
基于V2X的车联网实验系统设计与实现
2024-12-18 00:00:00杨一桐吴菁晶张立立
现代电子技术 2024年24期


摘" 要: 车联网在解决交通问题、保证大众安全等方面发挥着巨大作用。针对车联网测试成本高、不利于实验研发等问题,以V2X无线通信为依托,模拟车联网应用场景,设计硬件系统和软件系统。硬件设计按照实际车联网技术框架分为车载子系统、路侧子系统、后台中心子系统三部分;软件系统重点对CAN数据采集、后轮双电机差速控制原理、后台中心状态数据的解析及远程控制进行设计。最后,在具体应用场景中对车联网缩微模型进行测试,结果表明,该系统能够在路口和前向碰撞时自主协调,并通过ZigBee等通信模块实现信息共享,验证了系统的实用性和可行性。
关键词: 车联网; V2X; 远程控制; CAN数据采集; 自主协调; 信息共享; 场景测试
中图分类号: TN926⁃34; TP393" " " " " " " " " " 文献标识码: A" " " " " " " " " " "文章编号: 1004⁃373X(2024)24⁃0033⁃05
Design and implementation of internet of vehicle experiment system based on V2X
YANG Yitong, WU Jingjing, ZHANG Lili
(National Computer Experimental Teaching Demonstration Center, College of Computer Science and Engineering, Northeastern University, Shenyang 110819, China)
Abstract: The internet of vehicles plays a huge role in solving traffic problems and ensuring public safety. In allusion to the issues of high testing costs and unfavorable experimental research and development in the internet of vehicles, based on V2X wireless communication, the application scenario is simulated, and the experimental system including hardware and software system is