
基于云计算的智能交通云联网监控系统设计
2024-12-06 00:00:00曾斯
中国新技术新产品 2024年13期




摘要:本文针对传统交通监控系统画质低、准确率低和延迟高等问题,设计出一种基于云计算技术的智能交通云联网监控系统。在硬件设计方面,使用解码器与监控器为系统提供支持;在软件设计方面,从特征分类、模型训练和隐患检测等方面完成监控程序与外设间的数据交换,进而应用云计算对交通数据信息进行准确识别与分类。试验结果表明,与传统交通监控系统相比,本文系统监控画质良好、稳定性高,识别准确率也具有一定优势,能够满足智慧交通建设所需。
关键词:云计算;交通监控;车流量;交通数据
中图分类号:TP39""""""""" 文献标志码:A
交通监控系统负责收集各类交通信息,能够直观了解车辆运行状况与交通量,在提升道路使用效率与减少交通事故等方面为交通管理提供了必要辅助手段,对交通安全具有积极意义[1]。学界对交通监控系统的研究较早,例如屠康等综合利用ViT和Swin Transformer,设计了一种基于深度学习的交通检测系统,试验验证该系统在交通检测中具有较好的泛化能力[2];王茁等将图像处理技术引入监控系统,通过分布式计算拓展数据传送功能,并结合道路交通拥堵的判定条件预测道路运行状态,实现了交通情况的实时监测[3]。总结文献可知,目前这些传统交通监控系统的收集频率较低,信息冗余较多,常出现画质差、延迟高、准确率低和不稳定等问题。云计算技术具有较强的交通数据处理能力,在动态负载方面效果良好,能够满足智能交通监控的区域化与网格化服务。因此本文设计出一种基于云计算技术的智能交通云联网监控系统。该系统改进了编码流程,与传统交通监控系统相比,能够显著提升画质与准确率,有效降低整体延迟,具有良好的监控实时性与应用性。
1整体设计
