伸缩取栽式水稻钵苗移栽机构设计与试验
2024-12-31 00:00:00张荣榜周誉株徐豪聪孙良俞高红
浙江理工大学学报 2024年9期
关键词:参数优化






摘要: 针对现有夹苗式水稻钵苗移栽机构在取苗时因穴盘中秧苗长度、位置、粗细以及每穴成苗量不一致使得夹苗部位存在差异而导致秧苗直立度降低的问题,设计了一种伸缩取栽式水稻钵苗移栽机构。该机构在到达植苗点推秧时,秧苗土钵相对泥面的上下栽植运动会优先于水平相对运动,保证了秧苗土钵入土的直立性。对该机构开展了目标轨迹设计和结构设计,对非圆齿轮行星轮系和栽植臂伸缩机构进行了运动学分析,结合水稻钵苗移栽的农艺要求确定了优化目标,建立了优化目标数学模型,开发了参数优化辅助设计软件;分析了不同机构参数对移栽轨迹的影响,并通过人机交互的方式得到了一组满足移栽机构工作要求的机构参数。开展了仿真试验和实物样机移栽试验,结果表明:实物样机轨迹、仿真轨迹和理论轨迹基本一致,且试验测量参数与理论参数误差均在2.5%内。该研究提出的伸缩取栽式水稻钵苗移栽机构,降低了泥面对被栽秧苗的水平折弯现象,大幅提高了秧苗的直立度,为水稻钵苗移栽机构在提升秧苗直立度方面的研发提供一种新思路,也可为夹苗式水稻钵苗移栽机的后续研究提供借鉴。
关键词: 水稻钵苗;伸缩取栽;参数优化;运动学分析;移栽试验
中图分类号: S223.2文献标志码: A文章编号: 1673-3851 (2024)09-0651-12
Design and experiment of a telescopic rice pot
seedling transplanting mechanism
ZHANG Rongbanga, ZHOU Yuzhua, XU Haoconga, SUN Lianga,b, YU Gaohonga,b
(a.School of Mechanical Engineering; b.Key Laboratory of Transplanting Equipment and
Technology of Zhejiang Province, Zhejiang Sci-Tech University, Hangzhou 310018, China)Abstract:" Aiming at the problem that the existing seedling-type rice pot seedling transplanting mechanism reduces the uprightness of seedlings due to the inconsistency of seedling length, position, thickness and the amount of seedlings per hole in the tray when people pick up seedlings, a telescopic rice pot seedling transplanting mechanism was designed. When the mechanism reaches the planting point to push the seedlings, the up and down planting movement of the seedling soil bowl relative to the mud surface will take precedence over the horizontal relative movement, which ensures the uprightness of the seedling soil bowl into the soil. The target trajectory design and structural design of the mechanism were carried out. The kinematics analysis of the non-circular gear planetary gear train and the planting arm telescopic mechanism was carried out. The optimization target was determined according to the agronomic requirements of rice pot seedling transplanting. The mathematical model of the optimization target was established, and the parameter optimization aided design software was developed. The influence of different mechanism parameters on the transplanting trajectory was analyzed, and a set of mechanism parameters meeting the working requirements of the transplanting mechanism was obtained through human-computer interaction. The simulation test analysis and physical prototype test of the mechanism were carried out. The test results showed that the trajectory of the physical prototype, the simulation trajectory and the theoretical trajectory were basically the same, and the error between the experimental measurement parameters and the theoretical parameters was within 2.5%. Through the proposed telescopic planting rice pot seedling transplanting mechanism, the horizontal bending phenomenon of the mud surface to the planted seedlings was reduced, and the uprightness of the seedlings was greatly improved. It can not only provide a new research idea for the research and development of rice pot seedling transplanting mechanisms in improving the uprightness of seedlings, but also provide reference for the follow-up research of clip seedling rice pot seedling transplanting machines.
