基于VOF⁃DPM 模型的明渠含沙数值模拟及量水方案比选
2024-12-31 00:00:00唐渊马文波温红艳王国强申丽霞吴建华张玉胜成一雄
人民黄河 2024年11期


摘 要:为探究含沙水流对明渠流量测量精度的影响,基于Fluent 软件采用VOF-DPM 模型对明渠进行数值模拟,分别模拟不同进口流速和含沙量组合条件下渠道内流量、液位及泥沙颗粒分布,并将数值模拟结果与试验结果进行对比分析,计算出各量水设施的流量误差与液位误差。结果表明:采用VOF-DPM 模型可以较好地模拟含沙水流在明渠的流态,通过开展不同流量级的流量测试可知,在不同含沙量条件下,巴歇尔槽流量计误差最小(-3%~1%),超声流量计(-4%~3%)和电磁流量计( -9%~2%)量测效果均较好,雷达流量计误差较大(-20%~4%),说明非接触式流量计在高含沙量、大流量的情况下需进一步提高测量精度;超声液位、电磁液位与雷达液位误差均较大,试验中尾部巴歇尔槽壅水以及泥沙在渠道底部淤积是造成较大液位误差的原因之一。
关键词:数值模拟;VOF-DPM 模型;含沙量;测流精度
中图分类号:TV93 文献标志码:A doi:10.3969/ j.issn.1000-1379.2024.11.020
引用格式:唐渊,马文波,温红艳,等.基于VOF-DPM 模型的明渠含沙数值模拟及量水方案比选[J].人民黄河,2024,46(11):126-132,148.
0 引言
灌区量水是灌区水资源优化配置和现代化管理的基本手段,是提高灌溉水有效利用系数的重要途径[1] 。目前的量水方法包括建筑物和设备型量水两大类。各种量水方法都有其特定的适用范围和条件,例如:巴歇尔槽量水精度高、适用范围大、观测方便,但结构复杂、造价较高,且会影响渠道过水能力;超声流量计测量精度高、操作简便、安装方便、智能化程度高,但水位变化较大、水深较深、流态复杂的断面布设多层测速声路成本较高;电磁流量计精度高、测量范围广、压力损失小、结构简单、易维护,但测量精度易受外部磁场干扰,同时对液体介质的导电性有一定要求;雷达流量计适用范围广、抗干扰能力强,不受流体性质、温度、压力等因素影响,但安装和使用复杂且成本较高。因此,应根据灌区基本情况、量水精度要求、渠道水力边界条件,确定相应的量水方法和量水设施具体型号[2] 。在明渠测流中,水体含沙是一个关键问题,水体中的泥沙会对量水设备的测量精度产生不同程度的影响,因此开展泥沙对量水设备测量精度的影响研究、优化量水设备性能、提升测量精度有重要意义。
