
不同地形中GNSS辅助空三实景三维建模精度分析
2024-12-06 00:00:00杨忠凯何响世李昌凯
中国新技术新产品 2024年21期







摘 要:对无人机倾斜摄影实景进行三维建模,常见的地形主要包括平坦地、丘陵地和山地,规范对这3种地形的精度要求是不同的。目前实景三维建模的构建主要包括基于像控点和基于GNSS辅助空中三角测量的方法,当采用GNSS辅助空三测量时,POS数据的精度是影响最终成果精度的关键因素。利用PPK和网络RTK融合处理可以提高POS数据可靠性和精度,在不同的地形类别的三维建模中对该方法进行验证,结果表明,采用PPK和网络RTK融合处理后,在不同的地形中,实景三维模型的精度相当,并均能满足规范要求。
关键词:无人机;倾斜摄影;实景三维建模;GNSS
中图分类号:TP 391" " " " " " 文献标志码:A
与传统航测相比,无人机航测技术具有便捷、高效以及成本较低的特点,因此在规划设计[1]、工程建设[2]、不动产测绘[3]、数字城市建设[4]以及矿山治理[5]等现代化的测绘工作中得到广泛应用。在以上不同领域中应用涉及无人机航测的一个重要方面,即无人机倾斜摄影实景三维建模。在专业航测无人机中有惯性测量系统(Inertial Measurement Unit,IMU)和差分全球定位系统(Differential Global Position System,DGP)集成的无人机定向系统,即POS(Position Orientation System,POS)。POS利用姿态测量系统(Inertial Navigation System,INS)和机载GNSS全球卫星导航系统(Global Navigation Satellite System,GNSS)得到像片的6个外方位元素(3个直线元素,即摄影中心在选定坐标系的坐标值;3个角元素,描述像片的空间姿态)。