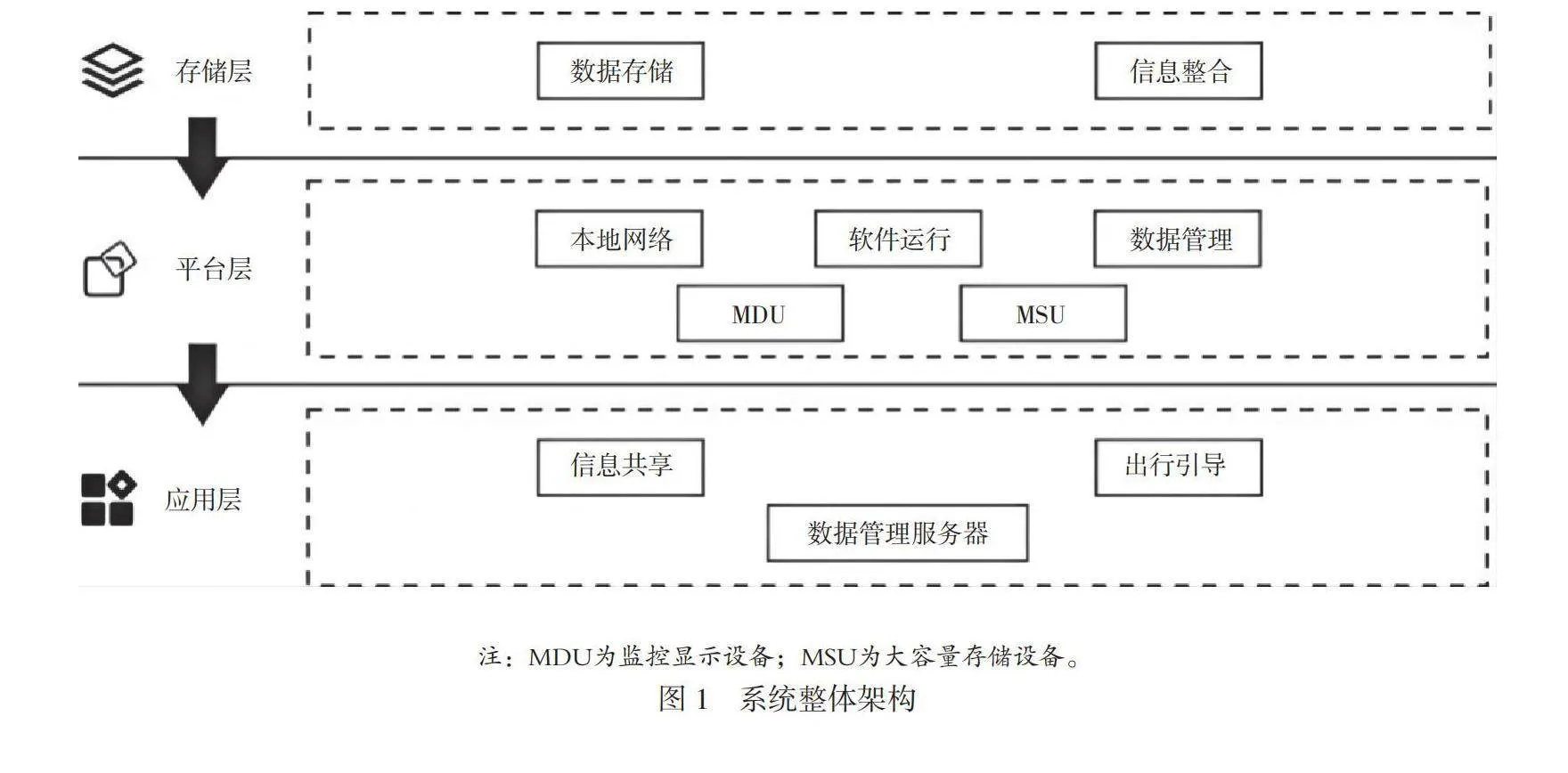
系统整体架构如图1所示。系统整体框架包括存储层、平台层以及应用层。本文根据分层理念,创建智能交通数据资源池,进行实况录音、录像的传输与存储、数据管理并监控统一调度,系统整体结构如图1所示。存储层可存储云计算模型提供的交通数据,控制系统接入设备,同时整合所有交通信息,通过平台层与应用层进行交互;平台层采用分布式计算,由MDU、MSU设备构成,将监控系统部署到服务器终端,通过业务单元管理服务器,使城市交通信息与服务器交互,同时记录所有交通数据,实现了本地网络、交通软件运行与网络数据管理等功能;应用层可创建监控信息传输通道,并提供信息共享和出行引导,其终端支持不同接入方式,使监控信息进入数据管理服务器并作为系统外设完成连接,通过光纤接入进行交通数据收集与通信。
2硬件设计
2.1解码器
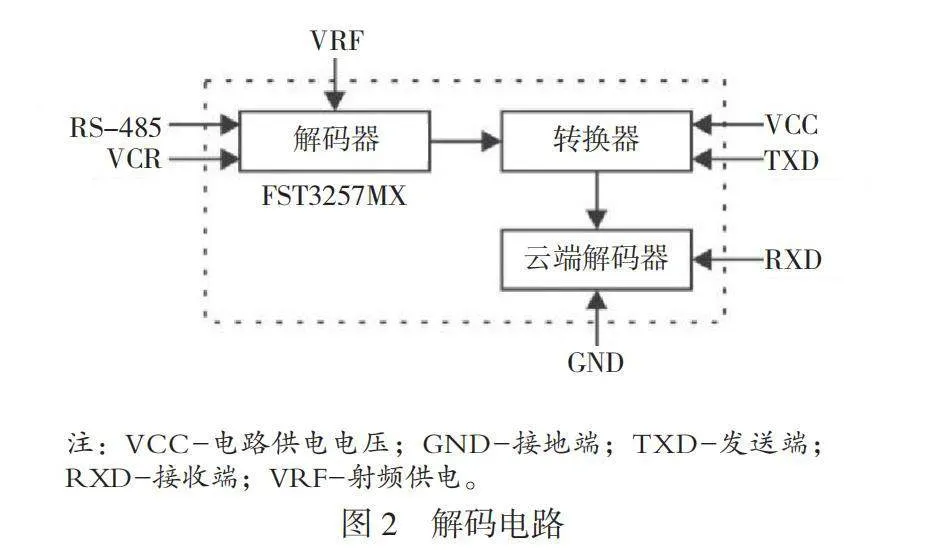
利用云计算解码器对交通视频进行译码,将其输出的控制信息转化为实际操作频率,由此对前端摄像装置进行遥控。解码电路如图2所示,该解码器(FST3257MX)的前端通过RS-485接口与VCR端的串口接口相连,通过转换器将RS-232的数据流转换为RS-485,并传送至云端解码器。云端解码器将收到的命令进行译码,并将其转化为相应的天线、视频与其他操作模式的输出信号,通过操作不同信号向解码器与摄像装置进行控制信号传输。接收到控制信号的电频后,云端解码器会执行相应信号命令。
2.2监控器
