基于时空连续补偿的矿山可通行区域识别方法
2024-12-31 00:00:00代博王亚飞李若尧李泽星章翼辰张睿韬
工矿自动化 2024年10期

关键词:露天矿山;无人驾驶矿卡;可通行区域识别;区域连通性滤波;时空连续补偿;点云分割
中图分类号:TD67 文献标志码:A
0引言
随着自动驾驶技术的不断进步及人们对智能化和自动化需求的日益增长,无人驾驶矿用卡车(矿卡)技术迅速落地使用[1]。与城市结构化道路场景相比,矿山非结构化道路场景具有一定特征,包括激光雷达点云特征稀疏、道路边界模糊不清及路面平坦度不一致,这些差异给矿山场景自动驾驶技术带来了很多挑战。
无人驾驶矿卡的高效运行依赖于对道路可行驶区域的精确提取,这不仅是其感知和规划能力的核心,也是实现车辆安全运行[2-3]的基础。三维激光雷达凭借其高精度、广泛的感知范围和强大的鲁棒性,在点云分割任务中变得尤为重要[4]。而矿山道路场景崎岖不平,道路边界不清且路面平坦度不一,使得基于单一平面拟合的传统可通行区域识别方法效果较差。加之激光雷达高线束化产生的大量数据,对点云分割方法的实时处理能力提出了更高的要求。因此,有必要开发一种能够准确迅速地从矿山道路环境中分割提取可通行点的方法。
近年来,许多学者对三维激光雷达道路可通行区域识别问题进行了研究。文献[5-6]提出基于高斯过程的方法,使用非恒定分辨率的地面模型进行处理,提供了连续的概率表面或基于范围图像结构构建的地形网格,用于表示地面可通行性。文献[7-8]提出了基于马尔可夫随机场的方法,考虑了传感器姿态和测量不确定性、测量与地图关联及单元内测量融合,通过最大似然估计来估计地形粗糙度参数,进而获取地面可通行性。