Key words: rice pot seeding; telescopic planting; parameter optimization; kinematic analysis; transplanting experiment
0引言
水稻钵苗移栽技术具有不伤根[1]、返青快、分蘖早[2]、分蘖节位低[3]等特点,可有效提高水稻的品质和产量[4-6],是农业农村部主推的农业技术[7]。水稻钵苗移栽方式主要有抛栽[8-10]、摆栽[11]和移栽。抛栽方式的特点是植苗较浅,秧苗损伤轻,但是抛栽下落秧苗姿态不可控,秧苗直立度相对较差,影响后续秧苗返青及产量;摆栽方式是通过多套机构的前后接力来完成钵苗从秧盘到水田栽植的整个过程,具体动作有“顶”“接”“送”“栽”等,摆栽采用的机械结构比较复杂,尤其是秧苗钵盘使用成本较高,在一定程度上限制了技术的推广[12-14];水稻钵苗移栽方式是用一套移栽机构来完成“夹”“拔”“带”“栽”等系列动作,具有结构简单、作业效率高等特点。
为了实现理想的取苗轨迹和作业姿态,已有研究人员提出了多种类型的水稻钵苗移栽机构。Zhou等[15]提出了一种贝塞尔齿轮轮系水稻钵苗移栽机构,然而该机构齿轮箱最大回转半径过大,会在作业过程中使齿轮箱壳体与水田发生接触,导致秧苗直立度低;赵匀等[16]提出了一种拟合齿轮五杆机构,该机构结构简单、取苗效果好,但是受限于连杆机构的传动特性,该机构不能高速运转,移栽效率较低;叶秉良等[17]提出了一种不完全非圆齿轮行星轮系水稻钵苗移栽机构,然而该机构由于采取了凹凸锁止弧,在高速运转下会产生刚性冲击和振动,导致取苗率低。
综上可知,现有齿轮连杆式或轮系式移栽机构虽然可以较好地完成水稻钵苗的移栽,但均采用夹茎秆拔取来取苗,且穴盘中秧苗长度、位置、粗细以及每穴成苗量等不一致,导致夹苗部位存在差异,致使植苗过程中土钵与泥面接触,产生横向滑动,降低了秧苗的直立度。因此,本文针对该问题,设计了一种伸缩取栽式水稻钵苗移栽机构,以提高秧苗的直立度;对移栽机构进行了运动学分析、参数优化以及仿真实验和实物样机试验,以验证该机构的正确性和可行性。本文可为夹苗式水稻钵苗移栽机构在提升秧苗直立度方面的研发提供新思路。
1伸缩取栽式水稻钵苗移栽机构设计