为满足交通实际需要,需要打造全程监控。该监控器由PIC18F4520与OM-K2-S30等装置构成,采用前沿视频通信技术,可进行远距离数据传送。控制芯片以PIC18F452为核心,功能是收集监控各交通子节点的参数。OM-K2-S30是主控器,功能是将各子节点信息汇聚到一起并整合数据,以此监控交通全程。监控器的工作原理如下所示。1)接收来自摄像装置或其他信号源的信号开始工作,这些信号可能是模拟信号或数字信号。2)对进入监控器的信号进行解码与转换,包括放大、滤波和去噪等。3)如果信号源是模拟信号,就在输入前由转换器转换为数字信号,便于更好地呈现图像。4)将处理后的信号发送至显示设备上,采用显示技术将其转化为可见图像,监控器上的像素矩阵根据接收到的信号来控制亮度。
3软件设计
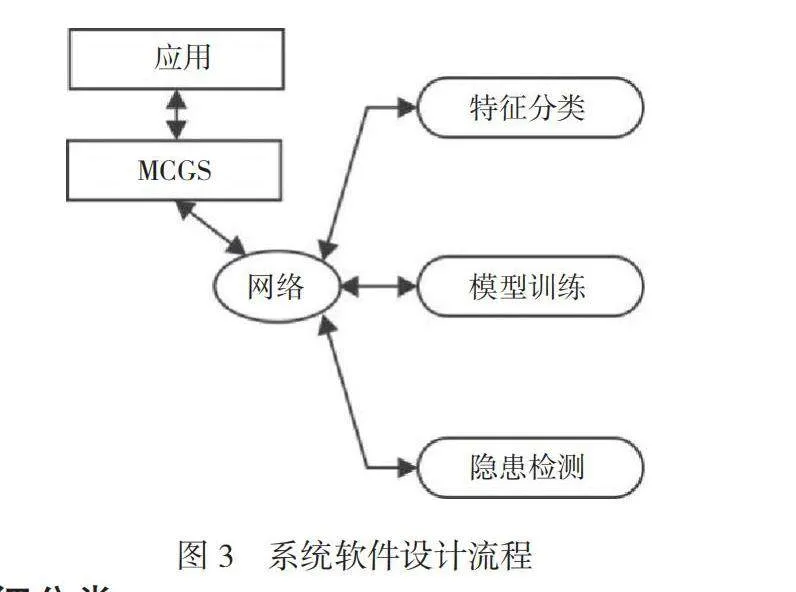
数据集成平台选用监视与控制通用系统(Monitor and Control Generated System,MCGS),由监控系统收集、存储、集成和共享网络中的各类监控信息,为交通管理部门提供完整有效的数据源,由此实现监控程序与外设间的数据交换。系统软件设计流程如图3所示。
3.1特征分类
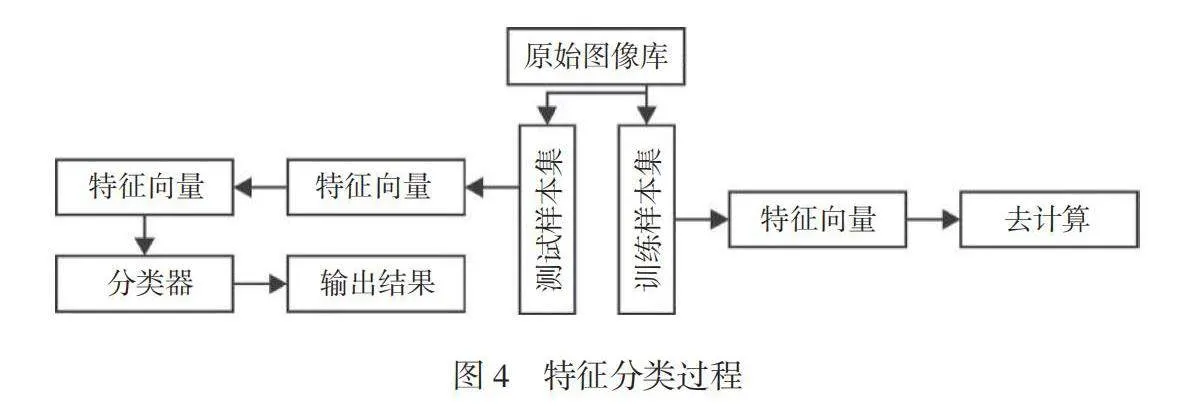
交通数据信息监测与分类过程的核心是识别的准确性与实时性。为了进行交通监控,使用云计算对交通数据信息特征进行识别分类,具体分类过程如图4所示。云计算包括2个部分,一是利用数据训练出分类器模型;二是数据测试,用以验证模型准确性。
3.2模型训练
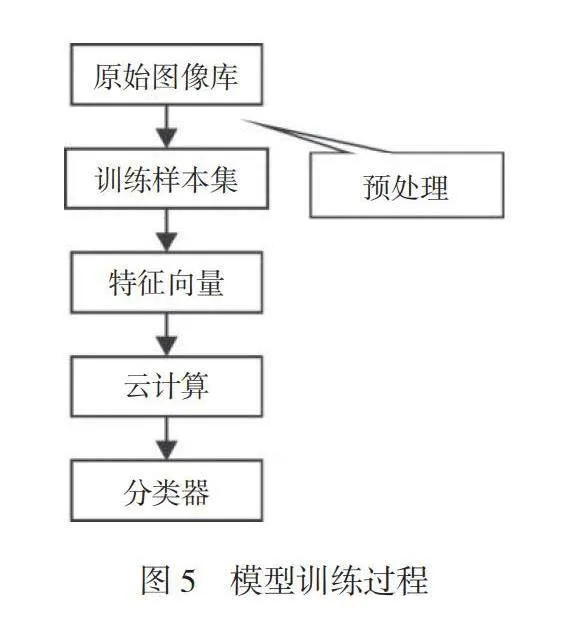
由于分类器需要以合适的图像为样本,因此需要对收集的样本进行归一处理,帧率保持在60f/s左右。根据场景差异,排除尺寸过小或无法分辨的图片,甄选出可用目标。将可用图片中的一半作为训练样本,其余为测试样本。训练样本主要用于提取特征向量,因此将车辆、人流和设施等特征合并为一个多维特征向量,并将其作为对分类器进行模型训练的输入数据。利用分类器进行特征向量训练,最终得到一个全新分类器,训练最大迭代次数为 200 次,具体训练流程如图 5 所示。
