
基于点云反射强度的船载激光SLAM回环检测算法
2024-11-30 00:00:00王池华陈倩胡大开何树光杨粤衡张锦昆唐欣李晓欢
现代电子技术 2024年23期





















摘" 要: 针对非结构化内河航道激光点云有效特征难以提取,导致回环检测准确率低的问题,提出一种基于反射强度扫描内容的回环检测算法。该算法首先提出了基于点云反射强度的全局描述子方法,对经过预处理后的点云进行反射强度校正,降低点云畸变影响;然后提出了基于ISC描述子的快速回环检测方法,将点云的反射强度扫描内容作为全局描述子,以增加有效特征点云;最后研究了基于帧⁃子地图匹配的回环位姿变换方法,并搭建了一套船载激光SLAM软硬件系统平台验证了上述算法的可行性。实验结果表明,文中的回环检测算法准确率提升了20%,处理时间减少了24%,说明该算法在提高检测速度的同时还提升了建图的精度。
关键词: 智能船舶; 激光点云; 反射强度; 位姿匹配; 回环检测; 全局描述子
中图分类号: TN911⁃34; U675.73" " " " " " " " " "文献标识码: A" " " " " " " " " " 文章编号: 1004⁃373X(2024)23⁃0113⁃06
Shipborne LiDAR SLAM loop detection algorithm based on point cloud reflection intensity
WANG Chihua1, 2, CHEN Qian1, 3, HU Dakai3, HE Shuguang4, YANG Yueheng3, ZHANG Jinkun3, 5, TANG Xin1, 3, LI Xiaohuan1, 3
(1. Guangxi Research Institute of Comprehensive Transportation Big Data, Nanning 530001, China;
2. Guangxi Beigang Big Data Technology Co., Ltd., Nanning 530001, China; 3. Guilin University of Electronic Technology, Guilin 541004, China;
4. Guangxi Beibu Gulf International Port Group Co., Ltd., Nanning 530001, China; 5. GUET⁃Nanning E⁃Tech Research Institute Co., Ltd., Nanning 530001, China)
Abstract: In view of the low loop detection accuracy due to the difficulties in extracting effective features of LiDAR point clouds in unstructured inland waterways, a loop detection algorithm based on reflection intensity scanning content is proposed. A global descriptor method based on point cloud reflection intensity is proposed to correct the reflection intensity of the preprocessed point cloud, so as to reduce the distortion effect of the point cloud. Then, a fast loop detection method based on ISC descriptor is proposed, which takes the reflection intensity scanning content of point cloud as the global descriptor to increase the effective featured point cloud. A method of loop pose transformation based on frame⁃submap matching is further studied. A shipborne LiDAR SLAM software and hardware system platform is built to verify the feasibility of the above algorithm. Experimental results show that the proposed algorithm improves the loop detection accuracy by 20% and reduces the processing time by 24%, which indicates that the proposed algorithm improves not only the detection speed, but also the accuracy of mapping construction.