1.1移栽机构的轨迹设计现有的移栽机构栽植秧苗的运动过程可分为3个阶段,示意图如图1(a)所示。阶段1,秧苗在秧箱中被移栽机构取出后,秧苗在栽植臂夹片的夹持下按照预先设计好的运动轨迹和姿态向下运动;阶段2,当被夹持的秧苗运动到距离秧田表面20 mm高时,由于土钵的高度为20 mm,因此土钵会因为碰撞地面而导致秧苗整体发生一定程度的倾斜;阶段3,秧苗继续向下运转至植苗点时,土钵在倾斜的状态下被机构栽植进秧田,导致秧苗的直立度较差。
本文设计的移栽机构栽植秧苗的运动过程也分为3个阶段,示意图如图1(b)所示。阶段1,秧苗在伸缩取栽式栽植臂的夹持下按照目标轨迹和目标姿态向下运动;阶段2,秧苗在栽植臂的夹持下沿着目标轨迹继续向植苗点运转;阶段3,由于采用了伸缩式栽植,因此移栽机构在植苗点处有一段向下的“尖嘴形”轨迹,若这段轨迹的高度hgt;20 mm,秧苗在运送的过程中就不会碰撞到秧田,会始终以目标姿态完成推秧,且相对于泥面,推秧时秧苗土钵的上下栽植运动会优先于水平相对运动,通过减少秧田对被栽植秧苗的水平折弯现象,提高秧苗的直立度。
1.2移栽机构的结构和工作原理伸缩取栽式水稻钵苗移栽机构的结构示意图如图2(a)所示。该机构由非圆齿轮传动机构和伸缩式栽植臂两部分组成,有7个非圆齿轮和2个栽植臂。太阳轮1固定于机架,第一中间轮2和第二中间轮3与中间轴6固定连接,其中第一中间轮2和太阳轮1相互啮合,第二中间轮与行星轮4相互啮合;行星轮4和栽植臂7固结在行星轴上。机构工作时,由于7个非圆齿轮呈对称布置,所以2个栽植臂所经过的空间位置重合,因此本文取单侧栽植臂的运动进行分析。当移栽机构开始运转时,太阳轮1固定不动,中心轴6带动行星架8转动,动力经由与太阳轮1相互啮合的第一中间轮2传递至围绕同一轴旋转的第二中间轮3,再由第二中间轮3传递至与其相互啮合的行星轮4,行星轮4的动力经由与行星轴5固定的栽植臂7发生转动。
