实现不同的运动轨迹。现有的曲柄长度调节机制包括滑动调节、齿轮组连杆机构、电动缸、气缸等。经过分析,选择齿轮连杆机构将曲柄长度与下肢姿态相关联,可以有效避免体积大和复杂控制功能的问题,装置结构原理如图4所示。
(二)人机尺寸
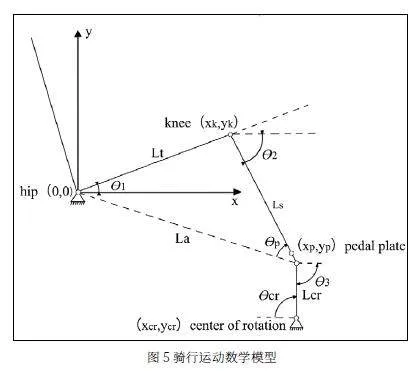
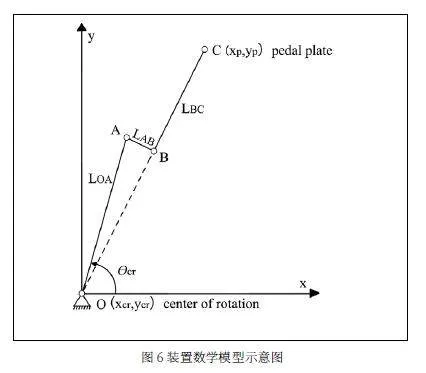
为确保装置运动规律符合人体下肢结构,使用者能够舒适有效地完成康复训练动作,将从功能角度出发进行装置参数计算,以人机工程学标准人体尺寸及运动范围作为基础进行尺寸参数的设计。依据鲁棒模型简化人体下肢结构,将下肢尺寸、关节角活动度等参数代入,建立骑行运动下肢数学模型,模拟康复训练动作进行推演,得出最适宜的装置尺寸参数,如图5、6 所示。
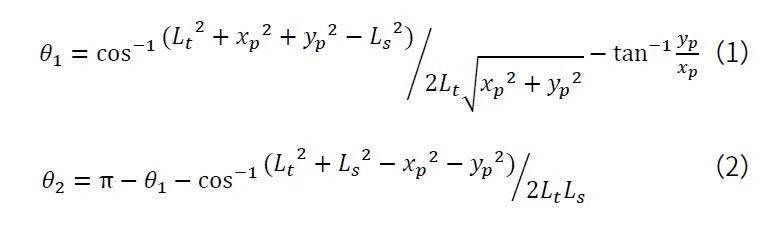
将骑行康复辅具曲柄长度与角度作为输入量,可以计算得出人体下肢各关节角度,从而确定人体下肢姿态。其中曲柄旋转中心坐标设为(xcr,ycr)、脚踏与人体连接位点坐标为(xp,yp)。
式中:
Lt——大腿长度/mm;Ls——小腿长度/mm;Lcr——曲柄长度/mm;θ1——大腿与水平面夹角/deg;θ2——小腿与水平面夹角/deg;θ3——曲柄与水平面夹角/deg。
通过AnyBody 仿真模拟数据及实验分析可知,康复训练过程中下肢运动范围与肌肉激活程度正相关,结合下肢运动数学模型合理推算,康复训练轨迹越接近下肢运动轨迹极限值,则肌肉激活程度越高,膝关节角活动范围也增大,从而满足肌力以及膝关节角度的康复训练需求。
曲柄实际长度为O 点到C 点距离,则曲柄总长Lcr 与θcr 之间的函数关系为:
式中:θcr——曲柄转动角度/deg。
(三)结构设计
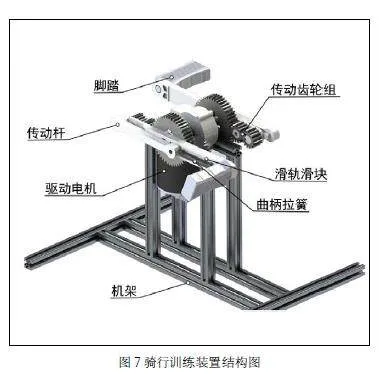
骑行训练装置由驱动电机、传动齿轮组、传动杆、滑轨滑块、拉簧、脚踏以及机架组成,如图7 所示。
下肢康复训练装置的设计需要满足改善关节活动度和增强肌肉力量的功能,协助患者进行康复训练。装置需确保不同下肢参数的患者均可安全、有效地进行训练,按照功能可将装置划分为支撑结构、传动结构、阻尼结构和驱动结构4 部分:支撑结构由机架组成,提供支撑和结构强度,确保耐用性和稳定性,支持患者进行骑行训练;装置传动机构由齿轮组与连杆组成,负责转换并维持运动的方向和速度,确保装置运行的平稳和有效性,传动机构可将单电机匀速转动转化为类三角形运动轨迹输出,从而满足下肢康复训练需求;在曲柄上设置拉簧作为阻尼机构,满足不同姿态下的阻抗训练需求,拉簧还能作为人体与装置之间缓冲,降低二次伤害的可能性;采用直流电机作为驱动机构,负责提供动力和控制运动,其控制简单、响应快,满足使用者对于转速调节与精确控制的使用需求。通过各结构协同工作,下肢康复训练装置能够为患者提供安全、有效的训练环境,助力康复过程。
四、实验验证