1 概述
国内外学者过去主要集中在清水条件下对量水设备测流精度进行研究,关于泥沙或水中杂质对测流设备潜在影响的研究相对较少,例如:范恬等[3] 利用横向摆杆提出一种基于流速面积法的明渠测流方法,结果表明该测流方法的测流精度符合取水计量的规定且横向摆杆装置对流场的扰动较小;鲍子云等[4] 将不同流量测箱与标准流量计在不同工况条件下的测量结果进行对比分析,结果表明超声、压力液位流量测箱能在不同工况下工作且精度较高;万里等[5] 设计了一种基于弹簧形变量与渠道过水断面瞬时流量之间关系的明渠测流装置,拟合得到弹簧板式测流装置的流量公式,计算流量与试验时的实测流量吻合;王宝贺等[6] 提出了一种非接触式流量计算方法,结果表明基于该流量系数的计算流量与实测流量十分接近;Zhou 等[7] 研究发现提高电磁流量计传感器磁场激励的均匀性可以提高电磁流量计的测量精度;王宝贺等[8] 研究发现GABP神经网络仅需4 个特定位置(测点)流速即可得到满足精度的计算结果,实现对明渠测点数量的优化,保证测流精度;Shi 等[9] 研究提出了一种基于AIN 压电微机械超声换能器(PMUTs)的高精度双通道超声流量计,用于测量小口径管道中的流量。近年来,人们开始重点研究泥沙或水中杂质对设备测流的影响,例如:段炎冲等[10] 研究了含沙量对明渠超声时差法测流精度的影响,结果表明超声时差法流量计的测量值偏大,且偏差随含沙量增大呈增大趋势。
Fluent 是一个用于模拟和分析在复杂几何区域内的流体流动的专用CFD 软件[11] 。在明渠水流动模拟中通常使用的多相流模型是VOF 模型,模拟水中泥沙颗粒则需要借助离散相模型(Discrete Phase Model)在Lagrangian 坐标下模拟流场中离散的第三相。本文基于Fluent 软件和VOF-DPM 模型对明渠进行数值模拟的结果(不同入口流速和含沙量组合条件下渠道内流量、液位及泥沙颗粒分布等),将数值模拟数据与试验数据进行对比分析,计算得出各量水设施的流量误差与液位误差,分析其分布规律,以期为明渠含沙水流条件下量水装置的选择提供技术支撑。
2 VOF-DPM 模型
