
基于激光雷达的周界立体安防监测方法
2024-12-06 00:00:00崔亚东
中国新技术新产品 2024年21期


摘 要:为了提高重要场所周界防护的安全性,本文研究一种基本于激光雷达的周界立体安防监测方法。该方法设计了以激光雷达为基础的系统架构,引用先进激光雷达目标识别技术、立体坐标标定技术、视频自动跟踪技术,实现对周界的立体安防监测。在重要场所围墙内外侧、上方可形成一个立体空间防护警戒区域,进行全方位立体的报警监测。试验结果表明,该方法可精准定位入侵目标位置,联动视频跟踪并报警,形成了周界立体防护效果,大大提升安防等级水平,可应用于重要场所的周界安防。
关键词:激光雷达;周界;立体安防
中图分类号:TU 855 文献标志码:A
传统的重要场所,例如核电站、监所等周界防护技术手段大多采用电子围栏、红外对射、激光对射、泄漏电缆等,是以“线”的监测方式进行监测的,警戒区域存在很多盲区,且定位不准确,给安全管理带来一定的隐患。本文采用无缝覆盖“面”监测技术,实现对围墙外侧通道、围墙上方、内侧通道及空中的全覆盖监控,形成一个立体防护区域,达到对周界的无死角监控,对入侵目标精准跟踪,大大提高了安全智能化程度及保障水平[1-3]。
1 激光雷达立体安防系统架构设计
1.1 系统架构图
系统基于C/S构架,采用分布式架构设计。建设的激光雷达立体安全系统可集中管理雷达数据、展示位置、报警及视频等功能。激光雷达立体安防系统架构如图1所示。系统架构主要由终端应用层、服务管理层、网络传输层及前端感知层组成。
1.1.1 终端应用层
终端应用层主要是完成用户界面展示及配置管理功能,软件程序放置在管理终端中。终端软件采用平面电子地图,可在电子地图上展示所有监控信息,例如目标报警、轨迹、视频报警画面等,能够从全局视角对入侵目标进行管理。
1.1.2 服务管理层
服务管理层主要是完成前端感知传感器的接入、存储、管理等功能,同时将数据信息发送给终端应用层或者第三方接口。软件程序主要放置在服务器中。
服务器程序由主控服务程序软件模块、数据存储服务软件模块、视频服务软件模块及第三方接口程序模块组成。
1.1.3 网络传输层
网络传输层主要是由交换机或者光收发器组成的以太网络,实现前端感知设备与服务器的数据传输功能。
1.1.4 前端感知层
前端感知层主要由激光雷达、高速球机、声光告警等组成。
高速球形摄像机采用200万像素以上的高清球形摄像机,具备夜视功能,可清晰看清监控区域,并接收激光雷达的指令高速跟踪运动目标。
激光雷达采用探测角度不小于270°、探测频率不小于50Hz、探测半径30m/60m/100m等不同距离的雷达。
声光告警采用室外高分贝的告警设备,将告警信息接入激光雷达I/O口,实现报警控制。
1.2 系统功能设计