designed. According to the actual technical framework of internet of vehicles, the hardware design is divided into three parts: vehicle subsystem, background center subsystem and road side subsystem. The software system focuses on the design of CAN (controller area network) data acquisition, differential control principle of rear wheel double motor, analysis and remote control of background center status data. The microminiature model of the internet of vehicles is tested in specific application scenarios. The results show that the system can coordinate autonomously at intersections and forward collisions, and realize information sharing by means of ZigBee and other communication modules, which can verify the practicability and feasibility of this design.
Keywords: internet of vehicles; V2X; remote control; CAN data acquisition; autonomous coordination; information sharing; scenario testing
0" 引" 言
车联网技术借助现代无线通信技术,可以实现车之间、车与外界之间的交互,能够全自动地提醒驾驶员可能存在的安全隐患问题,进而有效地避免交通事故的发生[1]。但是车联网的研发成本和测试成本普遍较高,对测试空间的需求也比较大,不太利于实验室研究开发[2]。
本文设计了基于缩微小车的车联网应用系统硬件开发环境,实现嵌入式端、计算机端、手机端协同,并且对车联网缩微模型的各个硬件部分进行了说明。通过需求分析,设计了针对各个需求的车联网缩微模型的软件程序结构,且进行了程序实现。另外,讨论了车联网的具体应用场景,针对实际应用场景进行了实验室场景测试。本文设计较好地模拟了车联网技术的应用场景,能够仿真一些实际交通状况,有助于解决实验教学中基于车联网开发所存在的问题。
