基于自适应滑模的储能系统控制环路电气设计
2024-12-15 00:00:00邵雅坤
现代建筑电气 2024年11期














摘 要:针对储能建筑系统在内部耦合现象以及外部复杂扰动的影响下出现的储能建筑系统输出电压不稳定等问题,提出了一种基于滑模控制和模糊聚类分析相结合的参数自适应滑模控制策略。根据储能系统双向传输变换器的拓扑结构,分析输出电压不稳定的原因,在储能变换器的控制环路中引入滑模控制,降低电压的期望值与实际值之间的误差,从而提升储能变换器的电压稳定性,并根据幅频特性分析法,对滑模参数变动对系统性能的影响进行分析,得到滑模参数的优化范围,为智能算法的整定奠定基础。为进一步提升系统的鲁棒性,引入模糊聚类分析技术,利用滑模规则和推导原理,对控制环路参数进行特征分析与特征提取,保证参数在多变环境中的优异性。为验证所设计的控制策略的正确性,建立储能建筑系统的数字实验模型,并设计基于自适应滑模的控制环路对其进行控制,与其他控制方法进行比较,自适应滑模控制下的输出电压具有较高的电压稳定性,为储能建筑系统的安全稳定运行提供了重要保障。
关键词:储能建筑系统; 滑模控制; 模糊聚类分析; 鲁棒性
中图分类号: TU852
文献标志码: A
文章编号: 1674-8417(2024)11-0001-06
DOI:10.16618/j.cnki.1674-8417.2024.11.001