三维建模软件基于POS数据以GNSS辅助空中三角测量(简称“空三”)的方式,结合航摄影像完成三维模型构建。无人机倾斜摄影往往要面对不同类型的地形,通常情况下主要包括平坦地、丘陵地和山地,规范对这3类地形的精度限差要求是不同的,只有保证 POS 数据的精度和可靠性,才能保证在不同的地形类别中精度限差均能满足规范要求。
1 GNSS辅助空三测量实景三维建模
无人机倾斜摄影实景三维建模结合虚拟现实技术和三维可视化技术,使用无人机搭载专业的航摄相机,从空中以不同角度对地表拍摄若干影像,利用这些航摄影像进行摄影测量,构建三维模型。采用这种方式构建的三维模型具备真实纹理和贴近现实的地形地物结构,因此称为实景三维模型。其基本原理是基于传统摄影测量的共线方程经过像对选取、密集点云匹配、三角网构建、纹理映射、模型存储和命名等过程,最终构建三维模型。
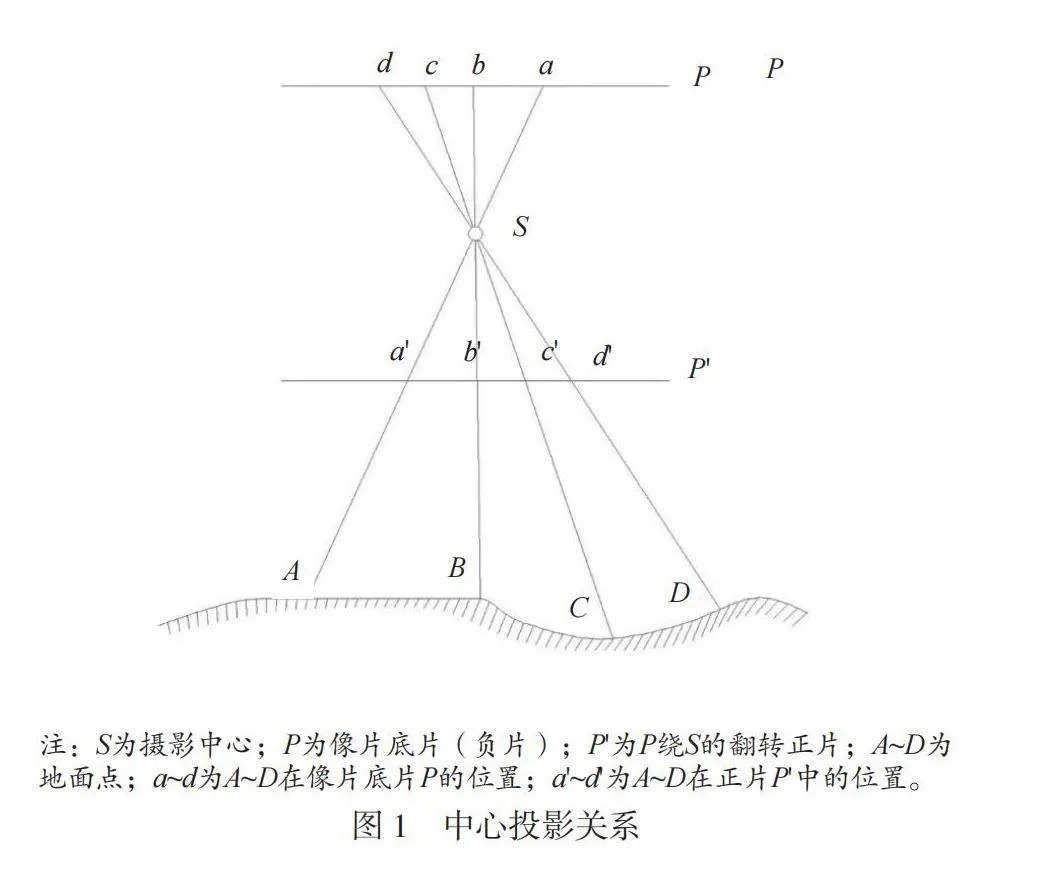
在传统的摄影测量中,当航摄相机拍摄影像时,地面光线经过物镜后在底片中成像,获得航摄像片。此时物镜中心为投影中心,底片为投影面,数字航摄与其类似。由于地面点的光线汇聚于物镜中心,因此航摄像片是地面的中心投影,其关系如图1所示。共线方程即中心投影的构像方程,其表述的是像点a、摄影中心S与地面点A的相互关系,即三点共线,共线方程如公式(1)所示。
(1)
式中:x、y为以像主点为原点的像点坐标;f为像片主距;ai、bi和ci(i=1,2,3)为3个外方位角元素的方向余弦;X、Y和Z为地面点A的坐标;Xs、Ys和Zs为地面摄影测量坐标系中摄影中心S的坐标。
摄影测量的基本原理是摄影光束相交获取地面点的点位,这个过程需要利用像片的6个外方位元素构建共线方程,计算地面点坐标。传统摄影测量利用外业测量的像片控制点,采用解析空三测量的方法获取像片的外方位元素。无人机的POS系统可以直接获取航摄瞬间像片的全部6个外方位元素,即理论上不需要布设像控点。GNSS相位中心与其在像方坐标系中的坐标的关系如公式(2)所示。