以上方法都取得了较好的可通行区域识别效果,但这些方法计算复杂度较高,在矿车上搭载的计算平台难以实现实时运行。文献[9]提出了RangeNet++模型,将三维点云投影为二维距离图像作为网络的输入,实现了准确高效的可通行区域识别结果。然而,矿山场景中路面结构不规则,点云语义标签标注难度大,难以构建足以供网络训练的大规模数据集,因此该类方法在此场景下较难应用。文献[10]将三维点云投影为带有高程信息的二维栅格地图,并设定高程阈值来判断栅格的可通行性。 文献[11]在文献[10]的基础上为每个栅格添加了平均高度及协方差信息,丰富了栅格的可通行性评价指标。然而,矿山场景下道路常常存在坡度,会导致单一平面拟合效果变差,造成可通行区域识别错误。文献[12-13]的多平面拟合方法通过对扇形栅格内的点云拟合直线获取地面信息,进而实现栅格内的可通行点云提取。但该方法因使用的直线模型较为简单,分割效果易受崎岖路面影响。文献[14]将点云沿X 轴分成3 个部分,并假设斜坡通常沿此轴变化,但这一假设在崎岖道路或复杂交叉口的情况下可能不成立。为了解决这一问题,文献[15]引入了一种斜坡鲁棒性方法,该方法利用扫描数据中连续的环形模式及沿径向方向的区域来估计平面的连续性。然而,该方法没有考虑激光雷达在不同距离及不同入射角条件下的差异。针对该问题,文献[16]开发了一种基于点云密度或入射角度的自适应方法来设置网格大小,进一步提升了文献[15]的高程估计精度。文献[17]提出了一种基于区域的可通行区域识别方法,根据激光雷达的距离,使用近密远疏的同心区域模型进行地面分割,然而该方法测量噪声存在一些异常值。在文献[17]的基础上,文献[18]优化了基于反射噪声原理的异常值移除方法,并增强遗漏点云的恢复。然而,该方法对于崎岖度多变的场景难以实现鲁棒的地面分割。
