
基于Python多段摆动式抛光机仿真软件的开发与应用
2024-12-03 00:00:00隋旭东杨振恒韩文詹新平彭威
佛山陶瓷 2024年11期






摘 要:因多段抛光磨头的轨迹覆盖信息无法直接观测到,在瓷砖规模化抛光之前往往需要多次调试其抛光工艺参数,极大地降低了生产效率。为此,本文基于Python语言构建了抛光磨头的轨迹中心线和抛光效果预测模型,通过拓展软件包实现了轨迹组合、轨迹覆盖和抛光效果预测的可视化。通过与实际生产抛光参数的抛光效果进行对比,结果表明,抛光效果的预测情况和实际抛磨后瓷砖表面的光泽度分布规律一致,本仿真模型及软件为生产实际人员提供了一个参数调试工具,能有效提高实际生产转产的效率。
关键词:多段摆抛光机;仿真软件;Python;Pyside
1 引言
瓷砖的表面抛光为高耗能工序,其所花费的能耗就占总能耗的30%~40%[1]。摆动式抛光机是目前最高效的瓷砖抛光设备之一[2],通过横梁的摆动和磨头的旋转对瓷砖表面进行磨削抛光;和普通抛光机相比,多段摆抛光机摆动方式更加灵活使得摆动频率和抛光效果进一步提升,但是其抛光参数设置过于灵活,多个磨头的抛光轨迹重叠会造成抛光不均,在瓷砖表面形成明暗带,极大地降低瓷砖表面质量,提高参数调试难度。为了在规模化生产之前需要有经验的一线操作人员对抛光参数进行多次调试,导致抛光的生产流程变得繁琐还会增加额外的成本。
不少学者通过理论[3]和仿真[4]来研究抛光机的运动参数对抛光效果的影响;在研究抛光轨迹的覆盖问题时,通常使用CAXA、CAD等软件进行建模求解[5, 6];在研究抛光参数对磨削均匀性影响时,通常基于Matlab软件构建数学模型对抛磨频次[7]、当量磨削量[8, 9]和去除深度[4]等进行仿真研究。然而目前的仿真方法普遍需要自主构建模型,并使用商业软件进行建模求解,且大多仅针对特定场景。