(2)
式中:XA、YA和ZA为机载GNSS相位中心在大地坐标系中的坐标;XS、YS和ZS为航摄仪投影中心坐标;R为方向余弦组成的3×3正交旋转矩阵;u、v和w为GNSS相位中心在像方坐标系的坐标。
INS测定的相机姿态角与外方位角元素的关系如公式(3)所示。
(3)
式中:φ、ω和κ为INS系统测定的相机姿态角。
公式(1)~公式(3)构成了影像的外方位元素和定向参数的关系,也是GNSS辅助空三实景三维建模的基础。基于以上关系,利用POS系统的观测值构建误差方程,采用最小二乘法求解点的三维坐标和外方位元素平差值,最终完成GNSS辅助空三测量实景三维建模[6]。
2 PPK与网络RTK融合处理技术
由无人机POS系统的组成可知,其在测定像片的外方位元素的过程中,角元素由INS系统测量,其精度由INS系统本身决定。线元素由GNSS系统测量,其精度与观测方式和观测条件有统计学意义,通常可以采用2种方法,即动态后处理(Post Processed Kinematic,PPK)和实时动态差分(Real Time Kinematic,RTK)。这2种方法的基本原理一致,在已知点位置架设GNSS基准站,与流动站一起进行GNSS观测,利用已知点计算误差改正数,利用数据通信链路将误差改正数发给流动站,可以大幅提高定位精度,区别是RTK的这个过程是实时的,PPK的这个过程是事后的。其改正数的表达式如公式(4)所示。
(4)
式中:V为差分改正数;ti为历元时刻;Δt为时延;V(ti+Δt)为顾及Δt的差分改正数;V(ti)为当历元为ti时的差分改正数;Δt为时延。
