露天矿无人驾驶自卸车横−纵向协同控制研究
2024-12-31 00:00:00潘国宇鲍久圣胡德平邹学耀阴妍王茂森朱晨钟张磊杨瑞
工矿自动化 2024年10期
关键词:无人驾驶


关键词:露天矿自卸车;无人驾驶;横向运动控制;纵向速度控制;横−纵向协同控制
中图分类号:TD57 文献标志码:A
0引言
随着我国持续推动矿山智能化转型,作为露天矿重要运输设备,矿用自卸车朝无人化方向发展是必然要求[1-3]。车辆精准控制是实现无人驾驶的关键要素,利用运动控制模块确保车辆沿期望路径安全行驶,对提高跟踪精度与车辆稳定性至关重要[4-6]。由于露天矿路况复杂恶劣,垂直落差大、弯道及坡道占比多,自卸车车体结构与普通车辆大不相同[7]。因此,面向一般道路车辆的智能驾驶运动控制技术无法直接应用于露天矿卡,针对露天矿自卸车及其工况,研究其运动控制技术已成为促成无人驾驶落地露天矿的重要环节。
车辆运动控制通常可分为横向控制和纵向控制[8]2 个部分。横向控制通过支配转向系统实现无人车对期望路径跟踪行驶,并且保障车辆的舒适与安全[9]。横向控制根据被控车辆模型(几何学模型、动力学模型、运动学模型)的不同,采用的控制算法也有所区别[10]。文献[11]针对车辆路径跟踪时常发生的超调与振荡现象,融合强化学习机制提出了一种车辆横向比例积分微分(Proportion IntegrationDifferentiation,PID)自适应控制算法,有效提高了其控制稳定性。文献[12]针对车辆横向控制存在期望轨迹曲率突变时车辆转向不及时的问题,设计了一种融合预瞄控制的线性二次型调节控制系统,大幅降低了车辆控制误差。纵向控制主要是通过油门、刹车等执行机构对车辆的纵向速度进行控制,研究车辆对目标速度的跟随能力。文献[13]提出一种智能驾驶自学习纵向控制算法,将其应用于车辆无人驾驶系统,获得了较好效果。文献[14]提出了一种基于最小二乘策略迭代的自适应车辆纵向控制方法,采用机器学习算法实时调整车辆的跟踪距离,提高了车辆运动的安全性。