VOF-DPM 模型依赖于两种或多种流体互不渗透这一前提,对模型中的每一相引入体积分数,并以此作为求解变量。在每个控制体积内,所有相的体积之和等于1。全部特性参数和变量的场由各相共享,且这些场的值代表了整个系统内体积平均值[12] 。根据控制体积内各相的体积分数,控制体积被赋予适当的特性和变量值。
1)体积分数方程:
式中:ρq 和αq 分别为第q 相的密度和体积分数(q =1,2,…,n);t 为时间;u 为混合流体速度;∇为散度算子;n 为多相流中流体种类数目,即相数;Sq 为源项,可以通过用户自定义方式指定,缺省条件下为0;mp1q 为从相p1 到相q 的传质;mqp1为从相q 到相p1 的传质。
2)动量方程:
式中:ρ 为混合流体密度,μ 为混合流体动力黏度,p2为混合流体压力,g 为重力加速度,FSV 为表面张力的等价体积力。
3)能量方程(密度ρ、有效导热系数keff、有效黏度τeff各相共用,按各相的体积平均计算):
式中:Sh 为源项(包括热辐射及其他体积热源的贡献),Jj 为组分j 的扩散通量,E 为各相能量的质量加权平均能量,T 为温度,hj 为组分j 的焓。
离散相模型(Discrete Phase Model, DPM)属于欧拉-拉格朗日方法的一种,用于求解带有颗粒(泥沙颗粒、水滴或气泡)的流体流动问题。由于不考虑颗粒与颗粒之间的相互作用,因此一般用于颗粒体积浓度低于10%、颗粒外观较清晰,颗粒与流体的相互作用比较明确的场合。颗粒相控制方程为
式中:p 为颗粒的参数,mp 为颗粒质量,up 为颗粒速度,FD 为曳力,FB 为重力造成的浮力,F 为颗粒受到的除曳力和重力造成的浮力外的其他力,FVM 为虚拟质量力,FP 为压力梯度力,FR 为旋转系统中存在的哥氏力和离心力,FM 为马格努斯升力,FS 为萨夫曼升力,FBA为Basset 力。
3 试验研究
3.1 试验系统
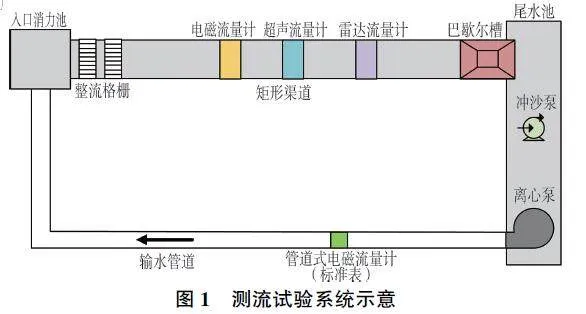
本次测流试验在室内自循环明渠试验水槽中进行,水槽由入口消力池、矩形渠道、尾水池和输水管道4 个部分构成(见图1)。入口消力池可以使下泄急流迅速变为缓流,消力池之后为矩形渠道(渠道长33 m、宽0.6 m、深0.7 m,坡降为1‰)。为保证水流流动稳定,最上游的箱式电磁流量计布置在距入口14 m 处,箱式电磁流量计之后沿渠道每隔2 m 依次布置超声流量计与雷达流量计。