伸缩式栽植臂的结构示意图如图2(b)所示。凸轮10与行星架固定连接,绕着O1点做圆周运动,通过与拨叉11接触,控制前端的左夹片19和右夹片20张开闭合实现取苗和植苗动作。拨叉绕着O2点做往复摆动,拨叉一端与凸轮轮廓接触;另外一端通过拨叉右连杆12和拨叉左连杆13,分别与实心杆16和空心杆18相连,实心杆16套在空心杆18内部。左夹片19和右夹片20分别与空心杆18上端的固定座和夹片左连杆21与夹片右连杆22连接,夹片左连杆21与夹片右连杆22又与推苗块23连接。当拨叉从凸轮GH段运动到AB段时,实心杆16和空心杆18推动弹簧14向后运动压缩弹簧,并带动左夹片19和右夹片20闭合进行取苗;当拨叉从凸轮AB段运动到CD段时,被压缩的弹簧14推动弹簧座15以及空心杆18和实心杆16向前运动,在到达植苗点时左夹片19和右夹片20张开,空心杆18往前探出,实心杆16做推苗动作。GH段为预夹苗段,左夹片19和右夹片20始终处于打开状态,直到下次取秧。最终栽植臂夹片上的尖点运动形成了植苗点以上为“8”字形和植苗点以下为“尖嘴形”的移栽轨迹。
2伸缩取栽式水稻钵苗移栽机构运动学分析
2.1移栽机构的运动学模型以上述伸缩取栽式水稻钵苗移栽机构的单侧为例建立运动学模型。以行星架回转中心O1为机构的坐标原点,建立全局坐标系O1xy(见图2(a))。由于非圆齿轮节曲线为的不规则封闭图形,因此转角φ的范围为[0, 2π]。
2.2栽植臂伸缩机构的运动学分析伸缩机构是伸缩取栽式栽植臂实现植苗点自动伸缩植苗的关键核心执行机构,伸缩机构的设计关系到最终栽植秧苗效果的好坏。本文设计的伸缩机构的结构示意图如图3所示。该机构由两套偏置摆杆滑块机构O2MP和O2NO组合而成,偏置摆杆滑块机构O2MP主要用于控制伸缩式栽植臂空心杆的伸缩,偏置摆杆滑块机构O2NO主要用于控制实心杆向外伸出实现推苗动作,其中图3虚线部分的O2M1P1和O2N1O3为两套偏置摆杆滑块机构在运动到极限位置下的状态。
3伸缩取栽式水稻钵苗移栽机构参数优化
3.1参数优化目标根据水稻钵苗移栽的农艺要求,机构要实现“8”字形的移栽轨迹,需要满足以下7个优化目标[20-22]:a)两栽植臂不干涉;b)取苗角-5°lt;γ1lt;15°;c)推苗角45°lt;γ2lt;65°;d)角度差50°lt;γ3lt;60°;e)轨迹高度H总gt;260 mm且栽植臂形成的尖嘴轨迹高度H3gt;20 mm;f)齿轮箱回转半径大小距地面高度H4gt;20 mm;g)环扣宽度W1gt;30 mm。