1" 系统硬件设计
1.1" 系统硬件总体设计
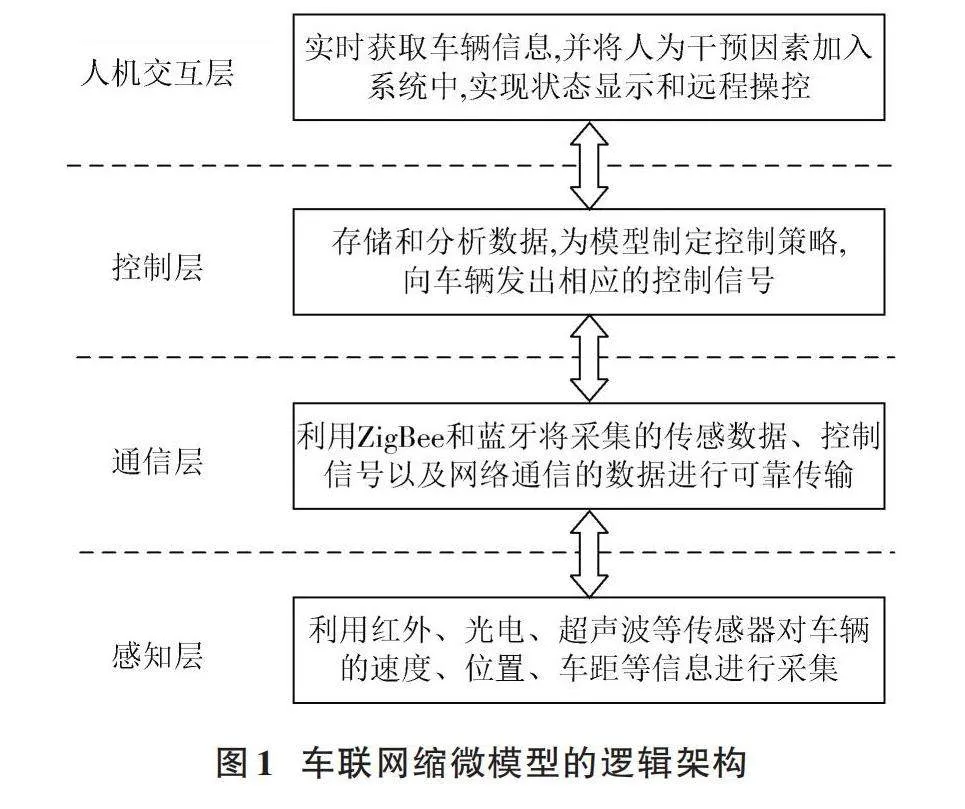
本文依照实际中的车联网技术框架,将实际车联网的三部分系统即车载子系统、后台中心子系统、路侧子系统[3⁃6]转变为适合实际开发需求的四层结构。所设计的车联网缩微模型逻辑架构如图1所示。
由下至上,感知层利用可以实现寻迹的相关传感器和UWB模型对小车的速度、坐标、与其他小车的距离等信息进行采集,并进一步完成简单的信息处理,将信息发送到通信层[7⁃10]。
通信层通过ZigBee和蓝牙,将传感器采集的经过处理之后得到的数据信息和控制信息进一步发送到控制层。
控制层进行数据处理,并将数据在人机交互层进行相应的展现,为模型制定控制策略,向车辆发出相应的控制信号。
车联网缩微模型的硬件设计整体架构如图2所示。
ARM核心微处理器采用的是STM32F405RGT6。传感器和UWB模块通过与各模块相对应的接口来连接STM32处理器。总体结构分为上位机和下位机两部分,人机交互设备和控制中心组成上位机,主要通信方式是蓝牙。中继小车的通信方式为ZigBee和蓝牙,使用的ZigBee模块工作频率为2 400~2 450 MHz,产品采用CC2530型号芯片,点对点工作模式。测试中需要考虑的ZigBee模块各项参数包括传输类型、PANID、MAC地址等。初始化设置完成后,各设备间就可以根据PANID是否相同进行自动搜索及通信。
1.2" 系统硬件模块设计
1.2.1" 车载子系统
车载子系统主要是通过超声波、红外灯传感器和UWB模块实现数据的采集,在处理器进行一定的数据处理,并且通过车载通信模块(ZigBee模块和蓝牙模块)完成信息的交互[11⁃12]。车载子系统结构如图3所示。
如图3所示,核心处理器为STM32F405RGT6芯片,内核为Cortex_M4,主频为168 MB,具有多个I/O口,而且支持扩展。在小车动力方面,1个舵机用来控制前轮转向,2个12V30FMG513电机控制后轮,此电机也可以获取车轮状态以得到一定的反馈,且小车搭载摄像头。无线超带宽(Ultra Wide Band, UWB)模块采用ToF方法来测距,即测量超声波在发射器和反射器之间的飞行时间。通过UWB模块的标签与小车连接实现小车的定位。
经过系统设计,车载子系统可实现的主要功能包括:车速检测、UWB模块实时获取位置信息、车距检测、车辆循迹和能量检测。
1.2.2" 路侧子系统
