基于模糊PID的颚式破碎机双气动过载保护控制方法
2024-12-31 00:00:00曲星宇
工程机械与维修 2024年10期
关键词:模糊PID


摘要:颚式破碎机过载状态具有差异性,导致单一模式的双气动过载保护难以达到利用的效果,为解决这一问题,提出一种基于模糊PID的颚式破碎机双气动过载保护控制方法。在充分分析颚式破碎机双气动过载保护工作原理基础上,构建颚式破碎机双气动过载保护模型。将过载程度、气压变化率以及当前系统状态作为模糊PID的输入参量,进行模糊化处理后,结合根据模糊规则库与实时工况,动态调整气胎离合器的参数。实验结果表明,应用设计的控制方法,其对应的无杆腔压力收敛速度最快,能够实现对过载状态有效响应,并作出可靠保护。
关键词:模糊PID;颚式破碎机;双气动过载保护;模糊规则库
0" "引言
对于颚式破碎机而言,过载会导致其工作状态不稳定,进而影响其破碎效果,使得破碎后的物料粒度不均匀,影响后续加工流程[1]。同时长期过载运行也会加剧设备内部零部件的磨损,从而缩短设备的使用寿命。除此之外,过载运行还容易导致设备出现故障,如电机过热、皮带断裂、轴承损坏等,增加维修成本和停机时间。从能耗角度分析,过载时设备需要消耗更多的能量来维持运行,导致能耗增加,不利于节能减排[2]。
精确控制破碎机的运行状态和过载保护过程,对于减少不必要的能耗和浪费具有重要的现实意义。针对于此,众多学者开展了一系列研究。王爱丽[3]对颚式破碎机过载保护优化方法进行了研究。其主要通过设计弹簧摩擦离合器、液压摩擦离合器等装置进行保护。当设备过载时,飞轮装置在轴承外产生自由滑动,从而起到保护作用。这种方法多应用于简摆颚式破碎机,其恢复过程较为复杂。
宋学飞等[4]在分析氮气保护气流粉碎机的特点基础上,利用氮气惰性气体的属性,在过载保护过程中有效隔绝氧气和水分,减少设备内部零部件的氧化和腐蚀,从而增强保护效果。在响应过载情况时,通过调整氮气压力或流量来实现对设备的快速保护。但氮气保护系统需要稳定的氮气供应,对于偏远地区或氮气供应不便的工况可能不适用。
基于以上研究成果,本文提出一种基于模糊PID的颚式破碎机双气动过载保护控制方法,并通过对比测试的方式,分析所设计控制方法的应用效果。该设计方法不仅克服了传统PID控制参数固定不变的缺点,还充分利用了模糊控制的智能性和鲁棒性,为颚式破碎机的安全运行提供了有力保障。
1" "颚式破碎机双气动过载保护控制方法设计
1.1" "构建颚式破碎机双气动过载保护模型
1.1.1" "过载保护总体思路
本文在构建颚式破碎机双气动过载保护模型时,充分考虑了颚式破碎机双气动过载保护的工作原理。颚式破碎机双气动过载保护系统,主要包括气胎离合器、气压控制系统、散热系统以及过流保护继电器[5-6]。在具体保护过程中,气胎离合器通过控制压缩空气的充放,实现离合器的结合与分离,从而结合破碎机具体状态实现过载保护。
1.1.2" "颚式破碎机过载状态判断方法
双气动过载保护系统中离合器气胎内的气压,直接影响其传递的力矩,二者之间的关系可近似表示为:
式中:Tmax表示离合器能传递的最大力矩参数,P表示离合器气胎内气压参数,k表示离合器效率系数,A表示离合器有效作用面积。
在此基础上,对于颚式破碎机过载状态的判断主要是根据离合器滑转工况。当破碎机因过载导致负载力矩超过离合器能传递的最大力矩时,离合器将发生滑转[7]。设实际负载力矩为Tload,最大允许负载力矩为Tmax,则过载判断条件可以表示为:
1.1.3" "确定启动加速度与充气时间关系
