
基于图信号处理的频控阵MIMO雷达动目标检测方法
2024-11-30 00:00:00廖可非王海军谢宁波
现代电子技术 2024年23期






















摘" 要: 在复杂信号背景下,频控阵MIMO雷达受到杂波和噪声源的干扰,这极大地降低了其对微弱目标的检测性能。为了应对这一挑战,文中提出一种基于图信号处理的频控阵MIMO动目标检测方法。首先,利用MTI/MTD技术消除多普勒频移项的相位变化;然后构建了FDA⁃MIMO下的图信号模型,并利用回波信号的图傅里叶变换形式建立谱峰搜索响应函数;最终实现对动目标多普勒⁃距离⁃角度参数三维联合估计。仿真结果验证了所提方法在复杂信号环境下相较于经典MUSIC算法能够更准确地估计目标的参数信息,有效提升了微弱目标的检测性能。
关键词: 频控阵; MIMO; 图信号处理; 图傅里叶变换; 动目标检测; 三维联合估计
中图分类号: TN958⁃34" " " " " " " " " " " " " "文献标识码: A" " " " " " " " " " " " 文章编号: 1004⁃373X(2024)23⁃0062⁃07
FDA⁃MIMO radar moving target detection method based on graph signal processing
LIAO Kefei1, 2, WANG Haijun1, XIE Ningbo1, 2
(1. School of Information and Communication, Guilin University of Electronic Technology, Guilin 541004, China;
2. National and Local Joint Engineering Research Center for Satellite Navigation, Positioning and Location Services,
Guilin University of Electronic Technology, Guilin 541004, China)
Abstract: Under the background of complex signals, FDA⁃MIMO radars are subjected to interference from clutter and noise sources, which greatly degrades their detection performance for dim targets. To cope with this challenge, a graph signal processing (GSP) based moving target detection method for FDA⁃MIMO is proposed. Firstly, the phase variation of Doppler frequency shift term is eliminated with