路侧子系统主要包括信号灯、路侧工控机、交换机等设备。信号灯和路侧工控机都与交换机相连,路侧工控机读取出信号灯的相位信息,封装编码后发送给路侧单元(Road Side Unit, RSU),由RSU通过UDP向周围的OBU广播信号灯消息。
1.2.3" 后台中心子系统
后台中心子系统相当于图1中的控制层和人机交互层,是车联网的管理部分,主要负责协调调度。作为全系统的控制核心,后台中心子系统主要用于处理和分析从底层采集的各种状态和图像数据,并将来自用户的控制信号发送到车载子系统和路侧子系统,从而实现人机交互,提升系统执行效率。因此,后台中心子系统具备以下功能:
1) 状态记录,能够实时同步小车当前的速度、电量、位置等信息,并且有一定的数据可视化功能,便于使用者查看;
2) 远程控制,使用者能在人机交互终端控制缩微小车的移动,并且可以实现一定的场景模拟反馈。
2" 系统软件程序设计
2.1" 车载子系统软件设计
车载子系统设计包括控制器局域网络(Controller Area Network, CAN)数据采集、后轮双电机差速控制、自动循迹的实现、车辆坐标获取及坐标运算、前车距离检测、车辆跟随与追赶策略等内容,由于篇幅限制,本文主要介绍CAN数据采集、后轮双电机差速控制。
2.1.1" CAN数据采集
CAN通过汽车的OBD接口可以读取CAN总线消息,用USB CAN转接口连接OBD接口,可将原始CAN数据以帧的形式通过串口通信传输至工控机。通过CAN总线读取小车自身传感器数据,数据传输标识符为0x100,CAN模块接收到数据之后需进行解码,部分代码如下:
Encoder_Left=rx[0]*(1⁃rx[1]);" " " " " " " " " " " " //左后轮速度
Encoder_Right=rx[2]*(1⁃rx[3]);" " " " " " " " " " " //右后轮速度
Rol1=(float)((rx[4]*256+rx[5])⁃15 000)/100;" " //前进方向角度
GZ=(rx[6]*256+rx[7]⁃32 768)/16.4;" " " " " "//水平方向角速度
2.1.2" 后轮双电机差速控制
实现小车的转向需要舵机和电机进行配合,本文采用汽车普遍使用的两个独立的电机驱动后轮,采用后轮双电机差速控制原理进行设计。
差速控制的实现代码如下:
void Kinematic_Analysis(float velocity, float angle)
{
Target_A=velocity*(1+T*tan(angle)/2/L);
Target_B=velocity*(1⁃T*tan(angle)/2/L);" " " " " " " //后轮差速
