
基于动态规划的多机电传动系统负荷平衡控制方法
2024-12-04 00:00:00张小红翟正兴
中国新技术新产品 2024年10期
关键词:动态规划



摘 要:多机电传动系统广泛应用于工业和交通设备中。负荷分布不合理和失衡会导致机组过载和转速突变等问题,对多机电传动系统的正常运行产生不利影响。因此,本文设计了基于动态规划的多机电传动系统负荷平衡控制方法。分析多机电传动系统的动力学特性,确定电动机之间的相互作用,设计针对性的负荷平衡控制器。该方法控制电机转速、电流和功率等变量,取得平衡,优化控制信号,提高负荷平衡控制器的稳定性和鲁棒性。仿真试验结果显示该方法能够稳定地控制多机电传动系统的负荷平衡,保证系统正常运行。
关键词:动态规划;多机电传动系统;负荷平衡控制
中图分类号:TM 726" " " 文献标志码:A
多机电传动系统由多个机组组成,机组之间的负荷不均衡会导致系统出现振荡、电压波动等问题,甚至引发系统故障。合理的负荷平衡控制能够使各机组在最佳工况下工作,避免某些机组过负荷或工作量不足,提高设备的使用效率,延长使用寿命,降低维护和损耗成本。因此,在提高多机电传动系统的稳定性和可靠性方面,负荷平衡控制的作用十分重要。
针对这类问题,研究人员设计了多种控制方法。张瑞成等[1]提出了基于模糊PID的轧机单辊传动系统负荷平衡控制方法,利用模糊PID设计负荷平衡控制器,并使用仿真工具验证控制器的有效性,保障电机安全使用。丁一等[2]提出了基于网络拓扑识别的负荷平衡控制方法,利用网络拓扑结构的优先原则,安排电机负荷,使负荷处于均衡分配的状态,有效控制负荷平衡。在负荷平衡控制方面,以上2种方法存在一定局限,影响传动系统正常运行。动态规划是一种优化算法,其可以对传动系统的能量进行优化以及控制信号[3]。本文提出了基于动态规划的多机电传动系统负荷平衡控制方法。
1 多机电传动系统负荷平衡的动态规划控制方法设计
设计多机电传动系统负荷平衡的动态规划控制方法的目的是提取动态响应特征,分析动力学特性,确定电机之间的相互作用关系,建立动态规划模型,控制负荷平衡。该方法能够提高系统的稳定性,提升效率,设计控制器,求解最佳控制信号,使多台电机负载平衡,保证多机电传动系统正常运行。利用动态规划控制方法,系统可以根据负荷变化实时分配并调整电机的功率和转速,有效避免过载和转速突变问题,提高系统的可靠性。
