
黄浦江核心区水域陆海空联动巡航模式研究
2024-12-07 00:00:00鲁一帆 郭文强 苏泽
航海 2024年6期




摘 要:本文以无人机为核心开展讨论,研究如何在黄浦江核心区水域建立“陆海空”一体化的水上交通运输安全保障体系,以提升海事监管的效率与响应能力。针对黄浦江核心区域的通航条件及当前监管体系,探究无人机、巡逻艇与电子巡航系统之间的联动机制。研究结合潮水巡航、游览船高峰期巡航、重点护航和应急处置等不同场景的实际应用,提出了具体的联动操作流程和策略。研究结果显示,将无人机、巡逻艇与电子巡航系统三者有机结合的联动模式,极大提升了海事行动的即时响应能力、精确度及工作效率,同时显著降低了事故发生的概率,进而优化了水域安全管理的整体水平。结论表明,多种巡航技术的协同运用对于黄浦江水域的安全监管能力有着显著增强作用,为了更充分地发掘新技术的潜力,实现海事监管效能的最大化,该模式仍需在实践中不断迭代与优化。
关键词:黄浦江核心区;水上交通安全;联动巡航;海事监管
中图分类号:U697.1
文献标志码:A
0 引 言
随着海事领域“革命化、正规化、专业化、职业化”进程的稳步前行,海事监管现代化手段日新月异,其中,轮艇巡航、电子巡航与无人机巡航等多种先进巡航方式已广泛融入日常。本文聚焦于无人机技术的核心作用,旨在深入剖析如何在黄浦江核心水域实现多样化巡航模式的高效联动,从而构建起“陆海空”一体化的水上交通运输安全保障体系。
1 黄浦江核心区水域通航环境
黄浦江水域,自吴淞口101号灯浮延伸至闵行发电厂,是一条宽度不一、水深不等、弯头众多的狭窄水道。航道全长约67 km,江面最宽约800 m、最窄仅约300 m,有9个主要弯道,其中陆家嘴弯道弯度最大,达115°。核心区主要水域自黄浦江上游临浦轮渡站浦东、浦西码头上角连线,下游到杨浦大桥上边缘线为界,全长10.1 n mile,活动水域交通状况复杂,客运船舶流量大、弯头多、支流多、船舶种类繁杂,呈现“五多”特点。
上海港为非正规半日潮,每24 h 50 min出现两涨两落,船舶习惯于乘潮航行,涨、落潮转流前后2 h左右船舶流量很大、密度很高。小型船舶一般在吴淞低潮后、初涨前经吴淞口密集上驶,流量高峰时段持续2~3 h。万吨级以上的大型重载船舶,一般是乘涨潮流进吴淞口,在平流或初落时抵靠码头。夜间游览高峰时段游览船码头繁忙,2023年暑期,游览船客运量达100.08万人次,同比2019年增长13.09%,日均开航84艘次,日均接待游客2.08万人次;2024年暑期,游览船日均开航116艘次,日均接待游客2.08万人次,单日最高载客量达2.99万人次。
2 现有监管模式
18068863fdbd975ecacd71a53e1d4c7c1)轮艇巡航:海事巡逻艇是海事局的重要巡航工具,可以到达VTS、CCTV、岸基AIS等系统无法覆盖或到达的水域,受船艇平台限制,存在建设运维成本高、人力资源占用多、反应速度慢等问题。
2)CCTV视频监控:CCTV视频监控是黄浦江内河水域重要的监管手段,视频探头包括全景、球机和高变焦探头,基本可以做到水域全覆盖,并对指定水域进行监控回放。
(3)船舶交通管理系统:船舶交通管理系统VTS本身集成了船舶自动识别系统(AIS)、雷达等功能信息,加上智慧海事监管平台的融合,基本实现了“大交管”信息互通共享。