网络 RTK 技术是一种新的RTK定位技术,出现于20世纪 90 年代,并从2010年左右开始快速发展,其以CORS系统(Continuously Operating Reference Stations,CORS)为核心,根据区域基准站网的观测值,利用网络的数据通信链路实时播发改正信息。PPK的优点是受地形限制较小,定位精度高。缺点是必须经过事后处理,无法实时定位,在地形有遮挡的区域,会受网络信号强度的影响,有较高概率出现流动站与基准站断连导致定位丢失的情况。当采用网络RTK技术进行观测时,在区域基准站网中其改正数的计算(最小方差法)过程如公式(5)所示。
Vu=P1V1+P2V2+P3V3+…+PnVn" " (5)
式中:Vu为总改正数;Pn为基准站的权;Vn为第n个基准站的改正数。
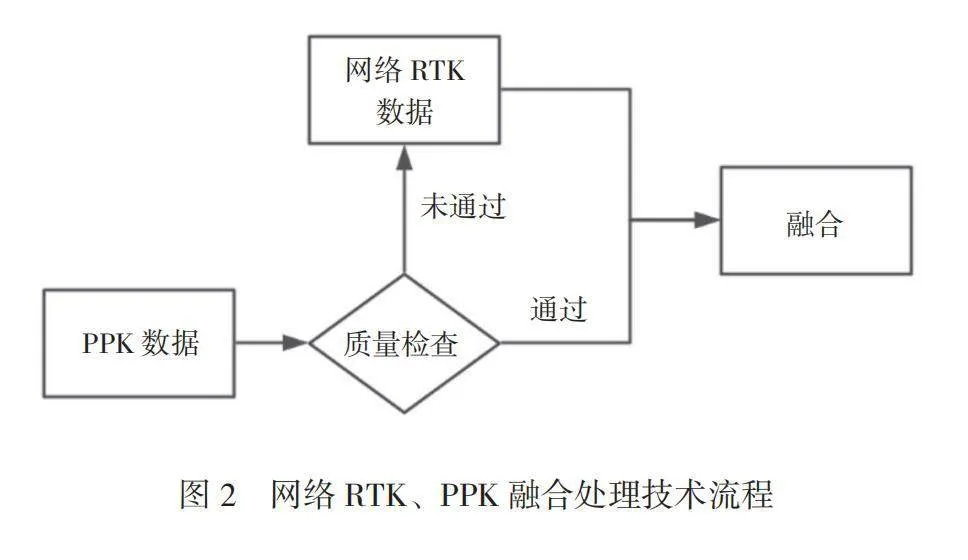
综合网络RTK和PPK的优缺点,将两者的数据进行融合处理,其具体操作方法有以下2种。1)地面架设GNSS静态观测基准站,在无人机飞行全过程中保持静态观测,事后结合无人机的机载观测数据和地面静态观测数据将机载观测数据进行解算,得到相对于地面基准站的高精度位置信息。2)无人机利用移动网络接入CORS账号,获得网络RTK定位服务,任务结束后将PPK数据和网络RTK数据进行融合,保留两者中观测精度较高的数据,数据取舍原则如下:优先使用PPK数据,如果PPK数据质量不佳,那么采用网络RTK数据,其技术流程如图2所示。采用这种方式处理的POS数据精度高,可靠性强[7-10]。在通常情况下,大部分PPK数据和网络RTK数据质量较高,将两者进行融合处理并比较其坐标值,排除观测中可能出现的粗差。
3 技术路线
当分析在不同地形中实景三维模型的精度时,为得到可靠的结论,制定的技术路线须排除外界因素导致的系统误差,包括以下5个步骤。1)选定测区。测区要求具有不同的地形类别,包括平坦地、丘陵地和山地,测区面积尽量保持一致。2)无人机航飞。当航飞时采用相同的飞行参数。3)POS数据处理。采用网络RTK、PPK融合处理。4)三维建模。在相同的软件中,采用相同的方法进行三维建模。5)利用实测检查点检查三维模型精度。