MTI/MTD technique, and then the graph signal model based on FDA⁃MIMO is constructed, and the spectral peak search response function is established with the graph Fourier transform (GFT) of the echo signals, which finally achieves the three⁃dimensional joint estimation of Doppler⁃range⁃angle parameters for the moving targets. The simulation results verify that the proposed method is able to estimate the parameter information of the target more accurately in comparison with the classical MUSIC (multiple signal classification) algorithm under the complex signal environment, so the method improves the detection performance of dim targets effectively.
Keywords: frequency diverse array; MIMO; GSP; GFT; moving target detection; three⁃dimensional joint estimation
0" 引" 言
频率分集阵列(FDA)雷达最早由文献[1⁃2]提出,该雷达通过在相邻天线间加入微小频偏,实现了距离⁃角度相关的波束方向图,从而为频控阵在波束形成[3]、目标探测[4]和干扰抑制[5]等领域带来了巨大的潜在优势。为了解决频控阵雷达波束耦合问题,FDA⁃MIMO雷达系统被提出[6],该系统将频控阵和MIMO技术相结合,实现了距离⁃角度的解耦,使得其波束方向图不再呈现“S”型,而是聚焦成点状波束。
近些年来,许多学者发表了与FDA⁃MIMO雷达目标检测相关的技术文章。文献[7]介绍了一种TS⁃FDA⁃MIMO雷达的数据模型,使用强化学习来训练发射权重,以实现最优的目标检测性能;文献[8]探讨了FDA⁃MIMO雷达在面对均匀高斯干扰环境下的自适应检测问题,提出了三种优化策略;文献[9]探讨了在无辅助数据的高斯干扰环境中,利用FDA⁃MIMO雷达框架进行目标检测。上述文献的研究主要集中在目标的距离⁃角度参数,而忽略了多普勒信息的重要性,整合多普勒信息对于FDA⁃MIMO动目标检测技术的发展具有重要意义。