将上述的7个参数优化目标转化为数学模型,并利用软件编写计算机辅助可视化界面,通过可视化界面进行目标参数优选,提高了目标参数优化的效率,降低了优化难度。各优化目标数学模型如下。
3.2移栽机构参数优化辅助设计软件
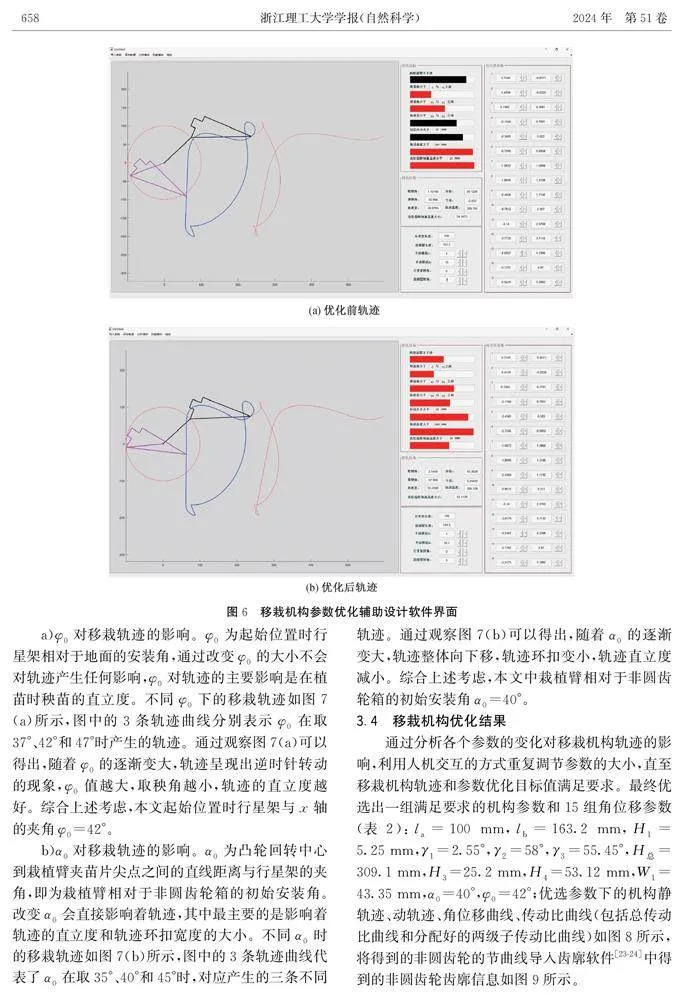
移栽机构的设计涉及着多目标多变量的优化问题,为了方便机构的设计,本文通过Matlab GUI平台开发了的参数优化辅助设计软件,优化前和优化后的轨迹界面如图6所示。
3.3关键参数对移栽轨迹的影响
根据上文的运动学分析可知,移栽机构的轨迹受多个参数影响,而这些参数之间相互关联复杂,导致轨迹优化困难。为了方便后续判定参数的变化对移栽机构轨迹的效果,在轨迹的优化过程中,在调整特定参数时保持其他参数不变,以便探索不同参数对轨迹影响的变化规律。通过这种方法,能快速确定一组符合轨迹优化需求的参数,以缩短轨迹优化所需的时间,提升优化的效率。对伸缩取栽式水稻钵苗移栽机构轨迹影响较大的参数主要有2个:行星架相对于地面的初始相位角φ0和栽植臂相对于行星架的初始安装角α0。
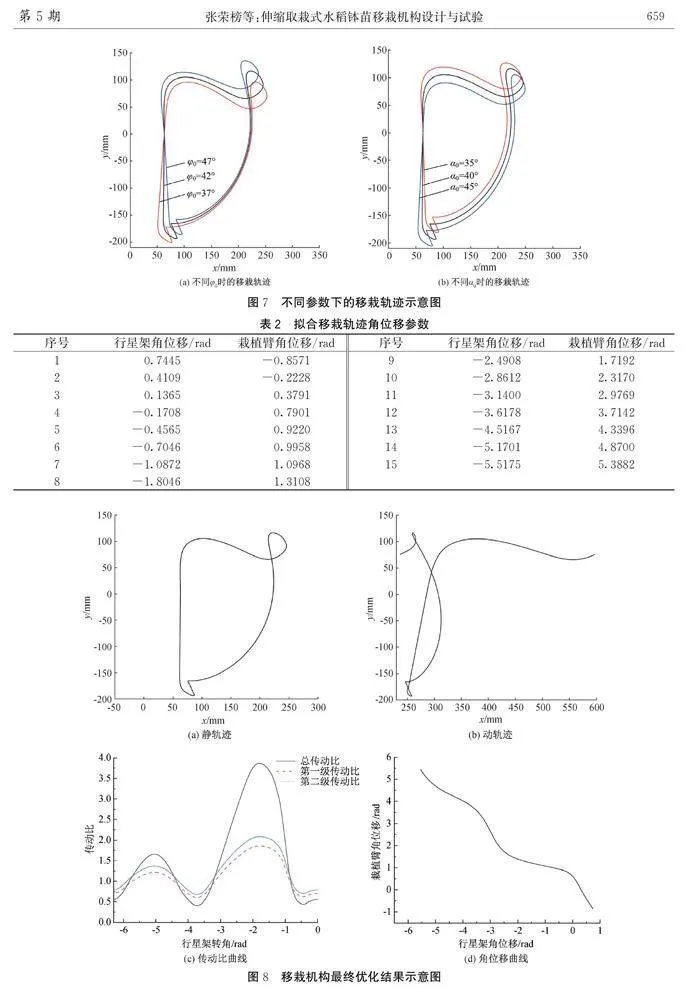
a)φ0对移栽轨迹的影响。φ0为起始位置时行星架相对于地面的安装角,通过改变φ0的大小不会对轨迹产生任何影响,φ0对轨迹的主要影响是在植苗时秧苗的直立度。不同φ0下的移栽轨迹如图7(a)所示,图中的3条轨迹曲线分别表示φ0在取37°、42°和47°时产生的轨迹。通过观察图7(a)可以得出,随着φ0的逐渐变大,轨迹呈现出逆时针转动的现象,φ0值越大,取秧角越小,轨迹的直立度越好。综合上述考虑,本文起始位置时行星架与x轴的夹角φ0=42°。
b)α0对移栽轨迹的影响。α0为凸轮回转中心到栽植臂夹苗片尖点之间的直线距离与行星架的夹角,即为栽植臂相对于非圆齿轮箱的初始安装角。改变α0会直接影响着轨迹,其中最主要的是影响着轨迹的直立度和轨迹环扣宽度的大小。不同α0时的移栽轨迹如图7(b)所示,图中的3条轨迹曲线代表了α0在取35°、40°和45°时,对应产生的三条不同轨迹。通过观察图7(b)可以得出,随着α0的逐渐变大,轨迹整体向下移,轨迹环扣变小,轨迹直立度减小。综合上述考虑,本文中栽植臂相对于非圆齿轮箱的初始安装角α0=40°。
