
中心级多目标测量数据融合的设计与实现
2024-11-30 00:00:00吴力华胡爽曹锐
现代电子技术 2024年23期











摘" 要: 为切实提升组网测控系统的实际效能,文中从方案设计和实际运用两个方面对中心级多目标测量数据融合进行了研究。首先,搭建了模块化的融合策略框架,并对各模块主要技术原理和实现方法进行了分析;其次,根据测量数据的来源设置了不同的编组序列,制定了相应的数据关联逻辑;然后,根据测量设备的性能特点设置测量数据的优先级,采用多种融合算法生成精确可靠的目标轨迹,并具备设置数据率向外发送引导数据的功能;最后,搭建了中心级多目标测量数据融合软件平台,模拟构建了典型复杂导空态势下的组网测控场景,对软件平台的功能进行了验证。仿真实验结果表明,根据技术方案系统搭建的软件平台能满足组网测控系统的多目标数据融合需求,且具备较强的迭代更新、性能扩展等能力。
关键词: 中心级; 多目标; 组网测控; 数据处理; 融合策略; 模块化设计; 工程化实现
中图分类号: TN919⁃34; E919" " " " " " " " " " "文献标识码: A" " " " " " " " " " " 文章编号: 1004⁃373X(2024)23⁃0131⁃07
Design and implementation of center⁃level multi⁃objective measured data fusion
WU Lihua, HU Shuang, CAO Rui
(Northwest Institute of Nuclear Technology, Xi’an 710000, China)
Abstract: The center⁃level multi⁃objective measured data fusion is studied in the two aspects of scheme design and practical application to improve the actual efficiency of networking TTamp;C (telemetry, tracking and control) effectively. A modular convergence strategy framework is built and the main technical principles and implementation methods of each module are analyzed. According to the source of the measured data, different grouping sequences are set up, and the corresponding data association logic is formulated. And then, the priority of the measured data is set according to the performance characteristics of the