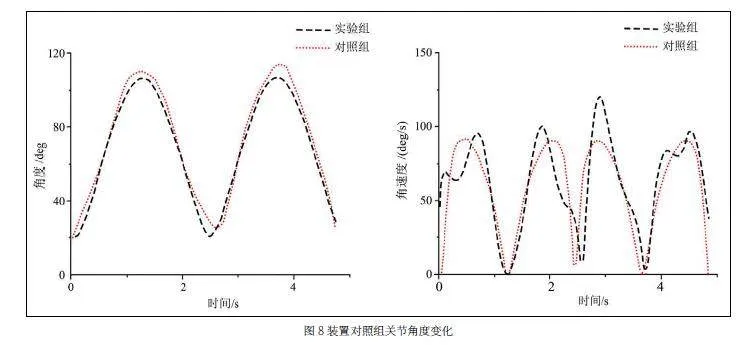
为了验证装置性能,将分别进行运动学仿真与实物验证对比分析。首先在SolidWorks 中将虚拟样机与人体简化模型匹配,能够得到下肢关节角度、角速度等参数,并进行对比分析,如图8。
将实验组和对照组关节角度与角速度变化数据进行对比分析后可知:膝关节角度变化曲线中实验组角度变化范围更广,主要变化范围发生在伸展运动时,实验组膝关节角运动范围提高了8.9%。通过对应膝关节角速度变化关系则可得知,实验组与对照组角速度变化曲线线形相近,幅值相仿,偏差处于合理范围内,证明该装置运行过程符合康复训练安全需求,不会对患者下肢造成二次伤害。
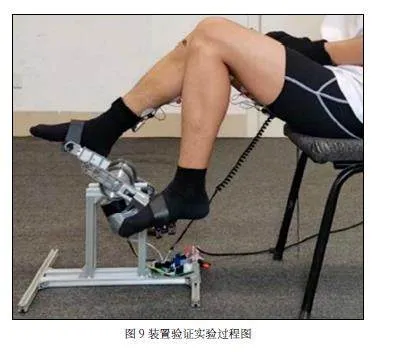
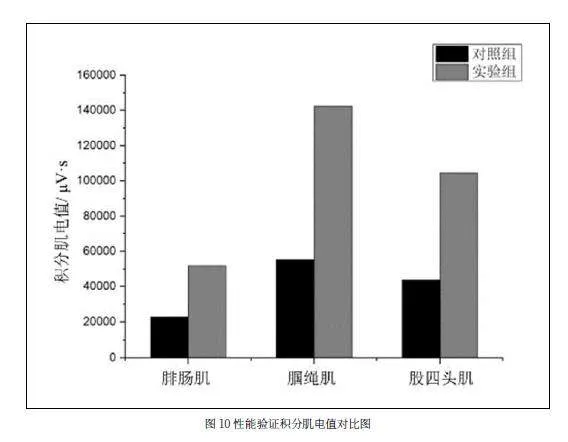
装置性能验证实验将使用对照组实验方式,以类三角形运动轨迹可变曲柄下肢康复辅具作为实验组、曲柄长度固定类圆运动轨迹的常规骑行康复辅具作为对照组,利用肌电系统分别采集两组被试者康复训练过程中下肢股四头肌、腘绳肌和腓肠肌激活程度,并进行数据对比分析,实验过程如图9、10 所示。
分析积分肌电值(IEMG)结果可知,实验组肌肉的IEMG 值明显大于对照组数据,并且相关肌群的肌电信号幅值、最大值、最小值等均比对照组肌电信号有着较大提升,可以证明装置在肌肉激活程度方面对于下肢主要肌群有着更明显作用,并且整个实验过程中所采集到的肌电信号波动规律,与装置运行周期契合。在实验过程中被试者均无下肢不适,实验装置的启停、反向以及调速等功能正常实现,以上结论可有效证明装置的可行性。
结论
在老龄化社会背景下,膝骨关节炎(KOA)等下肢功能障碍的患病率屡创新高,医疗从业人员需要应对不断增加的患者需求和医疗挑战。如何帮助这些医护人员减轻工作压力,已成为设计师们需要认真思考的问题。文章深入研究了TKA 术后患者的需求及康复装置的研发现状,提出了结合逆动力学仿真模拟的康复训练装置的设计思路与方法流程。针对传统康复装置种类单一、使用成本高的问题,通过迭代优化设计流程,设计了可变曲柄下肢骑行训练装置。这种装置不仅有助于减轻患者负担,还能提高康复训练效能,在相同训练周期内实现更高程度下肢肌群激活,从而满足主被动阶段转换时患者肌力康复训练需求。
基金项目:教育部青年基金(21XJC760003)、陕西省青年杰出人才支持计划配套基金(106-451420001)、装备预研共用技术和领域基金(106-418321001)
参考文献
[1]邵文娟,贾潇,蔡可书等.基于贝叶斯网络的膝骨关节炎患病风险定量预测研究[ J].北京体育大学学报,2024,47(03):124-132.
[2]冯晓晴,蔡道章,余星磊等.基于GBD大数据中国膝骨关节炎疾病负担现状与趋势分析[J].现代预防医学,2022,49(10):1753-1760.
[3]王萍,李芳宇,尹鑫渝.老年下肢康复辅具设计研究进展[J].设计,2020,33(05):134-136.