3.3隐患检测
通过上述流程得到分类器后便可进行图像检测。提取待检测图像的特征向量,将其输入已训练好的分类器中,由此可判断待检测序列是否存在交通隐患。如视频中某路况存在隐患,便可在原图像中标出区域,如果没有隐患,就不做处理。
4监控过程
4.1车流量
在软件设计的基础上读取存储层交通数据,识别异常车辆信息,从而设计监控流程。设定交通数据范围,例如设通行能力为x,修正系数为k1,根据交通车流量取值,数据收集间隔为a,则交通数据的车流量范围r如公式(1)所示。
0≤r≤(1)
4.2速度
将r作为交通数据流的收集上限,根据特定周期进行数据收集,同时挖掘高峰阶段的交通数据,初始化数据收集的起止时间,识别高峰阶段收集间隔,并在查询归档后完成数据维护工作。因为高峰阶段交通数据流较多且显著高于通信水平,所以有必要进行速度识别。设限速为sl,修正系数为k2,则交通数据的速度范围s如公式(2)所示。
0≤s≤k2·sl(2)
4.3占有率
交通数据的车辆占有率取决于检测时间与收集间隔的比值,合理范围保持在100%以内。将车流量作为参数值,设收集时间为t,修正系数为k3,交通数据的车流量范围为r,则交通数据的车辆占有率e如公式(3)所示。
(3)
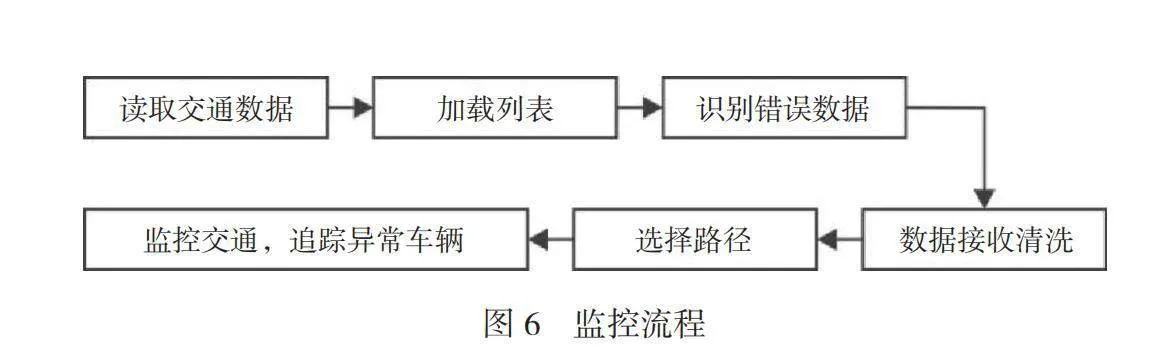
将车流量、速度和占有率作为基本参数代表参数内容,筛选交通数据流的限值,将限值的计算结果作为允许误差大小,使交通数据流呈正态分布,对处于不合理范围的数据进行标记,由此识别错误数据,即监控过程中的异常车辆。具体流程如图6所示。
5系统试验