Keywords: intelligent ship; LiDAR point cloud; reflection intensity; pose matching; loop detection; global descriptor
0" 引" 言
内河船舶作为我国水运体系的重要组成部分,扮演着货物运输、资源输送等重要角色[1]。然而,传统的船舶自动识别系统(Automatic Identification System, AIS)、全球导航卫星系统(Global Navigation Satellite System, GNSS)等存在自主定位误差大的问题,不能应用于智能船舶自动靠离泊、无人驾驶船舶等,因此急需一种适用于内河环境的高精船舶自主定位技术。激光SLAM(Simultaneous Localization and Mapping)作为一种自主定位与建图技术,可通过激光雷达获取船舶周围航行环境信息,实现船舶的自主定位与建图[2]。
然而,在内河水域中,水面会吸收大量激光点云,进而使得接收的有效点云特征变得更加稀疏,且现有的研究多是基于地面点云特征的激光SLAM算法[3⁃5],仅通过里程计计算位姿信息并生成点云地图[6],直接应用于内河船舶激光SLAM时,定位和建图精度急剧下降。文献[7]在LeGO⁃LOAM算法[8]的基础上融入IMU和GNSS差分数据,提高了地图构建的准确性,但该方法严重依赖GNSS,未考虑从激光点云的特性参数进行有效特征提取。文献[9]提出激光雷达点云和IMU数据,通过Cartographer框架进行船载多传感器融合定位,但该SLAM算法是基于单线激光雷达,只能输出二维地图,无法满足三维高精定位与建图的有效特征提取需求。文献[10]提出一种激光惯导紧耦合框架U⁃LOAM[11],使用IMU输出对点云进行运动畸变校正,提高了水面环境上的船舶自主定位精度,但其回环检测模块基于欧氏距离,未考虑累积误差对回环检测的影响。进一步,随着深度学习的迅速发展,激光SLAM中引入深度学习[12]的方法有PSF⁃LO[13]、CAE⁃LO[14]和DMLO[15]等,然而这些基于深度学习的SLAM算法普遍缺乏已标注的点云数据集,且大多用于离线建图,时效性也难以保障。进一步,回环检测使用局部点云特征进行场景识别以提高建图的精度[16]。文献[17]通过从点云中随机选择关键点并提取区域形状描述子,使用投票策略查找关键点最近邻的方法来识别场景。文献[18]将点云数据转换为距离图像,并提取每个关键点的特征描述子向量,并使用构建的Kd⁃tree高效处理高维度向量。为了提高场景识别的性能,引入了NARF局部描述子和词袋模型匹配方法[19],然而,局部描述子不足以表征整个点云的特征,全局有效特征难以获取。
为解决上述挑战,本文提出一种基于点云反射强度的船载激光SLAM回环检测算法。该算法首先基于点云反射强度的全局描述子方法,降低点云畸变影响;然后基于ISC描述子的快速回环检测方法,以增加有效特征点云;最后基于帧⁃子地图匹配的回环位姿变换方法,搭建船载激光SLAM软硬件验证系统平台以验证上述算法的有效性。