本文将基于Python环境应用Pyside库开发一种针对多段摆抛光机的可视化用户交互式仿真界面,将抛光磨头的运动轨迹和抛光效果预测模型进行数学建模,打包封装成一个操作简单的程序软件,为工作人员提供一个结果可视化的抛光参数调试仿真软件。
2数学模型构建
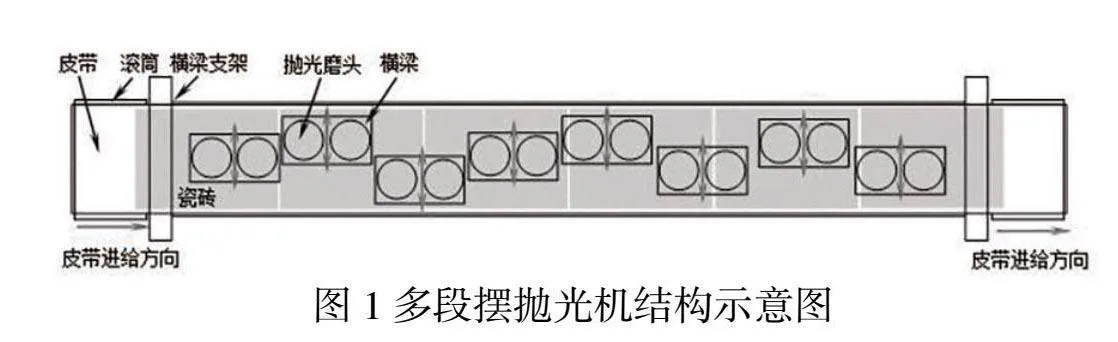
如图1所示,为目前常用的高效多段摆抛光机,单台抛光机通常有8个横梁,单个横梁上装配两个抛光磨头,横梁之间的运动相对独立,通过横梁的上下摆动带动旋转的抛光磨头对砖坯表面进行抛光,与此同时皮带带动瓷砖按照设定方向运动。
2.1单磨头轨迹中心线
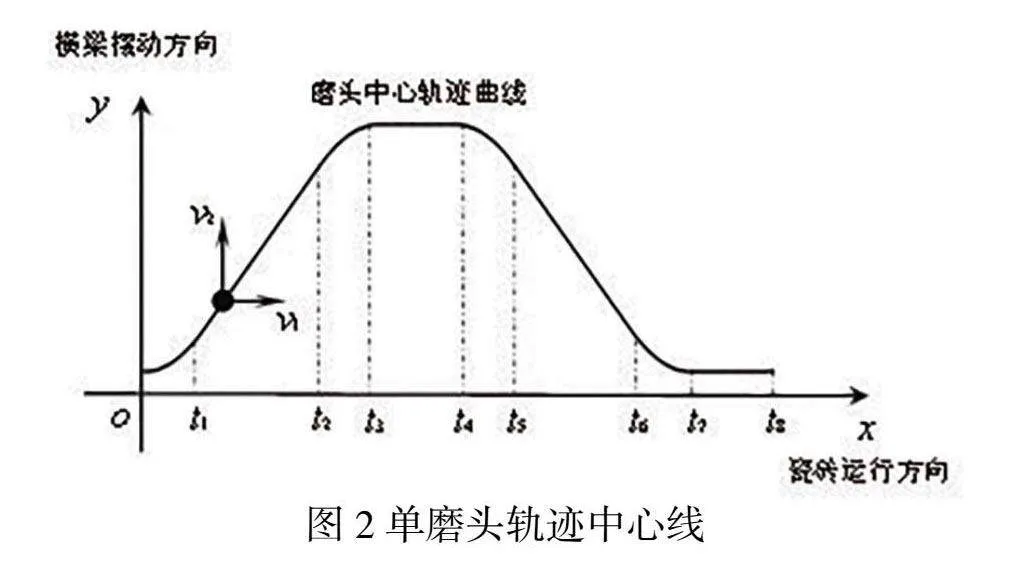
如图2所示,为单个磨头的轨迹中心线,在单个周期内横梁摆动分为八个阶段:加速-匀速-减速-停顿-加速-匀速-减速-停顿,磨头中心轨迹线由横梁的摆动和皮带进给组成,其类似于呈周期状的梯形波:
其中横梁在0~t1、t4~t5为加速阶段,在t1~t2、t5~t6为匀速阶段,在t2~t3、t6~t7为减速阶段,在t3~t4、t7~t8为停顿阶段,其在x轴方向的位移为匀速运动,在y轴上的位移为分段周期函数:
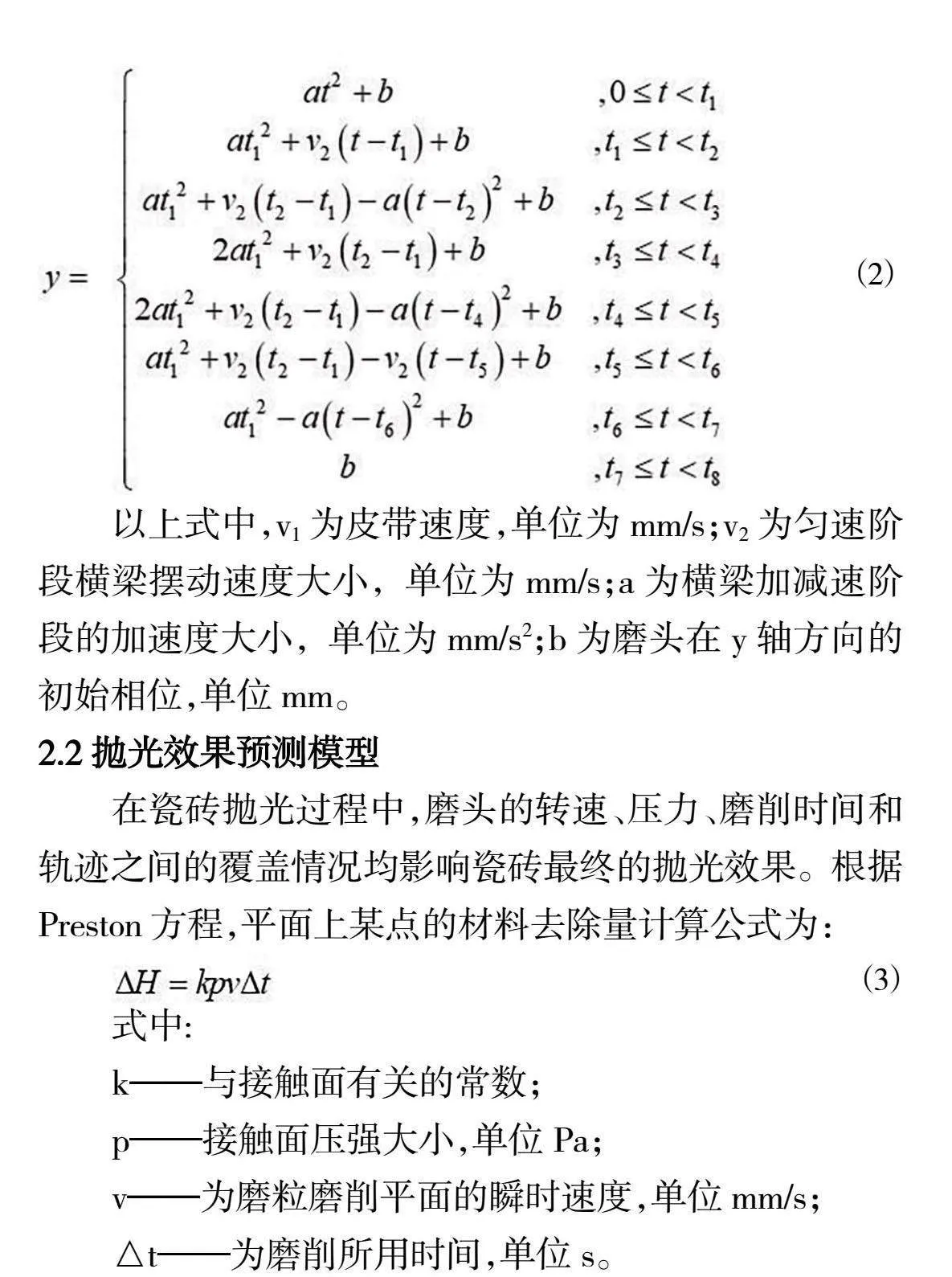
以上式中,v1为皮带速度,单位为mm/s;v2为匀速阶段横梁摆动速度大小,单位为mm/s;a为横梁加减速阶段的加速度大小,单位为mm/s2;b为磨头在y轴方向的初始相位,单位mm。