measurement equipment. A variety of fusion algorithms are adopted to generate accurate and reliable object trajectories, and the function of setting the data rate to send the guidance data outward is provided. Finally, a central⁃level multi⁃objective measured data fusion software platform is built. The networking TTamp;C scenario under typical complex air guidance situation is simulated, and the functions of the software platform are verified. The results of simulation experiment show that the software platform built according to the technical scheme system can meet with the multi⁃objective data fusion requirements of the networking TTamp;C system, and has strong capabilities of iterative update and performance expansion.
Keywords: center⁃level; multi⁃objective; networking TTamp;C; data processing; fusion strategy; modular design; engineering implementation
0" 引" 言
随着联合作战、体系对抗理念的深入,多目标、多传感器等复杂环境下的全域多维度攻防对抗将成为未来战场常态,目标、传感器类型单一或同质的传统测控系统已难以满足其测试测量需求。研究人员为提高测控系统的多目标测试测量能力,一方面结合循环神经网络、注意力机制等人工智能技术,研究目标测量数据处理和轨迹融合等相关算法[1⁃3],如文献[1]提取目标多维特征,通过无锚一阶段主干网络进行多目标轨迹修正,从而提升跟踪效果,文献[2]采用transformer等注意力时序网络提取测量数据特征,完成了融合轨迹的分类,相关研究虽然方法比较新,但因数据集、平台搭建等的局限性,算法难以在工程实践中发挥作用;另一方面,根据目标特点研究组网系统的设计,但存在遥测[4⁃5]、光电[6⁃7]、航天飞行器[8⁃9]和雷达组网[10⁃11]等测控设备类型单一,且多局限于策略、方案等理论研究层面。
针对当前研究存在的算法与工程应用联系不紧密、方案设计不够全面等系统的不足,本文设计了多设备类型的中心级多目标数据融合方案并搭建了参数、算法灵活设置的软件平台,从而达到理论研究与实践运用相结合的目的。