0 引 言
随着可再生能源技术的快速发展和普及,储能建筑系统作为一种有效的能源管理手段,越来越受到关注。然而,由于内部耦合现象和外部复杂扰动的影响,储能建筑系统输出电压的稳定性面临着严峻挑战。特别是在储能系统双向传输变换器的控制过程中,电压的期望值与实际值之间的误差常导致系统性能的不稳定[1-3]。
针对各类情况导致的系统电压不稳定等问题,传统的控制方法缺乏对控制环路参数变化的实时适应能力,难以有效应对储能建筑系统在不同工作条件下的优化控制需求。基于此,文献[4]提出了一种基于BP神经网络和传统PID控制相结合的改进PI控制方法,但PID控制在面对储能建筑系统复杂的动态特性和非线性耦合时,难以提供足够的精度和稳定性;文献[5]根据储能变换器的数学模型,引入了模型预测控制,利用预测未来状态来优化控制动作,适用于负载的非线性系统,但模型预测控制需要准确的系统的模型和大量计算资源;文献[6]设计了一种模糊控制策略,利用模糊逻辑推理处理系统的非线性和模糊性,具有强适应性,可在没有精确数学模型的情况下进行控制,但模糊控制的性能高度依赖于规则库的设计和成员函数的选择,需大量的专家经验进行优化,不符合实际工程需要。
针对上述传统控制方法和各类改进控制方法的不足,本文设计了一种结合滑模控制和模糊聚类分析的自适应滑模控制策略。该策略首先利用滑模控制有效减小电压误差,从而显著提升储能建筑系统的电压稳定性。