1" 算法设计
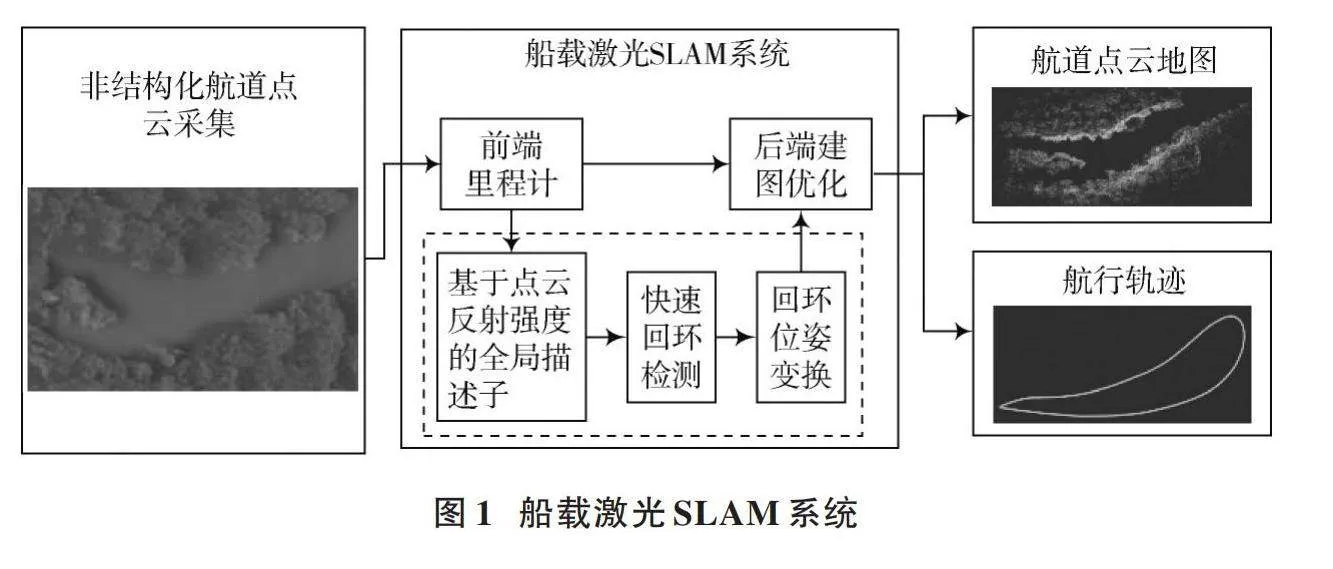
本文提出的船载激光SLAM系统如图1所示。该系统主要针对非结构化内河航道激光点云有效特征难以提取导致回环检测准确率低的问题。首先,在前端里程计模块中,输入的激光雷达点云经过无效点去除、降采样等预处理操作后,按照点云的粗糙度提取平面和边缘两类特征点,通过点到直线与点到平面的距离构建非线性残差方程,迭代求解以得到里程计位姿;然后,创新性提出了基于点云反射强度全局描述子的方法,用于提取建图的有效点云特征,并对经过预处理后的点云进行反射强度校正以提取该帧点云的反射强度扫描内容描述子,通过KNN算法快速查找与当前点云帧相似的候选关键帧,并计算当前帧与候选点云帧之间的相似程度,选择其中最相似的点云帧作为最优关键帧,实现快速回环检测;最后,设计一种改进的迭代最近邻算法求解回环位姿变换,并将该位姿约束加入到后端建图优化模块中,得到经过修正后的航行轨迹和全局航道点云地图。
1.1" 基于点云反射强度的全局描述子
激光雷达返回的点云强度值不仅受物体表面特性的影响,还会受到采集位置、仪器性能等各种因素的影响。因此,为了得到非结构航道边界物的点云反射强度值,降低点云畸变影响,本文首先对点云发射强度值进行校正。激光点云的强度值由点云接收功率和发射功率二者之间的比值确定,接收功率[Pr]及激光点云强度值[Ir]定义为:
[Pr=PeD2rμ4R2ωsysωatmcos α] (1)
[Ir=PrPe=D2rμ4R2ωsysωatmcos α=ωcomμcos αR2] (2)
式中:[Pe]为激光的发射功率;[Dr]为激光接收器的孔径大小;[μ]为激光点所在的材料反射率;[R]为激光点到接收器的距离;[ωsys]为激光束在接收系统中的传输因子;[ωatm]为激光束在空气中的传输因子;[α]为激光束在物体表面的入射角;[ωcom]为最终合并的常数因子。
从式(1)和式(2)可以看出,物体表面的反射率[μ]与距离[R]和入射角[α]有关。
[μ∝IrR2cosα] (3)
对于某时刻测量得到的激光点云帧,各个点的距离已经得到,入射角[α]可以通过分析点的法向量进行估计。对于每个激光点[p∈R3],局部表面法向量[n]表示为:
[n=(p-p1)×(p-p2)p-p1p-p2] (4)
式中:[p1]、[p2]分别为当前点[p]的两个最近邻点。
可以计算入射角[α]的余弦值为:
[cosα=pT⋅np] (5)
参考文献[20],采用校正函数[φ]对反射强度通道读数[Ir]进行校正,可得校正后的反射强度[Ical]为:
[Ical=φIr,R] (6)