在明渠末端布设标准小型5 号巴歇尔槽,矩形渠道之后为尾水池,尾水由离心泵通过输水管道回流至入口消力池。为减少泥沙在池中淤积,尾水池中放置冲沙泵来清理泥沙。回水管道为直径0.4 m 的圆管,管道上布设内径为0.4 m的管道式电磁流量计,经检测在清水条件下示值误差为0.42%、测量精度0.5 级。研究发现管道式电磁流量计不受介质及杂质的影响并可保证高精度量测,因此可将清水标定结果应用于浑水流量测试[12](试验通过变频器控制离心泵的转速,从而控制和调节流量)。
3.2 试验步骤
为了较全面地分析泥沙对明渠量水设备的影响,开展了不同含沙量下不同流量级的测量试验。试验采用宁夏引黄灌区的天然沙样作为试验用沙,试验用沙粒径为0.019 mm。在此基础上进行了5 个量级含沙量试验,含沙量S 为0(清水)、5、10、15、20 kg/ m3,每级含沙量下均开展5 级流量(Q≈370、550、710、870、1 010 m3 / h)测试,利用水泵变频器调节频率来实现5个流量变化(管道式电磁流量计为满管流,将各瞬时实测流量等价为相应入口流速进行后续Fluent 软件速度入口设置)。
为了便于试验,按以下步骤进行:1) 清水试验。通过调节水泵变频器频率实现5 个不同量级流量变化,每级流量设定试验时间60 min。2) 含沙水流试验。依据之前设计好的4 个量级含沙量(不含清水),将提前称量好的泥沙分批次倒入水池中,待泥沙搅拌均匀后开始测流,依次调节水泵变频器频率完成不同流量级的试验。3)重复步骤2)完成不同含沙量、流量级的试验。每个流量级设定试验时间60 min,每级沙含量对应5 个流量级,共计20 组试验。计算机自动采集各设备的实时水位、流量、流速等数据,采样频率为2 s 一次。含沙水流试验每级流量均进行含沙水样采集,以计算水体含沙量。尾水池的冲沙泵始终保持运行以保证不同流量级泥沙含量数据的一致性。
4 数值模拟
4.1 几何建模
通过试验资料可查得试验断面几何形状为矩形渠道,渠道高为0.7 m、宽为0.6 m、长为14 m。根据《明渠实流法流量比对现场检测规程》(T/ CIDA 0014—2022)的规定,上游顺直段长度应大于被测断面最大液位的20 倍,由实测数据得被测断面最大液位(水深)为0.623 m,由此可知渠道长取14 m 满足水流流态稳定的要求;入口管道为直径0.4 m 的圆管,管道内为满管流,因此将其简化为一个面。