通过幅频特性分析法确定滑模参数的优化范围,为智能算法的精确整定提供了理论基础。此外,设计中引入了模糊聚类分析,用于优化控制策略的决策过程,提高系统对复杂工作环境的适应性和鲁棒性。最后,通过详尽的数字实验对比验证了所提方法的正确性和有效性,证明了其在提高储能建筑系统电压稳定性和整体性能方面的显著优势。基于综合应用的控制策略不仅填补了传统方法在动态响应和复杂环境适应性上的不足,也为未来类似系统的控制优化提供了有力的参考和借鉴。
1 基于自适应滑模的控制环路电气设计
储能建筑系统由多种关键组件构成,如储能设备、能量管理系统和电气设计部分等,各类组件相互协作以提升能源利用效率和系统稳定性。然而,由于系统内部耦合现象、非线性特征等性质的存在,储能系统的输出电压稳定性并不强,因此为提升储能系统的电压稳定性,从而保证内部系统的正常安全运行,对控制环路进行合适的电气设计。储能系统的架构图如图1所示。
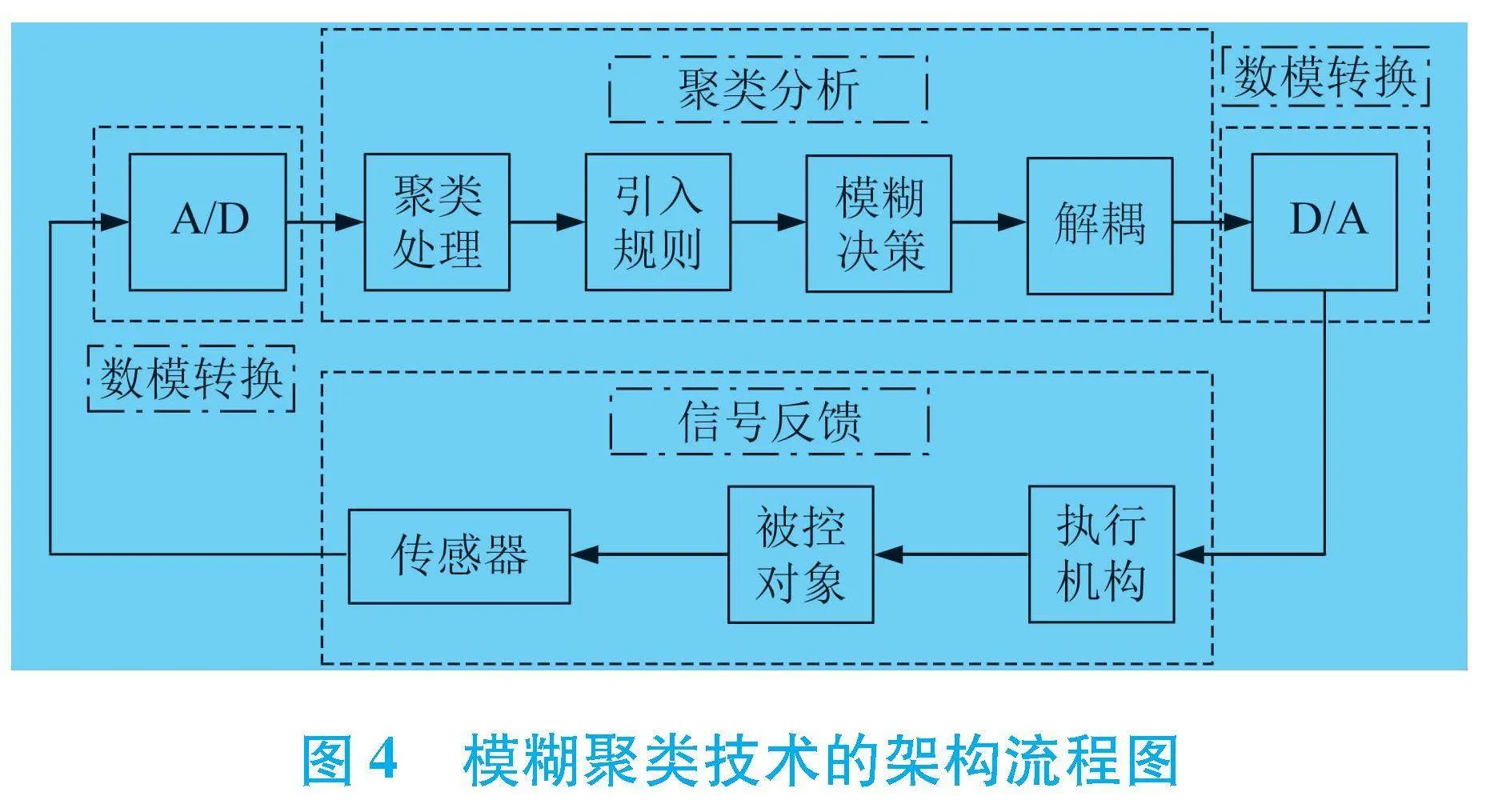
对图1中储能系统传输部分的变换器进行拓扑模型建立。储能系统传输变换器拓扑架构图如图2所示。
图1中:U1为等效输入电压;U2为等效输出电压;S为开关管;D为二极管;L为滤波电感;C为稳压电容;R为负载。