1" 整体框架及主要流程
根据组网测控目标测量数据的特点及测试测量需求,中心级多目标测量数据融合可以分为数据预处理、航迹关联和数据融合三个模块,以及接口、存储交互、算法等相关配套技术等,整体框架如图1所示。
2" 模块功能及原理分析
2.1" 预处理模块
数据预处理主要包括数据的归一化、异常数据点的剔除、航迹数据的平滑/拟合和时间/空间配准等方面,为确保功能稳定,采用传统的经典算法完成数据的预处理工作,故在此进行简要分析。
2.1.1" 数据归一化
主要功能是从数据库中调取不同测控设备的技术参数,并按照对应的接口协议提取测量数据中的位置信息。
2.1.2" 时间配准
时间配准按照“算法选取→参数设置→轨迹生成”流程,完成异常数据点剔除和航迹数据的平滑/拟合,形成单条测量轨迹。当前主要采用稳定性较高的滑窗最小二乘法和卡尔曼滤波作为平滑算法,并保留算法迭代更新的接口。
2.1.3" 空间配准
空间配准主要功能为将各测控设备的外测数据转换为地心直角坐标系进行统一处理,并能够将各设备接收的引导数据转化为地心直角坐标系、大地坐标系或站心极坐标系,从而具备实时测量数据与引导数据比对等航迹监测功能。
2.2" 航迹关联模块设计
航迹关联模块主要根据严谨的关联逻辑选取关联算法,采用同一性识别策略完成关联轨迹的统一编组。通过设定分组编目,可以直观地监视每个目标的跟踪状态,根据实时态势变化制定应对措施。该模块的关联逻辑如图2所示。
由图2可知,关联逻辑主要包括数据的分类编组(图中灰色部分)和不同逻辑的同一性识别策略(带底纹部分)。
2.2.1" 目标分类编组
外测数据包含遥测/引导设备传输的合作目标数据和其他测控设备获取的非合作目标数据,根据这一特征,制定了一种基于测控设备的分类编组规范,按照其在目标轨迹融合中的重要性,分为编组序列1~4,每个编组序列为测量轨迹的集合,具体划分如下。
1) 合作目标数据与其他目标数据航迹关联成功的目标编组,编为编组序列1,其他目标数据包含遥测设备获取的合作目标数据和其他测控设备获取的非合作目标数据。如果遥测设备和其他设备都传回测量轨迹且关联成功,则基本可以确定跟踪目标就是任务目标。
2) 只有合作目标数据的目标编组,编为编组序列2。合作目标数据一般需要建立目标与测量设备的数据交互链路,且非合作目标数据受限于测控设备的威力和精度,故合作目标数据对目标轨迹识别的准确性相比于非合作目标数据高。且因遥测设备的作用距离通常大于其他测控设备,因此当目标由远及近时,遥测设备首先发现目标的概率较大,该测量轨迹可作为重点关注对象。
3) 非合作目标与非合作目标测量轨迹关联成功的目标编组,编为编组序列3。该序列中的航迹数据一般作为编组序列1和2的补充,弥补在实际任务中因数据交互链路未建立或中断,导致的合作目标航迹数据缺失或非连续等不足。而在任务中,多台测控设备同时发现相同目标时,也基本可以确定该目标就是任务目标。
4) 只有非合作目标数据的目标编组,编为编组序列4。该编组序列首先作为航迹数据分类后的容器,受限于测控设备的威力、精度等,其包含的测量轨迹存在较多的冗余或错误,一般作为前述三类编组序列的验证和补充。
2.2.2" 不同逻辑的同一性识别策略