4.2 网格划分
本次模拟使用ANSYS 的mesh 软件进行网格划分,并对几何的各部分进行定义。本次数值模拟对象为矩形渠道,结构简单,使用结构化网格划分,提高精度,减少网格数量,提高计算效率。采用Multizone 方法进行均匀化网格划分,网格数量一共为133 756 个,网格质量较好。
4.3 Fluent 计算
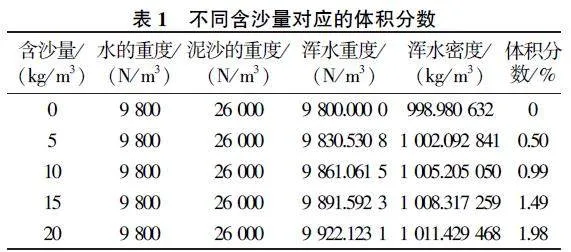
为了使结果更贴合实际,采用Fluent 软件模拟明渠内部流场及外部特性。将模型导入Fluent 软件中,设置多相流模型为VOF 模型(加水和空气),并添加离散相模型(研究气液固三相流),含沙量分别为0、5、10、15、20 kg/ m3,颗粒直径为0.019 mm,其分别对应的体积分数见表1。
湍流模型设为标准k-epsilon 模型,此模型在满足计算效率的前提下满足相应的计算精度,广泛应用于黏性模拟,壁面函数选取标准壁面函数(SWF)。定义边界条件,流体在竖直y 方向的重力加速度为9.81 m/ s2,进口设置为速度入口,入口速度根据实测数据分别设定,离散相模型的壁面条件(Boundary Condition Type)选择escape 颗粒逃逸;上表面设置为压力进口,压力为一个大气压;出口设置为压力出口,渠道边壁设置为标准固定无滑移壁面,粗糙度常数设置为0.013。求解算法设置为基于压力基的PISO 算法,其包括预测—修正—再修正3 个步骤,在本次模拟明渠含沙水流瞬态三维流动过程中,无论计算精度还是计算时间都具有一定优势。空间离散中的压力差值采用Body Force Weighted(体积力加权压力)插值,其余差值均使用精度更高的二阶迎风格式,从全局对其进行初始化设置:步数为6 000 步,时间步长为0.05 s。
5 结果分析
5.1 同一含沙量不同流量
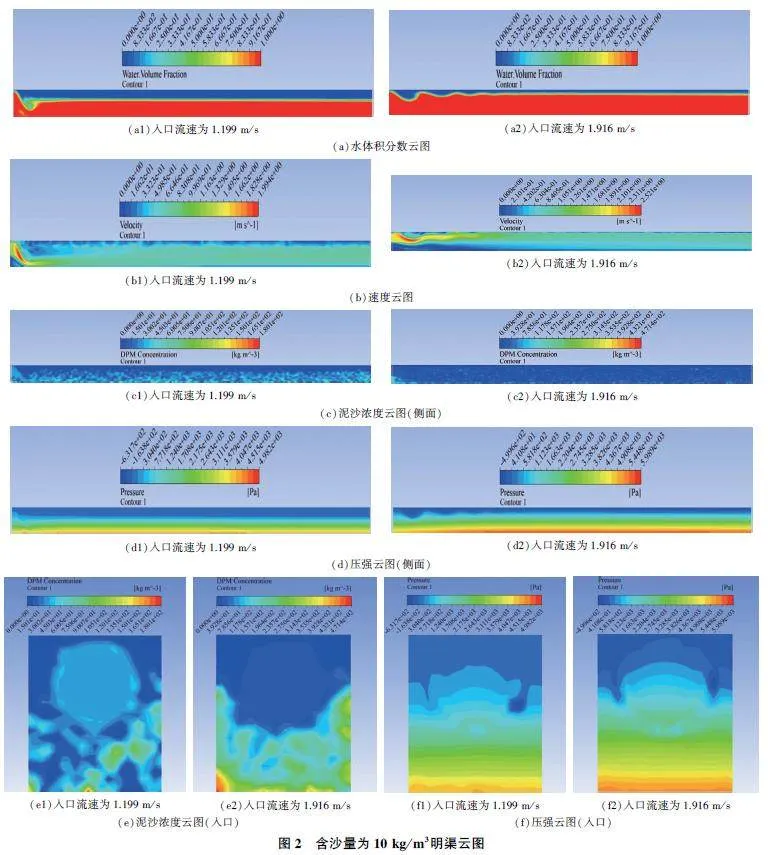
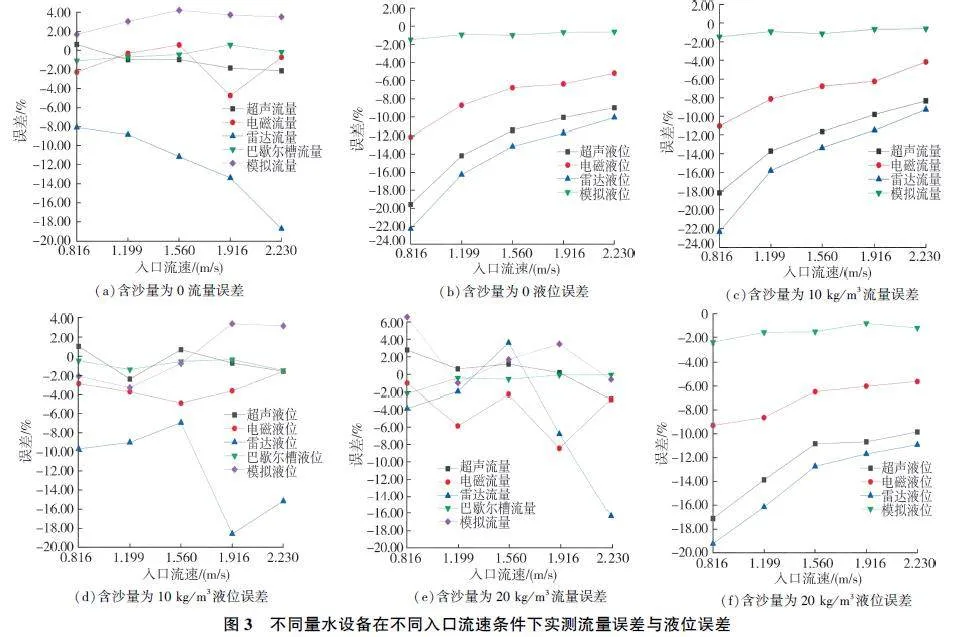
以含沙量10 kg/ m3为例,分别对实测入口速度0.816、1.199、1.560、1.916、2.230 m/ s 进行数值模拟,并以速度1.199、1.916 m/ s 为例研究渠道水体积分数、流速、压强及泥沙浓度的变化(见图2)。