对于含有[n]个激光点的点云帧,表示为[P={p1,p2,…,pk,…,pn}],每个点[pk]都有4个通道的读数,分别是三维空间坐标读数和反射强度读数,在局部笛卡尔坐标系[21]下可以表示为[pk=xk,yk,zk,ηk],将其转换成极坐标表示[Γpk=dk,θk],其中距离[dk]和方位角[θk]分别为:
[dk=x2k+y2k] (7)
[θk=arctanykxk] (8)
式中[θk]为激光与坐标轴的夹角。将极坐标按照径向和环向划分成[Nr×Ns]个子空间,每一个子空间的定义为:
[Sij=pk∈Pi⋅DmaxNr≤dklt;(i+1)⋅DmaxNr,j⋅2πNs≤θklt;(j+1)⋅2πNs] (9)
式中:[i]、[j]分别为径向和环向的索引,并且[i∈1,2,…,Nr],[j∈1,2,…,Ns];[Dmax]为设置的最远距离阈值。
由于每个子空间远小于整个点云空间,当子空间足够小时,可以认为子空间内的点云均属于同一个物体,因此返回的强度读数相近,所以使用式(10)对子空间进行编码。当[Sij⊆∅]时,[ζij=0]。至此,可以得到一帧点云的反射强度扫描内容ISC描述子[Ω]。
[ζij=κSij=meanpk∈Sijηk] (10)
[Ω(i, j)=ζij] (11)
式中:[κ⋅]表示编码函数;mean表示取平均值。
1.2" 基于ISC描述子的快速回环检测
回环检测从所有历史点云帧寻找与当前时刻点云最相似的点云作为目标回环帧,随着运动时间的增加,历史帧数据库大小迅速增加,计算量也随之剧增。为减少回环检测的运算量和计算时间,本文提出一种基于ISC描述子的快速回环检测算法。
首先,从历史帧数据库中提取回环候选帧。引入快速索引向量概念,计算方式如式(12)所示。计算历史帧ISC描述子的快速索引向量,然后构建关于快速索引向量的Kd⁃tree[22],通过KNN近邻搜索与当前帧快速索引向量相似的快速索引向量对应的历史帧作为回环候选帧。
[ε=j=1NsΩ1, j,j=1NsΩ2, j,…,j=1NsΩNr, jT] (12)
式中[Ωi, j]为ISC描述子的第[i]行、第[j]列元素。
可以看出快速索引向量[ε]为ISC矩阵各行之和组成的列向量,并且具备旋转不变性,当在同一个地点激光雷达的水平视角变化时,对应的快速索引向量不会有太大改变。
使用余弦相似度作为快速索引向量之间相似程度的度量,如式(13)所示:
[cos(ε,ε)=ε⋅εεε] (13)
然后,计算当前点云帧和回环候选帧之间的反射强度扫描内容相似度。由于在同一场景中激光雷达水平视角变化时,对应的ISC描述子发生列偏移,所以使用所有列偏移情况下的最大相似度作为两个ISC描述子的相似度。而直接使用ISC描述子计算所有列偏移量计算量过大,本文使用偏移索引向量计算最大相似度下的列偏移量。得到最佳偏移量后计算当前点云帧与多个回环候选帧之间的ISC描述子相似度,选择相似度最大且超过阈值的候选帧作为回环帧。偏移索引向量为ISC描述子各列之和组成的行向量,余弦相似度作为偏移索引向量之间相似程度的度量,表达式分别为:
[ψ=i=1NrΩi,1,i=1NrΩi,2,…,i=1NrΩi,Ns] (14)
[τ=maxk∈0,Ns-1=ψc⋅ψqkψcψqk=maxk∈0,Ns-1ψc⋅ψqk] (15)
式中:[ψc]表示回环候选帧对应的偏移索引向量;[ψqk]表示当前点云帧的偏移索引向量循环移动[k]位后的新向量;[τ]为在两个偏移索引向量最相似时当前点云帧的偏移量,称为最佳偏移。
获得最佳偏移后,当前点云帧的ISC描述子[Ωc]也进行相应的偏移得到新描述子[Ωcτ],计算回环候选帧与当前点云帧的相似度。
[φ(Ωq,Ωcτ)=1Nsi=1Nsvqi⋅vcτivqivcτi] (16)
式中:[vqi]为回环候选帧的第[i]列向量;[vcτi]为[Ωcτ]的第[i]列向量。
1.3" 基于帧⁃子地图匹配的回环位姿变换
快速回环检测算法计算出当前关键帧与回环候选帧的反射强度相似度之后,当该值超过设定的阈值时,则认为检测到了回环,之后需要进一步计算当前帧与回环帧之间的位姿变换,以提高位姿匹配的精度。由于单帧点云数据较为稀疏,直接使用帧⁃帧进行ICP匹配时误差大,因此,本文提出一种基于帧⁃子地图匹配的回环位姿变换方法。该方法将当前关键帧与前面[K]帧点云拼接成局部子地图,回环帧与其前后各[L]帧拼接成子地图,对这两个子地图使用点到面ICP算法匹配求解二者的位姿变换。对于两组点云[P={p1,p2,…,pi,…,pN}]和[Q={q1,q2,…,qj,…,qN}],待优化的目标函数为:
[F=minR,ti=1Nn(R⋅qi+t-pi)2] (17)
式中:[R]表示旋转变换;[t]表示平移变换;[n]为平面的法向量;[pi]为点[qi]经过旋转变换后在点云[P]中的最近邻点,使用Kd⁃tree进行最近邻点搜索。
接着,本文使用高斯⁃牛顿法优化求解位姿变换的过程。假设点[D]为[pi]经过变换后得到的点,点[A]、[B]、[C]为点[D]的3个近邻点,点[O]为点[D]在平面[ABC]上的投影,平面[ABC]的归一化法向量为:
[n=lAD×lAB⋅normalize] (18)
目标函数为点到平面的距离[lOD],表达式为:
[lOD=n⋅nT⋅lCD] (19)
式中[lCD=R⋅q+t-pc]。由于牛顿法中的Hessian矩阵计算复杂度高,且难以求解二次导数,所以高斯⁃牛顿法使用Jacobian矩阵的乘积去近似Hessian矩阵,能够加快计算速度的同时保留较高的精度。求取目标函数关于优化变量[t]、[R]的偏导数:
[∂lOD∂t=∂n⋅nT⋅R⋅q+t∂t=n⋅nT] (20)
[∂lOD∂R=nlimΔϕ→0nT⋅R⋅expΔϕ×q-nT⋅RqΔϕ=-n⋅nT⋅Rq×] (21)
Jacobian矩阵可以写成:
[Ji=∂lOD∂t,∂lOD∂R=n⋅nT,-n⋅nT⋅Rq×] (22)