针对矿山道路场景特点,本文提出了一种基于时空连续补偿的矿山可通行区域识别方法。分别利用区域生成方法和基于密度的噪声应用空间聚类方法,对初始可通行区域进行区域级别连通性滤波及点级别连通性滤波,并根据滤波结果得到符合空间连通性的可通行区域。基于时间区域一致性对不同点云帧中可通行性不一致的不稳定区域进行滤除,根据正态分布变换方法构建栅格地图,再利用时间稳定权重判断栅格稳定性,最终通过区域栅格投影实现不稳定区域的滤除。
1方法概述
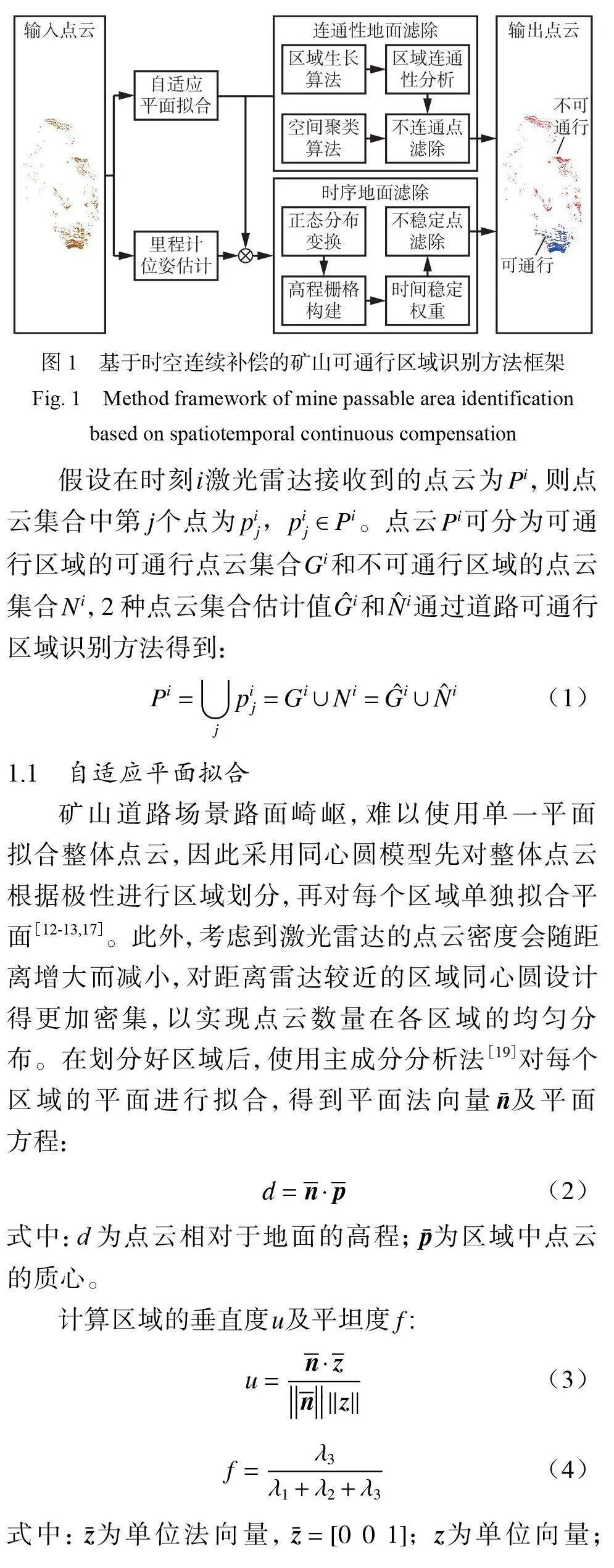
基于时空连续补偿的矿山可通行区域识别方法包括自适应平面拟合、连通性地面滤波、时序地面滤波3 个部分,如图1 所示。三维激光雷达点云为输入数据,经过可通行区域识别后得到可通行点云和不可通行点云2 种输出数据。
1.2连通性地面滤波
初始可通行区域识别结果中存在一些距离车辆较远的点,尽管满足了高程、垂直度及平坦度的要求,被分类为可通行点,但是这些点被不可通行点完全包裹住,车辆实际上并不能到达此类可通行点,因此将此类点划分为不可通行点。连通性地面滤波方法可分为区域滤波及点滤波2 部分。
1.2.1区域滤波
设所有符合垂直度和平坦度阈值的可通行区域组成区域集合Z。对于集合Z中的每一个可通行区域元素,使用区域生长方法获取区域与车辆之间的连通性。