2.2抛光效果预测模型
在瓷砖抛光过程中,磨头的转速、压力、磨削时间和轨迹之间的覆盖情况均影响瓷砖最终的抛光效果。根据Preston方程,平面上某点的材料去除量计算公式为:
式中:
k——与接触面有关的常数;
p——接触面压强大小,单位Pa;
v——为磨粒磨削平面的瞬时速度,单位mm/s;
△t——为磨削所用时间,单位s。
在抛光过程中,磨头的压力是恒定不变的[10],然而单片瓷砖通常需经过多种不同粒度的磨块抛磨才能形成光洁平整的表面[6],磨块的种类繁多且不同企业使用的型号也不同,为了简化计算此处和均取1;要计算出瓷砖上各点的磨削量,需将磨块和瓷砖表面离散化为一个微小单元,通过计算瓷砖上各点被磨削时的瞬时速度,就可得出各点的磨削量分布情况。
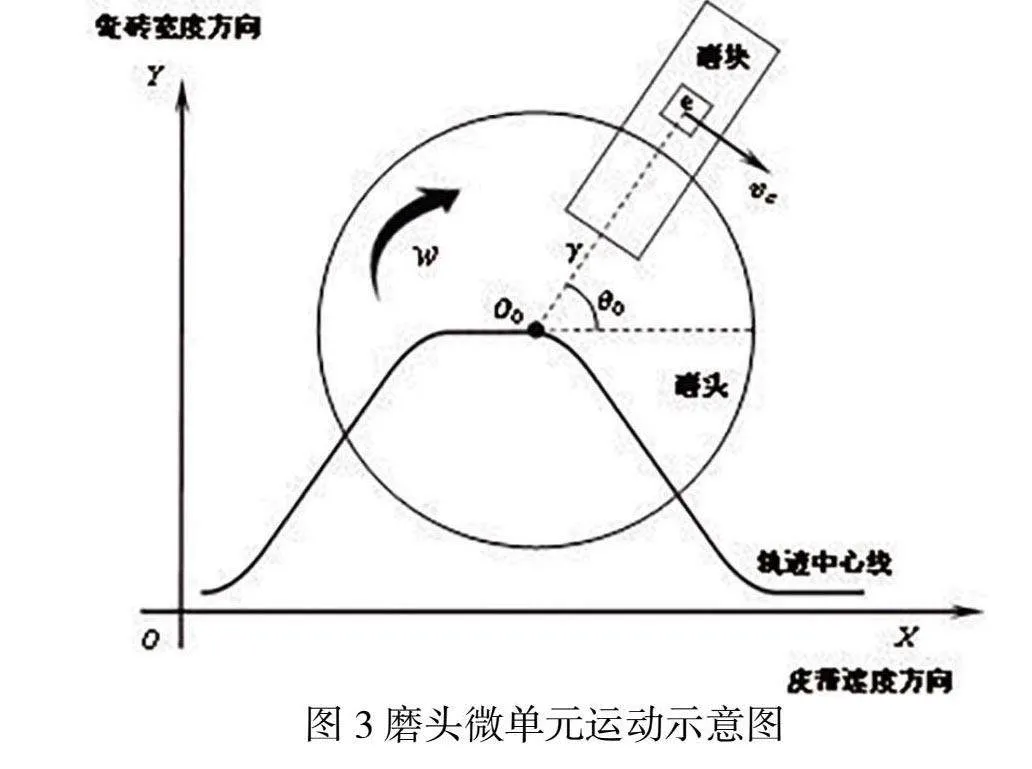
如图3,O为绝对坐标系原点,O0为磨头中心坐标(x0,y0),θ0为该时刻磨块上的磨粒e与皮带进给速度方向的夹角,θ是磨头转角为wt,γ为磨粒e的转动半径,Ce为磨粒e相对于磨头的瞬时速度,由此可以得到磨头微单元e的运动方程:
对式求导,可得对应速度方程:
总瞬时速度为:
则平面上处的磨削量计算公式:
式中
n——磨削频数;
vi——第i个磨粒在磨削点(x,y)处的瞬时速度,单位mm/s;
通过对时间t进行迭代计算,最后可以获得存储磨削量大小的二维矩阵H(x,y)。
3软件实现
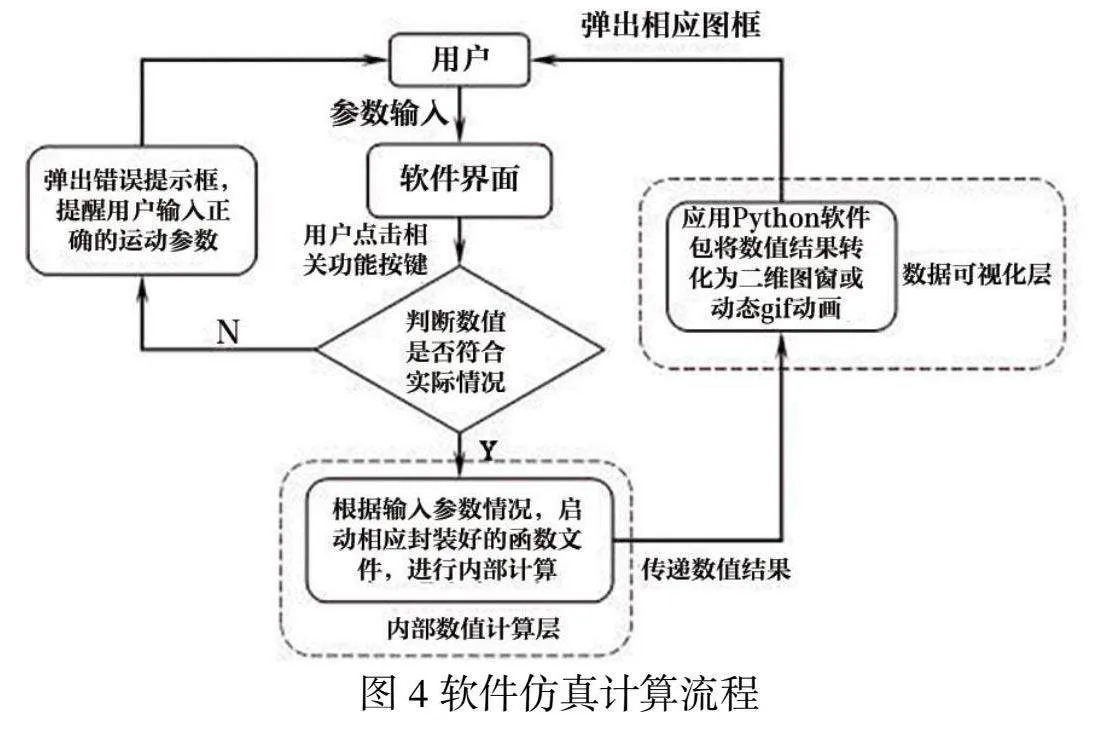
仿真软件由操作界面、底层数值计算、结果可视化展示三部分组成,计算流程如图4所示:
用户将设定的抛光参数作为输入,软件可直接输出仿真结果。若最终的可视化结果没有达到预期,用户可以重新输入相关参数进行仿真计算。
3.1软件界面
图5为软件界面主界面,主界面的布局分为三个部分,第一部分是和机型相关的尺寸参数及影响轨迹覆盖情况的抛光运动参数的输入部分;第二部分仿真结果动画播放窗口,点击相关功能按键会生成相应轨迹仿真动画,动画将自动在界面内的指定窗口播放;第三部分是不同摆动模式的功能按钮,各个功能按钮的信号和启动相应数值计算的槽函数相绑定,通过用户点击相关按钮启动系统内部的数值计算。
3.2结果可视化展示
根据实际生产中横梁同步摆动、交叉摆动、顺序摆动三种运动模式,分别从多磨头叠加后的轨迹中心线、轨迹动画覆盖情况、当量磨削量分布三种角度进行抛光效果可视化展示,辅助一线工作人员快速判断当前抛光参数是否满足要求。
3.2.1轨迹中心线和轨迹动画
轨迹中心线的计算结果分别存储单条轨迹中心线的X轴、Y轴坐标,根据机型的磨头排布和横梁的运动模式,以不同的相位对单条轨迹中心线进行叠加,最后绘制出多磨头轨迹叠加的磨头中心线,图6为对应流程:
为了区分将不同横梁上的磨头设置为不同的颜色。通过观察输出的多磨头中心轨迹的叠加情况,可以快速判断出轨迹分布是否均匀,部分区域是否会出现轨迹几乎完全重合造成过抛现象。
以磨头轨迹中心线上的点为圆心,以磨头半径为填充半径,对轨迹中心线进行填充,可以得到磨头的运行轨迹,在此基础上引入动画模块可以精准复现实际抛光加工中磨头的摆动和轨迹覆盖情况。
3.2.2抛光效果预测
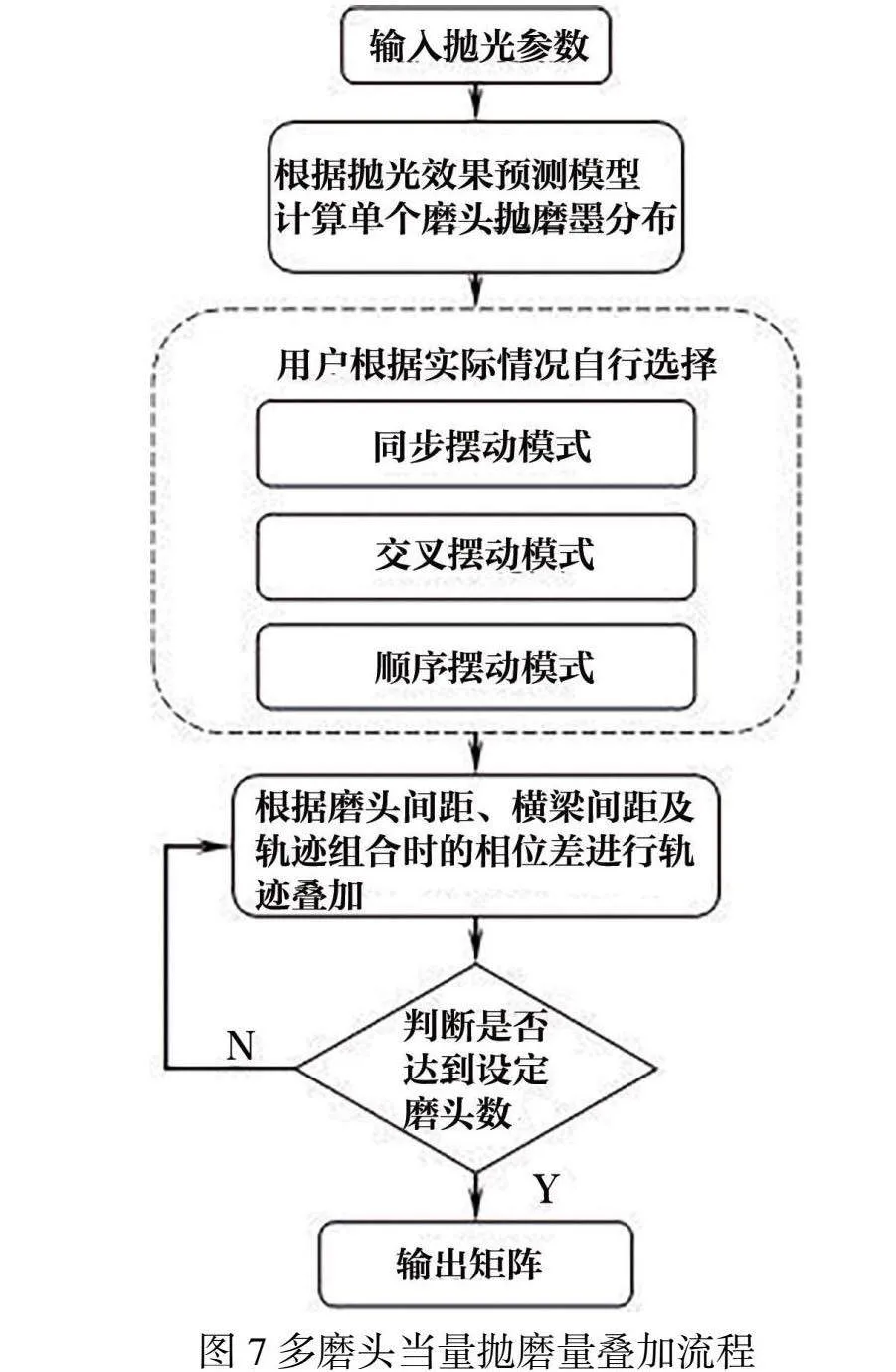
以抛光效果预测模型为基础,计算出单磨头抛磨量分布情况的矩阵H(m,n),根据多个磨头的实际运动情况进行矩阵运算进行叠加,图7为具体流程:
根据输入的矩阵绘制对应的等高线图,根据等高线的数值大小情况填充不同的颜色,设置数值从小到大填充的颜色依次为深蓝-浅绿-深红渐变色,通过颜色的分布代表瓷砖表面各点的抛磨情况。
4实例验证
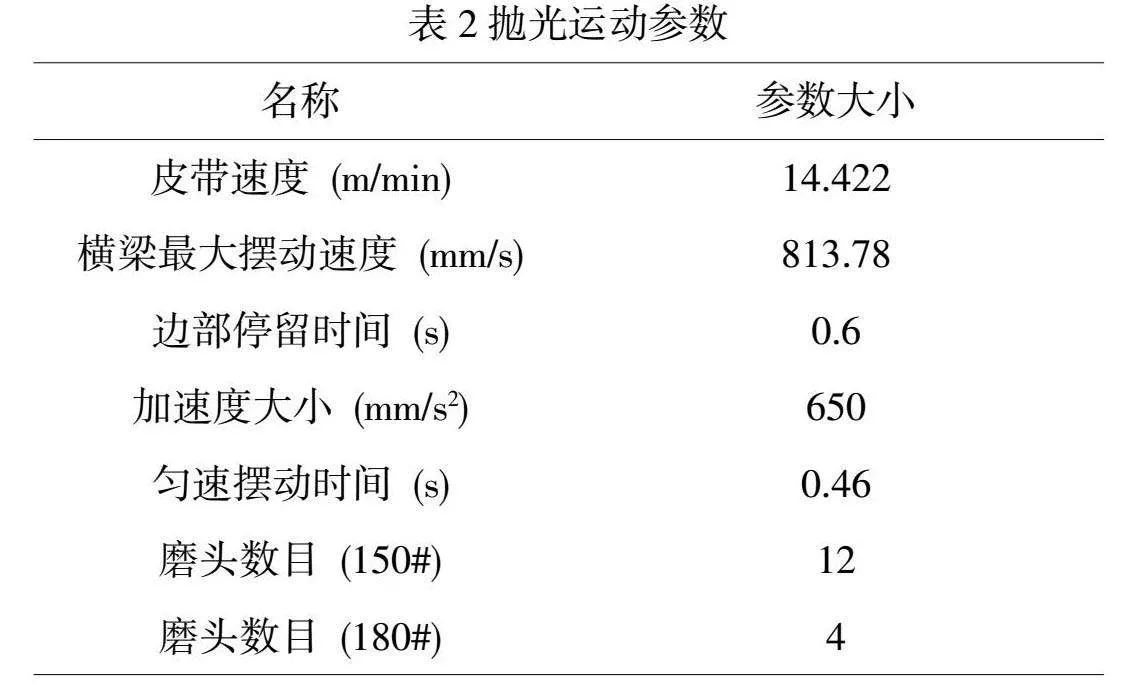
以广东某公司瓷砖生产车间现场参数作为输入,将实际抛光效果与仿真情况进行对照,和机型相关参数如表1所示,现场抛光参数如表2所示。
现场使用的摆动模式为交叉摆动,将上述参数作为输入,设定摆动方式为交叉摆动,最终输出的结果如下图所示:
图8为分别装配150#的十二个磨头和装配180#的四个磨头的轨迹中心线、轨迹覆盖情况和当量磨削量分布仿真,从中可以直观地看出磨头轨迹组合方式和抛光效果预测情况。从现场横梁的运动情况可以直接看出,轨迹的覆盖情况与图8中(a)、(b)、(c)、(d)情况相符;为了验证抛光效果预测的准确性,在抛光线上取出一经150#和180#两种磨块抛磨后的瓷砖,在瓷砖表面划定测量方格,如图9所示,测量每个方格中心的光泽度值。
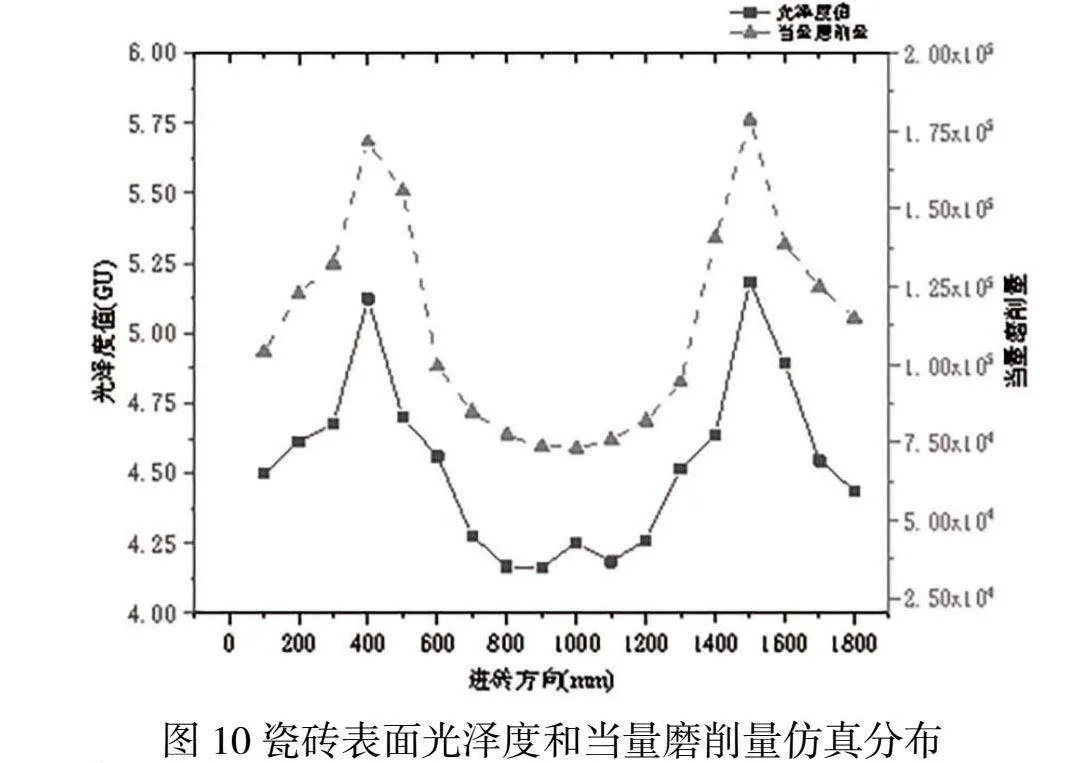
如图10所示,为瓷砖表面的光泽度值和当量磨削量仿真沿进砖方向(图9中瓷砖y轴方向)的分布情况。从中可以看出,沿着进砖方向其光泽度变化趋势为:低→高→低→高;在瓷砖抛磨中,被抛磨程度越强的区域其光泽度值在一定范围内就越高,当量磨削量代表着瓷砖表面各区域的抛磨程度,从图中可以看出,当量磨削量越大的区域其光泽度值就越高,其沿进砖方向当量磨削量的变化情况与光泽度值的变化情况相同,说明预测结果准确有效。