根据以上要求,最终选取3个地形具有不同代表性的测区,测区面积均在1 km²左右,地形包括平坦地、丘陵地和山地,这3种地形的地面倾角α为平坦地:α<2°;丘陵地:2°≤α<6°;山地:6°≤α<25°。测区情况统计见表1。选择飞马D2000多旋翼无人机搭载OP3000倾斜摄影模块来采集航摄影像。OP3000倾斜摄影模块共搭载了5个镜头,影像传感器中单位像元的物理宽度和高度都为 3.9 μm,包括1个下视镜头和4个倾斜镜头;在航线设计方面,决定采集测区分辨率优于5 cm的航摄影像,航高为300 m;在航飞完成后,在Context Capture Center软件中进行三维建模。精度验证的方法:在测区内布设覆盖整个测区的检查点,当利用检查点进行测量时,检查点的平面和高程中误差均不大于5cm。检查点的布设样式如图3所示。
4 作业过程
4.1 实景三维建模流程
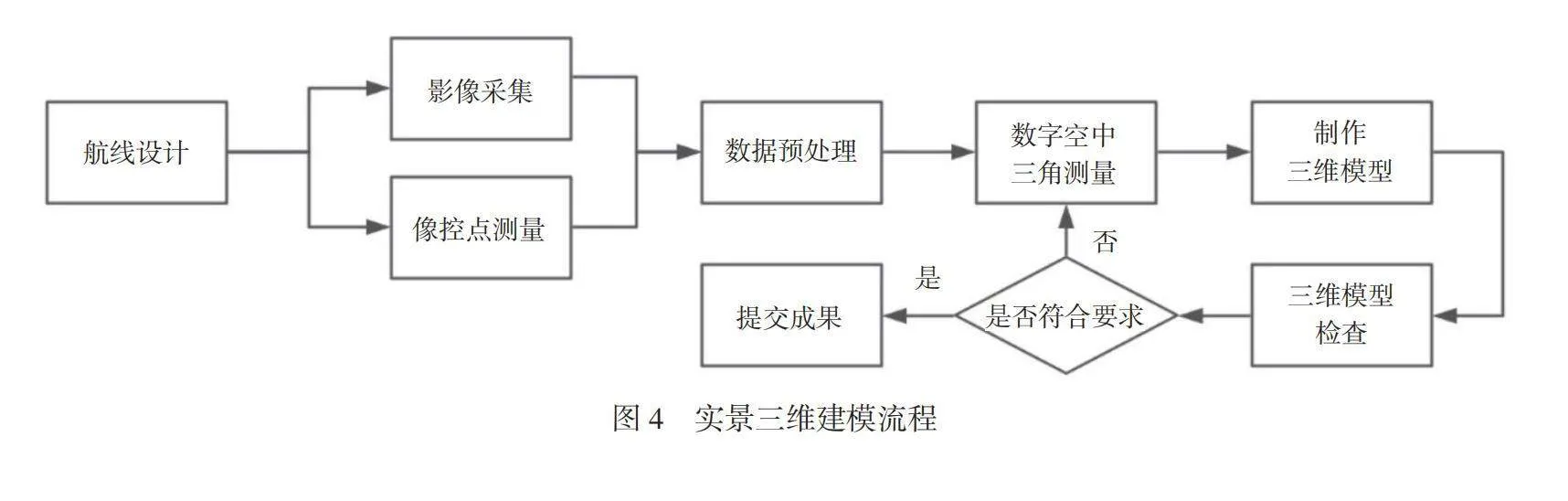
实景三维建模有以下7个流程。1)现场踏勘,选择起降场地和航线优化。2)像控点和检查点测量,如果采取免像控的方式,那么不需要测量像控点,检查点要求覆盖整个测区。3)无人机航飞。4)POS数据解算、坐标转换以及影像预处理。5)数字空中三角测量。6)三维模型构建。7)三维模型质量检查,包括三维模型整体外观质量检查、结构检查和精度检查等,满足相关要求后,进行模型整饰,提交成果。实景三维建模流程如图4所示。
4.2 无人机航飞和数据处理
为了在飞行的过程中尽可能地提高其定位精度,降低无人机当按照预设航线飞行时的偏差,飞行前须将无人机接入移动网络连接CORS账号,等待网络RTK定位成功,以保证无人机在飞行和起降过程中均具有厘米级的定位,提高飞行安全性。