1.1 提取多机电传动系统动态响应特征
在传动系统中,动力源为电机与电池,对外输出转矩的主要部件为电机[4-5]。电机响应速度较快,在负荷分配与功率分配方面优势较大。电机的输出转矩需要克服自身阻力,再调节转速。电机转速如公式(1)所示。
re=rel+ref +jewe (1)
式中:re为电机的转速;rel为电机的负载转矩;ref为电机自身的阻力矩;je为电机惯量;we为曲轴输出角速度。电机负荷平衡控制以矢量控制为主,根据电压与电流的约束条件,分析传动系统的动态响应特性,如公式(2)、公式(3)所示。
U=+≤us2 (2)
(3)
式中:U为电机定子相电压;为电机负载电压;为电机定子电压矢量幅值;us2为电机定子相电压极限值;I为电机定子相电流值;为电机负载电流;为电机定子电流矢量幅值;is为电机定子相电流极限值[6]。根据电机、齿轮等组件的特性,分析多机电传动系统电压、电流极限值,确定每个电动机之间的复杂作用,对其有针对性地进行控制。
1.2 控制系统平台设计
控制系统是多机电传动系统的核心,主要作用是接收和处理驾驶员的驾驶操作指令。它将控制指令传递给各部件控制单元,按照驾驶员的意图驱动并进行作业。整机控制系统在驱动力矩控制、制动能量优化、整机能量管理、故障诊断和处理以及整机状态监测等方面发挥关键作用,控制多机电传动系统负荷。整机控制系统有效运作保证装载机稳定、高效运行,提高整机的性能和可靠性。
1.2.1 整机控制系统架构
本文采用一套试验样机控制系统,该系统由基于数字空间(dSPACE) 的快速控制原型系统和VCU_Link信号转换模块组成。dSPACE为整机控制核心,利用CAN总线与电机控制器、超级电容组控制单元以及VCU_Link信号转换模块传递信号。VCU_Link为信号转换模块,在整机控制系统中的作用为接收和发送开关量和模拟量的控制信号,并将其转化为CAN信号,以便与dSPACE进行CAN通信。
1.2.2 快速控制原型
利用dSPACE快速控制原型系统的控制系统开发工作包括以下3个步骤。1)根据被控对象的特性建立理论模型。2)在MATLAB/Simulink中创建控制器的预研模型,并使用图形化语言将理论模型用图形化表示。在离线环境下对控制器模型进行测试,以验证其合理性和性能。为了实现控制器模型与外部硬件的信号交互,需要在控制器模型中嵌入 I/O接口模块。3)对控制器模型进行编译,生成实时代码。在ControlDesk NG平台中创建工程试验文件,将编译生成的代码下载至dSPACE硬件系统中,运行控制程序,实时在线观测信号并记录数据。根据需要,对控制模型进行修改并反复进行测试、标定,直至满足项目需求,完成基于快速控制原型系统的控制系统开发工作。控制原型系统开发流程如图1所示。