根据目标分类编组规范,将航迹关联的逻辑分为三种方式:合作目标与合作目标、合作目标与非合作目标、非合作目标与非合作目标。逻辑关系如图3a)~图3c)所示。
综合图2和图3可知,将测量轨迹按照合作目标与非合作目标存储至数据库,并同步在数据库中设置编组序列1和编组序列3的存储空间,可以将轨迹关联与数据接收相分离,使得逻辑更为清晰,且有效降低了外部接收端口的数据压力;与此同时,三个不同的同一性识别策略可以并行实施,既能充分发挥测控中心的数据处理能力,也有效提升了遍历的效率,提高了关联的实时性。以分别包含[a]条合作目标测量轨迹和[b]条非合作目标的测量轨迹为例,在所有轨迹彼此之间皆无法关联,采用顺序遍历时,遍历次数[m]与[a]、[b]的关系如式(1)所示:
[m=a+b22] (1)
当并行开展时,结合式(1),三个策略的遍历次数[m1]、[m2]和[m3]如式(2)所示:
[m1=a22m2=a×bm3=b22] (2)
由式(1)和式(2)可知,[m=m1+m2+m3],则[m≥max(m1,m2,m3)],所以本文提出的同一性识别策略在关联遍历次数上要少于以往顺序遍历次数,且随着测量轨迹的增多,两者的差异增大。
综上所述,相比于工程实践中常用的顺序关联策略,本文提出的关联逻辑具有时间成本低、资源利用率高、性能稳定可靠的特点。
2.2.3" 算法及其他
1) 匹配算法
在战场测控环境中,一方面,存在较少的先验信息,导致难以有效构建机器学习的数据集用于训练分类识别模型;另一方面,为保证关联算法的实时性和稳定性,复杂度较高的依据联合概率分布[12]、贝叶斯估计[13]等也难以满足实际需求,故采用最近邻算法[14]作为轨迹关联的主要算法,完成任务目标的确定和航迹数据关联。
2) 自检功能
为确保航迹关联的准确性、稳定性和鲁棒性,设定重检周期,对已经融合的编组序列进行关联检定,及时删减冗余的、拆分异常的融合轨迹,更新编组序列,既提高了融合轨迹与目标真实航迹的表征能力,也降低了系统的计算、存储资源。
2.3" 融合处理模块及简要分析
融合处理模块的主要功能为:采用数据融合算法将同一性识别成功的相互关联的测量轨迹,按照一定的数据融合算法生成融合轨迹;根据引导分发的需求设定合适的采样率,给测控设备提供目标引导数据。
数据融合算法包含按权重优选、按权重融合、统计误差加权融合三种,系统可以在融合过程中进行灵活切换。
2.3.1" 按权重优选
根据测控设备的特点,事先设定好各测量轨迹的权重,当不同权重的测量轨迹航迹关联成功时,模块会优先选取权重更高的测量轨迹。
如果高权重测量轨迹失效,会根据权重排序自动切换为其他测量轨迹。
2.3.2" 按权重融合
根据测控设备的特点,事先设定好各测量轨迹的权重,当不同权重的测量轨迹航迹关联成功时,模块会根据权重占比进行数据融合,权重更高的测量轨迹占有更高的百分比,失效的测量轨迹占比降为0,新加入的测量轨迹会根据权重重新分配比例。
2.3.3" 统计误差加权融合
缓存一定数量的测量轨迹,分别计算出对应的标准差,根据所有缓存数据的标准差的实时变化动态确定融合权值,标准差数值越小,说明该测量轨迹的平滑度越高,数据质量越好,融合时占比也就越高。