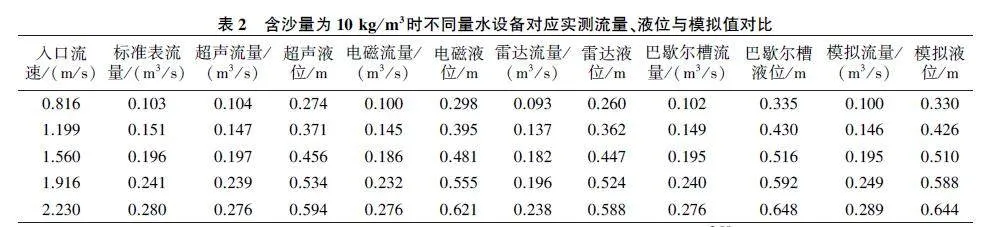
由图2(a)可知,红蓝交界处为水气交界面,水面上方蓝色区域为空气,水面下方红色区域为水,随着入口流速的增大,稳定后的液位上升,模拟水流流态符合实际水流流态,水面线平稳,水位与实际水位一致;由图2(b)可知,入口后方水低流速区面积增大,涡流现象加剧;由图2(c)(e)可知,随着入口流速的增大,水中泥沙浓度下降,底部泥沙浓度比上方泥沙浓度大,入口处泥沙沉积较多;由图2(d)(f)可知,随着入口流速的增大,底部压强增大,渠底压强分布较为均匀。以标准表流量与巴歇尔槽液位为基准,将模拟流量、液位等数据与实测数据进行对比(见表2);同时,对含沙量0、10、20 kg/ m3三种工况计算不同量水设备实测流量误差与液位误差(见图3)。
由图3(a)(c)(e)可知,在含沙量一定的情况下,随着入口流速的增大,超声流量计流量测量误差在±3%以内,量测精度较高;电磁流量计测量误差在-9%~2%范围内波动,量测效果较好;雷达流量计误差则较大,误差为-20%~4%,且随着入口流速的增大呈逐渐递增的趋势,这说明非接触式流量计在高含沙量、大流量的情况下需要进一步提高测量精度;巴歇尔槽流量计总体误差最小,误差为-3% ~1%,量测效果较好,验证了传统量水堰槽的可靠性。
由图3(b)(d)(f)可知,在含沙量一定的情况下,随着入口流速的增大,超声液位、电磁液位与雷达液位总体误差均较大,电磁液位误差为-12% ~ -4%,超声液位与雷达液位误差为-23% ~ -8%。试验中尾部巴歇尔槽壅水以及泥沙在渠道底部的淤积是造成较大液位误差的原因之一。
5.2 同一流量不同含沙量
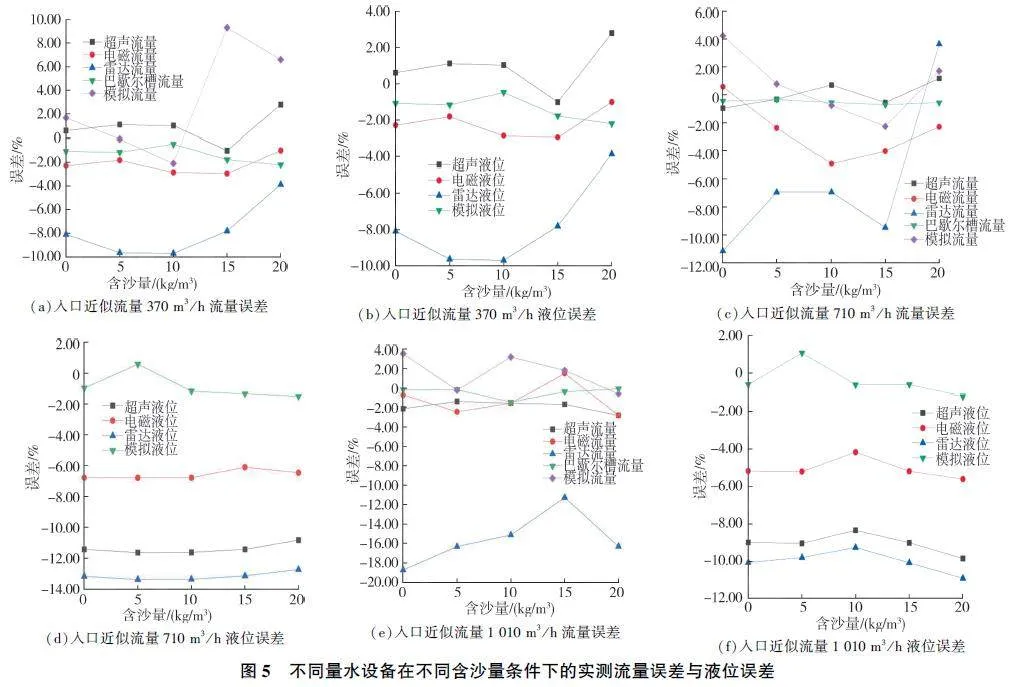
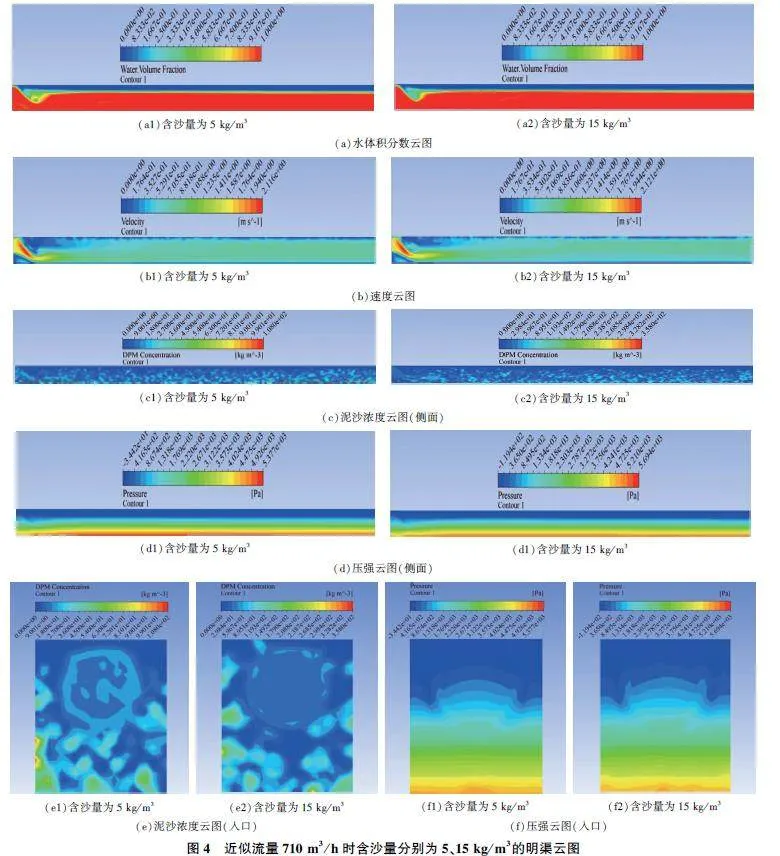
由于实测数据是基于不同含沙量分批进行试验所得,无法在同一时刻对多种含沙水流工况进行试验,因此此处以近似流量710 m3 / h 为例,分别对含沙量0、5、10、15、20 kg/ m3 进行数值模拟, 并以含沙量5、15kg/ m3为例研究渠道水体积分数、流速、压强及泥沙浓度的变化,如图4 所示。