文献[15]针对自动驾驶车辆纵向控制存在外界干扰、非线性等问题,提出一种基于跟随式的无模型自适应预测车辆纵向加速度控制算法,并通过仿真验证其有效性。单独使用横向控制或纵向控制无法调整车辆的转向,难以将车辆保持在目标路径上,特别是在曲线路段或急弯处,会导致车辆偏离预定路线。
由于无人车横向和纵向动力学具有耦合性,车辆横向与纵向控制通常互相关联,比如:动力影响转向,横向力影响纵向速度,轮胎的非线性特性及车速和耦合效应成正比等关系。因此在无人驾驶系统中,纵向和横向控制通常需要协调工作,以确保车辆的安全和稳定。为此一些专家针对横纵向综合控制进行了探究[16]。文献[17]为实现无人驾驶车队行驶过程中智能嵌入和脱离控制,提出一种具有横纵向控制和监督功能的车辆横纵向综合控制策略,获取车辆运行状态,并与横纵向控制模块配合完成实时监督。文献[18]针对自动驾驶车辆具有动力学约束的复杂运动控制问题,设计了一种基于模型预测控制算法的车辆横纵向综合控制系统,仿真结果证明其具有实时性强、稳定性好等特点。文献[19]针对无人驾驶车辆存在的路径不匹配、不确定及规划冗余问题,设计了一种智能车辆横纵向协同重构控制系统,该控制系统可使跟踪路径保持有界收敛,有效降低跟踪误差。文献[20]针对矿山智能驾驶自卸车综合控制进行了研究,所设计的综合控制器具有较高的车辆控制精度。文献[21]针对井下无人驾驶无轨胶轮车设计了一种基于模型预测的路径跟踪闭环控制策略,效果良好。文献[22]针对无人驾驶车辆路径跟踪精度低的问题,设计了一种融合线性二次型调节器(Linear Quadratic Regulator,LQR)及PID 控制算法的车辆横纵向耦合控制系统,并通过仿真证明该策略可在连续工况下降低跟踪误差。