3.4移栽机构优化结果
图8移栽机构最终优化结果示意图图9非圆齿轮节曲线及齿廓示意图4伸缩取栽式水稻钵苗移栽机构试验分析4.1仿真试验根据参数优化得到的非圆齿轮齿廓线信息及运动学分析得到的栽植臂伸缩机构等设计参数,在三维建模软件完成伸缩取栽式水稻钵苗移栽机构的整体结构设计,并将设计好的伸缩取栽式水稻钵苗移栽机构模型导入ADAMS,进行虚拟样机仿真,以验证三维模型设计的正确性。伸缩取栽式水稻钵苗移栽机构的仿真轨迹与理论轨迹如图10所示,将伸缩取栽式栽植臂夹苗片尖点轨迹导出,并与理论模型轨迹进行对比。从图10可以看出,仿真轨迹与理论轨迹基本相同,仅在虚线圈处有局部区别。这是因为机构在处于预夹苗状态时,栽植臂向外略微伸出,使得栽植臂的长度变长,属于正常范围内误差。这表明伸缩取栽式水稻钵苗移栽机构结构设计和理论分析正确。
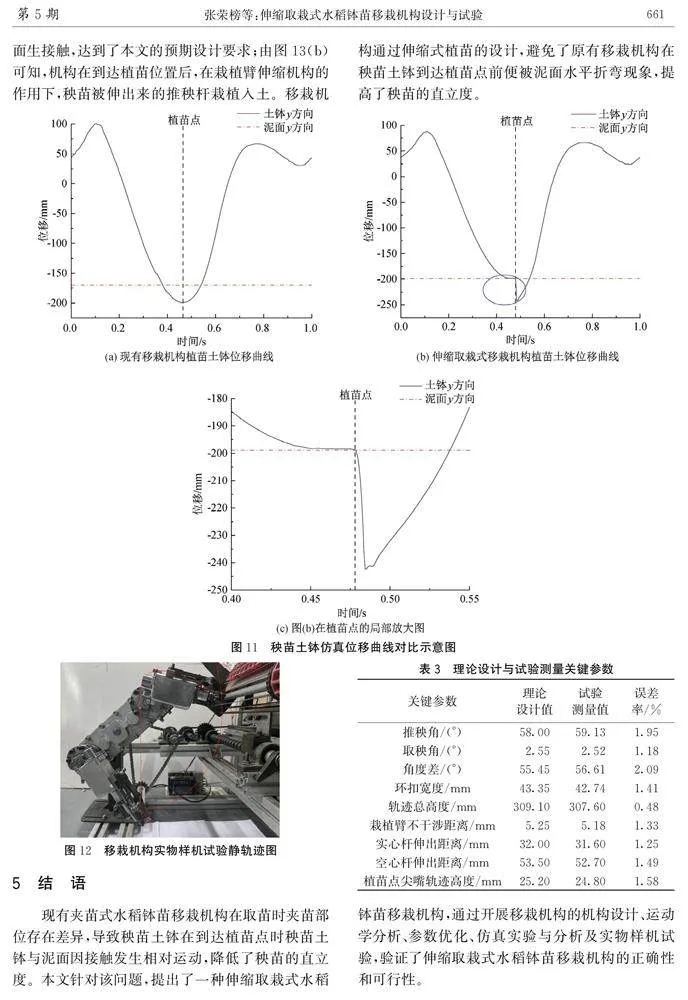
图10伸缩取栽式水稻钵苗移栽机构的仿真轨迹与理论轨迹示意图秧苗土钵一个完整周期的仿真位移曲线如图11所示。图11(a)为目前移栽机构植苗位移曲线图,由图可知,秧苗土钵在到达植苗点之前便低于泥面,因此秧苗土钵便会与泥面发生碰撞而导致土钵倾斜,使得栽植的秧苗直立度较差。图11(b)为本文设计的伸缩取栽式水稻钵苗移栽机构植苗位移曲线图,图11(c)为伸缩取栽式水稻钵苗移栽机构植苗位移曲线图在植苗点处的局部放大图,从图中可以看出:在植苗点时秧苗始终位于泥面之上,且在到达植苗点后,秧苗被迅速栽植入田,避免了秧苗土钵在植苗点之前与泥面发生碰撞接触。这表明本文设计的移栽机构避免了原有机构经过植苗点时泥面对被栽苗的水平折弯现象,提高了秧苗的直立度。
4.2实物样机试验为了进一步验证伸缩取栽式水稻钵苗移栽机构的正确性和可行性,加工了移栽机构的实物样机,并将其装配在试验台上开展台架试验。利用高速摄像机拍摄伸缩取栽式水稻钵苗移栽机构的完整工作周期的运转过程,并利用分析软件获得了移栽机构夹苗片尖点的运动轨迹,如图12所示。通过与理论轨迹对比可知,静轨迹基本一致。