3" 工程化实现及仿真验证
3.1" 工程化实现
根据图1的流程策略,以B/S架构搭建了软件平台,采用UDP协议接收测量数据和发送引导数据,数据库存储设备参数及各阶段的处理数据。共包括目标轨迹显示控制和参数设置两个操作界面,如图4、图5所示。
3.1.1" 显示控制界面
如图4所示,显示控制界面主要为目标航迹相关信息,包括融合批号、测量设备、测量轨迹及优先级排序,引导分发数据选定及发送速率设定等。由该图可知,该界面能实时显示测量轨迹融合情况,可追溯测量轨迹的来源,且能够根据测控设备需求选择融合轨迹,并对外发送引导数据。
3.1.2" 参数设置界面
如图5所示,该界面主要包括数据预处理、同一性识别、数据融合算法选择及参数设置界面,以及引导分发的优先级设置。数据预处理包含滑窗最小二乘和卡尔曼滤波算法;同一性识别主要采用最近邻算法;数据融合包含权重优选、按权重融合、统计误差加权融合算法。
由图5可知,各类型算法及参数均能根据数据处理需求进行删减增加和迭代更新,在数据处理过程中,可以根据数据融合情况实时进行不同算法选定、算法参数修改等操作。
3.2" 仿真实验
3.2.1" 场景设置
设置5个目标的飞行航迹,软件接收了引导、光电、雷达、遥测等四类10条测量轨迹,具体情形如表1所示。
生成1条目标航迹后,分别沿坐标轴平移生成另外4条目标航迹。光电误差设置为:测距50 m,测角0.000 1 rad;雷达误差设置为:测距20 m,测角0.000 3 rad,随机设置异常值;引导和遥测误码率为0.001。
3.2.2" 多目标测量数据融合结果
1) 算法选取及参数设置
选择滑窗最小二乘法作为预处理算法,因数据率不同,为确保滑窗长度的一致性,需要对不同设备部分参数进行分别设定,具体设置如表2所示。
2) 融合结果
设定不同设备的ID,软件接收各设备测量数据并拟合成为测量轨迹,进行数据融合处理,其结果如图6所示。
由图6可知,软件能够有效形成不同目标的融合轨迹,且融合批号前两位“00、01、02、03”分别代表编组序列1~4,比对表1态势,融合数据与测量数据能准确对应,且能够根据测量数据分类编组规则生成对应的融合批号。
3.3" 性能分析
从软件数据库中导出融合数据和测量数据,通过数据比对,分析软件各模块性能。
3.3.1" 数据预处理模块性能分析
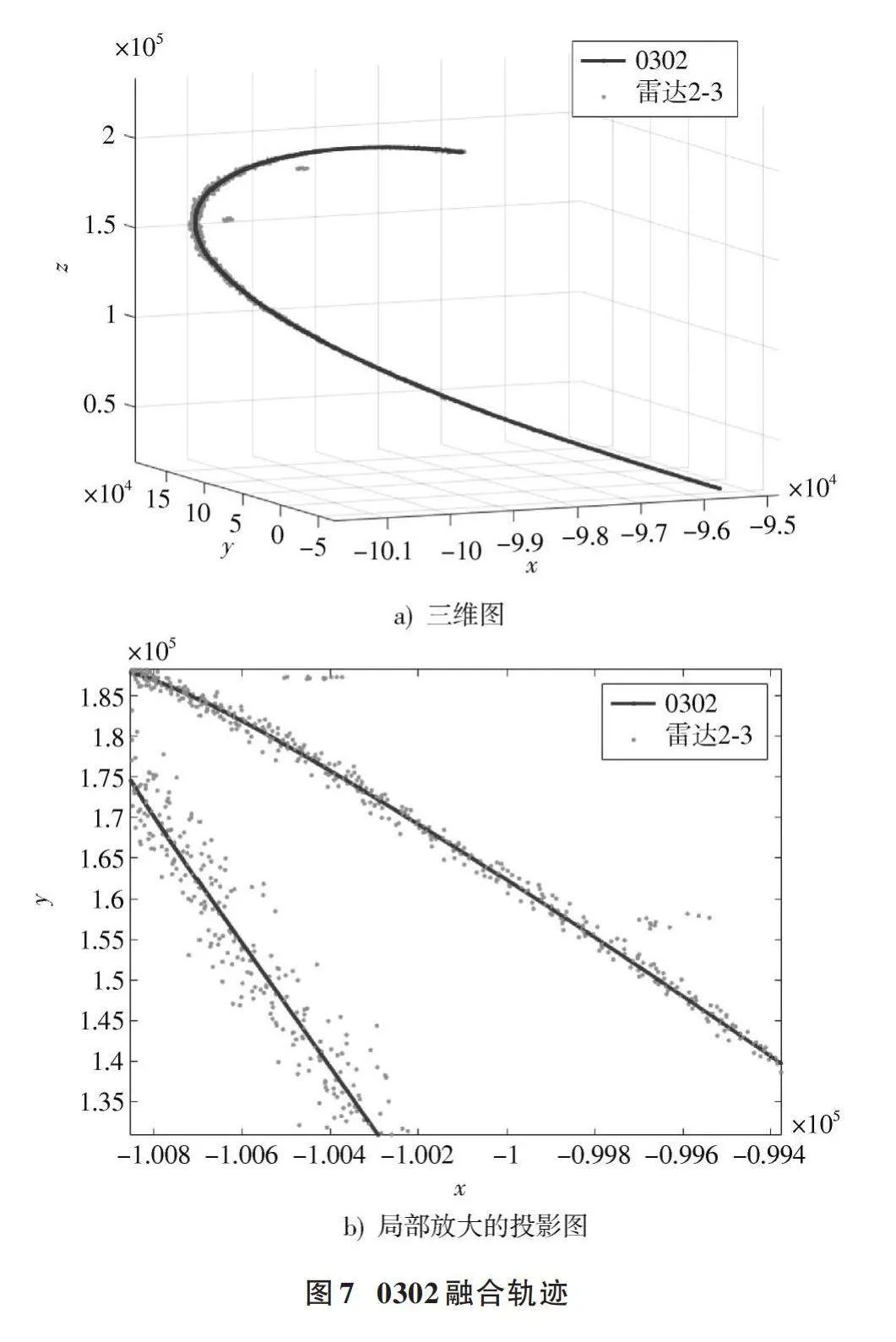
选取批号0302的融合航迹和与之对应的测量误差较大的雷达2⁃3测量数据,绘制三维图和局部放大的投影图,如图7所示。
由图7a)可知,数据预处理剔除了测量数据中的2组野值;由图7b)可知,算法能够将因误差散布的测量数据拟合成测量轨迹。
综上所述,软件的预处理模块能够剔除测量数据的异常点,并完成数据平滑。
3.3.2" 数据关联、融合模块性能分析
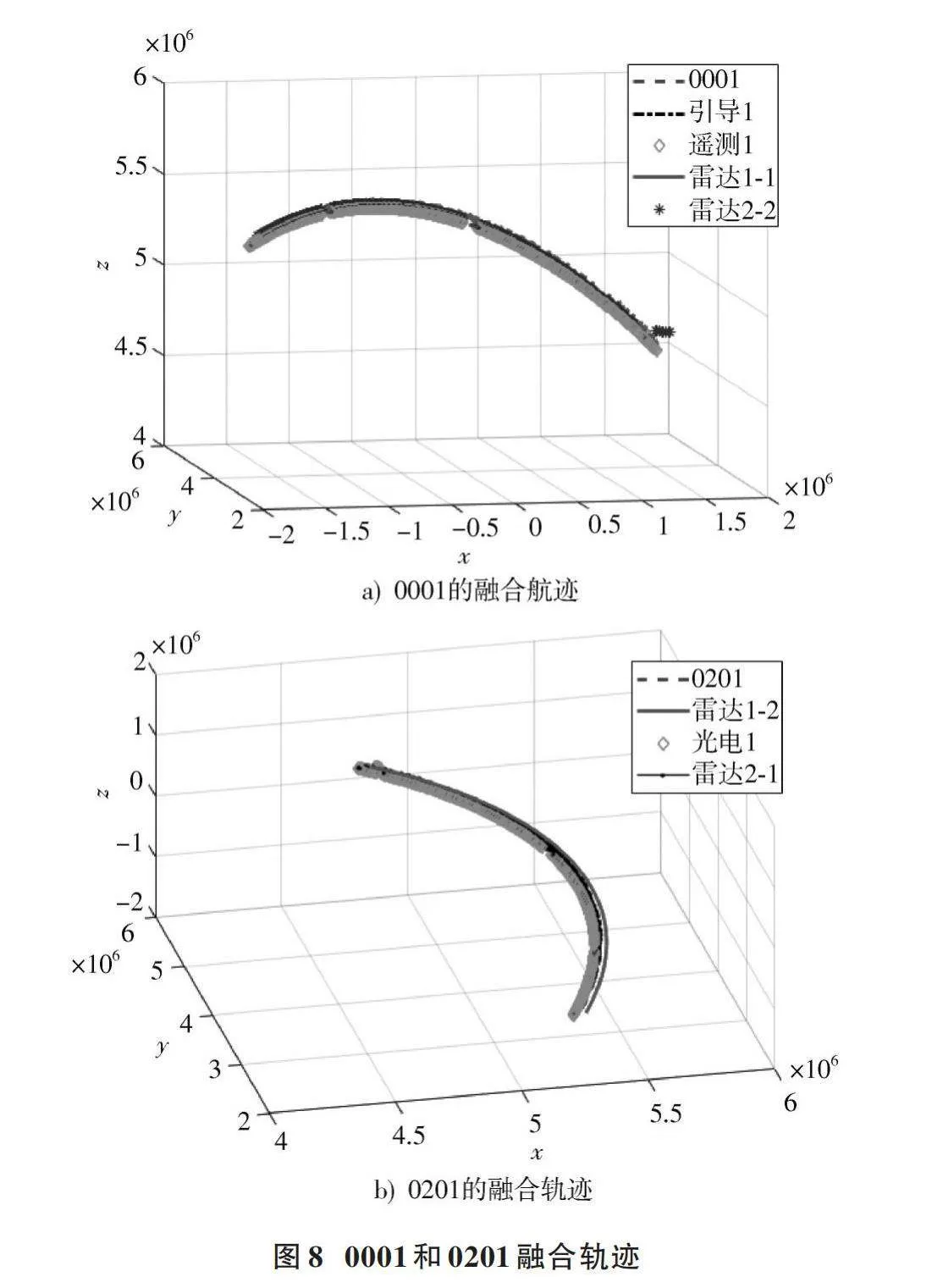
1) 分别选取批号0001的融合航迹和与之对应的引导、雷达、遥测数据,批号0201的融合轨迹和与之对应的雷达、光电数据,绘制如图8所示的三维图。