通过以上文献分析可知,现有车辆运动控制策略多面向普通道路环境,对露天矿自卸车无人驾驶运动控制技术的研究较少,无法直接将现有车辆控制策略应用于矿山自卸车。因此,本文基于自卸车的矿坡路段多、车辆载质量变化大的基本运输工况,结合露天矿卡自身车体结构,设计了一种基于预瞄误差与分层反馈的智能自卸车横−纵向协同控制系统。横向控制以LQR 控制为基础,运用前馈控制器降低稳态误差,采用模糊控制器实现自适应调整预瞄距离,提高路径跟踪控制精度。纵向控制建立分层反馈式纵向速度控制器,分别采用模型预测控制(Model Predictive Control, MPC)和PID 反馈控制,建立车辆驱动及制动逆向模型,降低自卸车载质量与道路坡度改变对纵向速度追踪的影响。在分析露天矿自卸车实际运输环境所设计的空载下坡、满载上坡2 种基本工况下,仿真验证横−纵向协同控制策略的有效性。
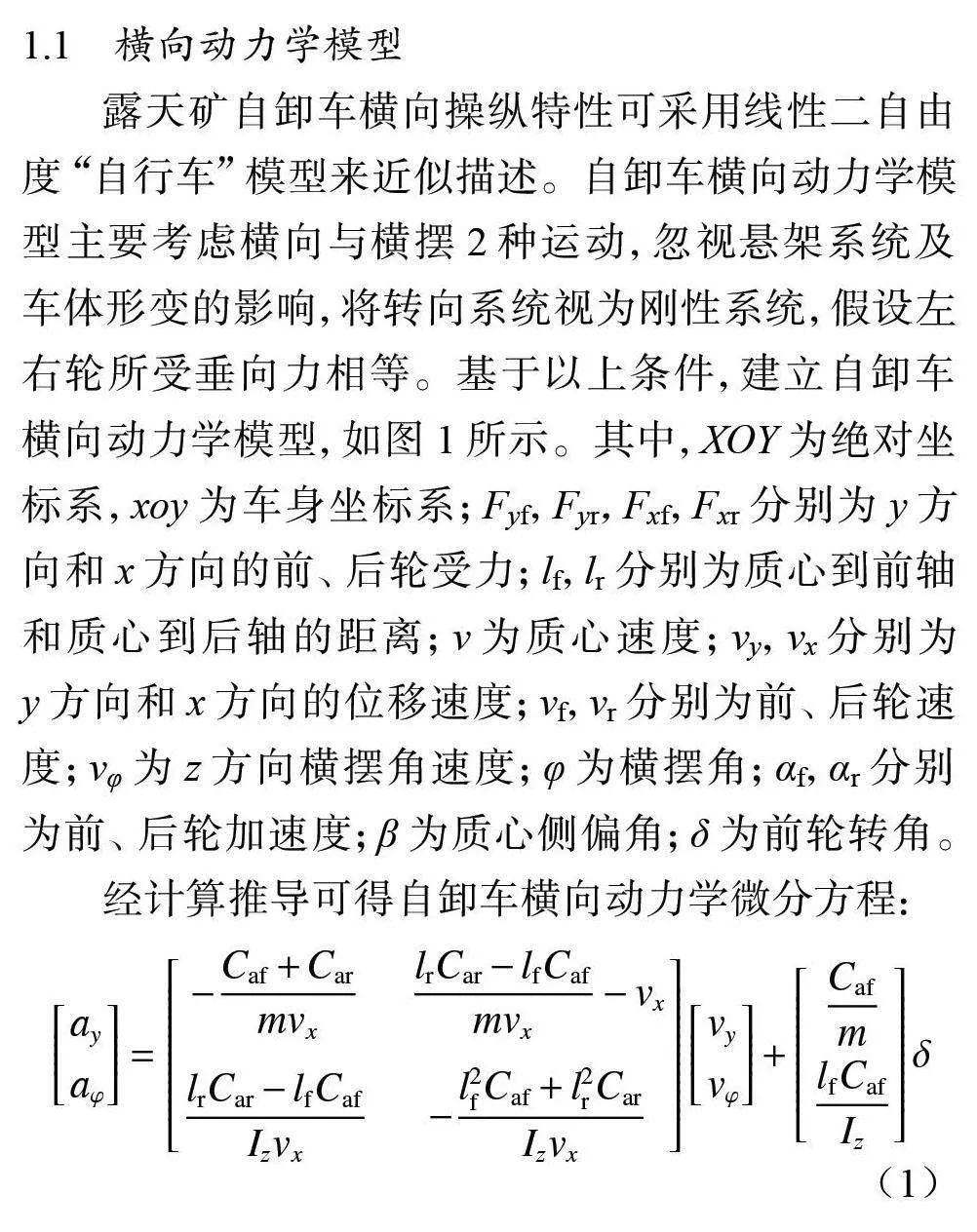
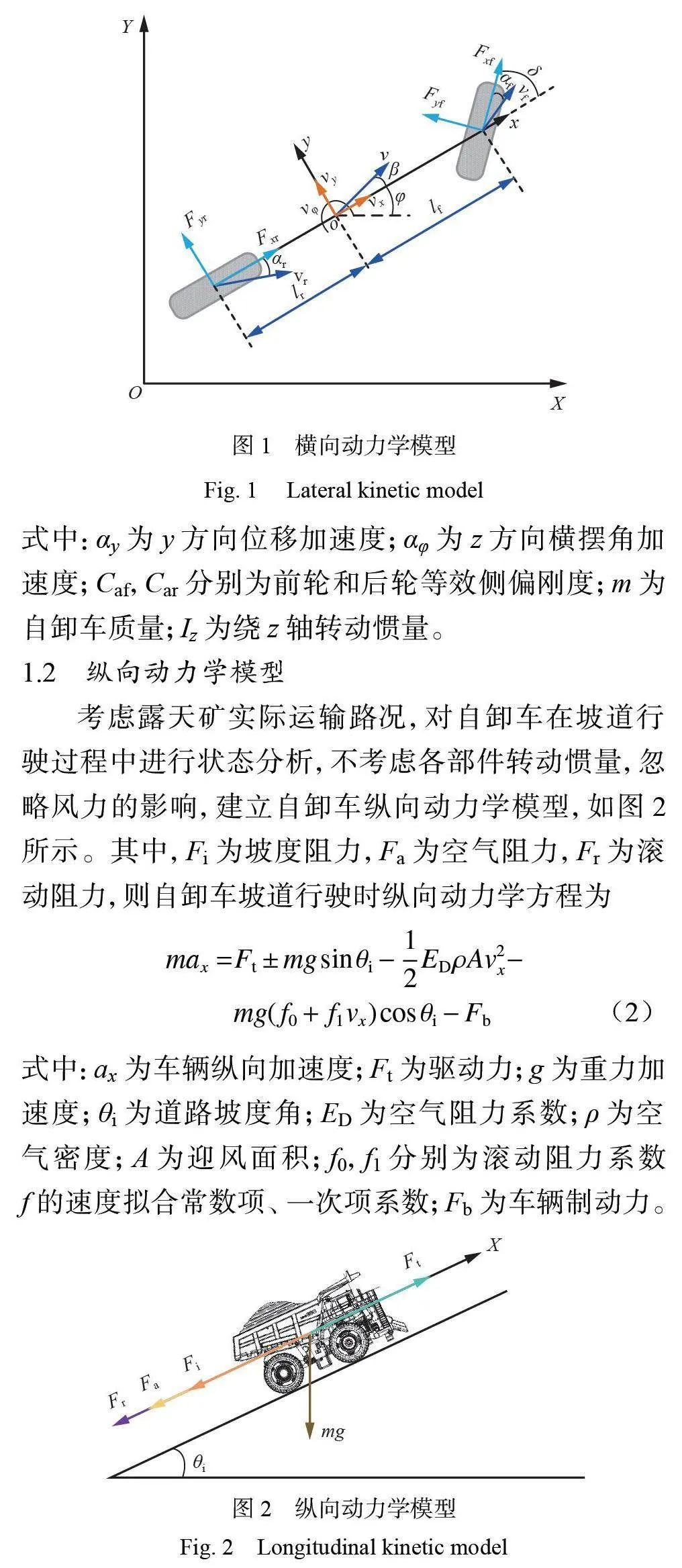
1露天矿自卸车动力学模型
通过加入坡度、负载变量及露天矿工况对动力学的影响,可以提升无人驾驶自卸车模型的代表性。这样,不仅使动力学模型更贴近矿用无人驾驶自卸车的实际工况,也为无人驾驶车辆在矿场的性能优化提供了可靠的理论支持。
2自卸车横−纵向协同控制系统设计
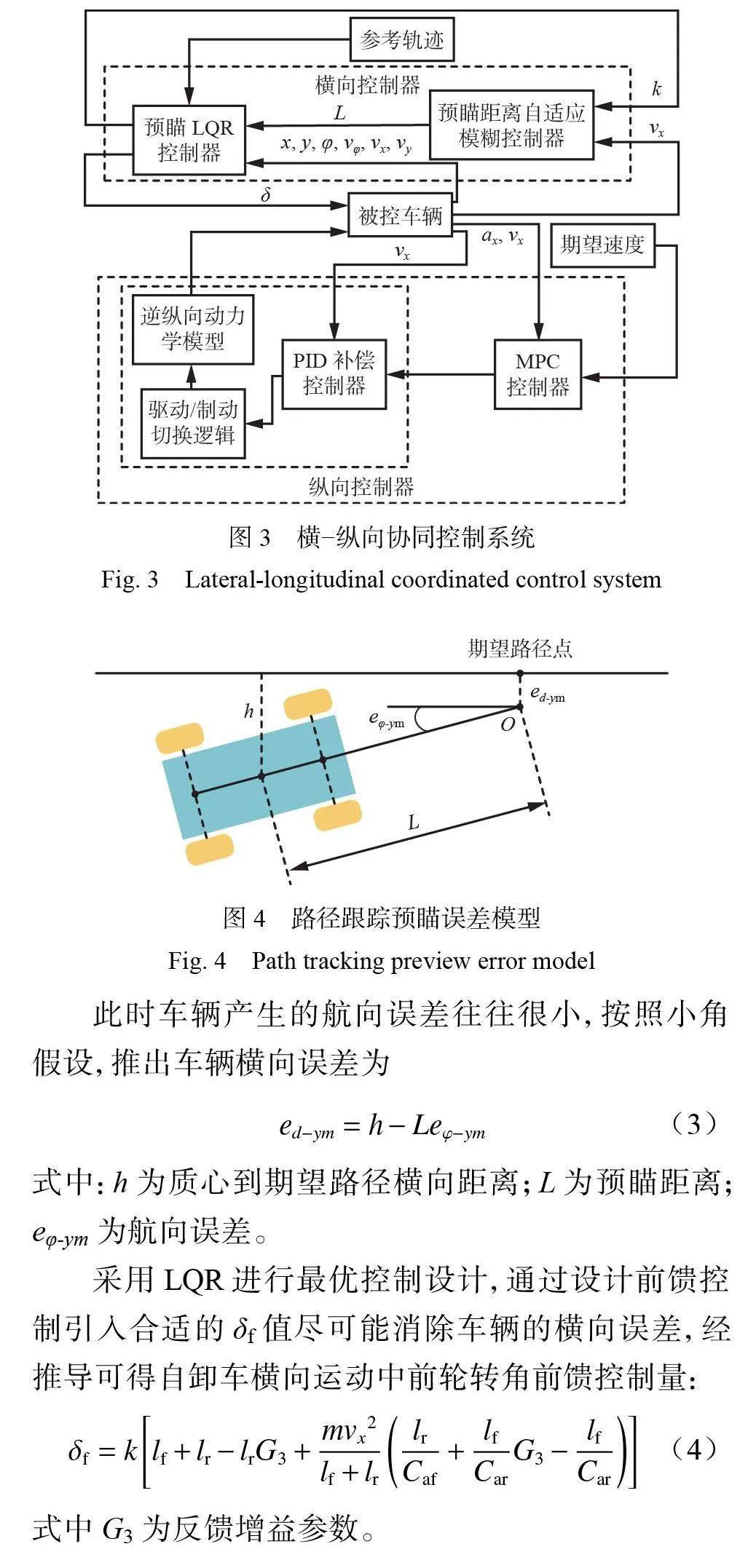
露天矿自卸车运动控制系统主要包括自适应预瞄横向控制器和分层式纵向速度控制器,如图3所示(k为路径曲率)。横向运动控制包括预瞄LQR控制器与自适应模糊控制器,纵向速度控制由基于模型预测的上层MPC 控制器和基于PID 算法的下层反馈控制器组成。其中,被控自卸车的输入参数包括前轮转角、制动主缸压力及节气门开度,输出包括矿车横向位移角、航向角、纵向速度及加速度等运动参数。
2.1自适应预瞄横向控制器设计
2.1.1预瞄LQR 控制器设计
在路径跟踪时,自卸车的预瞄点和期望路径点在纵向距离、横向距离、速度、加速度及航向等方面存在一系列误差,其中,航向和横向误差是自卸车横向运动控制的关键影响要素。本文路径跟踪预瞄误差模型如图4 所示。
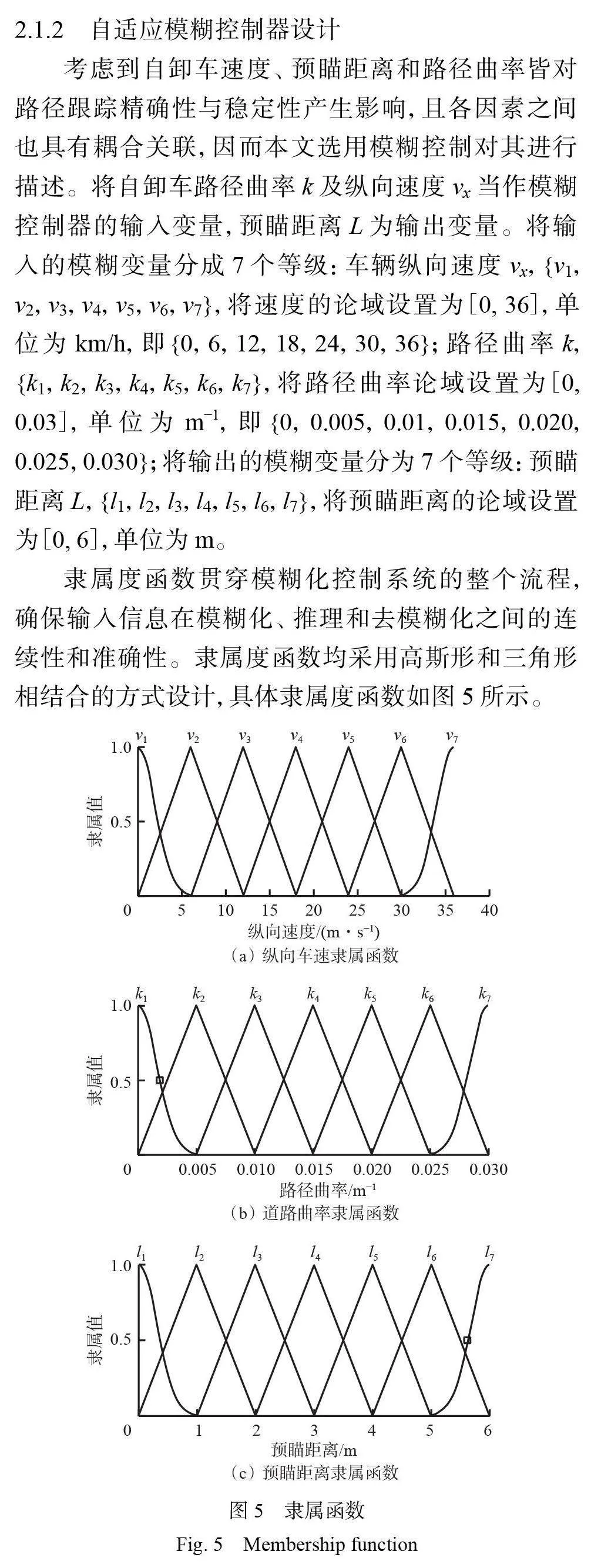