由图4(a)可知,在初始时刻入口处水流受到重力的作用使得渠道内水的体积分数锐减,水面线逐渐下降并产生略微波动;随着水流继续在渠道中流动水面线逐渐趋于平稳,含沙量为5、15 kg/ m3的水面线在稳定后高度一致。由图4(b)可知,含沙量为5、15 kg/ m3 的渠道内速度分布较为接近。由图4(c)(e)可知,随着含沙量增大,泥沙浓度增加,边壁与渠底的泥沙浓度大于水中的泥沙浓度。由图4(d)(f)可知,随着含沙量增大,渠底部压强降低,入口处渠底压强低于渠道中后部的压强,渠道中后部压强分布较为均匀。以标准表流量与巴歇尔槽液位为基准,将近似流量为710 m3 / h 的模拟流量、液位等数据与实测数据进行对比,具体见表3。同时,对近似流量为370、710、1 010 m3 / h 三种工况计算不同量水设备实测流量误差与液位误差,具体见图5。由图5(a)(c)(e)可知,在入口近似流量一定情况下,随着含沙量增大,超声流量计流量测量误差为-4%~3%,量测精度较高;电磁流量计流量测量误差在-6% ~2%之间波动,量测效果较好;雷达流量计误差则较大,误差为-20%~4%,且随着入口流量的增大呈逐渐递增趋势;巴歇尔槽流量计总体误差最小,误差为-2%~0%,量测效果较好。
由图5(b)(d)(f)可知,在入口流量一定的情况下,随着含沙量增大,超声液位、电磁液位与雷达液位误差均较大,电磁液位误差为-8% ~0%、超声液位误差为-12%~3%、雷达液位误差为-14%~-3%。
6 结论
1)数值模拟结果表明,采用VOF-DPM 模型可以较好地模拟含沙水流在明渠的流态。
2)通过开展不同流量级的流量测量试验可知,在不同含沙量条件下,巴歇尔槽流量计量总体误差最小、量测效果较好、体现了传统量水堰槽的可靠性,超声流量计和电磁流量计量测效果均较好,雷达流量计误差较大,说明非接触式流量计在高含沙量、大流量的情况下需要进一步提高测量精度;超声液位、电磁液位与雷达液位误差均较大,试验中尾部巴歇尔槽壅水以及泥沙在渠道底部淤积是造成较大液位误差的原因之一,高含沙条件下先进行的试验在最大流量情况下将泥沙充分混合,切换到小流量时导致部分泥沙沉积。
3)本研究可为数字孪生灌区建设、灌区明渠量水及分离式测控一体化闸门量水设备的合理选取,提供一定的理论依据和技术支持。
参考文献:
[1] 邵帅超,章少辉,张凯,等.灌区量测水方法与技术研究进展[J].节水灌溉,2023(9):1-7.