1.2.1 防区全覆盖、监控无死角、形成立体防护
采用激光平面扫描技术,在警戒区域安装激光雷达装置,实现对地面、围墙及空中的全覆盖、无死角的立体无缝防护。
1.2.2 精准定位、轨迹跟踪
采用先进的激光扫描技术,完全不同于传统安防技术,定位精度高,可达到厘米级的精准定位,实现对入侵目标的轨迹跟踪、实时距离显示[4]。
1.2.3 断电断网下独立工作,防止突发事件
激光雷达装置内置嵌入式模块及电池,可实现在断网、不联网的情况下独立工作,针对发生的突发事件,具有本地声光告警功能[5]。
1.2.4 防区、人员出入绿色通道灵活设置
根据现场复杂的环境,支持不同规则形状、不同数量的防区,可根据工作业务流程智能划定预警区、报警区以及人员绿色通道区域;在不增加前端感知终端数量的情况下,解决现场复杂问题。
1.2.5 多目标检测、报警自动视频跟踪
具有多目标检测、实时视频跟踪功能;当发现入侵目标时,可联动摄像机自动跟踪,不需要人员参与操作,实现了报警画面自动弹出、视频智能跟踪功能。
1.2.6 全天候工作
采用激光雷达为探测传感器,发送主动激光进行目标探测,在夜间也可正常工作,不需要照明补光,实现全天候的监控;采用905nm红外激光,人眼不可见,人眼安全,即安全又隐蔽。
1.3 主要性能设计
本文研究的基础设备为激光雷达,设计的主要性能参数如下。1)探测可达半径30m/60m/100m等不同距离。2)探测角度可达270°,实现监控区域无盲区覆盖。3)角分辨率支持0.25°/0.5°。4)安全等级1级,对人眼安全。5)扫描频率25Hz/50Hz。6)通信接口采用有线通信。7)断电断网情况下独立工作,前端监测装置具有嵌入式算法能力,在突发断电、断网的情况下,发现目标并驱动声光报警。8)报警区域自由设定,根据工作区可设置绿色通道、报警区、预警区,同时可按时间段自动布撤防。9)控制面板上具备布撤防按钮、报警按钮、取消报警按钮。
2 激光雷达立体安防系统模块构建
本文立体安防系统主要包括激光雷达目标识模块、视频跟踪模块及软件平台展示模块。
2.1 激光雷达目标识别模块
激光雷达是一种采用“光速—时间”飞行原理,通过高速扫描对二维场景(平面)进行复现的技术。设备将脉冲激光发射并接收反射信号,通过时间差计算目标物的距离;此测量过程在高速旋转过程中不断重复,得到多组不同角度下目标物距离数据。激光束发射的频率可达上万个脉冲,可获得目标距离、方位、速度甚至形状等参数,从而实现对目标的探测、跟踪和识别[6-7]。