隶属度函数贯穿模糊化控制系统的整个流程,确保输入信息在模糊化、推理和去模糊化之间的连续性和准确性。隶属度函数均采用高斯形和三角形相结合的方式设计,具体隶属度函数如图5所示。
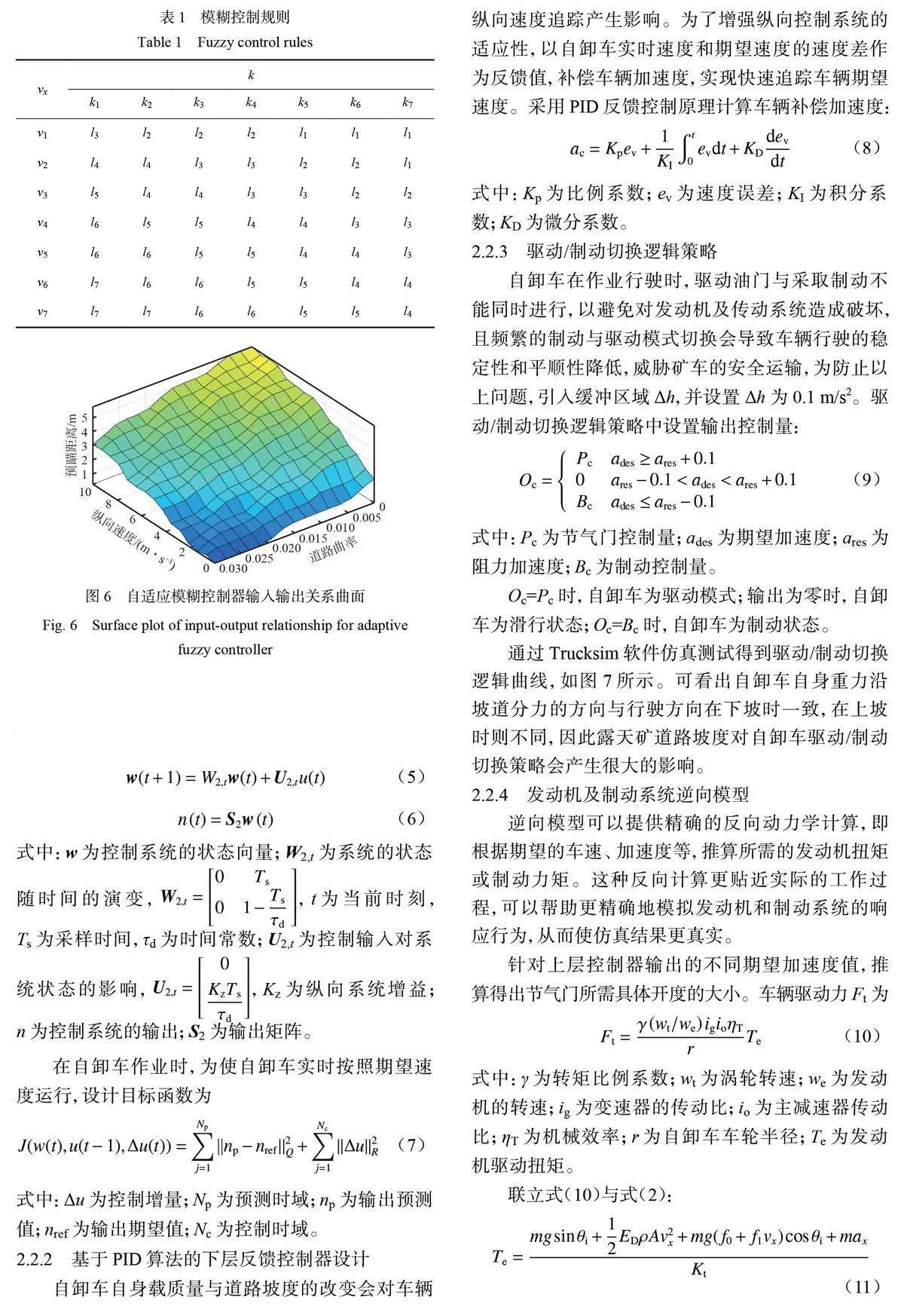
模糊控制规则见表1,自适应模糊控制器输入输出关系曲面图如图6 所示。
2.2分层式纵向速度控制器设计
2.2.1基于模型预测的上层MPC控制器设计
预测模型中的控制元素为离散型,而自卸车控制系统中输入和输出为连续型变量,首先通过前向欧拉法对系统状态离散化,得到车辆控制系统状态方程:
3仿真结果分析
3.1运输工况设计
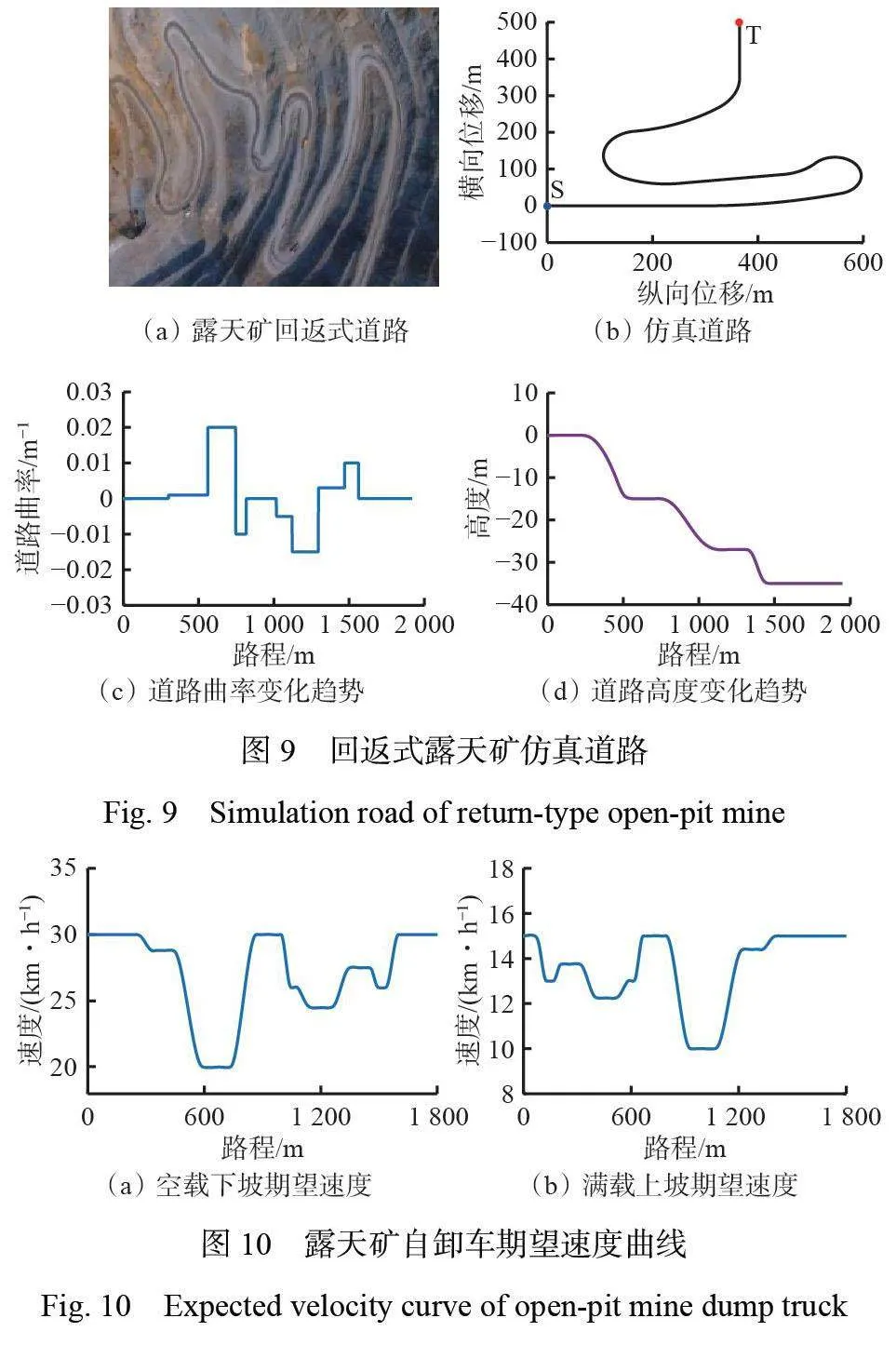
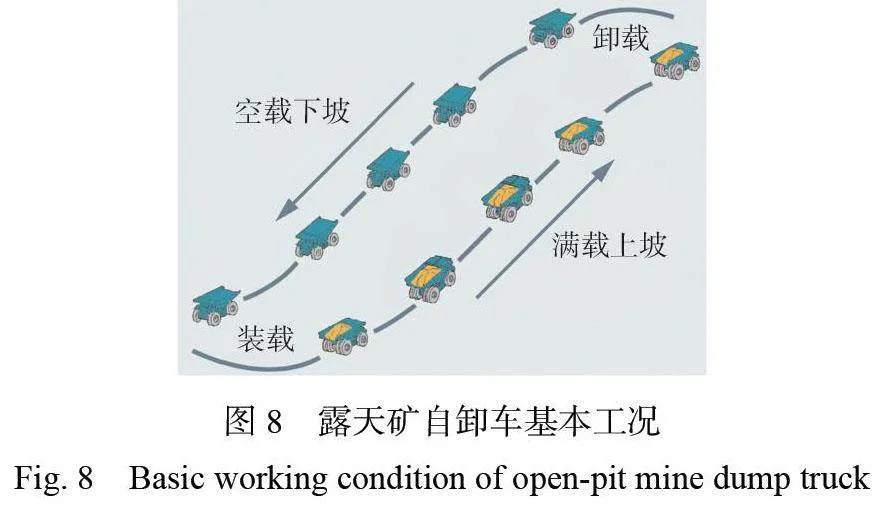
自卸车在露天矿环境中的基本工况一般包括空载下坡运输与满载上坡运输,如图8 所示。为验证本文露天矿自卸车协同控制策略的可靠性,参照露天矿中常见的运输道路形式,在仿真环境中设计回返式运输道路,如图9所示。
模拟空载下坡工况,设置起始点S 和终点T,自卸车期望速度设为30 km/h,在弯道路段对矿车采取一定降速措施,自卸车空载下坡期望速度如图10(a)所示;模拟满载上坡工况,设置起始点T 和终点S,自卸车期望速度设为15 km/h,在弯道路段对矿车采取一定降速措施,满载上坡期望速度如图10(b)所示。
3.2联合仿真模型建立
1) 横向控制器联合仿真模型建立。Trucksim 是一款用于模拟分析车辆动力学特性的仿真软件,专门为大中型卡车、自卸车、拖车等重型车辆设计,能够满足各类车辆的建模和动力学分析需求。
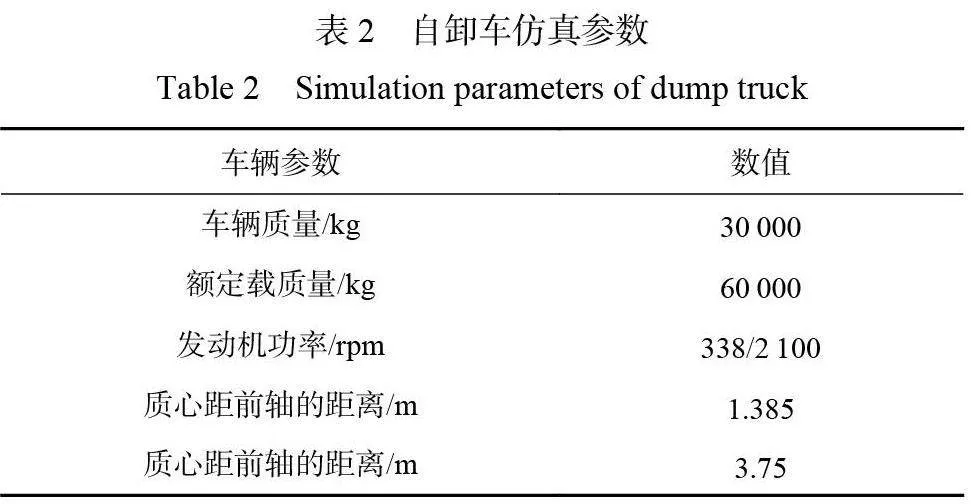
在Trucksim 中根据表2 设置车辆的质量、驱动方式、轴距等参数,构建车辆仿真模型并创建道路环境,在Simulink 中基于路径跟踪预瞄误差模型,连接各个模块,构建横向控制系统模型,并与Trucksim 建立通信连接,形成横向跟踪控制系统的闭环控制。Trucksim 输出车辆状态参数,如位置、纵向速度、横摆角等,输入参数为前轮转角。