5结 语
本文构建了抛光磨头的轨迹中心线和当量磨削量数学模型,采用Python语言和Pyside等软件包将其封装为简单实用的仿真软件,并通过实际生产抛光验证其正确性。本软件能对多磨头轨迹的组合方式、轨迹覆盖情况进行可视化,并可对抛光效果进行预测。能为相关的一线工作人员提供一个参数调试平台,可极大地简化生产流程提升工作效率。本软件目前已在科达开发的抛光参数综合计算系统上使用。
参考文献
[1]杨海东, 郭承军, 李弘, et al. 瓷砖抛光能耗仿真建模研究 [J]. 系统仿真学报, 2016, 28(04): 765-71.
[2]徐斌, 周祖兵. 大规格陶瓷板均匀性磨削机理研究 [J]. 佛山陶瓷, 2018, 28(05): 26-30.
[3]韩文, 杨振恒, 隋旭东, et al. 单磨头瓷砖抛光工艺参数对磨削均匀性的影响 [J]. 陶瓷学报: 1-8.
[4]朱成就. 瓷砖抛光过程建模与仿真 [J]. 机电工程技术, 2015, 44(10): 61-5.
[5]周祖兵, 唐添翼, 丘兆才. 瓷质抛光机横梁摆动对抛光效率的影响 [J]. 佛山陶瓷, 2016, 26(06): 37-40.
[6]许立坤. 瓷质砖抛光生产线抛光磨削机理探讨 [J]. 佛山陶瓷, 2020, 30(11): 34-7.
[7]温革, 王振林, 向明, et al. 基于Matlab陶瓷墙地砖抛光运动模拟分析 [J]. 陶瓷学报, 2004, (04): 239-44.
[8]陈彩如, 谭建平. 大规格陶瓷砖抛光过程仿真与试验研究 [J]. 中国陶瓷, 2008, (02): 45-7+0.