在破碎机启动过程中,通过控制充气速度调节启动加速度。启动加速度与充气时间的关系可以表示为:
式中:a表示启动加速度,t表示充气时间,ω表示角速度,I表示系统转动惯量,dV/dt表示充气速率,k'表示与气压和力矩转换相关的系数。
当破碎机发生过载时,通过气控系统使气胎迅速放气,可让离合器脱开,实现过载保护。按照上述流程,实现对颚式破碎机双气动过载保护模型的构建,为后续的控提供执行基础,以确保保护的有效性。
1.2" "基于模糊PID的双气动过载保护控制策略
结合构建的颚式破碎机双气动过载保护模型,本文在开展具体的双气动过载保护控制时,引入了模糊PID,以实现对具体过载状态的精确响应。通过结合模糊控制的灵活性和PID控制的精确性,以应对破碎机工作过程中的复杂性和不确定性。
1.2.1" "模糊集表示方法
模糊PID控制能够根据实时工况动态调整气胎离合器的参数,提高系统的响应速度和稳定性。本文设置模糊PID的输入变量包括过载程度(负载力矩与设定阈值之间的关系)、气压变化率、以及当前系统状态(启动、正常运行、过载)。对应的输出变量为控制信号,即调节气胎离合器气压的信号,以此影响离合器的结合与分离。将输入变量进行模糊化处理,将其映射到模糊集上,具体的模糊集可以表示为:
式中:X表示输入变量对应的模糊集,(NB)、(NM)、(NS)、(ZO)、(PS)、(PM)、(PB)分别表示输入变量显著低于设定值,输入变量低于设定值,输入变量略低于设定值,输入变量与设定值拟合,输入变量略高于设定值,输入变量高于设定值以及输入变量明显高于设定值。
1.2.2" "模糊规则库设置
对于模糊规则库,具体的设置情况如下:如果过载程度PB且气压变化率PB,则输出增加气压PS;如果过载程度NS且系统状态为过载,则输出减少气压NM。
1.2.3" "将输出变量模糊值转换为精确控制信号
在此基础上,根据模糊规则库和当前输入变量的模糊值,进行模糊推理,得到输出变量的模糊值。在模糊集上进行反向映射,将输出变量的模糊值转换为精确的控制信号。具体的处理方式可以表示为
式中:x表示输出变量模糊值转换后对应的精确控制信号,u表示惯量参数,E表示电动机功率参数。
1.2.4" "PID控制参数调整策略
利用模糊推理得到的控制信号,动态调整PID控制器的参数(比例系数Kp、积分系数Ki、微分系数Kd)。其中PID控制参数的具体调整策略可以表示为式中:Kp0、Ki0、Kd0为PID控制器的初始参数,∆Kp、∆Ki、∆Kd为根据模糊推理结果调整的参数增量。将调整后的PID控制参数应用于系统,通过控制气压来实现对颚式破碎机双气动过载保护动作的精准控制。
按照上述的设计,利用模糊PID对颚式破碎机双气动过载保护动作进行精准控制,有效提高过载保护系统的适应性和稳定性。通过模糊化处理、模糊规则库建立、模糊推理、解模糊化以及PID控制参数调整步骤,实现对过载保护动作的动态调整和优化。
2" 测试与分析
2.1" "测试准备
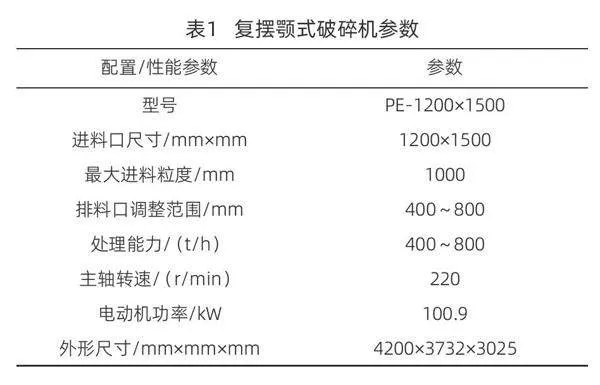
在分析本文设计颚式破碎机双气动过载保护控制方法的应用效果时,以PE-1200×1500型复摆颚式破碎机作为具体测试对象。PE-1200×1500型复摆颚式破碎机结构如图1所示。
结合图1所示的结构配置,确定采取PE-1200×1500型复摆颚式破碎机进行测试,测试工况如下:破碎抗压强度350MPa以下粗碎、中碎矿石或岩石,粒径为500~1800mm。PE-1200×1500型复摆颚式破碎机参数如表1所示。
2.2" "测试方案设计
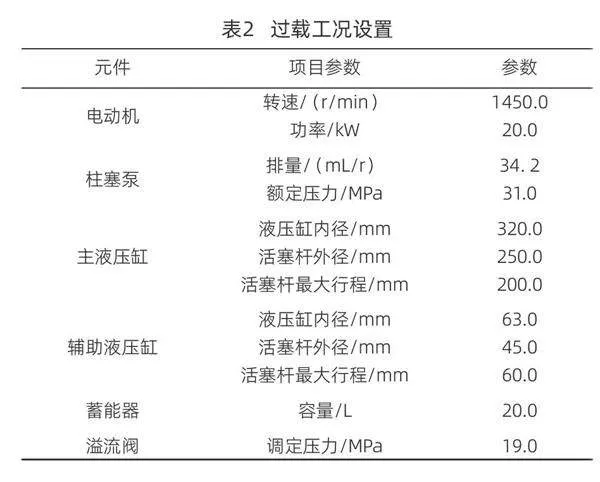