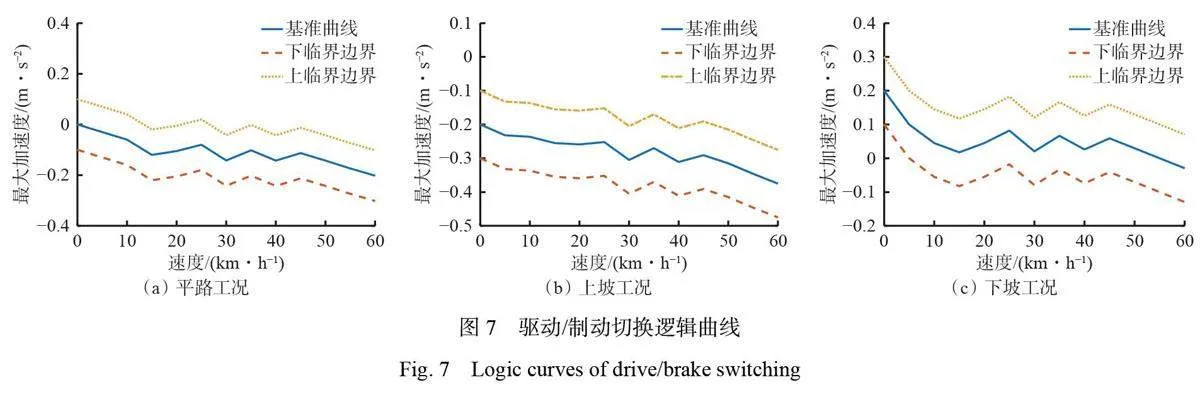
2) 纵向控制器联合仿真模型建立。为验证本文设计的纵向控制器在车辆速度跟踪中的有效性和可靠性,在Simulink 和Trucksim 中构建了联合仿真模型。在Simulink 中建立了MPC 控制模型、PID 控制模型、逆动力学模型和驱动/制动切换策略模型,在Trucksim 中搭建了车辆模型。Trucksim 输出车辆姿态参数,输入包括节气门开度和制动主缸压力,仿真所用的车辆参数与横向控制器的一致。
3)横−纵向联合仿真模型建立。在车辆运动控制中,横向控制和纵向控制的耦合点是纵向速度,因此将受纵向控制器影响的实际纵向速度代替横向控制器中的固定速度,从而构建横−纵向协同控制器。相比单独的横向控制器,这种控制器更贴合车辆的实际运动控制需求。
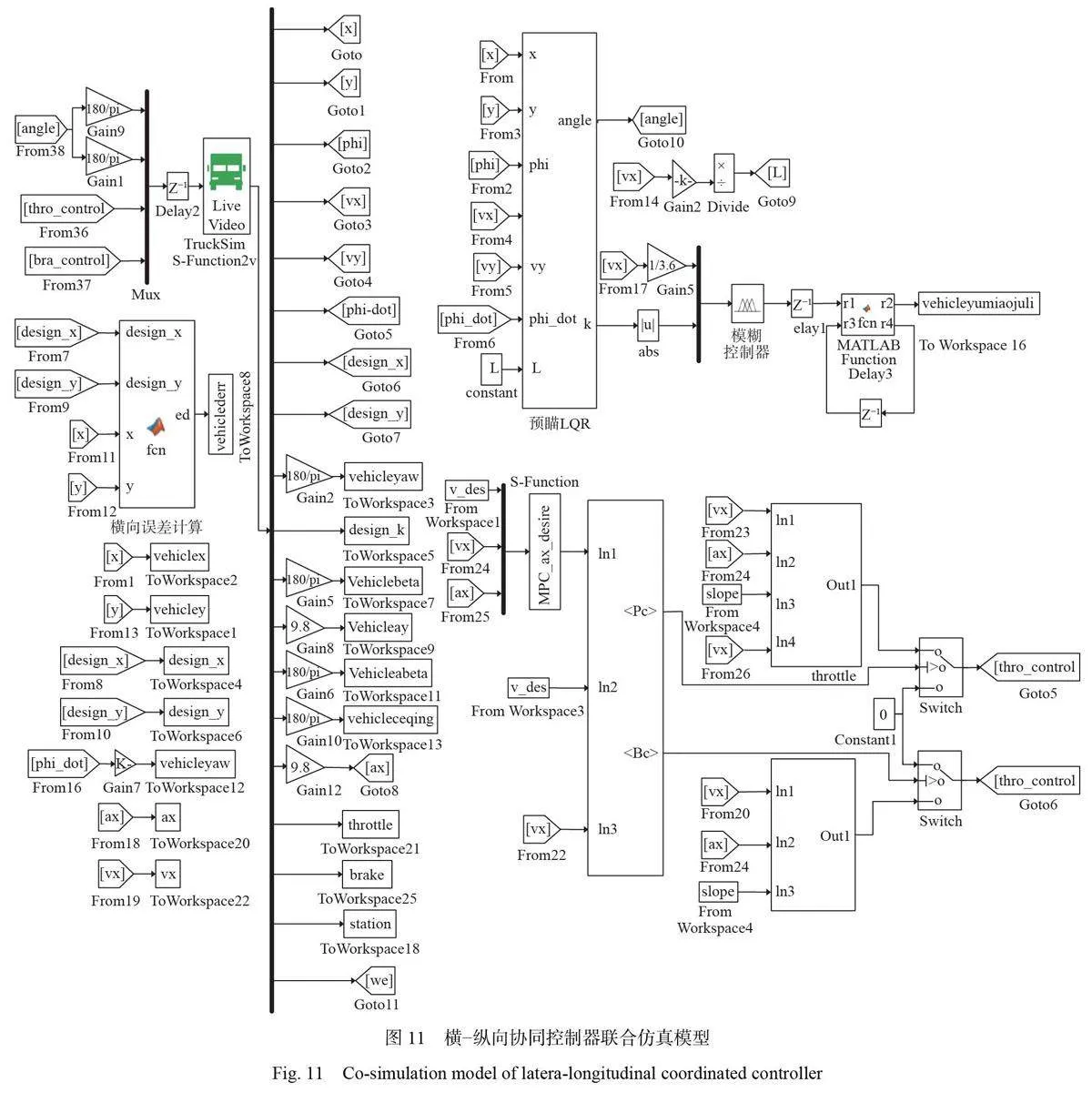
为验证本文提出的自卸车协同控制器的可靠性和准确性,根据表2,在Simulink 和Trucksim 环境中建立联合仿真模型,如图11所示。
3.3仿真结果分析
3.3.1期望速度跟踪仿真结果分析
根据露天矿回返式仿真道路及工况,设置仿真道路附着系数为0.85,开展协同控制仿真试验。2 种工况下期望速度跟踪仿真结果如图12 所示。
由图12可知,在1800m仿真路段中,空载下坡工况最大速度误差小于0.4km/h,由于满载上坡时自卸车行驶速度较低,此时车辆最大速度误差仅为0.15 km/h。综上,车辆实际速度和期望速度误差在2% 以内,说明自卸车在2 种不同工况下速度跟踪效果能够满足要求。
3.3.2路径跟踪仿真结果分析
在空载下坡与满载上坡工况下,开展本文横−纵向协同控制与单横向控制的路径跟踪对比试验,自卸车在2种工况下路径跟踪主要参数仿真结果如图13和图14所示。
