
提高风电机组低风速段发电能力的研究
2024-12-08 00:00:00和军梁冯斌
中国新技术新产品 2024年9期






摘 要:在现货市场下,要想提高实时市场的收入,必须提高风电场的发电量,尤其在小风时期,现货实时市场的价格较高,如果能提升风电机组低风速段的发电能力,就会有效提高电价。本文讨论环境温度对空气密度的影响,提出根据环境温度动态调整风电机组切入风速和偏航控制风速阈值设定值,在偏航系统部件寿命和电量损耗情况下优化偏航系统控制逻辑,制作专用工装进行偏航系统风向标校零,可保证风电机组在低风速情况下充分发挥发电能力,提高高电价上网电量,以期取得较好收益。
关键词:现货交易;风电机组;低风速;发电能力;环境温度
中图分类号:TM 61 " " 文献标志码:A
在现货市场下,发电企业收益来源主要由中长期合约收益(月度交易、旬度交易和日滚动交易)和现货市场收益构成(日前市场收益和实时市场收益)。在这3种收益中,中长期合约收益和日前申报收益可以通过合理地营销策略进行优化[1],唯独实时收入由实际发电量和实时市场价格来决定,不能通过人为控制来提升。要想提高实时市场收入,必须提高自身发电量,尤其在小风时期,由于全省风电实际出力较小,实时现货市场价格会因火电的竞价空间提升而升高,如果再遇光伏出力受限和火电机组自身发电性能不良的情况,现货实时市场的价格就会非常高。数据表明,如果能在低风速阶段提升机组的发电能力,保证机组在低风速下的发电量,就会提高收益。提高风电机组低风速发电能力主要可从以下4个方面推进。
1 合理设定风电机组切入风速
风电机组切入风速是指风电机组开始并网发电的最低风速,联合动力1.5MW机组切入风速为3m/s。风电机组是否启机并网的根据是平均风速是否达到3m/s,但是风所蕴含的能量不仅与风速相关,当环境温度差距较大时,风能差距也较大,风电机组发电功率差距也较大。
1.1 环境温度与发电功率的关系
空气流动具有的动能为E=ρsv3[2],其中ρ为空气密度;s为气流截面积;v为风速。由该公式可知,风能与空气密度成正比,空气密度越大,风能越大。另外,根据叶素-动量理论,作用在风轮转动平面dr圆环的扭矩为dM=ρsv2 0Ctrdr[2],其中B为叶片数;ρ为空气密度;c为叶素剖面弦长;v0为气流合成速度;Ct为切向力系数;r为当地半径。由该公式可知,作用在风轮上的转矩与空气密度成正比,空气密度越大,作用在风轮上的转矩也越高,相同风轮转速下对应的风轮功率也会越大。
而在不同温度条件下,空气密度差距较大,如-20℃时干空气密度为1.396kg/m3,30℃时干空气密度为1.165kg/m3,
-20℃时干空气密度为30℃时干空气密度的1.2倍,而且北方地区冬夏温差更大,冬季气温甚至可低至-30℃,空气密度更大,风能更大,风电机组发电功率也相对较大。
根据理想气体状态方程(不考虑湿度影响时)pV=nRT[3],其中p为压强;V为气体体积;n为气体的物质的量;R为摩尔气体常数;T为温度(K),计算可得-30℃时干空气密度为1.452kg/m3,约为30℃时干空气密度的1.25倍,可见不同环境温度下风电机组发电功率相差较大。
1.2 风电机组切入风速设定