在图2的基础上引入滑模控制。滑模控制是一种重要的非线性控制方法,其核心概念是通过引入一个滑动面,使得系统状态能够在这个面上快速且稳定地滑动,从而实现对系统动态特性的精确控制。在滑模控制中,通过设计合适的滑动面和控制律,可实现对系统的快速响应和强鲁棒性,即使在面对模型不确定性、外部扰动和参数变化时,系统仍能保持稳定运行[7-10]。根据储能变换器拓扑结构,建立滑模控制的等效趋近律为
式中: s——滑模面函数;
ε,δ,k,η——趋近常数;
B——系统的状态变量。
趋近常数的取值范围为
当系统的状态收敛于平衡点时,改进变速趋近律与变速趋近律速度比值为
建立储能变换器的数学模型为
式中: x1,x2,x3——储能变换器的状态变量;
Uref——期望电压。
对式(3)进行化简,可得:
式中: iL——电感电流;
ic——电容电流。
储能变换器控制结构图如图3所示。
根据图3,系统的特征方程为
s=l1x1+l2x2+l3x3(5)
式中: l1,l2,l3——滑模面参数。
控制环路的设计需满足下述条件:
综上所述,基于滑模控制的控制环路电气设计数学模型为
式中: u——控制环路的控制输入。
引入滑模控制到储能系统的控制环路中,显著提升了系统对电压稳定性的控制能力。通过滑模控制的快速响应特性和强鲁棒性,系统能有效抑制外部扰动对电压的影响,确保其在各种工作条件下保持稳定和可靠的运行状态。但仅靠滑模控制存在多个整定控制参数,为便于参数整定,引入模糊聚类分析技术[11-12]。
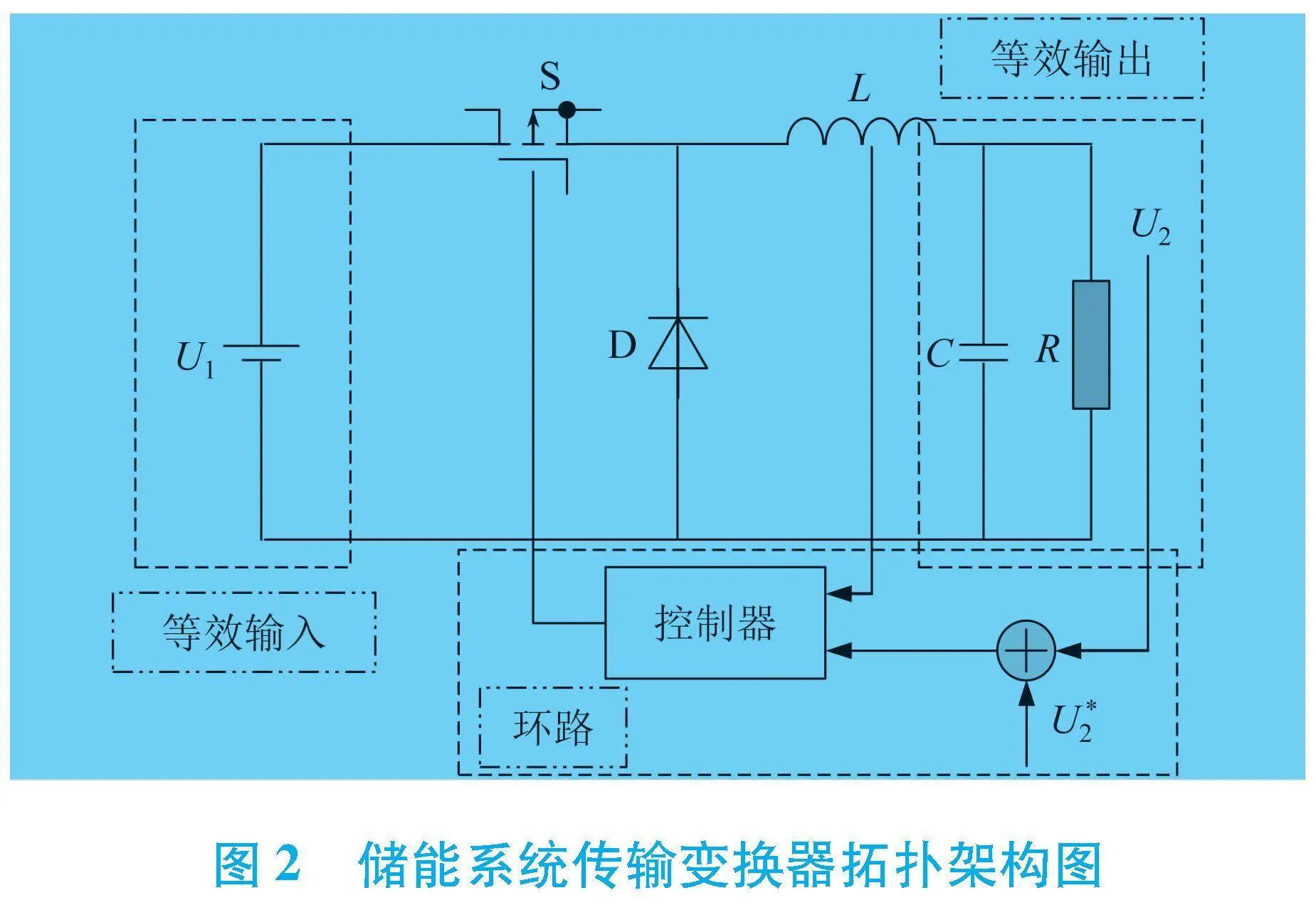