在数据处理软件中输入地面静态观测站的经纬度和观测点的仪器垂高等信息,分别导入无人机机载GNSS观测数据和静态GNSS观测数据,分别进行PPK和网络RTK的POS数据处理,最终将2种数据进行融合处理。经过检查,3个测区的POS数据经融合处理后固定率均达到100%,即所有的POS数据均达到厘米级的精度。3个测区分别获取了1 825张、1 655张和1 850张高分辨率影像,影像质量满足三维建模的基本要求。
4.3 三维建模
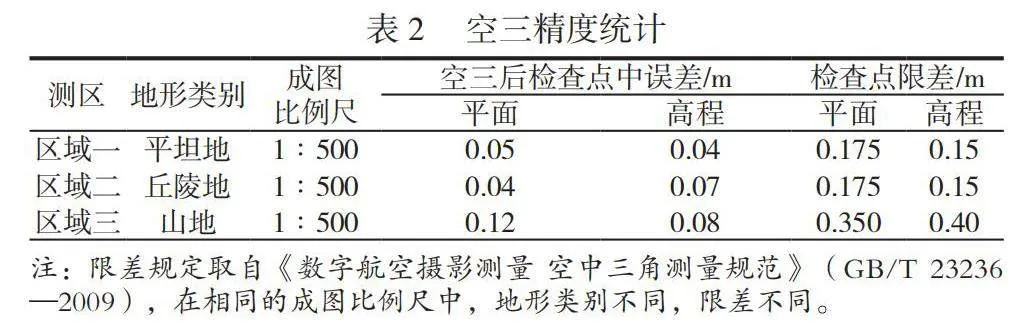
采用Smart3D和ContextCapture Center软件进行三维建模,ContextCapture Center软件具有很高的空三处理精度,并且在空三过程中会进行全场景整体匀色处理,模型观感较好。三维建模的处理方案:先在Smart3D软件中进行一次自由网空三处理,这次空三处理的目的是保证航摄影像具有足够的入网率,不要求具有较高的精度,可以选择刚体自由变换的模式,然后将空三结果导出为*.xml交换格式,再在ContextCapture Center软件中导入Smart3D的空三结果,基于POS数据重新进行空三测量和平差调整,以提高空三成果精度。在空三处理的过程中导入检查点进行精度检查,经检查点检查,3个测区的空三精度均满足《数字航空摄影测量 空中三角测量规范》(GB/T 23236—2009)的要求。空三精度统计见表2。
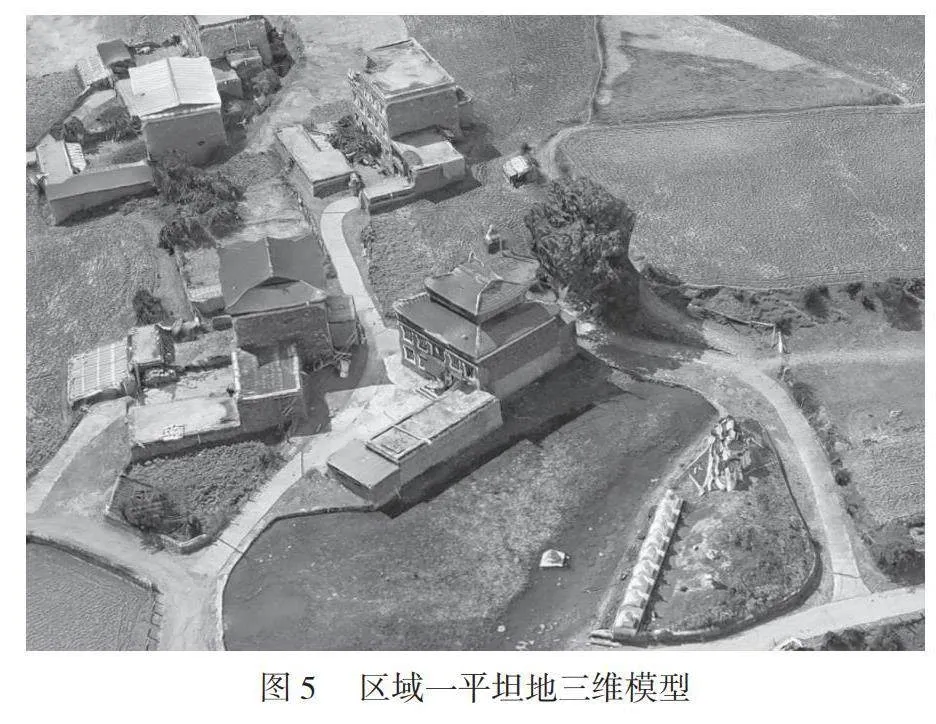
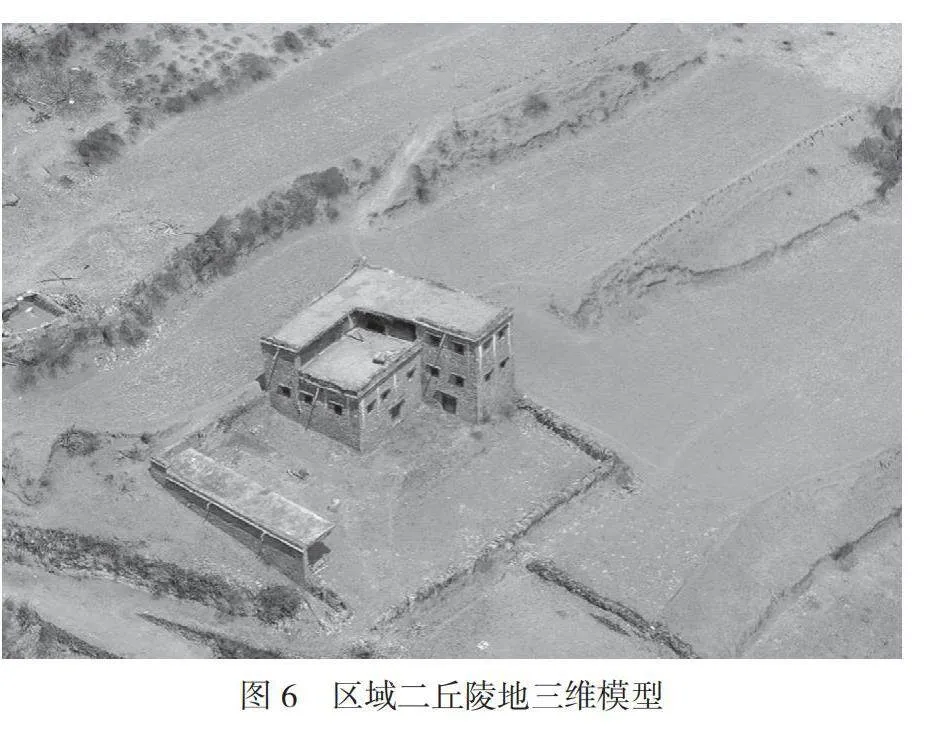
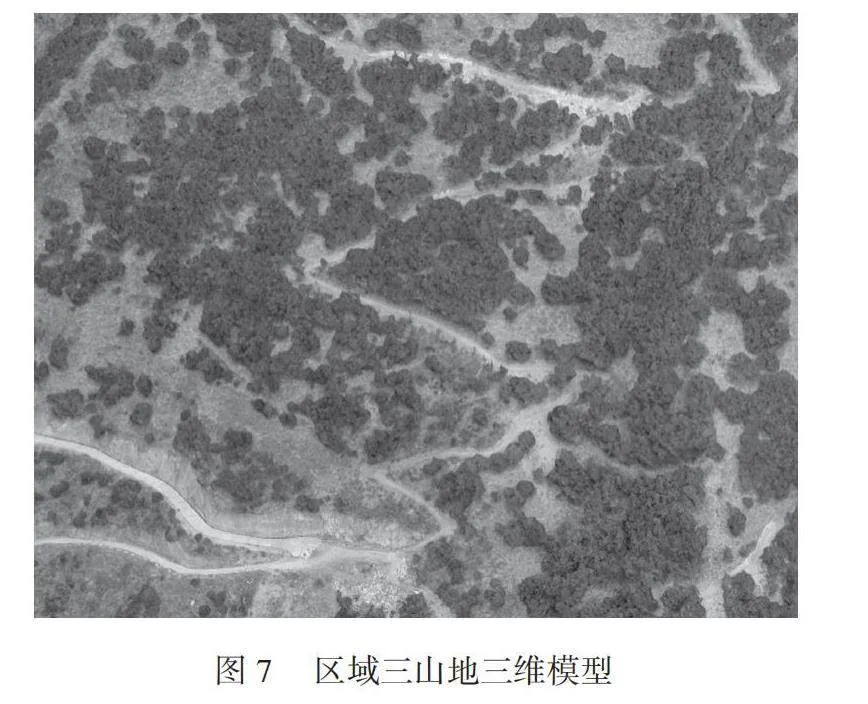
空三完成后,由软件自动化处理三维建模的过程。建模后进行质量检查,3个测区的三维模型结构关系正确,色彩贴近实际,明暗反差适中,各测区内不同区域的细节保存完好,整体模型质量较好。各测区三维模型效果如图5~图7所示。