由图8可知:关联模块能够分别采用合作目标与非合作目标、非合作目标之间的同一性识别策略完成测量数据的分类编组,设置相应的融合批号;与此同时,软件能将关联的编组数据进行有效融合,特别是,从图8a)中可知,软件能够根据测量轨迹和外推数据关联融合,确保融合批号的一致性。综上所述,软件能够有效关联引导、光电、雷达、遥测的数据,且能够按照设定的编组规则,依据测量数据特点建立不同分组的稳定融合批号。
2) 选取0101和与之对应的遥测2数据,绘制三维图和局部放大的投影图,如图9所示。图9a)从整体上确认软件能够拟合测量数据,并按照分类编组规则生成融合批号,生成融合轨迹。结合表1中遥测2的数据率,图9b)表明,软件融合处理模块能够采用插值的方式,将测量数据的数据率从10 Hz提高到20 Hz。综上所述,软件能够根据算法有效融合不同的测量数据,并按分类编组规则设置融合批号,且根据局部图中融合轨迹与测量数据的稀疏程度可知,融合处理模块能够通过插值方式发送特定数据率的引导数据。
4" 结" 语
本文针对多目标测控中存在的方案设计不够系统、工程运用效果不够好的问题,设计了中心级多目标测量数据融合方案并进行了工程化实现。综合考虑测控设备性能和测量数据特点,设定测量数据优先级并进行分类编组,根据编组设计了相应的关联逻辑和融合算法。仿真验证了本文设计方案和软件平台的合理性和可行性,且具备灵活的算法扩容和迭代更新功能。
注:本文通讯作者为胡爽。
参考文献
[1] 田嘉意,李辉,李赛宇,等.基于多重信息融合与轨迹关联修正的多目标跟踪方法[J].控制与决策,2024,39(6):1888⁃1896.
[2] 夏英,陈航.融合Transformer和卷积LSTM的轨迹分类网络[J].重庆邮电大学学报(自然科学版),2024,36(1):29⁃38.
[3] PEI L, MOHAMED A. Real⁃time crash likelihood prediction using temporal attention⁃based deep learning and trajectory fusion [J]. Journal of transportation engineering, part A: systems, 2022, 148(7): 1⁃9.
[4] 刘云杰,孟景涛,田之俊,等.新一代地面站测控数传通用处理资源池设计[J].无线电通信技术,2024,50(3):541⁃547.
[5] 娄乐,柳震,齐星,等.面向遥感星座的地面测控资源调度方法[J/OL].电讯技术:1⁃7[2024⁃04⁃08].https://doi.org/10.20079/j.issn.1001⁃893x.231026003.
[6] XIA W R, MAO Y, ZHANG L Y, et al. Extended state Kalman filter⁃based model predictive control for electro⁃optical tracking systems with disturbances: Design and experimental verification [J]. Actuators, 2024, 13(3): 113.