本方法的目标识别模块主要是基于雷达点云,通过样本采集、特征提取、工程化设计完成目标识别算法。基于激光雷达点云的目标识别,对一帧点云数据进行聚类并提取目标线段,采集的大量试验数据获取各类目标的特征值参考区间,然后通过特征匹配的方式完成目标类别的识别[8]。形成初步目标识别算法后,再根据现场应用环境提取各种干扰因素,进行过滤,形成最终的可应用的目标识别算法。具体的技术路线如下。1)点云样本采集。利用激光雷达采集场景点云数据,并对采集的点云数据进行去噪、基本滤波操作,提高数据的质量和清晰度,再对点云数据进行分割,提取目标并进行特征计算,包括大小、形状、类型等。2)卡尔曼滤波应用。卡尔曼滤波是一种常用的滤波算法。采用卡尔曼滤波对动态目标的位置和速度进行准确估计,可以对动态目标进行准确跟踪,提取目标的轨迹、速度等信息。3)聚类算法。采用改进的聚类算法对前景点进行聚类。由于激光雷达数据具有离散性,且前景点中除了目标数据还存在噪声点,因此在聚类后需要进一步判断分析。
2.2 视频跟踪模块
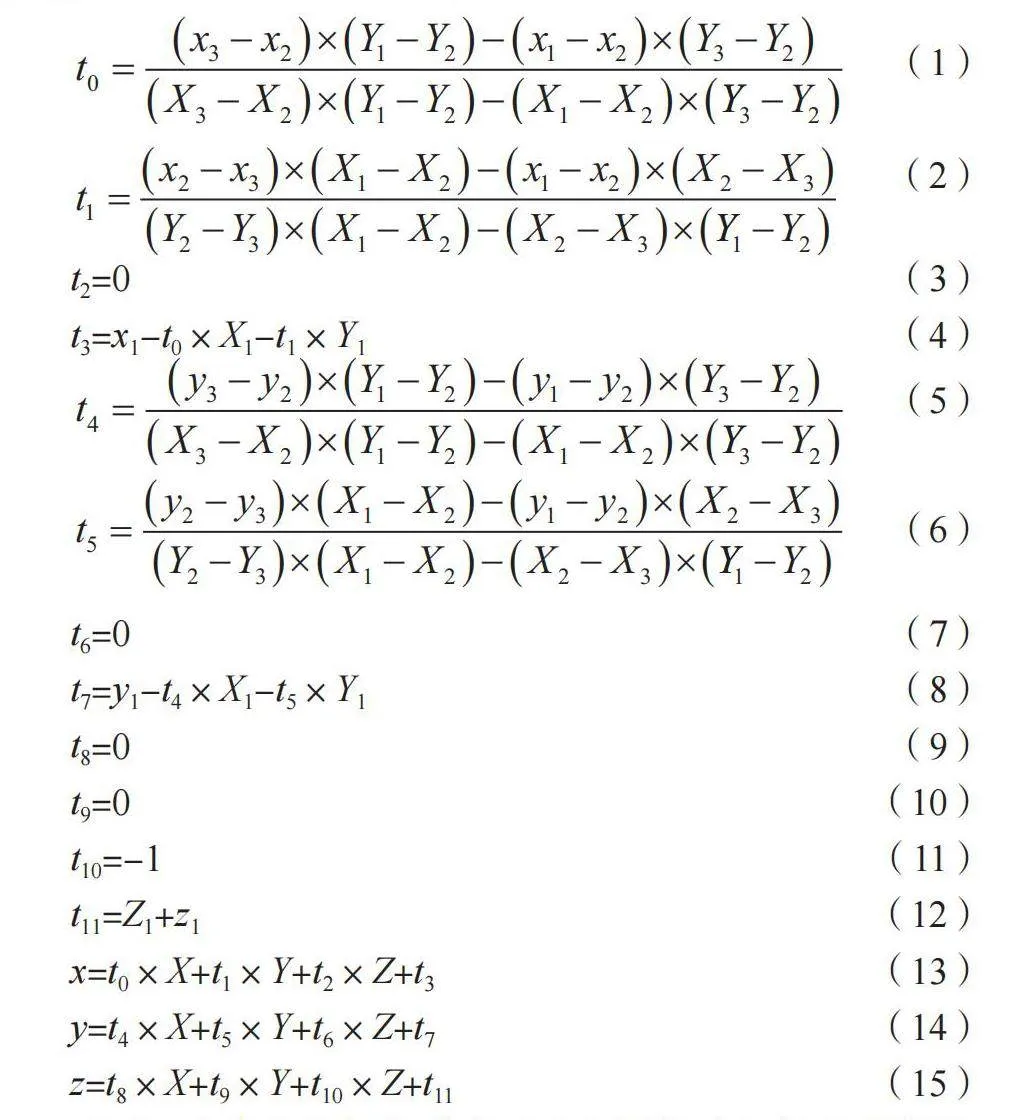
本方法采用高速网络球机进行目标跟踪,接收激光雷达的定位数据对目标物进行锁定和持续的跟踪和监控。平台接收激光雷达定位数据,通过三点标定法获取目标在摄像机中的坐标并控制网络球机和报警装置,实现整体的控制和管理。激光雷达和网络球机的世界坐标变换三点标定算法如下。1)选取三个坐标位置,对应球机和雷达的坐标分别如下。第一个点,(x1,y1,z1),(X1,Y1,Z1);第二个点,(x2,y2,z2),(X2,Y2,Z2);第三个点,(x3,y3,z3),(X3,Y3,Z3)。2)计算变换参数。坐标变换的参数计算如公式(1)~公式(12)所示。3)球机坐标(x,y,z)与雷达坐标(X,Y,Z)的变换过程如公式(13)~公式(15)所示。
(1)
(2)
t2=0 (3)
t3=x1-t0×X1-t1×Y1 (4)
(5)
(6)
t6=0 (7)
t7=y1-t4×X1-t5×Y1 (8)
t8=0 (9)
t9=0 (10)
t10=-1 (11)
t11=Z1+z1 (12)
x=t0×X+t1×Y+t2×Z+t3 (13)
y=t4×X+t5×Y+t6×Z+t7 (14)
z=t8×X+t9×Y+t10×Z+t11 (15)
通过3个点的坐标把激光雷达和网络球机标定到世界坐标系中,完成激光雷达和网络球机的坐标标定。当激光雷达检测到警戒区域内有目标时,通过球机坐标和雷达坐标的变换公式把目标物在激光雷达中的坐标变换为目标物在球机中的坐标,驱动球机跟踪目标物,完成云台全方位(左右/上下)移动及镜头变倍、变焦控制,使目标物完全展示在网络球机的图像中。
2.3 软件平台展示模块