[4]白伊莎,杨涛,吴正仲.偏瘫康复训练交互系统设计研究[J].设计,2023,36(19):148-151.
[5]赵丹,曲延瑞.家用康复产品设计要素分析[J].设计,2019,32(20):98-100.
[6]刘元昆,尹宗生.单侧与同期双侧膝关节置换的安全性、经济性及成效性对比[ J].中国组织工程研究,2016,20(13):1829-1837.
[7]Jezernik, Sašo, et al. Robotic orthosis lokomat: A rehabilitation and research tool[J].Neuromodulation: Technology at the Neural Interface, 2003, 6(2): 108-115.
[8]Petre, Ioana, et al. Orthopaedic rehabilitation device actuated with pneumatic muscles[J].International Journal of Advanced Robotic Systems, 2014, 11(7): 105.
[9]Ottaviano, E., Cannella G, et al. A cable-based system for aiding elderly people in sit to standtransfer[J]. Mechanics based design of structures and machines, 2008, 36(4): 310-329.
[10]Perkins T A, Donaldson N N, Hatcher N A, et al. Control of Leg-Powered Paraplegic Cycling UsingStimulation of the Lumbo-Sacral Anterior Spinal Nerve Roots[J]. IEEE Transactions on Neural Systemsand Rehabilitation Engineering, 2002, 10(3): 158-164.
[11]Kakebeeke T H, Lechner H E, Knapp P A. The Effect of Passive Cycling Movements on SpasticityAfter Spinal Cord Injury [J]. Spinal Cord, 2005, 43: 483–488.
[12]Jiang, Dawei, Guoquan Shi, et al. Control of a new cycling rehabilitation robot based on fuzzy PID [J].Journal of Physics: Conference Series, 2020, 1622(1),2.