由仿真结果可得,相较于横向控制,横−纵向协同控制下的车辆在2种工况下的预瞄距离变化幅度更大,且较为平滑,这能够有效减小自卸车速度波动对路径跟踪的影响。空载下坡工况下横−纵向协同控制器的横向误差峰值与方向误差峰值较横向控制器分别降低24.67% 和29.12%;满载上坡工况下横−纵向协同控制器的横向误差峰值与方向误差峰值较横向控制器分别降低22.35% 和43.96%,且协同控制的误差波动更小。横摆角速度、侧向加速度和侧倾角车辆状态参数是影响自卸车操纵稳定性的重要因素,在空载下坡工况下横摆角速度、侧向加速度和侧倾角峰值较横向控制器分别降低32.93%, 54.73%,47.06%,在满载上坡工况下横摆角速度、侧向加速度和侧倾角峰值较横向控制器分别减少30.65%,51.37%,46.81%,且横−纵向协同控制下的该参数波动也明显小于单一横向控制。综上,由于横−纵向协同控制能够针对路径曲率的不同实时调节车辆速度,在2 种工况下,自卸车横−纵向协同控制器相比于单一横向控制都获得了更高的路径跟踪精度,同时也提高了自卸车的操纵稳定性。
4实验室模拟试验
为了对本文提出的控制策略进行进一步的验证,需要通过开展实车试验研究。由于实车试验容易发生危险事故,受制于试验条件且真实矿山道路难以复现等难题,搭建无人驾驶自卸车模型试验车,并按照20∶1 的比例设计搭建了露天矿模拟道路模型,作为试验环境。由于模型试验车采用电动机驱动系统且无制动系统,故针对发动机驱动和液压制动所设计的纵向控制器,目前在实验室条件下尚无法进行移植验证,因此仅开展了横向控制的实验室模拟试验。
4.1模型试验车搭建
模型试验车的组成部分如图15 所示,试验车基本参数见表3。感知导航系统由惯性测量单元和激光雷达组成,惯性测量单元能够实时记录试验车的位姿,而激光雷达则通过构建栅格地图来实现定位和周围环境感知。规划决策系统采用Jetson NanoB01 开发板作为主控制器,搭建Ubuntu 16.04 操作系统和ROS 软件框架,能够处理来自感知导航系统的信息,规划试验车的下一步动作,并控制运动执行系统。运动执行系统接收上层控制命令,通过驱动电动机和转向舵机来实现试验车的驱动、制动和转向操作。