同时,对微弱目标的探测仍然是一项极具挑战性的任务。传统的雷达信号处理方法在面对强烈的干扰和噪声时,往往无法准确地估计动目标的参数信息,导致检测性能下降。文献[10]针对微弱目标检测提出一种空距频聚焦(SRDF)处理新方法,利用MUSIC和稀疏重构算法实现目标运动参数的高精度测量,然而在信噪比低的情况下,会使得信号协方差矩阵的统计估计变差,从而导致参数估计结果不太理想。
传统信号处理方法通常仅关注信号之间的双边关系,却未能有效捕捉数据模型中隐含的相关性和时空特性。近年来,为了改变这一情况,一些研究者提出图信号处理(Graph Signal Processing, GSP)算法,其能够对非均匀和复杂的传感器阵列进行建模,提供了更灵活的估计方法,以适应不同的场景和目标分布,从而有效提高对微弱目标的检测性能[11]。图信号处理算法作为一种新兴的信号处理方法,为FDA⁃MIMO雷达动目标检测提供了新的解决思路。
本文针对基于图信号处理的FDA⁃MIMO雷达动目标检测方法展开研究,通过分析FDA⁃MIMO信号模型,得到多普勒频移矩阵,利用MTI/MTD技术消除多普勒频移项的相位变化,然后借助GSP算法构建数据间的图信号模型,将信号间的空间关系纳入考虑,最后根据图傅里叶变换结果建立谱峰搜索响应函数,实现对动目标多普勒⁃距离⁃角度三维参数联合估计。这一研究旨在充分利用雷达系统中多个天线之间的协作信息,提高在复杂信号环境下的目标检测性能。
1" FDA⁃MIMO信号模型建立
1.1" 发射信号模型
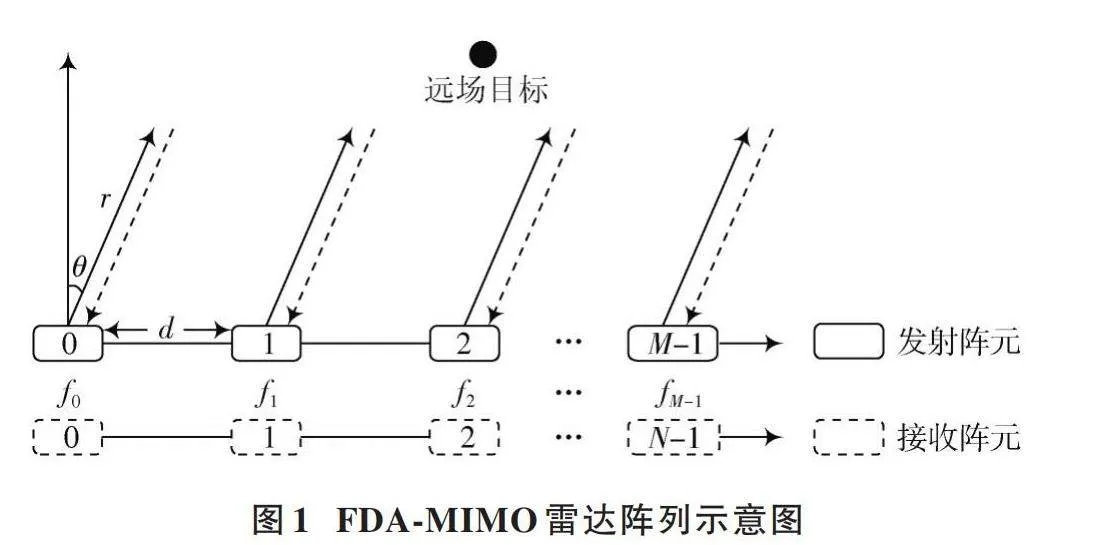
FDA⁃MIMO雷达阵列如图1所示,发射阵元数为[M],接收阵元数为[N],阵列间距为[d=λ/2]的均匀线性阵列。第[m]个发射阵元的信号为:
[sm(t)=ϕm(t)ej2πfmt," "m=0,1,2,…,M-1;" t∈0,Tp] (1)
式中:[fm]为第[m]根天线的载频,满足[fm=f0+mΔf];[ϕm(t)]为第[m]个发射阵元在[t=0]时刻的复基带信号。各个阵元发射的信号波形满足式(2)所描述的关系:
[Tpϕm(t)ϕ∗n(t-τ)ej2πm-nΔftdt=1," " m=n0," " m≠n] (2)
式中:[Tp]表示脉冲持续时间;[·∗]表示共轭运算;[τ]表示任意的时延,且[τ]小于发射脉冲的重复时间[Tp]。
1.2" 接收信号模型
假设目标位于[r,θ]处,则第[m]个发射阵元发射的信号经目标反射到第[n]个接收阵元的时延可表示为:
[τn,m=2rc-mdsinθ+ndsinθc] (3)
因此,第[n]个接收阵元接收到的信号可以表示为:" " " [ynt=ξm=0M-1Sn,mt=ξm=0M-1smt-τn,m=ξm=0M-1ϕmt-τn,mej2πfmt-τn,m≈ξm=0M-1ϕmt-2rcej2πfmt-2rcej2πf0mdsinθcej2πf0ndsinθc] (4)
式中:[ξ]表示回波信号的复幅度,在式(4)的化简过程中,由于频偏远小于载频([MΔf≪f0])以及远场假设[mdsinθ≪r],二次项的值远远小于其他求和项,因此忽略了二次项的值。
接着将接收信号经前置解调和匹配滤波处理可去除时间依赖性,FDA⁃MIMO雷达接收机结构示意图如图2所示。