试验运行在Windows11系统上,CPU型号为Intel I913900K,GPU型号为DUAL-RTX4070-12G,仿真平台选用ErgoSIM交通仿真平台,其中GPU包括3283个流处理器。为了更好地比较本文系统与传统系统的整体性能,重点测试监控系统的画质、准确率与稳定性。
5.1画质
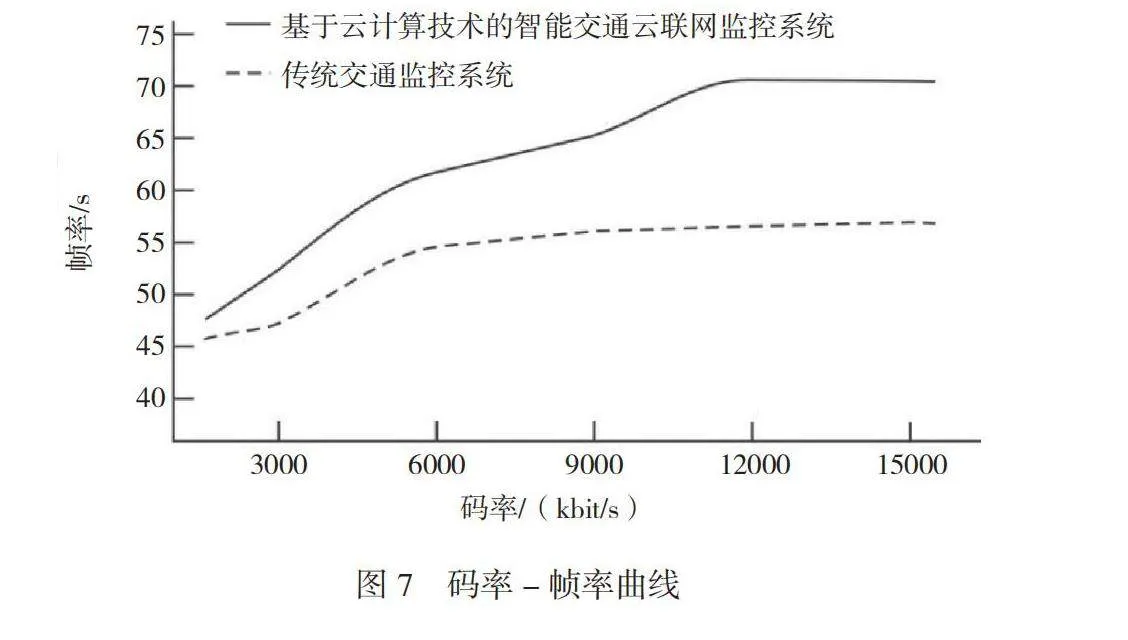
选取帧数最多的测试序列,分别使用本文系统与传统系统进行编码,并选取典型QP值(量化参数)进行测试,得到由低至高各自对应的码率与帧率值。根据率失帧理论获取所有码率坐标,构建码率-帧率曲线,如图7所示。由试验可知,本文系统的帧数整体上优于传统系统,当码率为12000kbit/s时,二者差距最大,表明本文系统编码质量显著高于传统系统,失帧更小,画质也更好。
5.2准确率
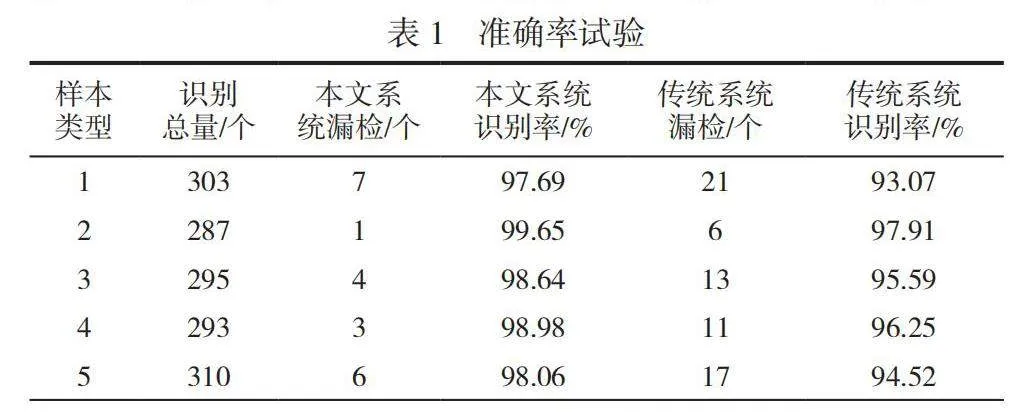
为验证系统识别准确性,与传统系统进行比较试验。在ErgoSIM平台上构建双向车道,将车道线标注清楚,并对通行与行驶情况进行高度模拟,使其贴合真实道路情况。试验时使车辆按照指令频繁通过2个系统的监控区域,并在某时间段进行分析,所得结果见表1。由试验可知,本文系统的车牌识别准确率均值为98.60%,漏检数量均值为4.2个;传统系统的车牌识别准确率均值为76.85%,漏检数量均值为13.6个。与传统系统相比,本文系统识别率约提高21.25%,漏检数量约减少约9.4个。由此可见,本文系统不仅提高了车牌识别准确率,还在一定程度上解决了车辆漏检问题。
5.3稳定性
记录系统在长期运行过程中的状态,将直播视频流输出设置为分辨率1080ppi,帧率为30f/s,码率为8000kbit/s, 得到系统平均延迟与丢包率情况,见表2。根据试验可知,与传统系统相比,本文系统能够持续正常工作,没有出现因延迟而丢包的问题。试验24h后,本文系统的平均延迟仍然保持在较低水平,表明系统可满足长期稳定的监控需求。