理论设计与试验测量的机构关键参数如表3所示,由表可知,移栽机构的静轨迹推秧角、取秧角、角度差、环扣宽度、轨迹总高度、栽植臂不干涉距离、植苗点尖嘴轨迹高度、栽植臂实心杆和空心杆伸出距离误差均在2.5%之内,故均满足设计要求。
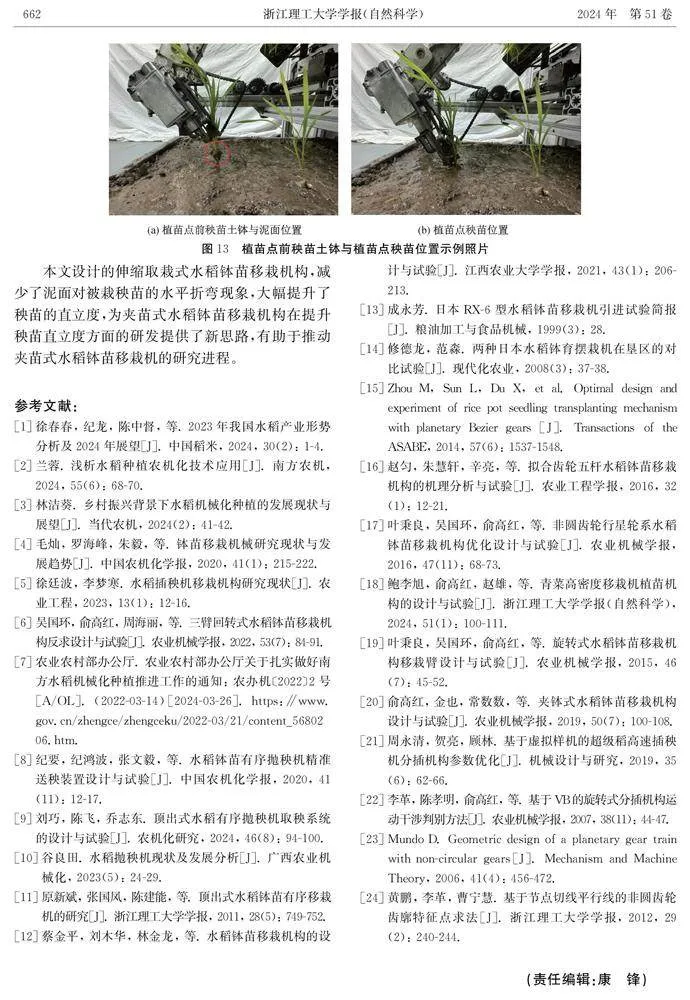
植苗点前秧苗土钵与植苗点秧苗位置示例照片如图13所示。由图13(a)可知,秧苗土钵在到达植苗点之前即将伸出推苗位置时,秧苗土钵并未与泥面生接触,达到了本文的预期设计要求;由图13(b)可知,机构在到达植苗位置后,在栽植臂伸缩机构的作用下,秧苗被伸出来的推秧杆栽植入土。移栽机构通过伸缩式植苗的设计,避免了原有移栽机构在秧苗土钵到达植苗点前便被泥面水平折弯现象,提高了秧苗的直立度。
5结语
现有夹苗式水稻钵苗移栽机构在取苗时夹苗部位存在差异,导致秧苗土钵在到达植苗点时秧苗土钵与泥面因接触发生相对运动,降低了秧苗的直立度。本文针对该问题,提出了一种伸缩取栽式水稻钵苗移栽机构,通过开展移栽机构的机构设计、运动学分析、参数优化、仿真实验与分析及实物样机试验,验证了伸缩取栽式水稻钵苗移栽机构的正确性和可行性。
本文设计的伸缩取栽式水稻钵苗移栽机构,减少了泥面对被栽秧苗的水平折弯现象,大幅提升了秧苗的直立度,为夹苗式水稻钵苗移栽机构在提升秧苗直立度方面的研发提供了新思路,有助于推动夹苗式水稻钵苗移栽机的研究进程。
参考文献:
[1]徐春春, 纪龙, 陈中督, 等. 2023年我国水稻产业形势分析及2024年展望[J]. 中国稻米, 2024, 30(2): 1-4.
[2]兰蓉. 浅析水稻种植农机化技术应用[J]. 南方农机, 2024, 55(6): 68-70.
[3]林洁葵. 乡村振兴背景下水稻机械化种植的发展现状与展望[J]. 当代农机, 2024(2): 41-42.
[4]毛灿, 罗海峰, 朱毅, 等. 钵苗移栽机械研究现状与发展趋势[J]. 中国农机化学报, 2020, 41(1): 215-222.
[5]徐廷波, 李梦寒. 水稻插秧机移栽机构研究现状[J]. 农业工程, 2023, 13(1): 12-16.
[6]吴国环, 俞高红, 周海丽, 等. 三臂回转式水稻钵苗移栽机构反求设计与试验[J]. 农业机械学报, 2022, 53(7): 84-91.