在初始化阶段,任取区域集合Z中的一个可通行区域zi,查询当前区域上下左右4 个邻域的可通行性,将其中可通行的邻域加入区域集合L中,并继续迭代遍历集合L中的元素,在遍历全部区域元素后,若集合内存在车辆所在区域,则将全部区域标记为连通区域,否则标记为非连通区域。然后,继续任选区域集合Z中未被连通标记过的可通行区域zj,并重复初始化操作,直到遍历区域集合Z中的全部元素。对于不符合连通性要求的所有非连通区域,将该区域更改为不可通行区域,区域中所有点标记为不可通行点。
1.2.2点滤波
在对可通行点进行区域级别滤波后,还需对符合连通性的可通行区域进一步进行点级别的地面滤波操作。
首先,将区域滤波得到的全部连通区域中的点构建为点集C;然后,使用基于密度的噪声应用空间聚类(Density-Based Spatial Clustering of Applicationwith Noise, DBSCAN)方法[20]遍历点集中的所有点,划分出不符合密度要求的离群点。该类点周围相邻点密度较小,连通性较低,因此将其归类为不可通行点,其余中心点仍保存为可通行点。
1.3时序地面滤波
在自适应平面拟合后,被分类为可通行的区域可能是时序不稳定的。在连续几帧激光点云中(时间小于1 s),理论上一个区域的几何特征不会发生较大变化,该区域的可通行性也应保持不变。因此,一旦出现在连续几帧激光点云中方法对于同一个区域的可通行性判断发生变化,则称该方法出现了时序不稳定问题。
时序不稳定问题主要与方法的自适应阈值调整有关。为了提高方法对于矿山崎岖道路的适应性,在设置区域各参数阈值时,会根据区域周围邻域的平整条件自适应更新。这种方法虽然实现了单帧点云分割效果对于不同崎岖程度路面的适应性,但由于车辆运动,导致以车体为中心的区域划分结果改变,造成同一区域邻域的粗糙度发生变化,进而在自适应阈值调整后导致阈值更改。因此,对于同一区域不同时间戳的道路可通行区域识别结果出现分歧,从而形成不稳定区域。