[9]王颢, 魏昕, 尹兴, et al. 大平面板材抛光均匀性优化研究 [J]. 佛山陶瓷, 2021, 31(06): 21-6.
[10]冯浩 张柏清. 墙地砖抛光机磨削均匀性分析及建模 [J]. 陶瓷学报, 1999, (04): 220-5.
Development and Application of Python Based Multi-stage Oscillating Polishing Machine Simulation Software
SUI Xu-Dong1,YANG Zhen-Heng2,HAN Wen2,ZHAN Xin-Ping1,Peng Wei1
(1.Keda Industrial Group Co., Ltd,Foshan 528313, Guangdong, China;
2.Jingdezhen Ceramic University, Jingdezhen 333403, Jiangxi, China)
Abstract: The trajectory coverage information of multi-segment polishing heads is often not directly observable, necessitating multiple adjustments to polishing process parameters before large-scale tile polishing can proceed, significantly reducing production efficiency. To address this issue, this paper presents a model for predicting the trajectory centerlines and polishing effects of polishing heads based on Python. By extending software packages, the model enables the visualization of trajectory combinations, trajectory coverage, and polishing effect predictions. A comparison with the polishing effects observed under actual production parameters demonstrates that the predicted polishing effects align with the gloss distribution patterns on the tile surfaces after polishing. This simulation model and software provide production personnel with a parameter adjustment tool, effectively enhancing the efficiency of production transitions.
Keywords: Multi-stage pendulum polishing machine;Simulation software;Python;Pyside