由于冬季环境温度较低,空气密度较大,在临近风电机组切入风速的情况下,风电机组实际已满足并网发电条件,但是风电机组只检测到风速小于切入风速,未启机并网,会产生电量损失。因此可将环境温度列入风电机组启机的条件,随着环境温度降低,风电机组对应切入风速也会降低[4]。
根据风电机组设计要求标准,风电机组正常环境条件下空气密度为1.225kg/m3(对应空气温度约为15℃),如某类型风电机组在环境温度为15℃条件下的对应切入风速为3m/s,根据风能公式E=1/2ρsv3,可计算该风电机组启机时对应的风能。在保证风电机组启机时风能相同的情况下,参照各环境温度下的空气密度表,计算各环境温度应设定的切入风速,见表1。
1.3 程序控制逻辑升级
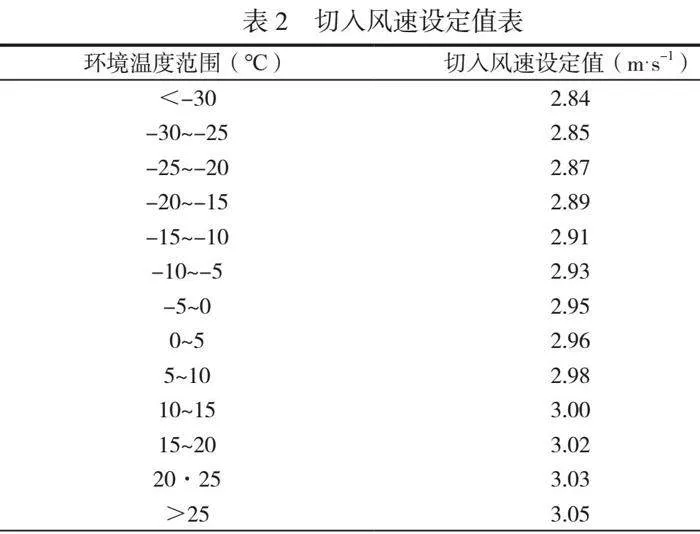
通过升级风电机组主控程序,可实时测量环境温度动态控制风电机组启机风速[5],环境温度测量可使用原风电机组测量的环境温度值。不同环境温度条件下风电机组切入风速设定值见表2。
根据环境温度动态调整风电机组切入风速,可保证风电机组在各环境温度下充分发挥发电能力,提高高电价上网电量,还可避免由高温小风天气时风电机组并网耗电量大于发电量造成的损失。
2 偏航零位校准
风电机组装有风向标,可实时测量来流风向,用于风电机组控制系统计算风电机组对风偏差,并进行偏航对风,以便更好地捕捉风能,提高风电机组发电量。如果风向标初始安装角度与机舱走向偏差较大,风电机组始终与来流风向存在角度偏差,就会长期影响风电机组发电性能[6],损失发电量巨大,因此需要定期排查风向标安装方向是否正确,发现异常即及时校正风向标。
风电机组一般配置机械式风向标或超声波风向标,安装风向标时必须保证风向标N-S标记线与机舱走向平行且N点指向机舱尾部。目前,现场人员通常通过目测来大致调整风向标N-S标记线与风电机组机舱走向平行并校准风向标,由于人工目测安装存在较大偏差,会导致风电机组始终无法正对风发电,从而长期影响风电机组的功率输出,因此需要设计并使用便捷高效的风向标校准装置进行风向标校准安装。
本文分析了风电机组风向标安装的气象架结构、机舱罩机构、风电机组维护经验以及当前先进技术,初步研究总结出2种风电机组风向标校准方案,包括以气象架为基准的机械校准和以机舱罩为基准的激光校准。
2.1 以气象架为基准的机械校准
由于风向标安装于风电机组机舱顶部气象架上,如果测量判断该类气象架基本垂直于机舱走向且气象架横担端面平齐,气象架横担即可作为风向标的校准基准,而且通过目测来校准风向标N-S标记线本质上均以气象架横担为基准。
2.1.1 机械校准工装制作
机械校准工装结构如图1所示,其中要求校准工装各面均为平面,各角均为直角,各连接面均对齐,以保证工装测量的准确度。
2.1.2 机械校准工装使用
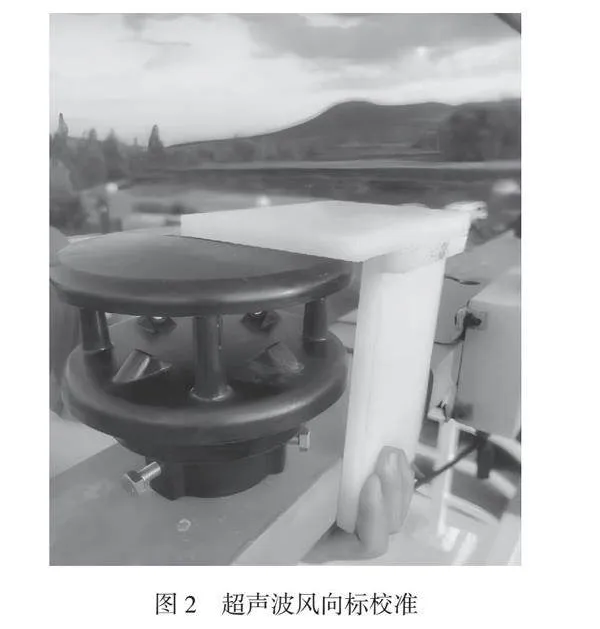
超声波式风向标:超声波式风向标顶部印有一条N-S标记线,将机械校准工装平面贴紧气象架横担端面,调整超声波式风向标,使其N-S标记线与对应工装端面重合后,拧紧超声波式风向标底座的锁紧螺母即可。具体校准方法如图2所示。