式中[⋅×]表示从向量转换到对应的反对称矩阵。根据高斯⁃牛顿法的结论,Hessian矩阵可以表示成[Hi=JTiJi],残差项为[bi=JTi⋅f=JTi⋅Idc],从而根据式(23)求出位姿增量[Δx]。
[i=1nHiΔx=i=1nbi] (23)
2" 基于ISC描述子的快速回环检测性能分析
为验证文中提出的回环检测算法的性能,本文选用scan context算法[23]作为实验比较对象,实验选用了KITTI数据集[24]中的序列00、05、07和08四个场景来评估所提出的方法。本文测试了点云的平均计算时间,如表1所示。本文算法比scan context算法的平均计算时间减少约24%,这是因为本文算法在回环检测时引入了快速索引向量。首先计算历史帧ISC描述子的快速索引向量,然后构建关于快速索引向量的Kd⁃tree,通过KNN近邻搜索与当前帧快速索引向量相似的快速索引向量对应的历史帧作为回环候选帧,大大减少了回环候选帧筛选所需的计算量,提高了回环检测算法的时效性。
表1" 点云的平均计算时间" " " " " " " " " " ms
[算法 00序列 05序列 07序列 08序列 平均计算时间 scan context 1.026 1.106 0.992 1.127 1.06 本文算法 0.792 0.813 0.801 0.825 0.80 ]
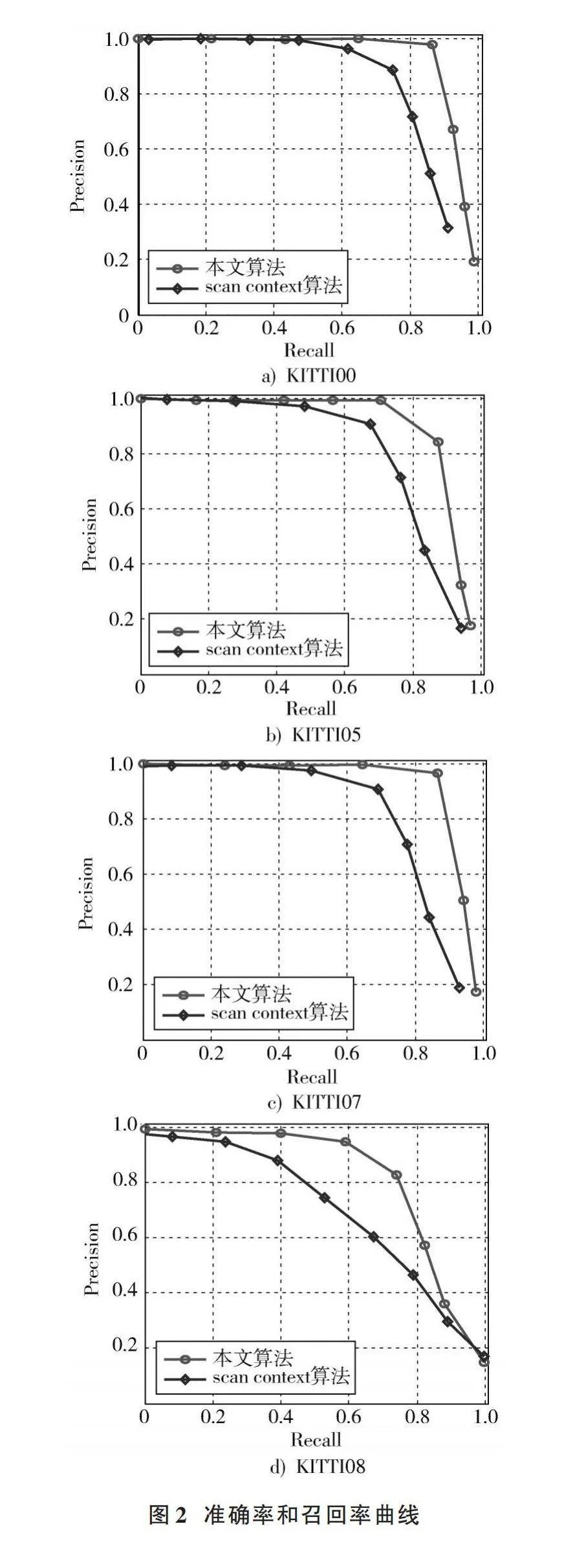
进一步,选用准确率(Precision)和召回率(Recall)作为评价本文算法性能的指标[25],如图2所示。
由实验结果可以看出,本文提出的回环检测算法在所有场景中均优于对比算法,在识别出更多回环的同时保持较高的准确率,在相同召回率的情况下(Recall=0.8),实现回环检测准确率提升了20%。这是因为:本文算法首先对点云发射强度值进行了校正,大大降低点云畸变的影响;同时提出一种基于帧⁃子地图的ICP算法进行位姿变换,将当前关键帧与前面[K]([K]=4)帧点云拼接成局部子地图,回环帧与其前后各[L]([L]=2)帧拼接成子地图,解决了单帧点云数据较为稀疏的问题,有效提升了激光SLAM回环检测的准确率。
3" 船载激光SLAM系统搭建与验证
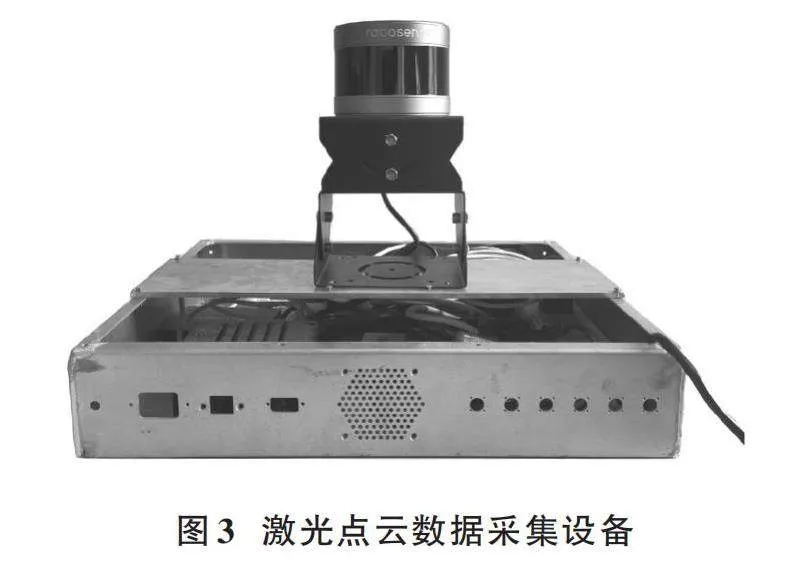
为了进一步验证本文算法在内河水面环境的建图效果,本文搭建了一套激光点云数据采集设备,如图3所示。激光雷达使用速腾聚创RS⁃16,计算单元采用AGX Xavier。点云数据于桂林漓江航段采集,该区域的卫星图像如图4所示。实验采用LIO⁃SAM算法作为性能比较的对象,该算法和本文算法的激光SLAM实验效果分别如图5和图6所示。
从图5a)中可以看出,经过长时间的运动后算法产生的累积误差较大,轨迹偏移严重,导致没有检测出回环区域,进而使该区域处的点云地图产生明显的重影,如图5b)所示。本文船载激光SLAM算法的建图结果如图6所示。由图6a)可以看出,本文算法能正确识别出回环区域,图6b)修正后的轨迹更接近真实情况,相应的点云经过匹配后消除了重影。因此,本文算法在定位精度和建图效果方面有明显改善。