5 三维模型精度统计
将检查点导入三维模型中,比较平面和高程差值来统计精度,检查点完整覆盖测区的各个区域。采用《测绘成果质量检查与验收》(GB/T 34256—2023)中同精度检测的方式计算中误差,如公式(6)所示。
(6)
式中:M为中误差;n为检查点数量;Δi为检查点较差。
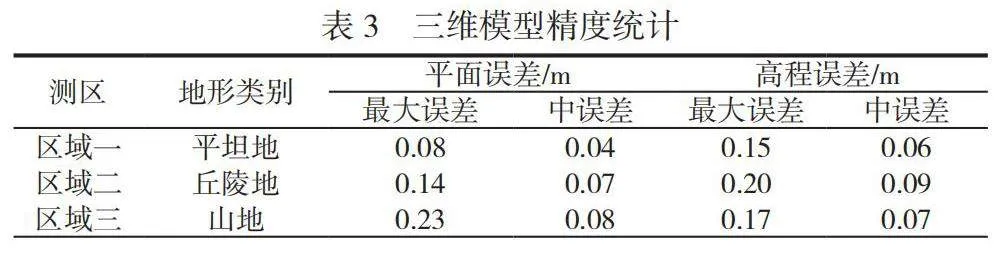
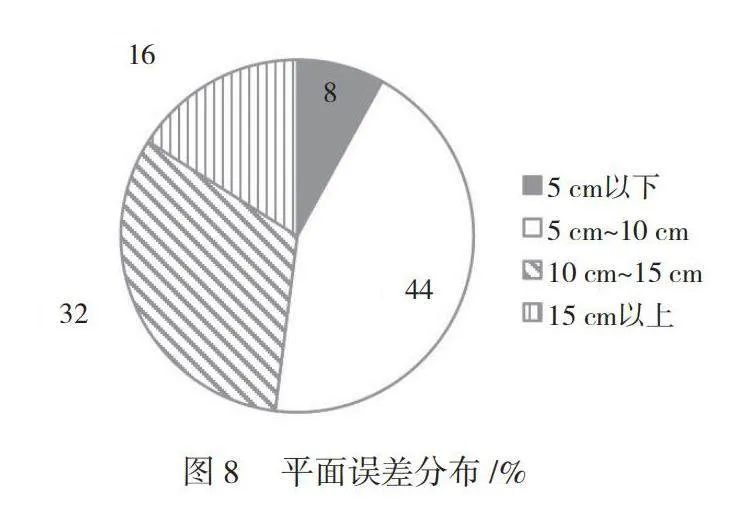
三维模型精度统计见表3,分测区统计中误差,判断不同类别地形对精度的影响。利用饼状图汇总统计大小不同的误差的占比,判断误差的分布关系。平面误差分布如图8所示,高程误差分布如图9所示。
各测区内的平面和高程精度基本相当,中误差均满足规范要求,平坦地的精度稍高于丘陵地和山地。根据《三维地理信息模型数据产品规范》(CH/T 9015—2012)中I级1∶500成图比例尺模型的误差限差:平面中误差≤0.3 m,高程中误差≤0.5 m,在不同地形条件下均满足规范要求。经过精度统计,平面误差和高程误差的大小分布比较集中,超过80%的点的平面和高程误差在15 cm(3倍地面分辨率)以内。
6 结语
当进行无人机倾斜摄影实景三维建模时,采用网络RTK和PPK融合的方式对POS数据进行处理,可以保证POS数据的精度,进而保证空三处理的精度,最终可以构建基于GNSS辅助定位的免像控高精度三维模型。采取这种方式对无人机POS数据进行处理后,在分辨率一定的情况下,虽然不同类别地形的三维模型精度有一些差异,但是综合比较平面和高程精度,总的来说其仍然在同一个等级,地形类别对三维模型的总体精度影响不大,并均能满足规范要求。
参考文献
[1]杨铭.新型测绘技术在道路竣工规划验收测量中的应用研究[J].测绘通报,2019(增刊2):226-229,234.