4)无人机巡航:无人机巡航作为现代化新型巡航手段,已经逐步成为巡航的重要力量,具有响应快、范围广、能耗低的优势,配上高倍变焦镜头和喊话器,成为立体高空机动监管的最佳选择。
5)定向喊话:作为传统甚高频喊话提醒的有效替代方式,黄浦江核心区增设定向喊话平台,通过追踪过境船舶进行定向喊话,加强驾驶员警觉性,一定程度遏制疲劳驾驶事故发生。
3 陆海空联动巡航场景
无人机在多方面的海事行动中发挥关键作用,通过与巡逻艇和电子巡航系统的三方协作,能够显著提升海事行动的效率及应急响应的实时性和准确性。这种整合不仅革新了传统的通航管理模式,还显著拓宽了无人机在海事监管领域的应用边界。
3.1 无人机与巡逻艇、电子巡航的三方联动
(1)场景一:潮水巡航
在现代海事运营中,潮水巡航的安全性和效率显著依赖于先进技术的整合应用。其中,无人机、巡逻艇和电子巡航系统的三方联动提供了一种创新性的解决方案,如图1所示。
在此方案中,无人机利用其高空俯瞰的优势,实时捕捉并监控潮流动态与水文地质状况,而巡逻艇则依据这些精准信息,灵活调整船舶航行状态,从而确保水上航行的安全与畅通。电子巡航系统整合来自无人机和巡逻艇的数据,优化巡航路线,实现对复杂海域的有效管理。这一模式不仅显著提升了航行的安全保障水平,还极大增强了对复杂多变水文环境的应对能力。
具体而言,在航道繁忙的黄浦江区域,潮水巡航的三方联动操作需要各方分阶段分层次地紧密配合:
①无人机作为前线观察者,承担着实时数据收集的重要角色。监管部门需规划无人机执行定期飞行任务,利用机载摄像头及先进传感器,精准监测并记录潮水高度、流速、流向等关键数据,迅速捕捉因潮汐变动引发的海面异常情况,同时将这些实时数据同步传输至后方的电子巡航系统,以确保信息的即时性与准确性。
②两级电子巡航系统则作为指挥中心,负责整合来自无人机和巡逻艇的数据,并运用先进的数据处理技术进行分析和决策。电子巡航系统通过分析无人机传输过来的数据,并结合历史潮汐数据和天气预报,快速预测未来几小时内的潮汐情况,评估未来的潮水变化和潜在风险,为巡逻艇和无人机提供决策支持,确保各类海事任务的顺利进行。
③巡逻艇依据无人机传输的实时数据,灵活调整其航行路线,实现动态优化。在接收到来自无人机和电子巡航系统关于潮流和障碍物的提示信息后,巡逻艇可以迅速调整航向,避免潜在的海上风险,确保航行安全。
一般而言,黄浦江潮水为半日潮,保潮为一天两次,单次时段主要集中在涨水期间的2 h内。结合潮水期间船舶密集程度可将其细分为三个不同的时段。
第一时段:船舶流开始至船舶开始密集时段;
第二时段:船舶流密集时段;
第三时段:其他时段。
其中,密集时段指某个时段的船舶数量与总船舶数量的比例达到60%;较少时段指船舶数量与总船舶数量的比例小于20%。
针对不同时段的工作重心差异,可采取多样化的策略与手段来执行监控巡航工作,见表1。
表1 潮水时段巡航方式
第一时段采用新开河定点值守及二级电子巡航的巡航模式。通过定点值守,可以对特定区域的船舶动态和静态情况进行精准监控,确保及时发现潜在问题并通报指挥中心。同时,二级电子巡航系统实现了全天候不间断的监控,极大扩展了监控的覆盖范围并提升了监控的准确性。然而,该模式的灵活性较差,难以迅速应对突发状况,且高度依赖于技术设备,一旦设备出现故障,可能导致监控盲区或信息延迟。