4.2露天矿模拟道路搭建
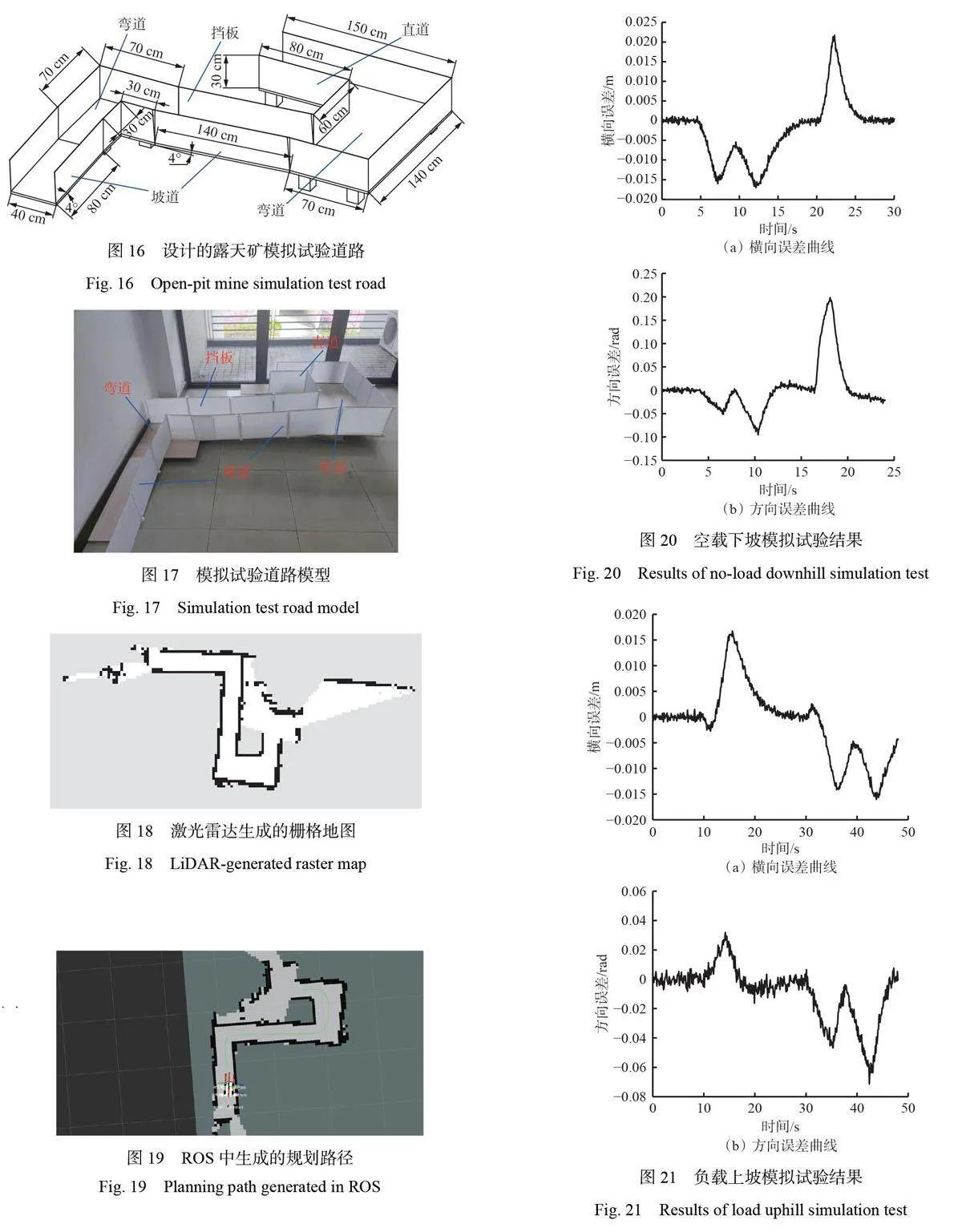
在构建露天矿模拟道路时,需要兼顾尽可能真实地模拟出露天矿的各种道路类型,同时考虑经济性和实用性。由于车辆的横向跟踪误差主要发生在弯道路段且更为明显,因此模拟道路模型以弯道为基础,并结合具有露天矿典型特征的坡道,组成完整的模拟试验道路。道路的宽度设计为40cm,包含2个转弯区域和2个坡度为4°的坡道。为了提高激光雷达建立地图的精度,在模拟道路的两侧设置了高度为30cm 的挡板。设计的露天矿模拟试验道路如图16所示,在实验室内搭建的模拟道路如图17所示。
完成露天矿模拟道路的搭建后,需要在ROS系统中使用激光雷达生成栅格地图,生成的栅格地图如图18所示。
4.3模拟试验结果与分析
基于生成的栅格地图,对模拟试验道路的起点和终点进行了路径规划,如图19 所示。生成的路径曲线将作为模型试验车的跟踪路径。
为了模拟露天矿自卸车的典型运输工况,在搭建的露天矿模拟试验道路上进行了模型试验车的空载下坡和负载1 kg 上坡的模拟试验。空载下坡试验的初始速度设定为0.2 m/s,负载1 kg 上坡试验的初始速度设定为0.1 m/s。试验结果如图20 和图21所示。
由图20可看出,空载下坡时的横向误差峰值为0.0199m,方向误差峰值为0.1840rad。误差增大均发生在弯道处,但误差波动范围较小,能够保证模型试验车对期望路径的跟踪。由图21可看出,负载上坡时的横向误差峰值为0.0168m,方向误差峰值为0.0714rad,误差变化趋势与空载下坡试验相反,但误差仍在合理范围内,模型试验车的跟踪效果良好。2 个误差峰值均小于空载下坡试验,验证了不同速度对横向控制精度的影响规律。
5结论