与传统聚类方法不同,模糊聚类允许数据点按照一定的隶属度分布到不同的类别中,而不是严格地划分为特定类别。其核心思想是通过定义每个数据点对于每个类的隶属度,来描述数据点与类别之间的模糊关系。模糊聚类技术的架构流程图如图4所示。
利用模糊聚类分析技术对滑模控制中的整定参数进行自适应整定,根据期望数值与实际数值之间的大小,从而模拟分析得出适应系统的参数值。聚类分析计算方法采用余弦距离法,表达式为
式中: J——聚类函数;
m——整定增益。
根据式(7)得出聚类分析对参数的整定误差为
式中: e——整定误差;
N——样本总数;
C——均值。
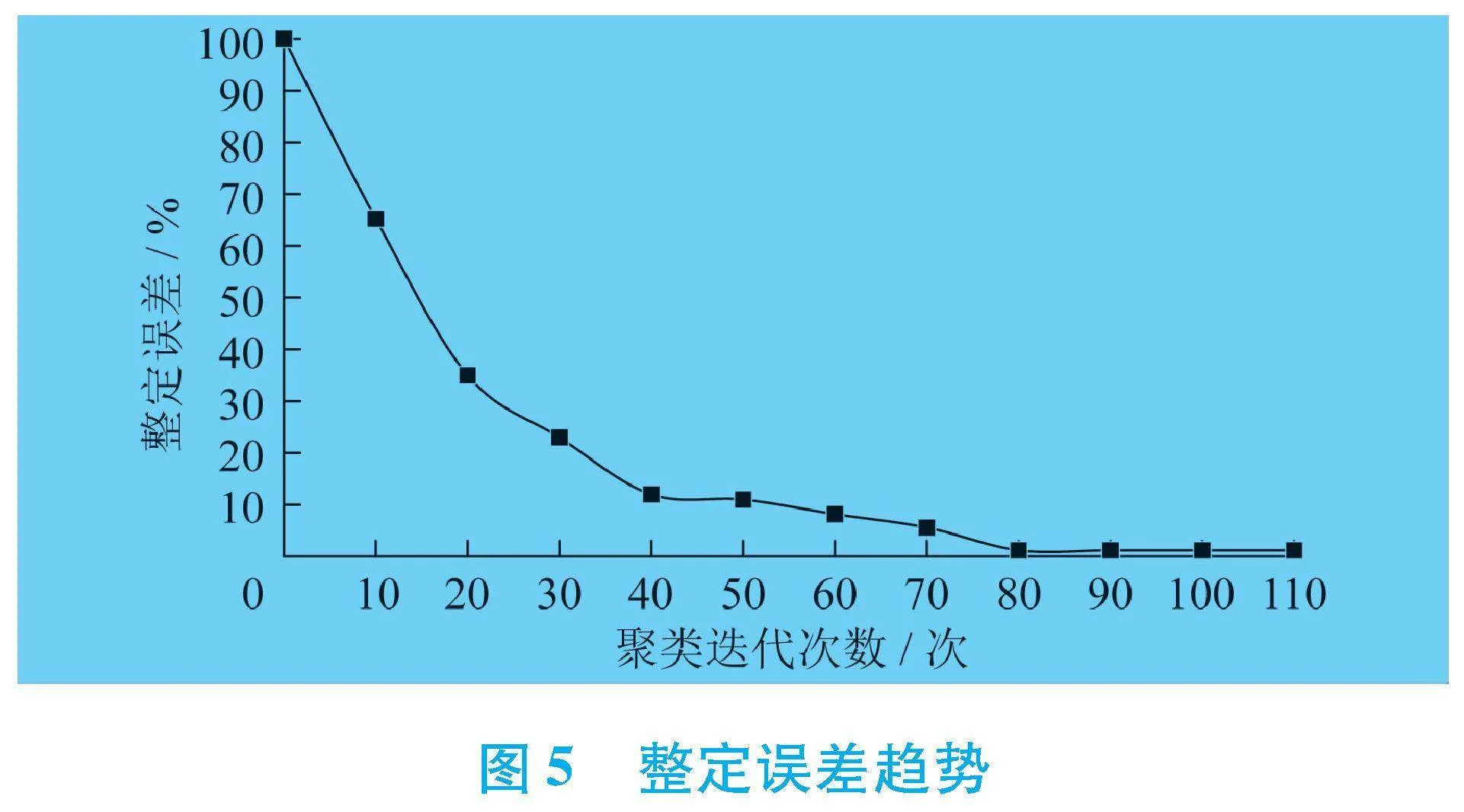
根据式(8),整定误差趋势如图5所示。
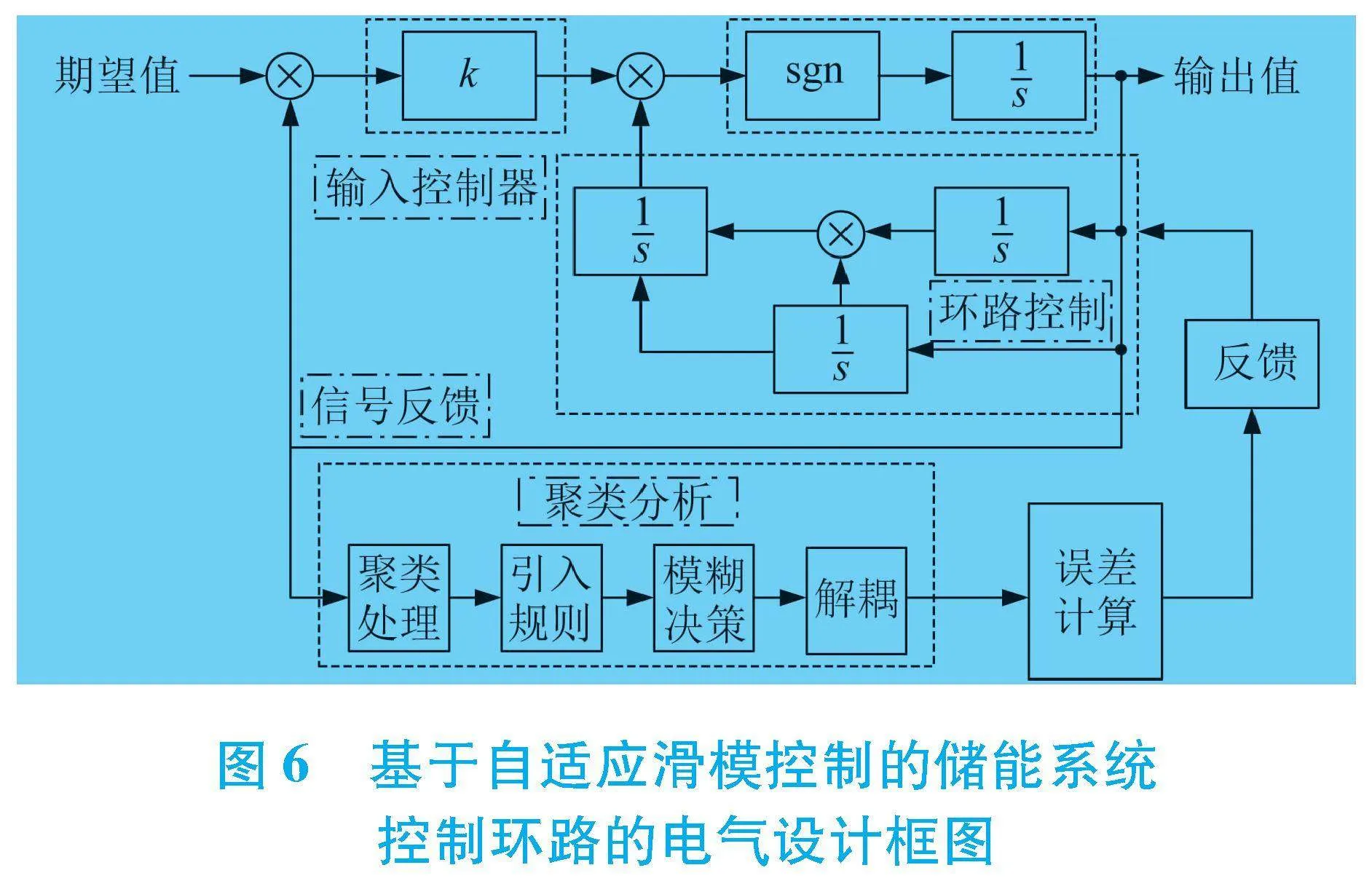
由图5可知,随着聚类迭代次数的增加,整定误差逐步减小,使得模糊聚类算法能更精确地调整类中心和隶属度分布,从而提高聚类结果的准确性和稳定性。此类迭代优化过程有助于在复杂数据集中有效地发现潜在的数据模式和结构,从而更好地降低整定误差,为储能系统的稳定性奠定重要基础。基于自适应滑模控制的储能系统控制环路的电气设计框图如图6所示[13-14]。
综上所述,自适应滑模控制的电气设计流程图如图7所示。
2 实验对比