第二时段采用巡逻艇水域巡航的监管模式。巡逻艇的机动性使其能够根据实时情况调整航线,特别是在掉头区和弯道等关键水域。巡逻艇能够迅速对现场违规行为采取直接干预措施,及时有效应对各类突发事件,从而显著提升航道的整体安全水平。然而,巡逻艇的活动范围有限,难以同时覆盖整个区域,且需要大量的人力和设备资源,特别是在高峰时段,可能导致资源紧张和管理压力增大。
第三时段以无人机巡航为主,二级电子巡航为辅。无人机凭借其高速覆盖大范围区域的能力,特别适宜在航道相对空闲的时段执行高效且全面的巡航监控任务。无人机悬停范围应尽量靠近主航道中心线的上空,通过使用语音广播等手段,监督提醒船舶遵守有关航道、航路、船舶定线制、水上交通管制等规定的情况,重点关注涉客船舶在重点水域的航行状态,提醒进口船舶注意与河岸两侧保持安全距离,避免出现滞航情况。该模式的运营成本相对较低,但也存在一定的限制,如无人机的续航时间有限,需频繁更换电池或进行维护,且受天气条件影响较大;再如无人机巡航高度依赖高精度导航和监控技术,技术故障或信号丢失可能导致监控中断。
(2)场景二:游览船高峰巡航
在旅游高峰期,无人机、巡逻艇和电子巡航系统协同工作,是保障游览船的顺畅航行重要手段。无人机进行空中巡视,实时传送游览区域的拥堵情况及潜在风险,巡逻艇则根据这些信息快速响应,管理船只流量,指导游览船合理调整行进路线。后方工作人员将通过电子巡航系统负责资源调度,确保所有船只能够高效安全运行。
以黄浦江核心段的水运情况为例,在实际的三方联动中,需要结合通航环境和船舶交通流规律的动态变化,科学分析辖区内的游览船巡航时段,制定相应地每日“游览船航班计划表”巡航方式。
一般而言,工作日内游览船高峰时段主要集中在1830-2200时。进一步地,结合一天之内的航班密集程度可将其分为三个不同的时段。
第一时段:1830时至航班开始密集时段;
第二时段:游览船航班密集时段;
第三时段:其他时段。
其中,密集时段指某个时段的航班数量与总航班数量的比例达到60%;较少时段指航班数量与总航班数量的比例小于20%。这一比例的确定可以基于交通流量理论、运输需求分析和拥挤度与服务水平分析论证得到:
根据交通流量理论,当某个时段的航班数量占比达到60%时,意味着该时段的流量高度集中,表明此时航道正处在交通高峰期,意味着系统内部资源的高强度使用,因此可将其合理地定义为“密集时段”。与此同时,基于运输需求分析可知,需求的波动性可直接影响航班的分布,高需求时段通常对应着航班数量的集中,当航班占比达到60%时,系统处于高负载状态,而需求低谷期往往对应着航班数量的显著减少,当占比低于20%时,系统将处于低负载状态,故可将其定义为“较少时段”。此外,拥挤度与服务水平分析同样能够支持这种划分,一般而言在高密集度时段,系统容易出现拥堵,服务质量明显下降的情况,而在较少时段,尽管流量较低,但是系统运转却更为顺畅,服务质量也相对较高。基于这些理论及实际的现场反馈,在一定程度上证明了使用60%和20%的比例来划分密集时段和较少时段是科学合理的。
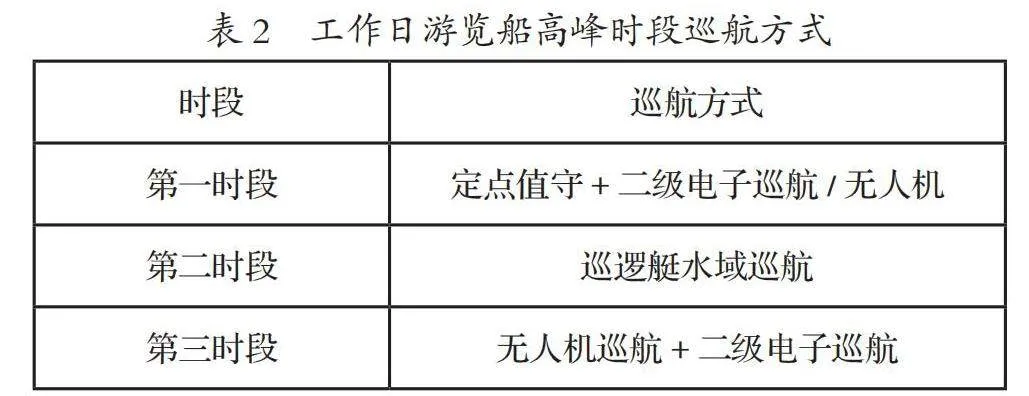
针对各时段的工作重点不同,可以采取灵活多变的策略与方法来执行监控巡航任务,见表2。
第一时段采用新开河定点值守及二级电子巡航的巡航模式,对辖区船舶动态、静态情况进行持续监控,以“三游一渡”涉客船舶为重点,做好重点监控工作,发现问题及时通报指挥中心。