[2] 张义强,刘惠忠,付国义.灌区量水实用手册[M].北京:中国水利水电出版社,2016:4-5.
[3] 范恬,周义仁.横向摆杆式明渠测流方法在矩形渠道中的应用研究[J].节水灌溉,2022(1):62-66,73.
[4] 鲍子云,王洁,李王成,等.明渠非满管电磁流量测箱测试评价[J].排灌机械工程学报,2022,40(5):482-487.
[5] 万里,李永业,张港,等.弹簧板式明渠测流装置的水力特性[J].排灌机械工程学报,2022,40(12):1241-1247.
[6] 王宝贺,王竹青,苏沛兰,等.基于水面一点法的明渠流量计算方法研究[J].节水灌溉,2023(5):109-113,121.
[7] ZHOU F,YANG Q F,LIN K. Evaluation Index and Perform⁃ance Structure Optimization of Magnetic Field Uniformity of Complex Multiphase Flow Electromagnetic Current Meter [J].Measurement and Control,2022,55(1-2):62-71.
[8] 王宝贺,苏沛兰,吴建华,等.基于GA-BP 神经网络的明渠流速测点优化研究[J].人民黄河,2023,45(12):117-123.
[9] SHI L J,QU M J,Lyu D Z,et al.A Two⁃Channel Ultrasonic Flowmeter Based on AlN Piezoelectric Micromachined Ul⁃trasonic Transducers Arrays with Improved Cross⁃Correlation Method[J].Journal of Micromechanics and Microengineering,2023,33(12):7-8.
[10] 段炎冲,杨郁挺,王忠静,等.含沙量对明渠超声时差法测流精度的影响[J/ OL].水力发电学报,1-12[2024-05-11]. http:// kns. cnki. net/ kcms/ detail/11. 2241. TV.20221208.1811.002.html.
[11] 王福军.计算流体动力学分析[M].北京:清华大学出版社,2014:21-22.
[12] 陆力,徐洪泉,孟晓超,等.浑水条件下水头及流量测量方法探讨[J].水电站机电技术,2017,40(5):1-6,100.
【责任编辑 简 群】
基金项目:山西省基础研究计划(自由探索类)项目(20210302123169,202203021212271);山西省高等学校科技创新项目(2021L020,2022L033);太原理工大学校级科学研究基金项目(2022QN055);2023 年度山西省研究生教育教学管理改革项目(2023JG031)
猜你喜欢
童话王国·奇妙逻辑推理(2024年5期)2024-06-19 16:03:38
中学生数理化·七年级数学人教版(2020年10期)2020-11-26 08:24:50
浙江水利科技(2020年4期)2020-08-02 14:01:06
数学物理学报(2020年2期)2020-06-02 11:29:24
光学精密工程(2016年6期)2016-11-07 09:07:19
科技视界(2016年18期)2016-11-03 20:38:17
中国科技博览(2016年18期)2016-10-19 09:40:28
科技视界(2016年22期)2016-10-18 14:53:19
科技视界(2016年20期)2016-09-29 11:08:27
应用海洋学学报(2014年2期)2014-11-26 01:20:40