为验证结合滑模控制和模糊聚类分析技术的自适应滑模控制的有效性,在MATLAB/Simulink数字仿真平台上建立了数字实验模型,并与BP神经网络算法以及传统滑模控制进行了比较。该研究旨在探索这一新颖方法在提高控制系统性能方面的潜力。通过仿真实验,评估了自适应滑模控制在应对模型不确定性和外部扰动方面的表现,以及其在稳态和动态响应中的优势,实验结果将为进一步优化控制策略提供重要的理论和实证支持。实验参数如表1所示。
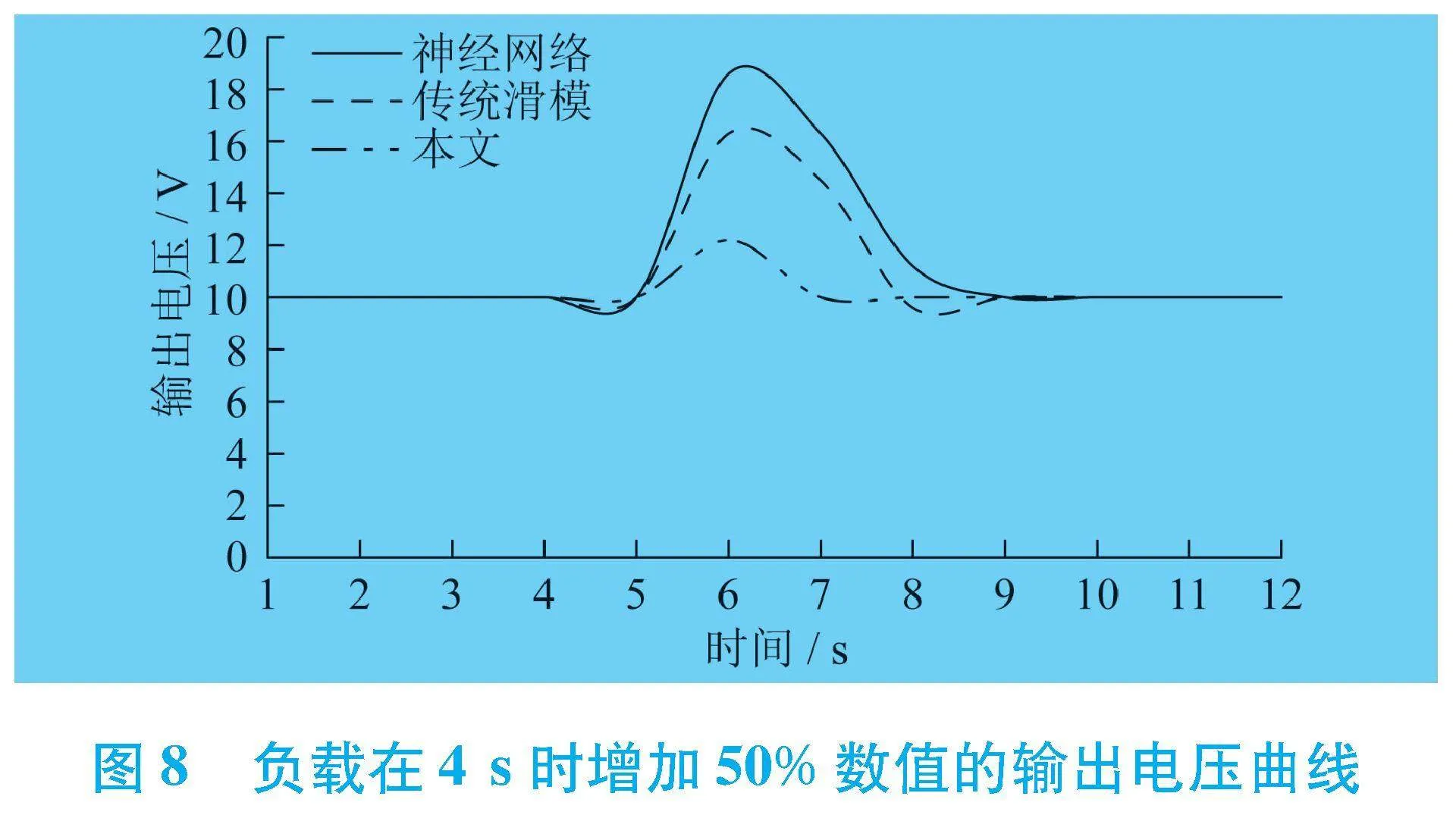
选择负载数值跃变作为验证系统电压稳定性的工况,可有效评估自适应滑模控制在动态响应和稳态维持中的表现。通过仿真实验模拟负载突变情况,验证控制系统在不同工作条件下的稳定性和可靠性,进一步验证其在实际工程中的适用性和优越性。负载在4 s时增加50%数值的输出电压曲线如图8所示。
由图8可知,选择在4 s时将负载从100%突变增加至150%,以评估3种控制方法在系统输出电压稳定性方面的表现。结果显示,神经网络和传统滑模控制下的输出电压出现了较大幅度的跃变,约为50%。相比之下,采用本文提出的自适应滑模控制方法的输出电压跃变幅度最小,表现出更强的扰动抑制能力和更高的稳定性。此结果强调了自适应滑模控制在动态响应中的优势,可有效应对负载突变引起的系统波动,从而提升系统的稳定性和可靠性。
输入电压在3 s时增加50%时的输出电压曲线如图9所示。