Servo=SERVO_INIT+angle*K;" " " " " " " " " " " " "//舵机转向
}
代码中velocity和angle分别是输入的速度和前轮转角。为了完成从前轮转向角到舵机PWM控制引脚的脉冲宽度转变,设置小车整体的系数K,这个系数与舵机的安装及PWM的初始化有关,需要实际测量。
舵机的控制需要将运动学分析得到的目标速度送入PID控制器进行速度闭环控制,这样才能输出一个合理的实际速度。代码如下:
int Incremental_PI_A(int Encoder, int Target)
{
static int Deangle, Pwm, Last_ Deangle;
Deangle =Target⁃Encoder;" " " " " " " " " " " " " " " "//计算偏差
Pwm+=Velocity_KP*(Deangle⁃Last_Deangle)+Velocity_KI*
Deangle;
Last_ Deangle = Deangle;" " " " " " " " " " " //保存上一次偏差
return Pwm;" " " " " " " " " " " " " " " " nbsp; " " " " " " " //增量输出
}
2.2" 后台中心子系统软件设计
后台中心子系统软件设计如下。针对来自缩微小车的数据信息如电量信息、速度信息、坐标信息等进行状态数据处理,解析之后在后台中心子系统环节用一定的数据可视化功能进行展示。状态数据的解析需要定时刷新,与此同时处理和删除一定的数据表。
针对数据状态解析,把收到的数据信息存入缓存,使用系统自带数据库System.Collections.Generic对数据信息进行初始化处理,把满足要求的数据封装为List类型数据,再解析出缩微小车的各项数据信息。
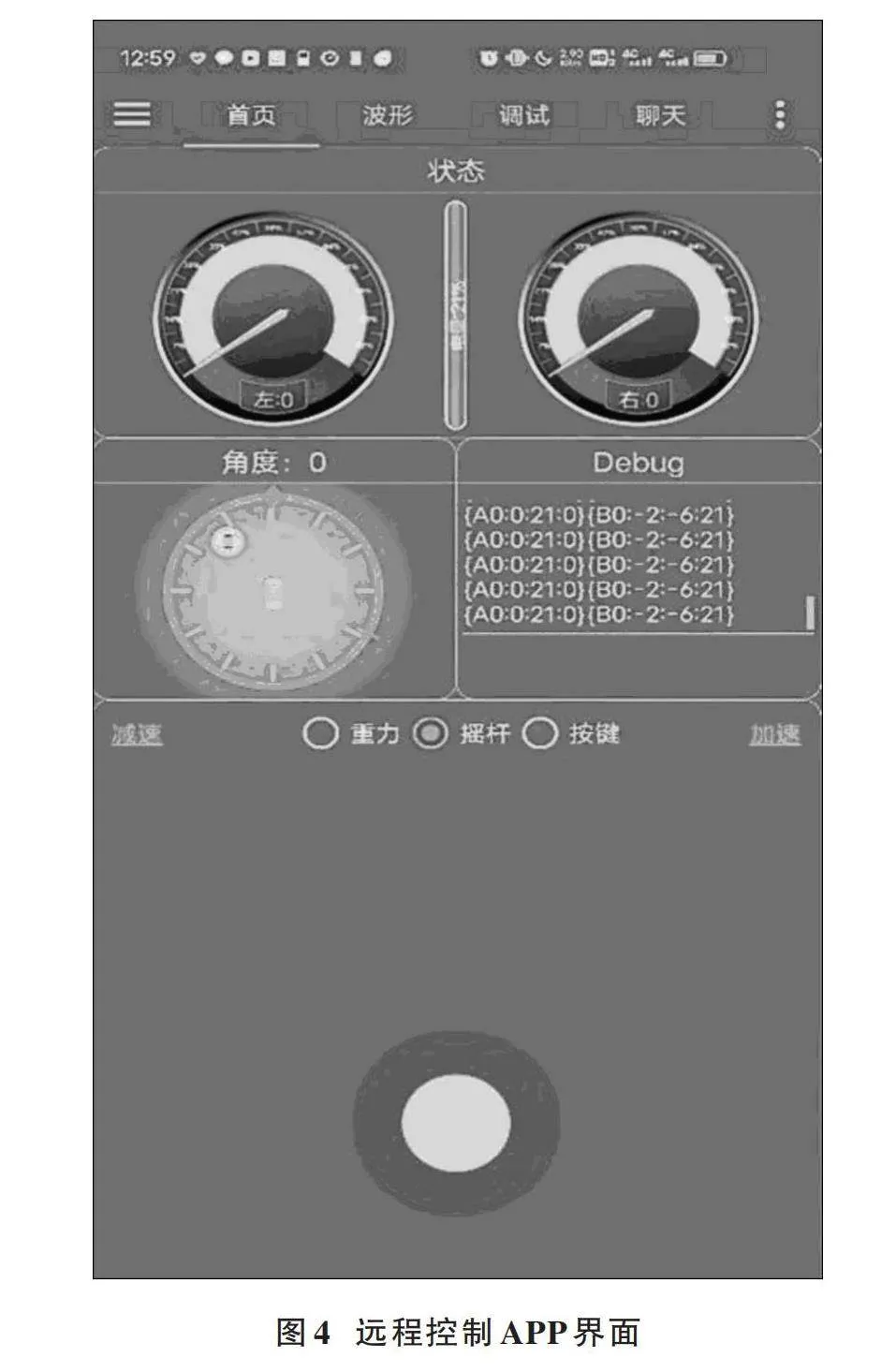
车辆的远程控制主要通过开发Android APP手机端来实现。为了对蓝牙通信模块进行合法调用,在Android Manifest. xml文件中增加相关配置内容:
lt;uses⁃permission android:name=\"android. permission. INTERNET\"/gt;
图4所示是远程控制APP界面,可以观测到小车当前的速度、电量和方位信息,并且能够通过摇杆、重力、按键等方式对小车进行远程控制。
3" 车联网场景测试
测试场景选择十字路口,本文实验铺设了白底黑线的5个路口,其中包含1个十字路口、4个丁字路口,这道路之外的4个角落放置UWB定位基站,用于获取装载UWB定位标签的缩微小车的位置。