为滤除不稳定区域,首先,通过激光里程计Fast−LIO[21]估计相邻帧间点云的位姿变换关系,并使用正态分布变换方法(Normal Distribution Transform,NDT)[22]构建高程可通行栅格地图。然后,根据时间衰减公式计算每个栅格的稳定性,并将小于稳定性阈值sτ的区域分类为不稳定栅格。最后,通过区域栅格投影获取区域中稳定性栅格所占比例q,将小于比例阈值qτ的区域视为不稳定区域,即将该区域中的所有点标记为不可通行点。
2测试设置
目前公开数据集中没有矿山道路场景,因此,本文采用无人驾驶矿卡测试平台在露天矿山场景下录制了矿山场景数据集。
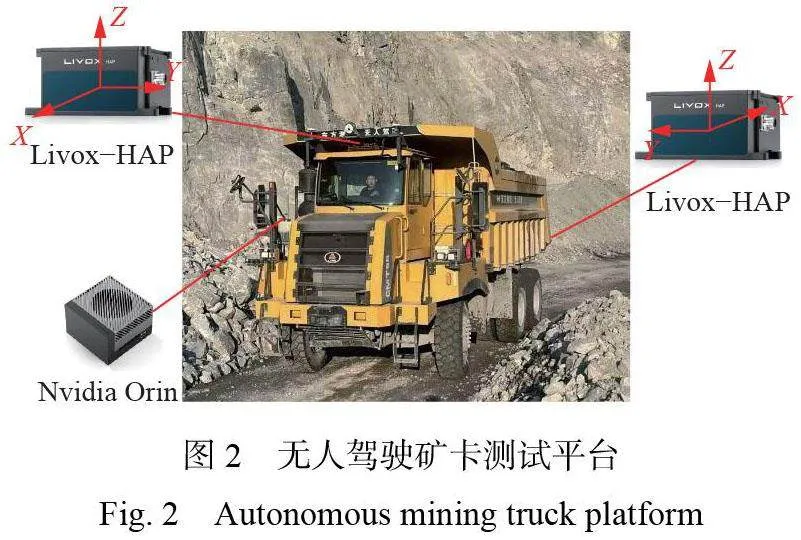
2.1测试平台介绍
用于采集矿山场景数据集的无人驾驶矿卡测试平台如图2 所示。矿卡在车辆前方和后方共配置了2 台Livox−HAP 固态激光雷达,用于车辆感知,并使用Nvidia Orin 作为上位工控机。
2.2测试数据采集与真值标注
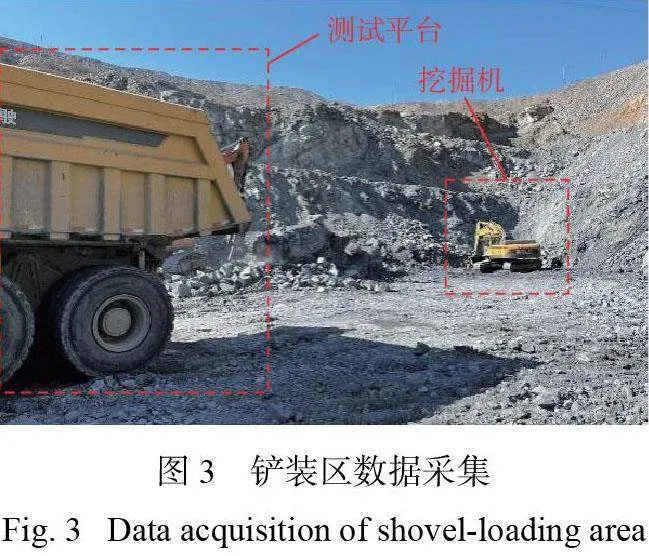
矿山铲装区域中石块等障碍物较多,路面较主路更加崎岖,对矿山可通行区域识别方法更具挑战性,因此将该场景作为数据集的目标场景。矿山铲装区区域如图3所示。
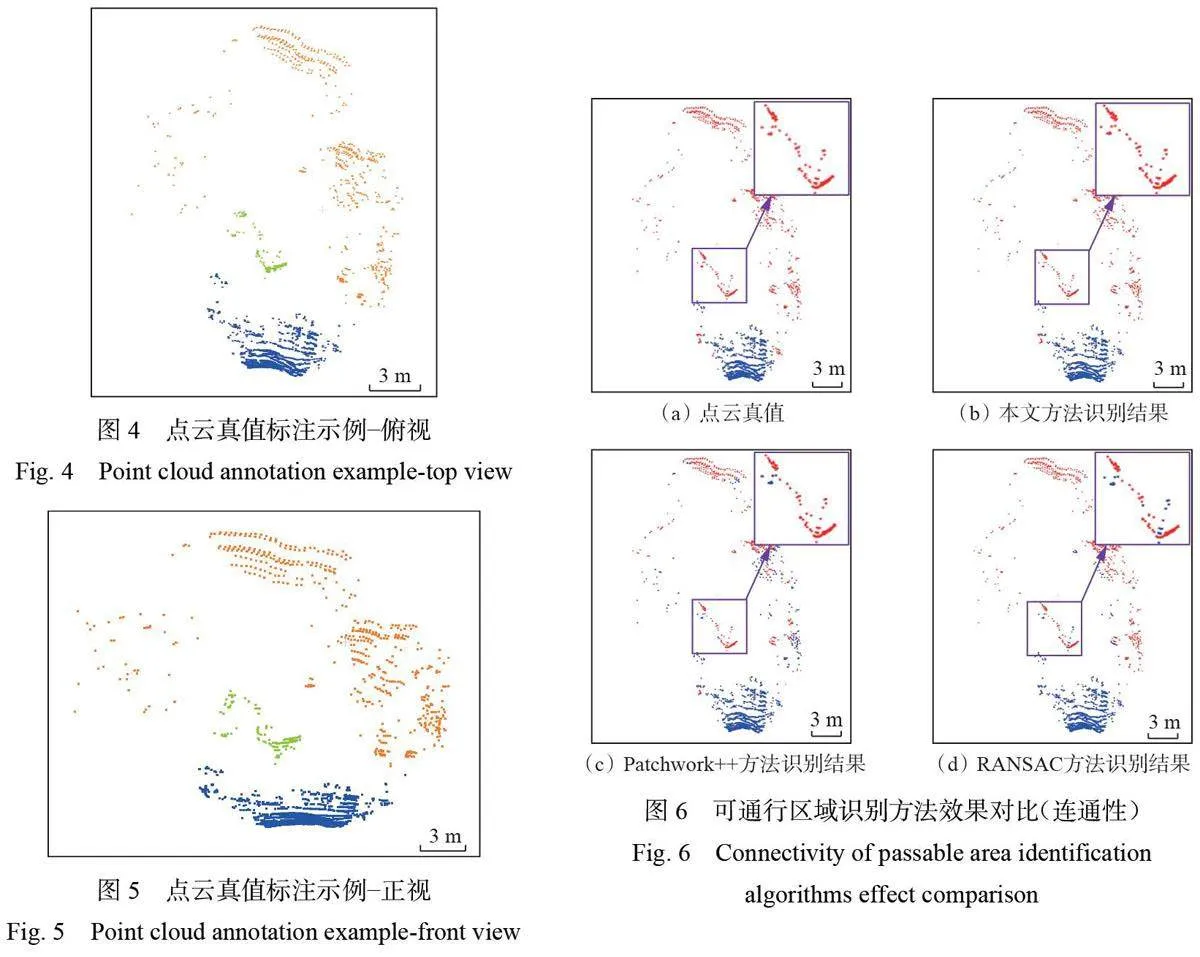