4" 结" 语
本文围绕非结构化航道环境下激光点云有效特征难以提取,导致回环检测准确率低及激光SLAM建图效果差的问题,创新性地引入点云反射强度到激光SLAM的回环检测算法中。本文提出了一种基于点云反射强度回环检测的船载激光SLAM算法,提高了船载激光SLAM回环检测的准确率和时效性。实验结果表明,该算法在内河航道非结构化水域航行环境下具有良好的实用性和性能优势,同时还能够快速建图,可应用于辅助内河智能船舶自主航行、自动靠离泊等领域。
注:本文通讯作者为陈倩。
参考文献
[1] 严新平,李晨,刘佳仑,等.新一代航运系统体系架构与关键技术研究[J].交通运输系统工程与信息,2021,21(5):22⁃29.
[2] 李枭凯,李广云,索世恒,等.激光SLAM技术进展[J].导航定位学报,2023,11(4):8⁃17.
[3] LUO L, CAO S Y, SHENG Z H, et al. LiDAR⁃based global localization using histogram of orientations of principal normals [J]. IEEE transactions on intelligent vehicles, 2022, 7(3): 771⁃782.
[4] 柴梦娜,刘元盛,任丽军.基于激光点云NDT特征的两步回环检测[J].激光与红外,2020,50(1):17⁃24.
[5] LI D, LIU N, GUO Y L, et al. 3D object recognition and pose estimation for random bin⁃picking using partition viewpoint feature histograms [J]. Pattern recognition letters, 2019, 128: 148⁃154.
[6] JONNAVITHULA N, LÜ Y C, ZHANG Z M. LiDAR odometry methodologies for autonomous driving: A survey [EB/OL]. [2021⁃09⁃21]. https://arxiv.org/abs/2109.06120.
[7] 张堡瑞.基于激光雷达扫描和视觉识别结合的水面环境探测[D].绵阳:西南科技大学,2022.
[8] SHAN T X, ENGLOT B J. LeGO⁃LOAM: Lightweight and ground⁃optimized lidar odometry and mapping on variable terrain [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2018: 4758⁃4765.