为了简化分析,将最终得到的信号以矢量的形式表示为:
[y=ξarθ⊗atθ,r+n=ξatrθ,r+n] (5)
式中:“[⊗]”表示Kronecker积运算;[atθ,r∈RM×1]和[arθ∈RN×1]是发射阵列和接收阵列的导向矢量。[atθ,r]和[arθ]分别为:
[atθ,r=1,ej2πf0dsinθc-2Δfrc,…,ej2πM-1f0dsinθc-2ΔfrcT] (6)
[arθ=1,ej2πf0dsinθc,…,ej2πN-1f0dsinθcT] (7)
假设点目标位于[5 000 m,0°]处,其点波束如图3所示。
从图3可以发现,FDA⁃MIMO在不需要频偏设计和阵列结构设计的前提下,具有距离⁃角度解耦能力。
假设FDA⁃MIMO雷达采用脉冲串作为发射波形,并发射[K]个脉冲串,目标以速度[νr]沿雷达径向做匀速运动,对于动目标而言,虽然频控阵中每个发射阵元的载频不同,但由于[Δf≪f0],所以阵元间的回波多普勒频差很小,因此可以忽略脉内的多普勒频移,即多普勒频移项可近似为[ej2π2f0νrcKTp],将式(5)回波信号模型扩展至多普勒域可表示为:
[yk=ξatrθ,r⊗ωkfd+n] (8)
式中[ωkfd]为慢时间维下的目标多普勒频移矩阵,表示为:
[ωkfd=1,ej2πfdTp,…,ej2πfdK-1Tp] (9)
2" FDA⁃MIMO信号模型建立
由式(8)可以发现,动目标回波信号模型多了多普勒频移项[ωkfd],因此对目标位置进行探测时应先在慢时间维消除多普勒频移项的影响[12],利用估计得到的多普勒值[fd]消除多普勒频移项的相位变化,再对距离⁃方位维联合估计,FDA⁃MIMO动目标检测方法流程图如图4所示。
2.1" 基于MTI/MTD脉冲积累的速度估计
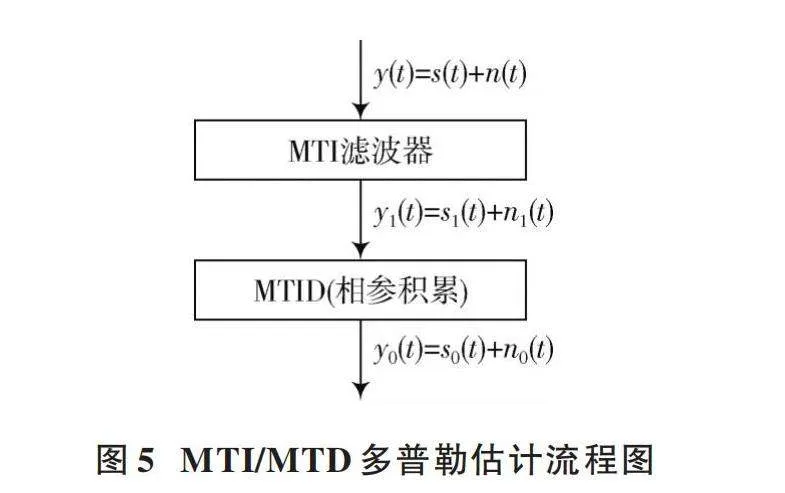
MTI/MTD多普勒估计流程图如图5所示,采用MTI级联MTD的方式。MTI雷达可以过滤静止地物杂波,保留动目标回波,但是无法利用相参积累提高目标的信噪比,也无法区分不同径向速度的目标[13]。与MTI雷达相比,MTD雷达利用一组相邻且部分重叠的多普勒滤波器来实现动目标信号的最佳滤波,由此估计出目标的运动速度。
常用的MTI滤波器包括二次相消器、三次相消器,它们的作用就是通过跨脉冲相消来处理一组回波脉冲,以抑制固定杂波,同时保留回波信号,以第[m]个阵元为例,设第[k]个脉冲回波为[14]:
[skt=ej2πfmt-τkϕmt-τk] (10)
式中:[fm]表示第[m]个阵元的载频;[τk=2R0-νkTpc]表示第[k]个回波脉冲延时,[R0]表示目标的参考距离。经混频处理后得到:
[skt=e-j2πfmτkϕmt-τ0] (11)
由于[ϕt]是窄带信号,所以可以近似认为[ϕmt-τk≈ϕmt-τ0],其中,[τ0=2R0 c]。
以二次相消器为例:
[skt-sk-1t" " " " " =e-j2πfmτkϕmt-τ0-e-j2πfmτk-1ϕmt-τ0" " " " " =e-j2πfm2νkTpc-e-j2πfm2νk-1Tpce-j2πfm2R0cϕmt-τ0" " " " " =μϕmt-τ0] (12)