机械式风向标:由于机械式风向标N点、S点标记在风向标侧面,校正较困难,因此将风向标调节至180°方向(调试软件内显示值为180°)后将尾翼固定,再使用工装平面贴紧气象架横担端面,整体调整机械式风向标,使风向标尾部与对应工装端面齐平,拧紧机械式风向标底座的锁紧螺母即可。具体校准方法如图3所示。
2.2 以机舱罩为基准的激光校准
部分风电机组气象架与机舱走向不垂直,无法以气象架为基准校准风向标。由于机舱罩为左、右对称形状,并且顶部基本有明显标记,可确定出机舱中心线,因此机舱罩中心线可作为校正风向标的基准。
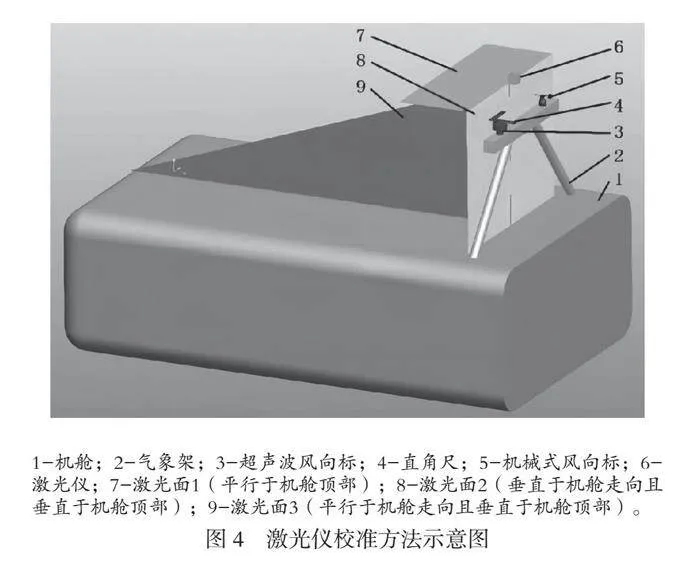
本文方案采用工程用户外高精度强光激光仪。该激光仪具有自动安平功能,倾斜超3°时报警,倾斜3°以内时自动调节至水平,所发射激光严格竖直向下且可发射3个相互垂直的激光面。
激光仪校准方法示意图如图4所示。可调节支架将激光仪安装于气象架顶部,手动调节支架,使激光仪保持水平(激光仪不报警即可自动安平)并且使激光面3(平行于机舱走向且垂直于机舱顶部)经过机舱罩中心线,此时激光面1(平行于机舱顶部)与机舱顶部水平,并且激光面2(垂直于机舱走向且垂直于机舱顶部)垂直于机舱走向,因此激光面2可作为风向标校准的基准。
将长直角尺一边与激光面2形成的激光线对齐,直角尺另一边指向即为机舱走向。手动调节风向标,使N-S标记线或机械式风向标尾翼与直角尺另一边对齐,此时风向标指向即为机舱走向,固定风向标底座即可。直角尺测量方法示意如图5所示。
3 优化偏航控制逻辑
联合动力1.5MW机组偏航控制逻辑如下所示。1)设定高风速阈值7.5m/s,分为高风速偏航和低风速偏航,不同的风速条件下偏航的动作方式不同。2)高风速下自动偏航。60s平均风速≥7.5m/s,触发偏航程序的条件有以下2个。①高风速下一级偏航动作条件。偏航对风60s平均偏差>8°,延时160s,风电机组偏航。②高风速下二级偏航动作条件。偏航对风60s平均偏差>15°,延时20s,风电机组偏航。3)低风速下自动偏航。60s平均风速<7.5m/s,触发偏航程序的条件有以下2个。①低风速下一级偏航动作条件。偏航对风60s平均偏差>10°,延时160s,风电机组偏航。②低风速下二级偏航动作条件。偏航对风60s平均偏差>18°,延时25s,风电机组偏航。
现针对风电机组低风速发电能力,需要对高风速阈值、低风速下偏航角度偏差以及偏航延时设定值进行优化,主要从以下2个方面进行评估。
3.1 高风速阈值设定
在不同环境温度条件下,相同风速的空气动能不同,因此偏航控制中高风速阈值应根据环境温度进行动态调整。如联合动力1.5MW机组偏航控制高风速阈值设定值为7.5m/s,计算出的不同环境温度下高风速阈值见表3。
通过升级风电机组主控程序,可实现实时测量环境温度动态控制风电机组偏航控制中高风速阈值。不同环境温度范围下风电机组偏航控制高风速阈值设定值见表4。
3.2 优化偏航控制逻辑