[7]农业农村部办公厅. 农业农村部办公厅关于扎实做好南方水稻机械化种植推进工作的通知: 农办机〔2022〕2号[A/OL]. (2022-03-14)[2024-03-26]. https:∥www.gov.cn/zhengce/zhengceku/2022-03/21/content_5680206.htm.
[8]纪要, 纪鸿波, 张文毅, 等. 水稻钵苗有序抛秧机精准送秧装置设计与试验[J]. 中国农机化学报, 2020, 41(11): 12-17.
[9]刘巧, 陈飞, 乔志东. 顶出式水稻有序抛秧机取秧系统的设计与试验[J]. 农机化研究, 2024, 46(8): 94-100.
[10]谷良田. 水稻抛秧机现状及发展分析[J]. 广西农业机械化, 2023(5): 24-29.
[11]原新斌, 张国凤, 陈建能, 等. 顶出式水稻钵苗有序移栽机的研究[J]. 浙江理工大学学报, 2011, 28(5): 749-752.
[12]蔡金平, 刘木华, 林金龙, 等. 水稻钵苗移栽机构的设计与试验[J]. 江西农业大学学报, 2021, 43(1): 206-213.
[13]成永芳. 日本RX-6型水稻钵苗移栽机引进试验简报[J]. 粮油加工与食品机械, 1999(3): 28.
[14]修德龙, 范淼. 两种日本水稻钵育摆栽机在垦区的对比试验[J]. 现代化农业, 2008(3): 37-38.
[15]Zhou M, Sun L, Du X, et al. Optimal design and experiment of rice pot seedling transplanting mechanism with planetary Bezier gears [J]. Transactions of the ASABE, 2014, 57(6): 1537-1548.
[16]赵匀, 朱慧轩, 辛亮, 等. 拟合齿轮五杆水稻钵苗移栽机构的机理分析与试验[J]. 农业工程学报, 2016, 32(1): 12-21.
[17]叶秉良, 吴国环, 俞高红, 等. 非圆齿轮行星轮系水稻钵苗移栽机构优化设计与试验[J]. 农业机械学报, 2016, 47(11): 68-73.
[18]鲍李旭, 俞高红, 赵雄, 等. 青菜高密度移栽机植苗机构的设计与试验[J]. 浙江理工大学学报(自然科学), 2024, 51(1): 100-111.
[19]叶秉良, 吴国环, 俞高红, 等. 旋转式水稻钵苗移栽机构移栽臂设计与试验[J]. 农业机械学报, 2015, 46(7): 45-52.
[20]俞高红, 金也, 常数数, 等. 夹钵式水稻钵苗移栽机构设计与试验[J]. 农业机械学报, 2019, 50(7): 100-108.
[21]周永清, 贺亮, 顾林. 基于虚拟样机的超级稻高速插秧机分插机构参数优化[J]. 机械设计与研究, 2019, 35(6): 62-66.
[22]李革, 陈孝明, 俞高红, 等. 基于VB的旋转式分插机构运动干涉判别方法[J]. 农业机械学报, 2007, 38(11): 44-47.
[23]Mundo D. Geometric design of a planetary gear train with non-circular gears[J]. Mechanism and Machine Theory, 2006, 41(4): 456-472.
[24]黄鹏, 李革, 曹宁慧. 基于节点切线平行线的非圆齿轮齿廓特征点求法[J]. 浙江理工大学学报, 2012, 29(2): 240-244.
(责任编辑:康锋)
猜你喜欢
电脑知识与技术(2016年31期)2017-02-27 15:37:15
筑路机械与施工机械化(2016年11期)2017-02-05 20:54:02
科教导刊·电子版(2016年30期)2016-12-26 16:43:00
电脑知识与技术(2016年24期)2016-11-14 02:03:09
科技视界(2016年23期)2016-11-04 08:17:36
中国科技博览(2016年6期)2016-04-25 16:13:51
中国科技博览(2016年7期)2016-04-25 05:58:34
计算技术与自动化(2015年4期)2016-03-25 17:43:27
哈尔滨理工大学学报(2015年5期)2016-01-19 00:07:13
现代电子技术(2015年18期)2015-09-16 21:56:51