本系统平台软件检测到入侵目标会触发报警,联动声光威慑,在全局地图上进行入侵目标轨迹显示,语音报警提示,并联动监控视频进行精准跟踪。系统平台软件功能如下。1)入侵目标监测功能,通过激光雷达扫描人员、车辆轨迹进行路线及位置的精准定位;监测中心可在电子地图上实时看到人员所处位置、轨迹、分布情况等内容[9-10]。2)视频联动功能,激光雷达检测到目标后通过内置算法,实现与球机联动控制,对入侵目标进行实时跟踪,确保入侵目标在视频画面中。3)全景地图功能,终端界面采用全景地图方式,在全景地图上展示入侵目标位置、视频、报警信息等。4)查询功能,可查询任意时间的历史告警数据、轨迹、视频信息等。5)运行状态巡检功能,系统具备自动检测功能,当监测装置出现故障时,在终端软件提示告警信息。
3 系统试验结果及分析
根据激光雷达监测方式不同,采用2种方式进行现场安装试验并进行效果测试,记录分析结果。
3.1 试验环境—水平扫描方式
水平扫描方式主要将激光雷达的扫描面平行于水平面进行监测,可实现对围墙内侧通道上方空间区域、内侧通道下方区域的监测。水平扫描示意图如图2所示。
3.1.1 内侧通道上方空间区域
在围墙上方空间区域形成一面不可见无缝的监测面,实现对攀爬墙、屋顶入侵目标的精准定位及报警,实现上空的覆盖。
3.1.2 内侧通道下方空间区域
在围墙内侧通道下方空间区域形成一面不可见无缝监测面,实现对内侧通道入侵行为的精准定位及报警。
3.1.3 报警区域自由设置
可根据现场复杂环境(人员通道、车辆通道等)划分告警区与不告警区。针对日常活动区域,按时间段自动布防及撤防。同时,根据工作需要设置绿色通道区域。
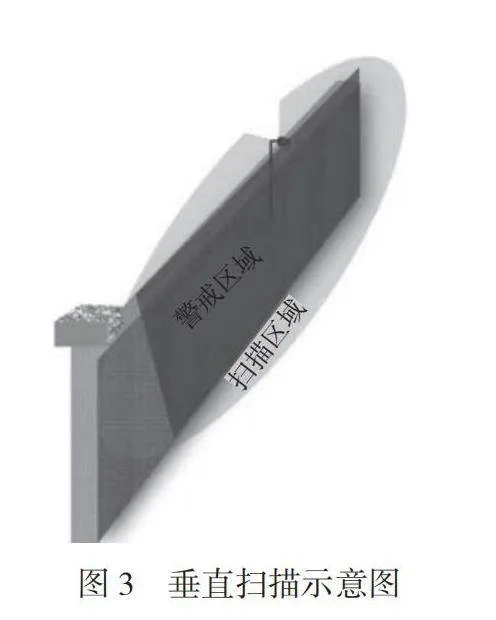
3.2 试验环境—垂直扫描方式
垂直扫描方式主要将激光雷达的扫描面垂直于水平面进行监测,实现对围墙上方空间区域、围墙下方区域的检测。垂直扫描示意图如图3所示。
3.2.1 围墙上方空间区域
在围墙上方空间区域形成一面不可见约0.5m~1m(可自由设置)的监测面,实现对攀爬墙、墙面行走人员的精准定位及报警。
3.2.2 围墙下方空间区域
在围墙下方空间区域形成一面不可见至地面的监测面。实现对墙下活动人员、穿墙入侵行为的精准定位及报警。红外对射、电子围栏不具备此功能。
3.2.3 报警区域自由设置
可根据现场复杂环境(树木、杂草等)划分告警区和不告警区。针对墙下活动区域,按时间段自动布防及撤防。同时,根据工作需要设置绿色通道区域。
3.3 试验结果分析
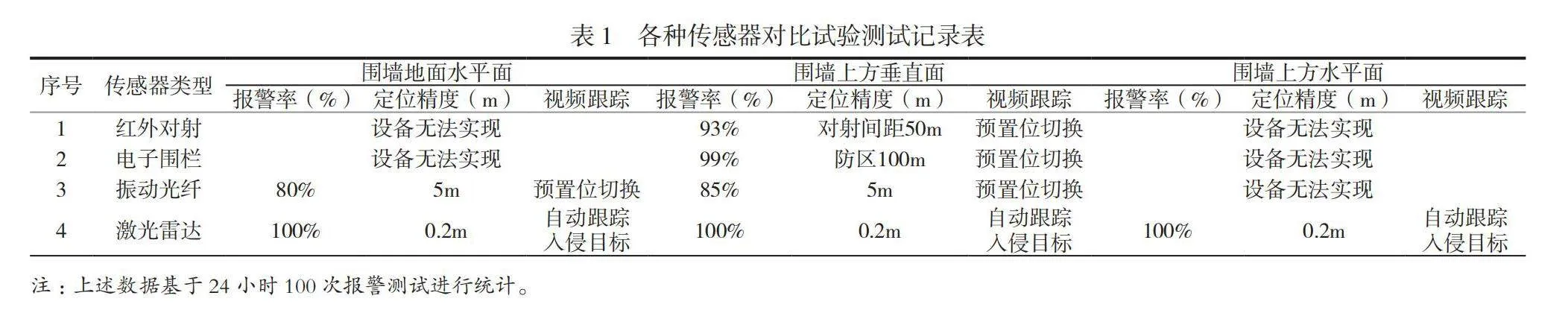
此次为了保证数据的准确性,选择监狱围墙通道进行试验,围墙已安装了红外对射、电子围栏及振动光纤传感器,进行4种传感对比测试,试验结果见表1。