为更加客观地体现设计过载保护控制方法的性能,分别设置文献[3]提出颚式破碎机过载保护优化方法,以及文献[4]提出的以氮气为基础的破碎机过载保护方法,作为测试的对照组。具体过载工况设置如表2所示。在上述工况下,分别实施3种过载保护控制方法,并对主液压缸无杆腔的压力情况进行统计。
2.3" "测试结果与分析
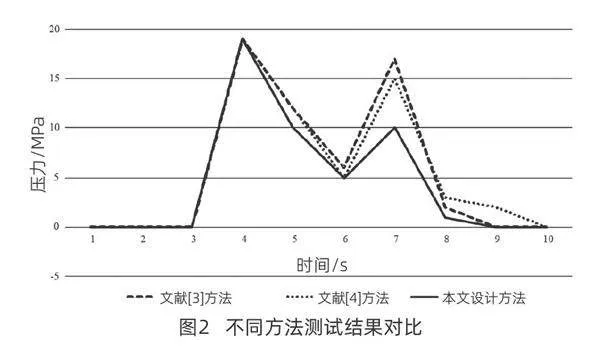
在测试过程中,分别实施了三种过载保护控制方法,并对应主液压缸无杆腔压力变化情况进行统计。之所以选择主液压缸无杆腔的压力作为统计对象,因为在过载工况下其承受着最大的压力冲击,其压力变化情况能够直观地反映出过载保护控制方法的性能。不同方法测试结果对比如图2所示。
结合图2所示的测试结果可以看出,在3种不同方法下,本文设计控制方法对应主液压缸无杆腔压力收敛速度最快,表明其能够实现对过载状态有效响应,作出可靠保护,颚式破碎机能够在过载工况下实现安全运行。
3" 结束语
颚式破碎机过载状态具有差异性,导致单一模式的双气动过载保护难以达到利用的效果,为解决这一问题,本文提出一种基于模糊PID的颚式破碎机双气动过载保护控制方法。利用模糊PID控制通过模糊逻辑对颚式破碎机进行建模,有效处理过载状态下的不确定性和非线性问题,从而实现对颚式破碎机的精确控制。该方法不仅提高了保护的冗余性,还增强了颚式破碎机的整体稳定性和安全性。借助本文的研究,希望在提高生产效率、保障设备安全、降低能耗与成本以及推动技术创新等方面提供参考价值。
参考文献
[1] 孙刚,冉翌正,程蔚,等.基于DEM与FEM的双齿辊破碎机破碎齿磨损及强度研究[J].矿山机械, 2024,52(8):40-45.
[2] 杨硕,闫军,刘志勇.基于DEM-FEM耦合的环锤式破碎机反击板可靠性分析[J].机械设计, 2024,41(7):114-120.
[3] 王爱丽.颚式破碎机过载保护方法分析及优化[J].建筑机械, 2023 (4):78-79+85.
[4] 宋学飞,韩鹏.水泥窑协同处置危废破碎过程中氮气保护的重要性[J].化工管理, 2022(25):77-80.
[5] 杜鹏. ZPG-LC-500×1500齿辊式破碎机结构方案论证及耦合器的选择[J].中国设备工程,2022(14):106-108.
[6] 贾晋光.基于ABAQUS的矿用破碎机中破碎齿及齿环的结构性能研究[J].机械管理开发,2022,37(6):107-109.
[7] 刘红宁,赵磊,李刚,等. PCY-S2020B型破碎机的提产改造实践[J].水泥技术,2022(3):27-30.
(中铁十九局集团矿业投资有限公司, 北京" 100161)
猜你喜欢
山东工业技术(2017年19期)2017-09-27 09:17:23
大陆桥视野·下(2017年7期)2017-09-05 22:40:41
科技创新与应用(2017年16期)2017-06-10 12:05:40
科技创新与应用(2017年16期)2017-06-10 00:27:52
电脑知识与技术(2016年29期)2017-04-27 12:03:22
中国新通信(2017年3期)2017-03-11 09:33:02
科技视界(2016年23期)2016-11-04 11:07:53
山东工业技术(2016年17期)2016-09-23 16:06:10
科技视界(2016年5期)2016-02-22 20:10:30
现代电子技术(2015年11期)2015-07-28 12:55:19