[9] SHAN T, ENGLOT B, RATTI C, et al. LVI⁃SAM: Tightly⁃coupled lidar⁃visual⁃inertial odometry via smoothing and mapping [C]// 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE, 2021: 5692⁃5698.
[10] ZHANG H, LIU Z Q, WANG Y L. U⁃LOAM: A real⁃time 3D lidar SLAM system for water⁃surface scene applications [C]// 2022 IEEE International Conference on Unmanned Systems. New York: IEEE, 2022: 653⁃657.
[11] 林子祥,张斌,王嘉盛,等.激光雷达IMU紧耦合的室内大范围SLAM方法[J].现代电子技术,2023,46(20):135⁃141.
[12] 李晓,马社祥,李啸.基于卷积神经网络的回环检测算法[J].现代电子技术,2022,45(1):72⁃76.
[13] CHEN G B, WANG B S, WANG X L, et al. PSF⁃LO: Parame⁃terized semantic features based lidar odometry [C]// Procee⁃dings of the 2021 IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE, 2021: 5056⁃5062.
[14] YIN D Y, ZHANG Q, LIU J B, et al. CAE⁃LO: LiDAR odometry leveraging fully unsupervised convolutional auto⁃encoder for interest point detection and feature description [EB/OL]. [2020⁃01⁃10]. http://arxiv.org/abs/2001.01354.
[15] LI Z C, WANG N Y. DMLO: Deep matching LiDAR odometry [C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: IEEE, 2020: 6010⁃6017.
[16] LI Y, LIN W B, ZHA T J, et al. Efficient loop closure detection method for Lidar SLAM in challenging environment [C]// Proceedings of the 2021 IEEE International Conference on Control, Robotics and Cybernetics (CRC). New York: IEEE, 2021: 196⁃199.
[17] BOSSE M, ZLOT R. Place recognition using keypoint voting in large 3D lidar datasets [C]// Proceedings of the 2013 IEEE International Conference on Robotics and Automation. New York: IEEE, 2013: 2677⁃2684.
[18] STEDER B, GRISETTI G, BURGARD W. Robust place recognition for 3D range data based on point features [C]// Procee⁃dings of the 2010 IEEE International Conference on Robotics and Automation. New York: IEEE, 2010: 1400⁃1405.
[19] STEDER B, RUHNKE M, GRZONKA S, et al. Place recognition in 3D scans using a combination of bag of words and point feature based relative pose estimation [C]// Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2011: 1249⁃1255.
[20] HEWITT R A, MARSHALL J A. Towards intensity⁃augmented SLAM with LiDAR and ToF sensors [C]// Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: IEEE, 2015: 1956⁃1961.
[21] PARK C, MOGHADAM P, KIM S, et al. Elastic LiDAR fusion: Dense map⁃centric continuous⁃time SLAM [C]// Procee⁃dings of the 2018 IEEE International Conference on Robotics and Automation (ICRA). New York: IEEE, 2018: 1206⁃1213.
[22] BERECZK N, DUCH A, NEMETH K, et al. Quad⁃kd trees: A general framework for kd trees and quad trees [J]. Theoretical computer science, 2016, 616: 126⁃140.
[23] KIM G, KIM A. Scan context: Egocentric spatial descriptor for place recognition within 3D point cloud map [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. New York: IEEE, 2018: 4802⁃4809.
[24] GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. New York: IEEE, 2012: 3354⁃3361.
[25] WANG Y, SUN Z Z, XU C Z, et al. LiDAR iris for loop⁃closure detection [C]// Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). New York: IEEE, 2020: 5769⁃5775.
作者简介:王池华(1979—),男,湖北荆州人,高级工程师,研究方向为智能船舶、智慧港航。
陈" 倩(1984—),女,广西桂林人,高级工程师,研究方向为智能感知、智能交通。
杨粤衡(2000—),男,湖南衡阳人,硕士研究生,研究方向为智能感知、自动驾驶。
唐" 欣(1988—),男,湖南永州人,博士研究生,高级工程师,研究方向为物联网技术、无线通信及网络。