第二时段采用巡逻艇水域巡航的监管模式,适时调整航线,维护游览船、游艇安全航行,重点加强掉头区以及涉客船舶码头前的水域掉头和靠离泊的秩序管理。
第三时段以无人机巡航为主,二级电子巡航为辅。无人机悬停范围应尽量靠近主航道中心线的上空,通过使用语音广播等手段,监督提醒船舶遵守有关航道、航路、船舶定线制、水上交通管制等规定的情况,重点关注涉客船舶在重点水域的航行状态,提醒涉客船舶注意与河岸两侧保持安全距离,避免出现滞航情况。
遇到双峰叠加的情况,巡逻艇要全程出动,在三号掉头区、十六铺与南浦大桥附近做好掉头区以及靠泊码头的维护。
(3)场景三:重点护航
在重要航道或关键时期的重点护航中,三方联动尤为重要。无人机在空中执行监控任务,迅速覆盖辽阔海域,实时侦测并精准识别一切潜在威胁。巡逻艇则依据无人机提供的即时信息,迅速做出反应,实施精确有效的干预或拦截行动。电子巡航系统则在整个过程中提供指挥和控制支持,优化护航策略,确保行动的高效和安全,见图2。
对于重点护航的船只,在采取三方联动措施的过程中,要能够实现不同机动装备的之间有效互动及实时监控。对于重要商船或旅游船的安全重点护航,需要海事部门在执行相应任务的过程中及早发现潜在的威胁和风险,并提前做好规划措施。
①对于无人机而言,一般建议至少部署2架,以保证能够对船只前进方向的5 n mile及左右3 n mile范围内的实时空中监控。对于特殊的危险情况,如检测到未经授权的船只存在异常活动时,无人机应即时发送实时图像和位置数据,确保护航行动的先发制人和信息准确性。无人机能够在空中持续监控,实时捕捉航道上的动静,确保任何异常情况都能在第一时间被识别并上报,支持其他联动装备的快速决策和行动。然而,无人机的续航时间存在局限性,需要频繁更换电池或充电,这在执行长时间护航任务时构成了制约。此外,无人机的操作易受到天气状况的干扰,诸如大风、大雨等恶劣天气条件会削弱其飞行稳定性并降低监控效能。无人机还高度仰赖导航与通信技术,一旦这些设备发生故障或信号传输遭遇中断,将会直接导致监控活动中断或数据传输延迟,进而可能对整个护航行动的连贯性和效率产生不利影响。
②巡逻艇应在接收到威胁警报后的5分钟内作出响应,并立即到达可能的威胁区域,进行针对性的干预或拦截,提供及时的保护。条件许可的情况下,需在重要船只周围配备巡逻艇,确保无死角监控,以便有效实施威慑和防御。尽管巡逻艇具有较强的机动性,但其实际覆盖范围相对有限,尤其是在面对广阔海域的护航任务时,难以独立完成全面的监控工作,需要配合无人机等装备进行联动。此外,巡逻艇的运行需要大量的人力和物资支持,长时间的高强度任务可能导致资源消耗过大,尤其是在高风险的护航任务中,可能会使巡逻艇的可用性受到限制。
③电子巡航系统则需保持高频率的数据更新,及时更新航行状况,分析潜在风险并提供航线调整建议,根据实时情况快速调整重要船只的航行路径。电子巡航系统在护航过程中充当了指挥中枢的角色,能够实时监控全局,协调无人机和巡逻艇的行动,确保护航行动的统一性和高效性。同时,系统可以根据实时情况迅速调整护航策略,灵活应对突发事件。由于电子巡航系统依赖于高效的通信网络和精准的数据传输,任何通信故障或数据延迟都可能影响决策的及时性和准确性,进而影响整个护航行动的成效。因为需要整合多方数据并进行实时分析,电子巡航系统的操作复杂性较高,要求操作人员具备较强的技术背景和应急处理能力,否则在紧急情况下可能导致反应不够迅速。