由图9可知,在3 s时,输入电压增加50%,在神经网络和传统滑模控制下,电压跃变较为显著,而在自适应滑模控制下,输出电压的跃变程度较小,且能在较短时间内重新回到稳定区域,这表明自适应滑模控制具有更好的电压稳定性。自适应滑模控制能够有效抑制扰动,展现了其在动态响应管理方面的优势,并提高了系统的可靠性。
在3 s时系统内部突然引入非线性负荷时的电压曲线如图10所示。
由图10可知,在3 s时引入非线性负荷,神经网络和传统滑模控制下的电压跃变量远超自适应滑模控制下的电压跃变量,进一步强调了自适应滑模控制在面对复杂负载时,具备更为稳定和可靠的电压响应能力。
3 结 语
针对储能建筑系统内部耦合和外部复杂扰动对输出电压稳定性的影响问题,提出了一种结合滑模控制和模糊聚类分析的参数自适应滑模控制策略。相较于BP神经网络和传统滑模控制,该方法利用滑模控制增强系统抵抗扰动的能力,并通过模糊聚类分析技术优化参数,显著改善了系统的输出电压稳定性。这种策略有效提升了储能系统在复杂工况下的运行性能和稳定性,为储能建筑系统的可靠运行提供了重要保障,具有实际工程应用的潜力。该方法不仅在理论上提升了控制策略的智能化水平,同时通过实证分析验证了其在实际环境中的可行性和有效性,为未来储能系统的设计和优化提供了有益的指导和参考。
[1] 吴津庆.基于预测函数控制的DC/DC变换器研究[D].马鞍山:安徽工业大学,2018.