6结语
综上所述,目前交通监控系统设计多以牺牲画质换取低延迟,或以高延迟换取高画质。本文系统充分发挥了云计算高效处理交通数据的优势,成功实现了实时交通监控。经试验验证,本文系统运行稳定性较强,在高画质的基础上也能保证延迟较低,同时具有较高的识别准确率,能够为管理者提供有效的监控画面。在后续研究中,应逐步提高数据挖掘水平,以此促进智慧交通建设的可持续发展。
参考文献
[1]蒋建金. 一种采用容器技术基于通用硬件的云计算轨道交通信号控制系统安全平台[J]. 科学技术创新,2023(26):214-218.
[2]屠康,马倩芳. 基于深度学习的交通事件检测系统设计[J]. 无线互联科技,2024,21(3):63-65.
[3]王茁,侯洪凤. 基于图像处理技术的道路监控系统设计[J]. 大连交通大学学报,2022,43(6):19-24.
猜你喜欢
中国交通信息化(2017年9期)2017-06-06 07:14:57
电脑知识与技术(2016年21期)2016-10-18 23:34:52
电脑知识与技术(2016年21期)2016-10-18 23:24:44
电脑知识与技术(2016年21期)2016-10-18 22:11:15
大学教育(2016年9期)2016-10-09 08:54:03
科技视界(2016年20期)2016-09-29 13:34:06
中国交通信息化(2016年4期)2016-06-06 03:49:40
数学教学通讯·初中版(2015年5期)2015-06-17 15:33:29
中国交通信息化(2014年6期)2014-06-05 03:12:07
电视技术(2014年19期)2014-03-11 15:38:21