(4)场景四:应急处置
在紧急状况下,无人机的迅速部署能力显得尤为重要。它能够即刻抵达事故现场,迅速执行空中侦察任务,并将图像和数据实时反馈。巡逻艇依据这些信息迅速定位并执行救援。电子巡航系统则进行后勤支持,优化救援行动,并实时监控救援区域的其他船只和潜在障碍,提高救援成功率。在资源和人力相对有限的情况下,合理利用无人机能够大幅度提高救援行动的效率,并有效减轻巡逻艇在人力成本方面的负担,见图3。
在接到报警后,海事局应立即部署无人机,并争取在最短的时间飞达事故现场。基于无人机自身配备的专业监测设备,如红外线和光学摄像头,使得其能够在夜间或恶劣天气条件下都能进行有效监测借助无人机能够迅速对事故区域实施空中侦察,实时传输事故现场的高清画面、精确位置以及周边海域的环境状况。同时,无人机还能密切监测并记录海上风速及流向,为后续灾害处置工作提供坚实有力的信息支撑与决策依据。
其次,根据无人机提供的精确坐标,巡逻艇能够快速移动到指定位置,并提前携带必要的灾害应急处置设备,用于事故现场的救援和处置,同时根据无人机提供的动态信息调整救援策略,尽可能降低事故灾害的风险程度。
而电子巡航系统作为指挥控制中心,将会实时接收并分析来自无人机和巡逻艇的数据。系统利用先进的算法,模拟追踪海上事故的危险程度和影响范围,制定相应的救援方案。
4 结 语
随着交通强国建设不断推进,新技术、新手段的不断应用,“陆海空”一体化水上交通运输安全保障体系和全要素水上“大交管”的时代已经来临,但对于多种可用监管手段的模式切换才刚刚起步,如何最大化利用新科技、发挥最大监管效能,需要在实践中不断总结探索更为完善高效的切换模式,才能更有效地发挥海事监管职能,维护水上安全环境。
参考文献
[1] 毛俊远,单瑞海,乔国栋,等.无人机技术在海事监管领域应用研究[J].中国海事,2024,(05):9-11.DOI:10.16831/j.cnki.issn1673-2278.2024.05.003.
[2] 郝勇,李翌阳,陈仕祥,等.电子巡航系统信息特征及在海事监管中的应用[J].中国航海,2014,37(01):11-15+47.
[3] 李培娴,杨锦东.立体监管模式下海事巡逻船信息系统建设思路及发展方向[J].水运工程,2016,(S1):112-115.DOI:10.16233/j.cnki.issn1002-4972.2016.s1.025.
[4] 程迈,吴建军,张鼎桥,等.海事管理机构数字化转型浅析[J].水运管理,2024,46(04):17-19.DOI:10.13340/j.jsm.2024.04.011.
[5] 成旭,蔡宏伟,张卫星,等.网格化海事动态监管模式下的船舶交通管理[J].中国航海,2012,35(04):90-95.
[6] 朱加高,陈建华.VTS的效用及中国VTS管理现状[J].大连海事大学学报,2008,34(S1):30-33.DOI:10.16411/j.cnki.issn1006-7736.2008.s1.013.
作者简介:
鲁一帆,黄浦海事局外滩海巡执法大队四级主办,15175729215
苏泽,黄浦海事局外滩海巡执法大队四级主办,18635580711
郭文强,黄浦海事局外滩海巡执法大队一级行政执法员,15221001319