为满足试验样机的使用需求,本文选择MicroAutoBoxⅡ系列的快速控制原型系统作为整机控制核心部分,系统型号与相应参数见表1。
为进行有效的人机交互,软件环境配置至关重要。须搭建RTI接口模型,设置ControlDesk NG实时测试环境等。这些步骤的目的是保证软件环境完整运行,在控制系统开发过程中,保证实时测试顺利进行。
1.3 基于动态规划设计多机电传动系统负荷平衡控制器
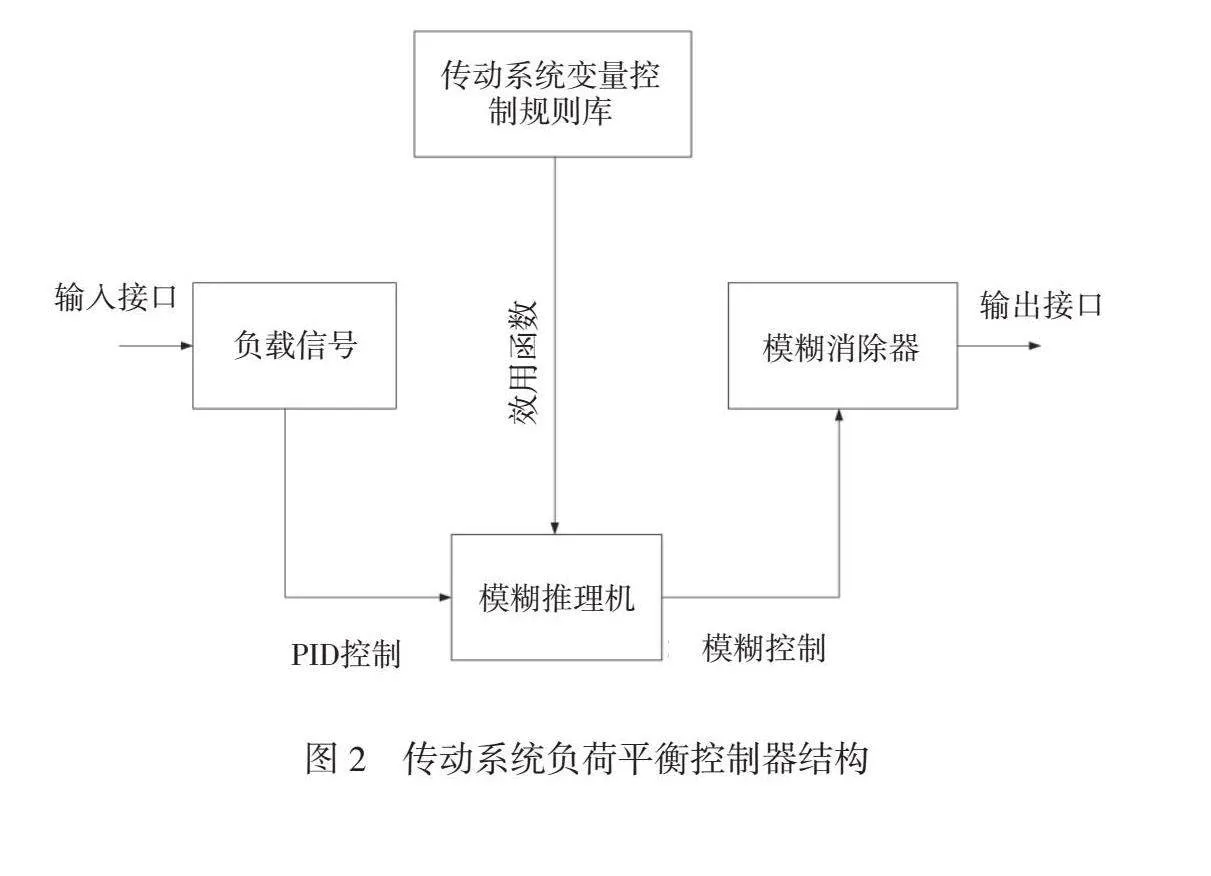
在多机电传动系统中,负荷平衡控制的目的是合理分配和调节各个电机的负荷。控制负载信号,建立状态转移方程。使用逆向递推方式,求解负荷平衡控制器的最佳控制信号,确定多机电传动系统当前状态与最佳控制序列,优化负荷平衡控制器的稳定性与鲁棒性。传动系统负荷平衡控制器结构如图2所示。
负荷平衡控制器的核心部分包括输入/输出接口、中央处理器、存储器和通信接口等[7]。控制器接收并重新分配来自各电机的负载信号,向电机发送控制指令,控制负荷平衡。根据U、I的变化情况,建立状态转移方程,如公式(4)所示。
x(t+1)=f(x(t),U(t),I(t)) (4)
式中:x(t+1)为传动系统状态转移方程表达式;x为负载信号;t为时刻;f为效用函数;x(t)为t时刻传统系统负载状态;U(t)为t时刻传动系统控制输入电压;I(t)为t时刻传动系统控制输入电流。为了使负载平衡控制器的代价最小,根据动态规划的最优控制理论,得到最佳代价函数,如公式(5)所示。
(5)
式中:J(x)为最佳代价函数;H为最优控制律。当多机电传动系统负荷符合公式(5)时,负荷平衡控制器的代价最小,x(t)、U(t)和I(t)均处于平衡状态,保证传动系统稳定地运行。
2 仿真试验
为了验证本文设计的基于动态规划的多机电传动系统负荷平衡控制方法是否满足多机电传动系统负荷平衡控制的稳定性需求,本文搭建了一个仿真实验平台,对上述方法进行了仿真分析。将文献[1]基于模糊PID轧机单辊传动系统负荷平衡控制方法、文献[2]基于网络拓扑识别的负荷平衡控制方法和本文设计的基于动态规划的多机电传动系统负荷平衡控制方法进行对比。试验过程以及试验结果如下。