[7] 刘可为,谢俊杰,吴冰冰,等.通感一体化光网络的技术、应用与展望[J/OL].光通信研究:1⁃15[2024⁃04⁃20].http://kns.cnki.net/kcms/detail/42.1266.TN.20240419.1435.002.html.
[8] 鞠宏浩,程楷钧,邓彩连,等.无人机空地网络研究综述[J].西南交通大学学报,2024,59(4):877⁃899.
[9] 苏继东,徐伟琳,翟盛华,等.航天器自组网技术实践与展望[J].航空学报,2024,45(5):125⁃135.
[10] GUO J J, TAO H H. Resource allocation scheme of netted radar system for target localization [J]. IET radar, sonar navigation, 2023, 17(10): 1456⁃1468.
[11] CHEN S, ZHANG H, MA J, et al. Asynchronous track⁃to⁃track association based on pseudo nearest neighbor distance for distributed networked radar system [J]. Electronics, 2023, 12(8): 1794.
[12] 付兴,徐志凯,李宏男,等.台风精细化风雨联合概率分布模型及输电线路失效概率评估[J].振动与冲击,2023,42(18):1⁃10.
[13] 严钧,陈允洁.柏拉图⁃伽马模型下尾在险价值度量的贝叶斯估计的渐近行为及其应用[J].工程数学学报,2024,41(2):365⁃376.
[14] 张晓楠,庞亚军,郎利影.基于毫米波雷达的多运动目标体征检测方法研究[J/OL].激光杂志:1⁃7[2024⁃05⁃07].http://kns.cnki.net/kcms/detail/50.1085.TN.20240506.1853.016.html.
[15] 刘敬一,彭举,唐建波,等.融合多特征的轨迹数据自适应聚类方法[J].地球信息科学学报,2023,25(7):1363⁃1377.
[16] 刘丽华,陈志豪,杨皓宇,等.面向对海监视的舰船目标跟踪与航迹融合数据集[J].中国科学数据(中英文网络版),2024,9(1):260⁃272.
[17] WANG M, LIU W F, WEN C L. A high⁃order Kalman filter method for fusion estimation of motion trajectories of multi⁃robot formation [J]. Sensors (Basel, Switzerland), 2022, 22(15): 5590.
[18] 柴蓉,崔相霖,孙瑞锦,等.基于通感融合的无人机预编码及飞行轨迹设计[J].电子与信息学报,2024,46(4):1266⁃1275.
[19] LEI H. Research on the design and control strategy of the second simulated spindle under KND CNC system [J]. International journal of frontiers in engineering technology, 2024, 6(1): 060111.
[20] CHEN H, WANG X K, SHEN L C, et al. Formation flight of fixed⁃wing UAV swarms: A group⁃based hierarchical approach [J]. Chinese journal of aeronautics, 2021, 34(2): 504⁃515.
[21] 白向龙,潘泉,马恩淳,等.基于消息传递的机载雷达组网航迹融合[J].控制理论与应用,2024,41(7):1235⁃1245.
[22] 邹玮琦,牛朝阳,刘伟,等.面向组网雷达干扰任务的多机伴随式编队航迹预规划方法[J].系统工程与电子技术,2024,46(8):2807⁃2819.
作者简介:吴力华(1987—),男,浙江金华人,硕士研究生,工程师,研究方向为智能信息处理、目标测控。
胡" 爽(2001—),男,河南正阳人,助理工程师,研究方向为智能信息处理、目标测控。
曹" 锐(1986—),男,陕西渭南人,硕士研究生,高级工程师,研究方向为智能信息处理、目标测控。
猜你喜欢
山东工业技术(2016年24期)2017-01-12 09:35:43
南水北调与水利科技(2016年5期)2016-12-27 14:34:16
时代金融(2016年29期)2016-12-05 15:29:17
求知导刊(2016年30期)2016-12-03 08:57:17
科技创新与应用(2016年31期)2016-12-03 05:23:58
科技视界(2016年25期)2016-11-25 20:56:25
商(2016年30期)2016-11-09 08:27:28
科技视界(2016年24期)2016-10-11 13:36:12
考试周刊(2016年69期)2016-09-21 16:50:00
考试周刊(2016年71期)2016-09-20 07:05:12