本文方法的应用场景为矿山铲装区,其道路往往缺少清晰边界且崎岖不平,自动化真值标注方法的标注质量不佳。因此,根据矿山实际生产经验,使用点云处理工具CloudCompare 对矿山铲装区域点云数据集进行可通行性语义真值标注。标注后的点云如图4(俯视图)、图5(正视图)所示,其中橙色山体点云和绿色挖机点云为不可通行点云,蓝色地面部分代表可通行点云。数据集共标注点云20帧。
3方法测试
本文进行方法测试的计算平台配置: i7−12700H 处理器、RTX 3060 显卡及40 GiB 内存,系统环境为Ubuntu 20. 04。
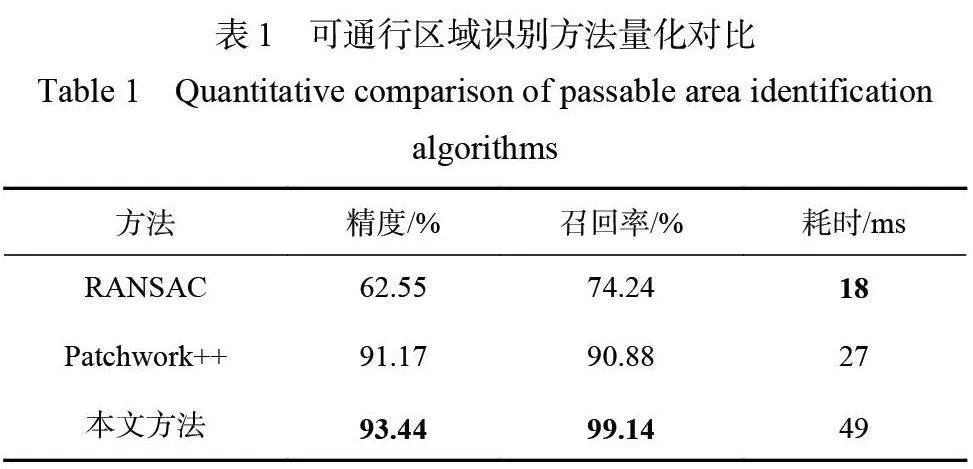
为定量评估对比各方法的分割精度,本文采用精度(Precision)和召回率(Recall)2 个指标进行分析,精度和召回率越高,说明方法的可通行区域识别效果越好。
选取多平面拟合方法Patchwork++[18]和单平面拟合方法RANSAC[23]与本文方法进行对比。为评估各可通行区域识别方法在矿山数据集中的平均表现效果,对所有点云帧的精确率P和召回率R取平均值,并计算点云分割的平均时间,对比结果见表1 。
由表1 可看出,本文方法的精度较Patchwork++方法提升了2.27%,召回率提升了8.26%,方法处理每帧点云的平均耗时为49 ms,满足场景可通行区域识别的实时性要求。
为验证本文方法在连通性滤波部分的优化效果,选取数据集中点云感知道路区域存在不连通问题的场景进行验证,如图6 所示。从图6(a)可看出,紫色框区域中点云与当前车辆位置并不连通。 本文方法将紫色框中所有点云均判定为不可通行点,而Patchwork++方法和RANSAC 方法在紫色框中均出现错检情况,证明了本文方法在道路不连通区域仍能实现准确的可通行区域识别。