2.1 试验过程
试验采用MATLAB仿真软件,对多机电传动系统进行仿真、验算和数据分析等操作,保证试验结果真实、有效。多机电传动系统负荷平衡控制仿真模型如图3所示。
当多机电传动系统同向回转时,采集不同电机的转速、电流和功率等数据,将阶跃输入调整为45 Hz。在启动初期,电机偏心转子的相位差并未达到稳定状态,传动系统不符合稳定运行的条件。运行30 min后,偏心转子的相位差达到了稳定状态,传动系统稳定运行。稳定后的电机同步转速为550 r/min~650 r/min,调整激振器偏心块的夹角为60°,电源输入频率为35 Hz,多个质量矩不同的电机同时运行,分析不同电机的负荷平衡控制效果。
2.2 试验结果
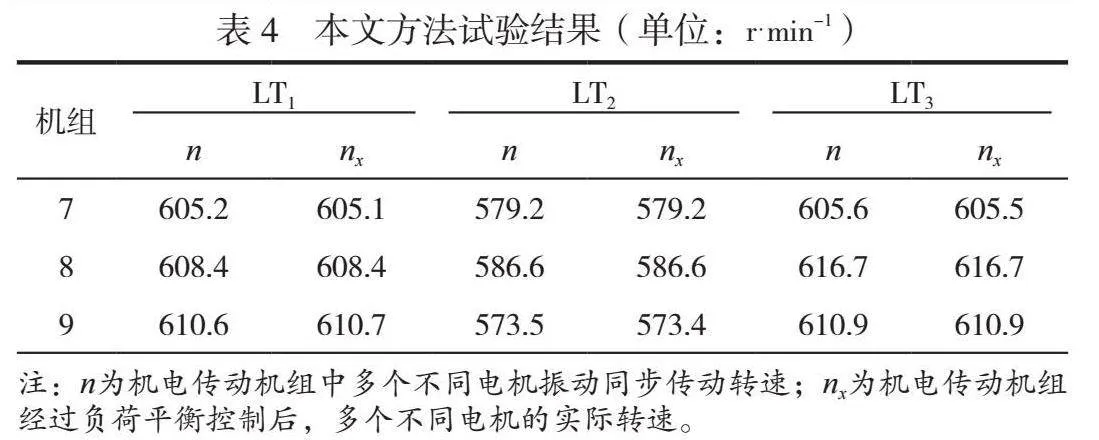
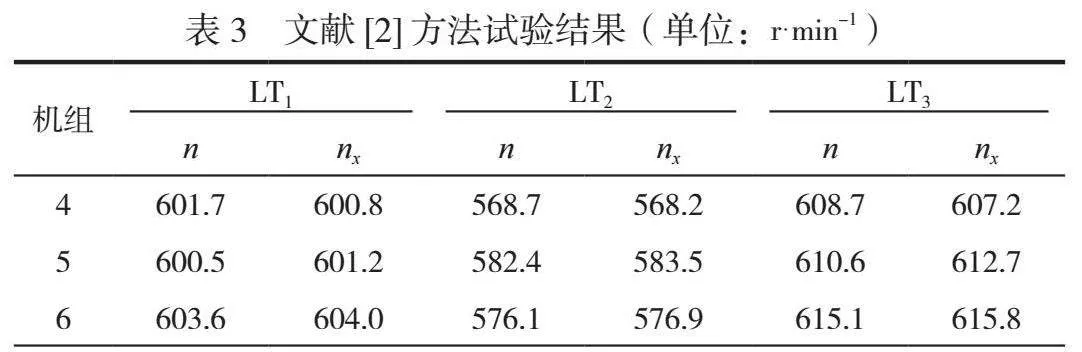
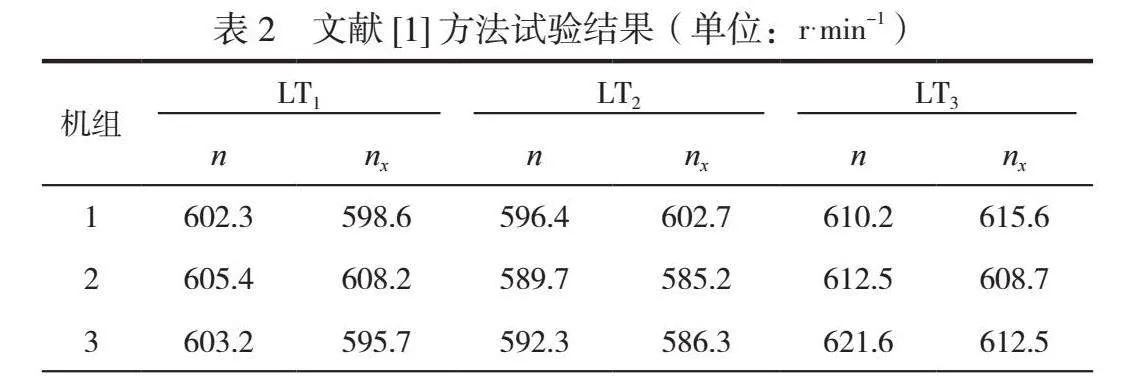
在上述试验条件下,本文分析LT1、LT2和LT3等多机电传动机组,1~9分别为不同机组的3个电机。分析电机转速变化,确定多机电传动系统负荷平衡控制的稳定性。对比文献[1]方法、文献[2]方法和本文方法的稳定性,试验结果见表2~表4。
本文根据nx确定在负荷平衡作用下的电机是否存在异常振动、转速冲击等问题,进而分析不同方法的负荷平衡控制的稳定性表现。在机电传动系统负荷平衡的状态下,n与nx的差值控制在±1.0 r/min,两者差值越大,负荷平衡控制的稳定性越弱,发生电机异常振动的可能性越高,影响传动系统的正常运行。
在其他条件均一致的情况下,使用文献[1]方法后,n与nx的差值为-10 r/min~10 r/min,两者差值较大,负荷平衡控制的稳定性不佳。使用文献[2]方法后,n与nx的差值为-2 r/min~2 r/min,与文献[1]方法相比,两者差值有所减少,仍然超过1 r/min,须对其进一步优化。使用本文方法后,n与nx的差值仅为-0.1 r/min~0.1 r/min,差值较小,负荷平衡控制的稳定性较高,能够保证传动系统正常运行。
3 结语