将本文方法与其他传感器进行对比试验测试。从表1中可以准确看出,基于激光雷达的立体监测方法可适于水平面、垂直面等不同平面的扫描,形成立体空间防护,其他传感器不具备此条件。激光雷达具备精准定位、视频自动跟踪功能,其他传感器仅有防区报警,只能预置位联动,无法实现精准定位及视频跟踪。激光雷达可实现无盲区、精准定位入侵目标。该方法能够实现围墙周界的立体防护,解决围墙盲区隐患问题。因此,基于激光雷达的立体安防系统监测方法具有较高的实用性及推广价值。
4 结语
本文基于激光雷达的周界立体安防监测方法的研究解决了传统传感器只能以“线”监测技术的缺陷,采用无缝覆盖“面”监测技术,实现对警戒区域进行全覆盖的立体感知,具备轨迹跟踪、视频联动、绿色通道、防区灵活设置等优势,提升了安全性及管理水平。本文旨在为重要场所周界安防提供更可靠、更有效的技术手段,也能促进激光雷达在重要场所围墙安防的推广及应用。
参考文献
[1]沈亚.达州某看守所武警中队执勤安保信息系统设计[J].现代建筑电气,2022(2):34-38.
[2]郭子明.基于激光雷达点云的目标识别与跟踪方法[J].照明工程学报,2023(5):64-67.
[3]余博,杨森,王珣,等.基于激光雷达与视频结合的铁路异物探测技术研究[J].高速铁路技术,2023(1):48-53.
[4]孙嘉泽.轮式安防巡逻车定位及视觉感知算法研究[D].济南:山东大学,2022.
[5]孙学荣.单线激光雷达三维成像方法及应用[D].西安:西安电子科技大学,2022.
[6]方晓君.看守所急需“四化”的实战指挥系统[J].中国安防,2015(合刊2):40-43.
[7]张祥雨,闫华学,刘金彤.基于物联网的监所智慧安防设计与实现[J].警察技术,2022(1):15-19.
[8]刘湘黔,刘海妹,常浩.智能安防巡检机器人监控系统关键技术研究[J].中国新技术新产品,2024(7):12-14.
[9]李秀平.激光雷达动目标检测技术研究[D].桂林:桂林电子科技大学,2023.
[10]李懿,井伟.多激光雷达行人跟踪安防系统设计研究[J].信息与电脑(理论版),2022,34(16):125-127.
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
中国交通信息化(2021年8期)2021-11-02 05:26:02
汽车观察(2021年8期)2021-09-01 10:12:41
水上消防(2020年3期)2020-07-25 02:36:20
空间科学学报(2020年6期)2020-07-21 05:36:50
铁道通信信号(2019年4期)2019-10-10 03:42:48
铁道通信信号(2019年7期)2019-10-08 08:38:12
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
铁道通信信号(2018年3期)2018-04-19 02:32:48