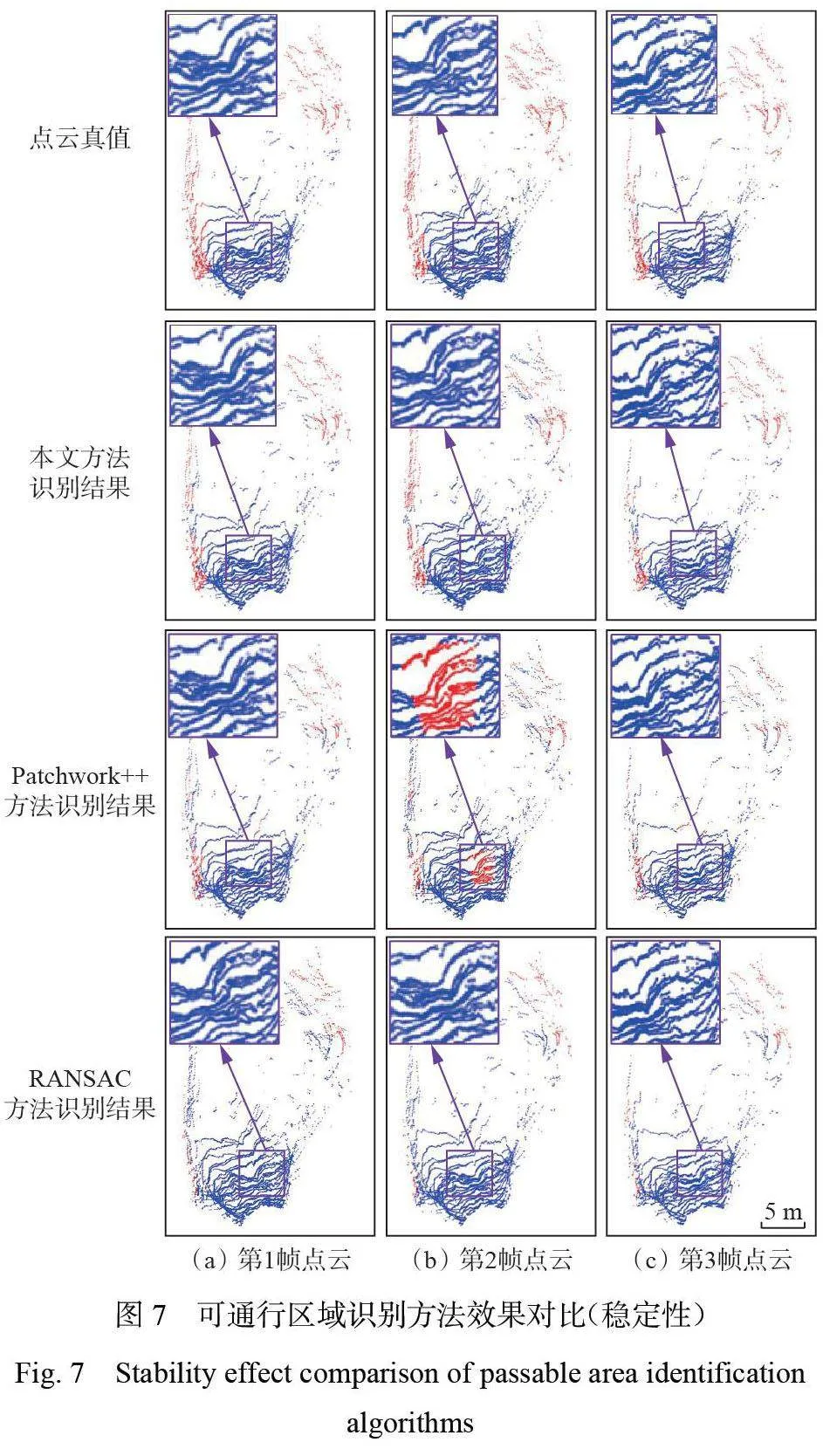
3种方法的时序稳定性对比如图7 所示。选取图7 中紫色框区域的点云为主要研究对象。由于时序不稳定问题是因多平面拟合方法的不合理区域划分导致,基于单平面拟合的RANSAC 方法不会出现时序稳定性问题,因而本测试的主要对比对象为基于多平面拟合的Patchwork++方法。从图7(a)可看出,紫色框区域在3 帧点云中(即0.3 s 时间内)均为可通行。Patchwork++方法检测结果在第2 帧中将紫色框中的点云识别为不可通行,即出现了不稳定的检测效果。本文方法将3 帧点云中紫色框区域点云识别为可通行,实现了稳定的检测效果,证明了本文方法为时序稳定的多平面拟合方法。
4结论
1) 提出了一种基于时空连续补偿的矿山可通行区域识别方法。该方法首先对激光点云进行自适应平面拟合,得到初始可通行区域识别结果;然后基于空间连通性对可通行区域进行区域滤除和点滤除;最后基于时间区域一致性对不稳定的可通行区域进行滤除。
2) 经矿山实地测试,基于时空连续补偿的矿山可通行区域识别方法的精确率为93.44%,较现有主流方法提升2.27%;召回率为99.14%,较现有主流方法提升8.26%。
3) 通过连通性测试验证了基于时空连续补偿的矿山可通行区域识别方法对非连通场景的鲁棒性。
4) 通过稳定性测试验证了基于时空连续补偿的矿山可通行区域识别方法对平坦度变化剧烈场景的鲁棒性。