1) 针对现有车辆运动控制策略多面向普通道路环境,无法直接应用于矿山自卸车的问题,面向露天矿自卸车无人化升级需求,设计了一种基于预瞄误差与分层反馈的无人驾驶自卸车横−纵向协同控制系统,并建模进行了仿真验证。
2) 针对自卸车横−纵向协同控制问题,横向上设计了自适应预瞄横向控制器,纵向上设计分层式纵向速度控制器,以车辆纵向速度为耦合点,建立了横−纵向协同控制器。
3) 基于Simulink 和Trucksim 设计模拟露天矿典型工况并进行联合仿真对比试验,横−纵向协同控制能够针对路径曲率的不同实时调节车辆速度, 在2 种工况下,自卸车横-纵向协同控制器相比于单一横向控制都获得了更高的路径跟踪精度,同时也提高了自卸车的操纵稳定性。
4) 在实验室搭建无人驾驶自卸车模型试验车,并以露天矿回返式道路为原型设计搭建了模拟道路模型,分别开展了不同工况下的横向控制模拟试验;结果表明:① 空载下坡时的横向误差峰值为0.0199m,方向误差峰值为0.1840rad。能够保证模型试验车对期望路径的跟踪。② 负载上坡时的横向误差峰值为0.0168m,方向误差峰值为0.0714rad,误差变化趋势与空载下坡试验相反,但误差仍在合理范围内,模型试验车的跟踪效果良好。
猜你喜欢
控制与信息技术(2022年5期)2022-11-19 08:33:52
作文小学中年级(2022年9期)2022-09-08 06:13:30
中国特种设备安全(2021年11期)2021-05-05 06:13:28
科学(2020年3期)2020-11-26 08:18:28
小哥白尼(军事科学)(2020年8期)2020-05-22 06:28:02
专用汽车(2018年10期)2018-11-02 05:32:26
空中之家(2017年11期)2017-11-28 05:28:21
汉语世界(2017年5期)2017-09-21 07:44:38
科学大众(中学)(2017年3期)2017-07-06 18:38:29
百科探秘·航空航天(2016年12期)2017-01-15 13:33:04