[2] 王海生.分数阶PID预测函数控制在DC/DC变换器中的应用研究[D].马鞍山:安徽工业大学,2020.
[3] 黄煜茹.Buck变换器滑模控制方法的研究[D].徐州:中国矿业大学,2021.
[4] 英钊.Buck变换器滑模控制系统的时域/频域分析[D].哈尔滨:哈尔滨工业大学,2021.
[5] 牛子铭.基于滑模控制的Buck变换器数字控制系统设计[D].哈尔滨:哈尔滨工业大学,2021.
[6] 王殿.固定频率buck变换器的二阶滑模控制[D].重庆:重庆大学,2020.
[7] 孙亚.双向DC/DC变换器的控制方法研究与设计[D].哈尔滨:哈尔滨工程大学,2014.
[8] 董坦坦.基于dSPACE的DC-DC降压变换器滑模控制方法研究[D].哈尔滨:哈尔滨工业大学,2019.
[9] 金慧红.基于滑模变结构控制的Buck型DC-DC开关电源的研究[D].杭州:杭州电子科技大学,2021.
[10] 余初阳,楼旭阳,马艺飞,等.输出受限的柔性海洋立管自适应神经网络边界控制(英文)[J].Frontiers of Information Technology amp; Electronic Engineering,2022,23(8):1229-1239.
[11] 杨旭红,陈阳,贾巍,等.基于RBF神经网络的电压外环滑模控制的Vienna整流器[J].电力系统保护与控制,2022,50(18):103-115.
[12] SIDDESH K B,BANAKARA B,SHIVARUDR-ASWAMY R.Robust reaching law for chattering mitigation in sliding mode controlled DC-DC Buck converter[J].Journal of Advanced Research InDyna-mical and Control Systems,2019,11(4):565-573.
[13] SIDDESH K B,BASAVARAJ B.Chattering analysis in sliding modecontrolled DC-DC Buck converter using new novel reachinglaw method[J].Journal on Electrical Engineering,2017,10(4):22-27.
[14] TARISCIOTTI L,COSTABEBER A,CHEN L,et al.Current-fed isolated DC/DC converter for future aerospace mi-crogrids[J].IEEE Transactions on Industry Applications,2018,55(3):2823-2832.
Electrical Design of Control Loop for Energy Storage System
Based on Adaptive Sliding Mode
Abstract:
A parameter adaptive sliding mode control strategy based on a combination of sliding mode control and fuzzy clustering analysis is proposed to address the unstable output voltage of energy storage building systems under the influence of internal coupling phenomena and external complex disturbances.Based on the topology structure of the bidirectional transmission converter in the energy storage system,the reasons for unstable output voltage are analyzed.Sliding mode control is introduced into the control loop of the energy storage converter to reduce the error between the expected and actual voltage values,thereby improving the voltage stability of the energy storage converter.According to the amplitude frequency characteristic analysis method,the impact of sliding mode parameter changes on system performance is analyzed,and the optimization range of sliding mode parameters is obtained,laying the foundation for the tuning of intelligent algorithms.To further enhance the robustness of the system,fuzzy clustering analysis technology is introduced,and sliding mode rules and derivation principles are used to perform feature analysis and feature extraction on the control loop parameters,ensuring their excellent performance in variable environments.To verify the correctness of the designed control strategy,a digital experimental model of the energy storage building system was established,and a control loop based on adaptive sliding mode was designed to control it.Compared with other control methods,the output voltage under adaptive sliding mode control has high voltage stability,providing important guarantees for the safe and stable operation of the energy storage building system.
Key words:
energy storage building system; sliding mode control; fuzzy clustering analysis; robustness
猜你喜欢
科技研究·理论版(2021年22期)2021-04-18 00:43:01
农业机械学报(2020年2期)2020-03-09 07:35:30
中华建设(2019年7期)2019-08-27 00:50:18
系统管理学报(2018年2期)2018-08-13 01:04:40
价值工程(2016年35期)2017-01-23 17:26:32
软件导刊(2016年11期)2016-12-22 21:46:22
项目管理技术(2016年12期)2016-06-15 20:29:33
西南交通大学学报(2016年6期)2016-05-04 04:13:11
中国科技博览(2016年3期)2016-04-25 17:06:35
中国科技博览(2016年5期)2016-04-23 05:45:45