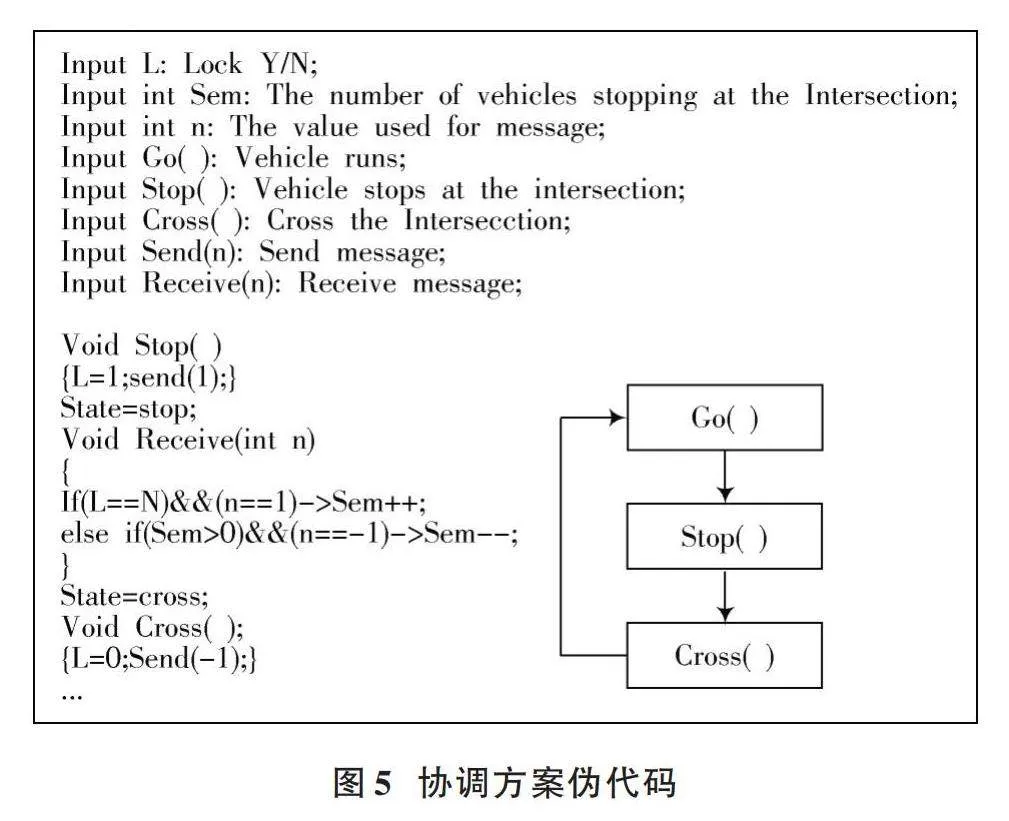
采用如图5所示的协调方案伪代码描述该情境下小车的实施策略,在图中Sem(占用道路情况)、Lock(是否处于锁定状态)、State(当前的运行状态)三个变量表示缩微小车的当前状态。小车可以向其他小车发送Sem、Lock、State三个变量的信息,通过无线通信实现小车运行状态的共享。当其他小车收到相应的信息时,就能知道当前路口的占用情况。Lock变量表示当前小车处于锁定状态,此时这辆小车不会受到其他小车发送信息的影响。
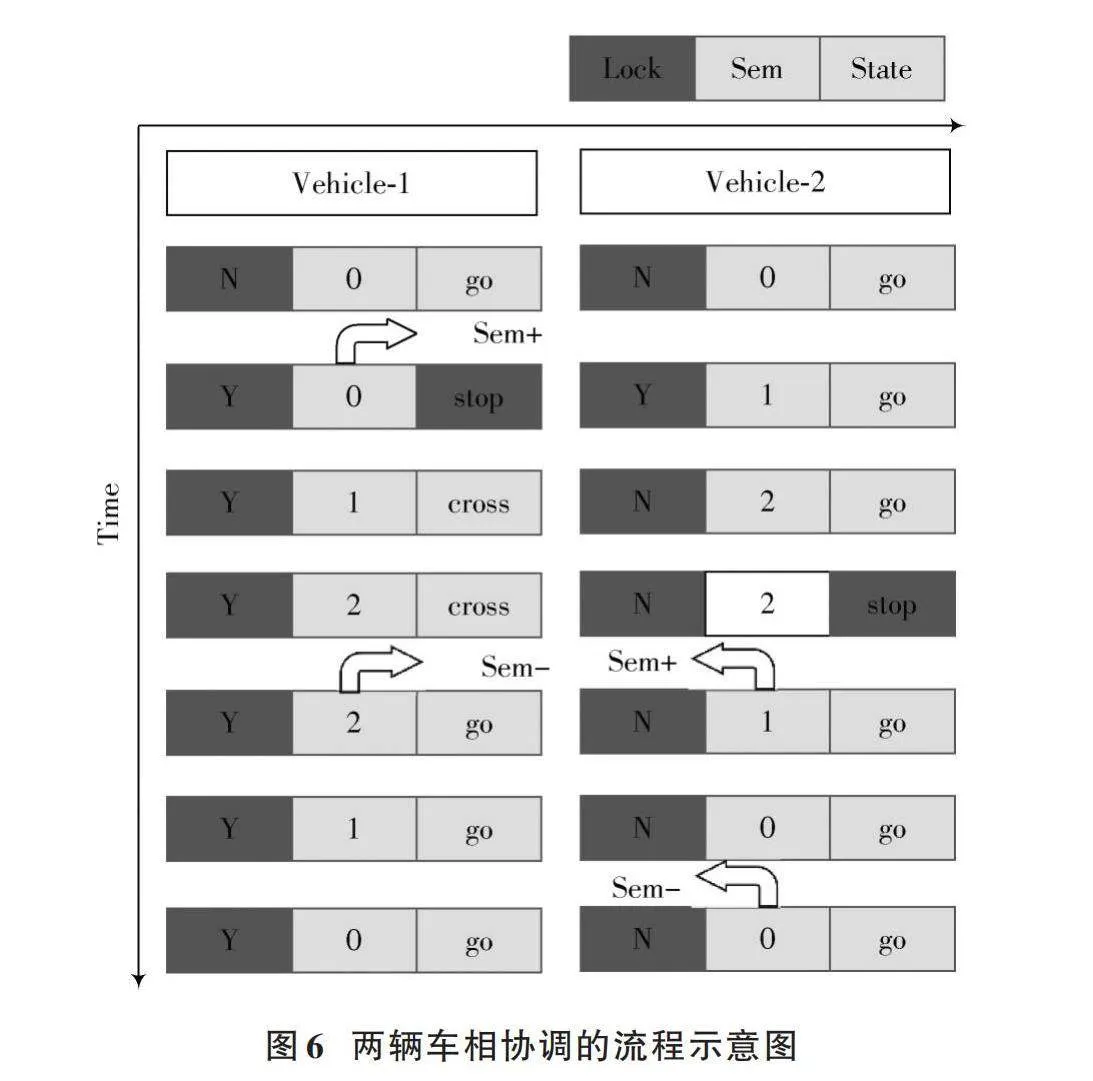
图6所示为两辆车相协调的流程示意图,本文对两辆车经过同一个十字路口的各种情况进行讨论。一开始两辆缩微小车都正常行驶在道路上,Sem初值均为0。首先缩微小车1到达十字路口,发出占用信息Lock,Sem请求加1,表示前往先一条道路,但是缩微小车2已经先行到达1号道路,那么缩微小车1就将State改变为Stop,待缩微小车的Lock状态转变并且Sem值改变之后再将State信息变换为Cross,从而进一步行驶。其余情况以此类推,最终按照图6伪代码所示的规则进行通信和协调控制,保证各小车在经过十字路口不会发生冲突。
通过实验测试可以看到缩微小车在经过十字路口时的自主协调过程,小车之间通过通信模块进行信息共享,进而根据先后和优先级情况做出相应的综合判断,有效避免了实际情况下交通拥堵情况的发生。
4" 结" 语
车联网V2X技术作为自动驾驶实现的前提,使车辆与周围车辆以及道路进行相互通信,从而使得车辆在换道等过程中获得信息并进行决策[13⁃14]。
为了模拟车联网应用场景,本文设计了基于V2X的车联网缩微模型,从硬件方面说明了车联网缩微模型的系统框架、硬件整体架构,进一步介绍了组成车联网缩微模型的三个部分,即车载子系统、路侧子系统和后台中心子系统的硬件实现方案。对车联网缩微模型的软件部分进行了说明,分别从车载子系统和后台中心子系统两部分进行阐述。
针对实际车联网应用场景进行了分析和仿真开发,最后根据所设计的车联网缩微模型进行系统测试,验证了本文系统设计的实用性和可行性。
注:本文通讯作者为吴菁晶。
参考文献
[1] XU Q, LIU W, SU Z Y, et al. Review on the evolutionprocess and key technologies of V2X⁃based protocol [J]. Chinese control and decision conference, 2022, 34: 979⁃983.