本文对风电机组偏航控制中偏航角度偏差、偏航延时、高风速阈值设定值进行了优化。首先,风速阈值设定值可分级设定,分为高风速阈值、中风速阈值和低风速阈值,如设定值分别取高风速阈值(9m/s)、中风速阈值(6m/s)、低风速阈值(4m/s),在不同风速条件下,采取不同的偏航动作方式。其次,各风速阈值下自动偏航控制可由原两级控制逻辑优化为多级控制逻辑,例如低风速阈值下自动偏航控制条件如下所示。1)低风速下一级偏航动作条件。偏航对风60s平均偏差>10°,延时160s,风电机组偏航。2)低风速下二级偏航动作条件。偏航对风60s平均偏差>13°,延时120s,风电机组偏航。3)低风速下三级偏航动作条件。偏航对风60s平均偏差>15°,延时80s,风电机组偏航。4)低风速下四级偏航动作条件。偏航对风60s平均偏差>18°,延时25s,风电机组偏航。
将偏航角度偏差、偏航延时和高风速阈值设定值进行优化,以达到精细化控制的目的,提高风电机组低风速发电能力。需要注意的是,将偏航角度偏差、偏航延时设定值调小后,风电机组将会更频繁地进行偏航对风,发电量将小幅增加。由于偏航系统动作频繁,增加了偏航动作电量损耗,同时缩短了偏航电气回路、偏航大部件寿命,因此需要结合偏航系统寿命影响情况和电量损耗情况进行评估和分析。
4 变桨零位校准
为了使风电机组能安全稳定、最大效率地吸收风能,需要定期校正叶片桨距角。由于桨叶标尺一般在叶根外部,空间狭小,人员观察校正零位操作很不方便,因此通常在外部校正零位后,在叶根内进行统一标记,方便每年进行叶片校零检查维护工作。
5 结语
根据环境温度动态调整风电机组切入风速和偏航控制风速阈值设定值,评估偏航系统部件寿命,在电量损耗情况下优化偏航系统控制逻辑,并做好偏航系统风向标校零和变桨桨叶校零维护工作等措施,可使风电机组在低风速情况下充分发挥发电能力,提高高电价上网电量,取得较好收益。
参考文献
[1]周明,武昭原,贺宜恒,等.兼顾中长期交易和风电参与的日前市场出清模型[J].中国科学:信息科学,2019,49(8):1050-1065.
[2]杨校生.风力发电技术与风电场工程[M].北京:化学工业出版社,2021.
[3]苏勋文,徐殿国,杨荣峰,等.考虑温度和湿度的风机最大功率跟踪控制[J].电工技术学报,2017(13):216-224.
[4]邓勇华,姜庆云,杨政厚.一种基于空气密度的调节风机切入的新机制[J].河南科技,2019(2):38-40.
[5]张国强,田宏哲,杨政厚.考虑空气密度变化的风电机组转矩控制算法研究[J].可再生能源,2020(1):62-67.
[6]刘斌斌,刘清河,李玉亮,等.某型双馈异步风电机组偏航误差分析及对策研究[J].风能,2023(1):90-95.
猜你喜欢
Bone Research(2021年2期)2021-09-11 06:02:56
智富时代(2018年7期)2018-09-03 03:47:26
中国科技博览(2016年25期)2016-12-20 18:30:36
汽车维护与修理(2016年10期)2016-07-10 08:17:41
科技视界(2015年25期)2015-09-01 17:45:39
中国高新技术企业(2015年29期)2015-08-11 22:54:37
电子技术与软件工程(2015年6期)2015-04-20 16:26:18
卷宗(2014年8期)2014-09-25 02:45:18
振动、测试与诊断(2014年1期)2014-03-01 01:13:44
河南科技(2014年15期)2014-02-27 14:12:43