式中[μ]表示复常数。由式(12)可以发现,经过脉冲相消后,发射波形形状没变,只在幅度上发生了变化,而对静止或缓慢移动的目标来说,由于多普勒特征不存在或不明显,经脉冲相消后杂波基本消除。
最后,对经过MTI滤波的信号进行MTD处理,即通过一组多普勒滤波器组处理相干时间内的脉冲串,以获得运动目标的多普勒信息。这里通过对信号进行快速傅里叶变换(FFT)实现MTD处理,由此得到多普勒估计值[fd]。图6是使用FFT进行MTD处理的仿真图。
2.2" 基于GSP算法的距离⁃角度联合估计
在2.1节已经解决动目标回波中多普勒偏移的影响,接下来就是对目标位置的估计,由式(4)可推导出接收信号经多通道匹配滤波处理后的最终输出信号,可表示为:
[yn,mθ,r=ξe-j2πfm2rcej2πf0mdsinθcej2πf0ndsinθc=ξe-jω0mτ1ejω0nτ2] (13)
式中:[ξ=ξe-j2πf02rc]合并了参考阵元到目标的双程距离延时项;[τ1=2Δfrcf0-dsinθc],[τ2=dsinθc],表明目标的距离⁃角度信息包含于输出的数据向量中。
2.2.1" 图信号处理介绍
图信号处理是通过图结构[G=V,ξ,A]表示信号的,它由顶点集[V=υ1,υ2,…,υM]、连接顶点的边集[ξ=eij]和邻接矩阵[A]组成[15]。[A]中的每个元素[ai,j]表示顶点[i]和[j]之间边的权重。在本文中考虑非负权值有向图,即[ai,j=a∗j,i≥0]。那么,图信号可以定义为信号样本[s=s1,s2,…,sMT∈CM]与顶点集[V]关联起来的映射,记为[s:V→Cυm→sm]。
接下来给出图傅里叶变换(Graph Fourier Transform, GFT)的定义。传统的傅里叶变换是通过将信号表示为一组正交基的线性组合来完成的,这些正交基的系数代表了信号在频域中的特性。类似地,图傅里叶变换也是基于这一思想,但它利用图的邻接矩阵的特征向量作为正交基,从而将图信号投影到这些特征向量上,得到图信号在图谱域(Graph Spectral Domain)的表示。假设邻接矩阵[A]可以对角化,那么可以将[A]的特征分解表示为:
[A=TΛT-1] (14)
式中:矩阵[T=t1,t2,…,tM]的每个列向量是[A]的特征向量;对角矩阵[Λ]则包含相应特征值。图傅里叶变换矩阵定义为[F=T-1]。因此,图傅里叶变换表示为[s=Fs=T-1s],[s=s1,s2,…,sM],称为图傅里叶变换系数,那么,图信号[s]可以表示为:
[s=F-1s=Ts=s1t1+s2t2+…+sMtM] (15)
2.2.2" 基于GSP的联合估计算法
接下来构建FDA⁃MIMO雷达阵列的图信号模型。雷达阵列输出的回波信号构成顶点集,受文献[16]的启发,首先从多发单收阵列的角度出发,以第[n]个接收阵元为例,构造如图7所示的图信号模型。
根据公式(13)可得,第[n]个接收阵元输出的信号向量为[yn=yn,1,yn,2,…,yn,mT∈RM×1],相邻信号之间的相位差可以表示为:
[αθ,Rn,m=yn,myn,m-1=e-jω0τ1] (16)
从图7的图信号模型可以看出,信号节点的数量是[M],所以图信号边的数量为[M×M],边的表达式为式(17),因此,图信号模型下的邻接矩阵[A1]可表示为:
[A1θ,R=120ejω0τ10…ejM-1ω0τ1e-jω0τ10ejω0τ1⋮00e-jω0τ1⋱⋱⋮⋮⋮⋮0ejω0τ1e-jM-1ω0τ10…e-jω0τ10] (17)
邻接矩阵[Aθ,R]随目标位置的不同而变化,当扫描到目标真实位置[θp,Rp]时,该邻接矩阵与目标导向矢量满足式(18)的关系,通过式(18)确定邻接矩阵中的非零元素[17]。
[ynθp,Rp=A1θ,Rynθp,Rp] (18)
联立式(13)和式(18)可求得邻接矩阵[Aθ,R]中的非零元素,并且其余接收阵列的信号均满足以上表达式。根据式(13)可知,[τ1]中的距离⁃角度存在耦合关系,必须将单收阵列拓展到MIMO阵列,利用[τ2]中角度的约束,实现距离⁃角度解耦。将邻接矩阵[A1]乘以[ejω0nτ2]子项,下面将接收阵列拓展到[N]维,可得新的邻接矩阵[An]为:
[Anθ,R=A100…00ejω0τ2A10…000⋮⋱⋮⋮⋮⋮ejω0N-2τ2A1000…0ejω0N-1τ2A1] (19)
同理可得,邻接矩阵[Anθ,R]与其对应的接收回波向量[yn,m]之间满足如式(20)的关系:
[yn,mθp,Rp=Anθ,Ryn,mθp,Rp] (20)
式中:[yn,m=y1,1,…,y1,m,y2,1,…,yn,mT],则[yn,m]就成为了邻接矩阵[Anθ,R]的一个特殊特征向量[Eu],它对应于单位特征值。因此,只需要用图邻接矩阵[Anθ,R]的每条边权值[αθ,Rn,m]就可以构建回波信号[yn,m]的简单表达式。由文献[18]可知,图邻接矩阵[Anθ,R]和协方差矩阵[Rxx]性质一致,都刻画了阵元回波信号之间的关联性,因此可以先对邻接矩阵[Anθ,R]进行特征分解,即:
[Anθ,R=Tθ,RΛθ,RT-1θ,R] (21)
式中:[T]是[Anθ,R]的特征向量矩阵;[Λ]是对应的特征值。对回波信号进行图傅里叶变换从而提取目标的角度和距离信息。
[sθ,R=Fyn,m=T-1θ,Ryn,mθp,Rp] (22)
当搜索到目标位置时,即[θ,R=θp,Rp],图傅里叶变换[s]输出为一个独热向量(one⁃hot vector),其唯一的非零项对应于特征向量[Eu];对于其他情况,即搜索点与目标实际位置不匹配时,图傅里叶变换系数不属于独热结构(one⁃hot structure)。因此,可以构造一个如式(23)所示的谱峰搜索响应函数估计目标的实际位置[θp,Rp]。
[Fθp,Rp=sθ,R-122-1=T-1θ,Ryn,mθp,Rp-22-1] (23)
式中:[s-]表示舍去[s]向量中绝对值的最大元素的向量;[·22]表示向量2⁃范数的平方。首先建立搜索域[θ,R∈R],通过遍历搜索域中的每个点,计算响应函数[Fθ,R],直到求得的响应函数最大,即求解出目标的位置信息。