[2]范炜,朱烨,王会影,等.基于实景三维的建设工程规划设计方案辅助构建及审查[J].自然资源信息化,2023(6):13-18,31.
[3]赵永志.无人机倾斜摄影测量在农村房地一体中的应用研究[J].现代信息科技,2023,7(13):122-125.
[4]钟亮,赵胜治,陈彦志.无人机倾斜摄影测量在数字城市建设中的应用[J].测绘与空间地理信息,2023,46(9):202-204,208.
[5]闫宏昌.无人机低空摄影测量在矿山治理中的应用研究[J].测绘与空间地理信息,2024,47(4):62-64.
[6]张林杰,黄筱,饶维冬,等.网络RTK和PPK辅助水利工程免像控无人机倾斜摄影测量三维建模分析[J].测绘通报,2023(4):115-120.
[7]钱俊锦.无人机在高山区免像控三维建模航测方法研究[J].中国新技术新产品,2021(3):7-9.
[8]任智龙,李风贤,柴生亮,等.RTK和PPK融合差分技术的无人机摄影测量免像控测图精度实证[J].北京测绘,2022,36(9):1225-1230.
[9]胡玉祥,尹相宝,张洪德,等.GNSS PPK动态后处理测量作业模式与应用分析[J].测绘与空间地理信息,2022,45(11):65-66,70.
[10]田慧,宋中华.PPK和GPS-RTK在黄河三角洲海区测验中的数据对比分析[J].东北水利水电,2020,3(11):26-27,29.
猜你喜欢
中国新技术新产品(2017年14期)2017-07-07 16:23:04
中国科技博览(2017年4期)2017-05-19 11:12:49
科技创新导报(2016年26期)2017-03-13 19:54:36
中国科技纵横(2016年21期)2017-02-13 17:45:16
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