[2] SEHLA K, NGUYEN T M T, PUJOLLE G, et al. Resource alloc⁃ation modes in C⁃V2X: from LTE⁃V2X to 5G⁃V2X [J]. IEEE Internet of Things journal, 2022, 9(11): 8291⁃8314.
[3] 刘宗巍,匡旭,赵福全.V2X关键技术应用与发展综述[J].电讯技术,2019,59(1):117⁃124.
[4] ABDALLAH M, ABDALLAH S, PARISA H, et al. Edge⁃enabled V2X service placement for intelligent transportation systems [J]. IEEE transactions on mobile computing, 2021, 20(4): 1380⁃1392.
[5] 林晓伯,郑圣,邱佳慧,等.5G+MEC承载车联网业务传输性能测试与验证[J].现代电子技术,2024,47(3):171⁃178.
[6] ZHOU H B, XU W C, CHEN J C, et al. Evolutionary V2X technologies toward the internet of vehicles: challenges and opportunities [J]. Proceedings of the IEEE, 2022,108(2):308⁃323.
[7] 阴晓峰,朱宇航,赵小娟,等.基于5G V2X通信的车辆协同跟随控制策略研究[J].公路交通科技,2022,39(5):149⁃156.
[8] PENG G H, LUO C L, ZHAO H Z, et al. A novel lattice model integrating the cooperative deviation of density and optimal flux under V2X environment [J]. Chinese physics B, 2023, 32(1):716⁃723.
[9] 刘冲,张月霞.基于V2X和UAV的车辆协同定位方法研究[J].计算机仿真,2022,39(9):150⁃155.
[10] 赵红专,吴浩,卢宁宁,等.V2X环境下主干路相邻交叉口多目标协同优化模型研究[J].计算机应用研究,2022,39(10):3003⁃3007.
[11] 李源,刘玮.车联网产业进展及关键技术分析[J].中兴通讯技术,2020,26(1):5⁃11.
[12] 葛元,张为峰,韩延涛,等.基于C⁃V2X的车路群体协同混合组网[J].无线电工程,2022,52(1):11⁃18.
[13] 李婉莹,邱斌,蒋为,等.基于“分簇”的V2X车载广播信息传输策略[J].现代电子技术,2020,43(1):10⁃14.
[14] 刘丁柯.基于车联网的数据采集系统及定位技术研究[D].桂林:桂林电子科技大学,2020.
作者简介:杨一桐(1990—),女,辽宁沈阳人,硕士研究生,实验师,研究方向为无线传感器网络等。
吴菁晶(1981—),女,辽宁沈阳人,博士研究生,副教授,研究方向为车联网、光网络可靠性等。
猜你喜欢
中国广播(2016年11期)2016-12-26 10:01:28
电子技术与软件工程(2016年20期)2016-12-21 10:11:10
电子技术与软件工程(2016年19期)2016-12-19 18:10:37
安徽理工大学学报·自然科学版(2016年1期)2016-12-14 22:33:09
艺术科技(2016年10期)2016-12-14 00:11:02
科学与财富(2016年26期)2016-12-01 21:14:23
中小企业管理与科技·下旬刊(2016年10期)2016-11-18 19:48:13
价值工程(2016年29期)2016-11-14 01:04:54
中国科技博览(2016年22期)2016-11-01 15:57:12
科技视界(2016年21期)2016-10-17 20:14:41