多机电传动系统广泛应用于各领域,在工业生产、航空航天和交通运输等方面发挥重要作用。多机电传动系统的负荷平衡控制有助于系统高效、稳定运行。负荷平衡控制有动力学特性、外界干扰不确定等问题,影响机电传动系统的正常使用。因此,本文利用动态规划,设计了多机电传动系统负荷平衡控制方法,在动态响应特征和负荷平衡控制器设计等方面进行优化,提升负荷平衡控制的稳定性,保证传动系统稳定运行。
参考文献
[1]张瑞成,赵铭.模糊PID轧机单辊传动系统负荷平衡控制的研究[J].机械设计与制造,2022(1):37-41.
[2]丁一,张磐,王旭东,等.基于网络拓扑识别的负荷平衡控制策略研究[J].南开大学学报(自然科学版),2021,54(1):95-103.
[3]白国振,王录,李炳初,等.基于三相交流异步电机定子电流信号分析的机电传动系统齿轮箱裂纹故障非侵入式诊断[J].机械强度,2022,44(5):1186-1193.
[4]韩庆珏,文韬,龚中良.机电传动控制课程教学内容思政元素研究与探索——以《机电传动系统动力学基础》为例[J].农业工程与装备,2021,48(1):46-48.
[5]王珍,项昌乐,刘辉,等.基于集中-分布参数模型的车辆机电传动系统动力学响应及影响规律[J].兵工学报,2021,42(10):2145-2158.
[6]高蕾,刘志浩,高钦和,等.多轴特种车辆传动系统机械摩擦阻力损失与传动效率研究综述[J].振动与冲击,2023,42(18):138-154.
[7]康丽霞,唐朋,唐鑫,等.高重合度直齿圆柱齿轮在直升机传动系统中的应用[J].济南大学学报(自然科学版),2023,37(5):648-654.
猜你喜欢
商情(2017年28期)2017-09-04 23:41:16
软件导刊(2017年6期)2017-07-12 20:19:12
科技创新与应用(2017年9期)2017-04-26 16:06:42
现代商贸工业(2017年2期)2017-03-28 12:52:16
商情(2016年44期)2017-03-05 00:24:15
中国科技博览(2016年19期)2016-10-19 14:20:02
中国市场(2016年33期)2016-10-18 14:23:52
计算技术与自动化(2015年4期)2016-03-25 16:50:28
大学教育(2016年1期)2016-01-19 07:08:52
知音励志·社科版(2015年8期)2015-11-24 19:33:02