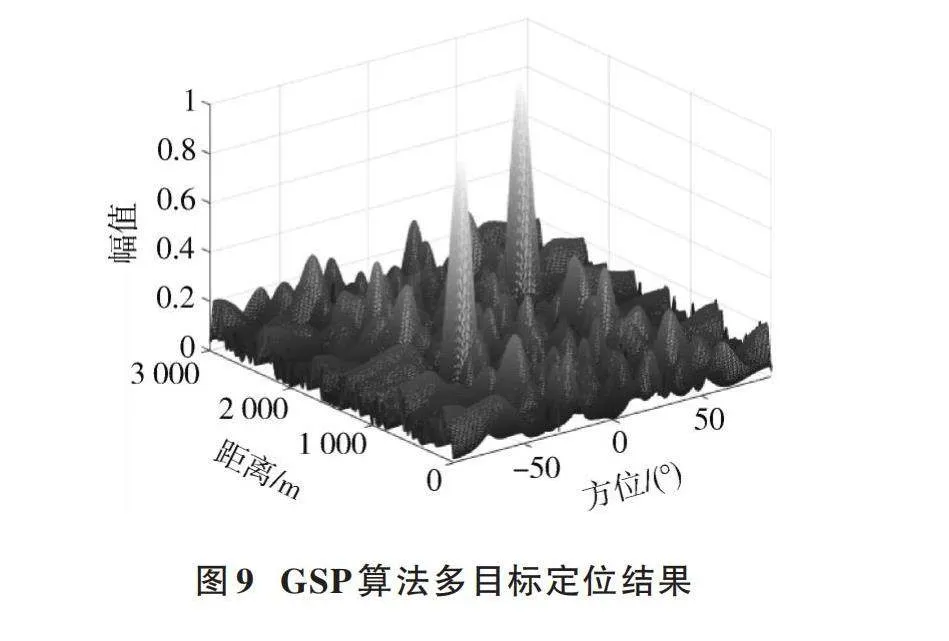
当空间中存在2个远场目标,它们分别位于[1 000 m,-40°]和[2 000 m, 40°]处,在[SNR=-10 dB]条件下,图8首先给出经典MUSIC算法的仿真结果,由图8可得,MUSIC算法构造的协方差矩阵[Rxx]秩降为1,小于信源数目,使得信号源的导向矢量与噪声子空间不完全正交,进而导致MUSIC算法无法精确估计目标的位置信息,而图9呈现了基于GSP算法的FDA⁃MIMO雷达多目标定位效果,从图9中可观察到,在低信噪比条件下,GSP算法可以准确估计出目标的参数信息,估计结果明显优于MUSIC算法。
3" 仿真实验
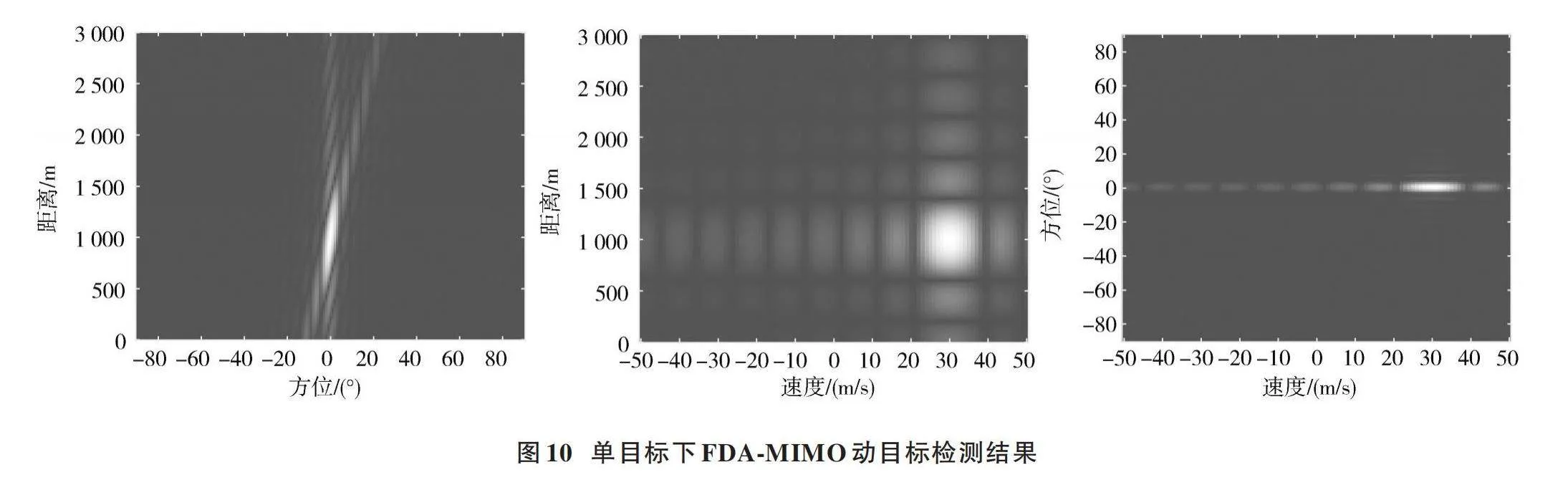
以下通过仿真分析来验证该检测方法的有效性,在单目标和多目标场景下,FDA⁃MIMO雷达动目标检测结果分别展示在图10和图11中。假设存在两个远场目标,目标参数为[1 000 m, 0°, 30 m/s]、[2 000 m, 40°,-30 m/s],仿真的角度范围为[-90°~90°],距离范围为[0~3 000 m],速度范围为[-50~50 m/s],设发射阵元数[M]与接收阵元数[N]均为25,积累脉冲数[K=16],发射载频[f0=1 GHz],阵元间距[d=λ2],频偏[Δf=15×103 Hz]。
从图中可以发现:在检测区域内,待测目标处被明确地标识出来了,检测得到的结果与目标预设的信息一致,并且波束聚焦效果良好,即FDA⁃MIMO阵列具有良好的分辨特性,从实验中会发现:随着脉冲积累数和阵元数的增多,阵列的分辨率会有所提升,主瓣会进一步变窄,但随着频偏增大,不满足[Δf≪f0]这个条件时,阵列波束就会产生散焦现象,进而产生虚假目标点,另外,如果目标速度过快,将会引起多普勒拓展效应,导致不同阵列产生的多普勒频率不一样,此时就不能直接忽略频偏对回波信号多普勒的影响。
4" 结" 论
本文介绍了一种结合MTI/MTD技术和GSP算法的FDA⁃MIMO动目标检测方法,仿真结果表明,该方法可以在低信噪比下实现对动目标多普勒⁃距离⁃角度参数三维联合估计。GSP算法通过对回波信号进行建模得到邻接矩阵,再进行特征分解,利用特征矩阵再对阵元回波数据作图傅里叶变换,从而建立谱峰搜索响应函数,而MUSIC算法通过计算接收到的信号数据的协方差矩阵,进行特征分解,利用信号子空间和噪声子空间之间的相关性来构建谱峰搜索响应函数。在低信噪比环境中,信号协方差的统计估计会变差,从而导致MUSIC算法失效;而GSP算法在构建图信号模型时使用了所有阵列之间的相位关系,所以当搜索点与目标点匹配时,图傅里叶算子和回波信号就会形成线性相位的关系,使得GSP算法比MUSIC算法具有更好的性能。当FDA⁃MIMO雷达对高速运动目标进行探测时,若直接应用常规的MTD处理,会因高速运动引起的距离徙动和多普勒扩展而导致目标回波能量积累严重损失,进而降低目标的检测性能。因此,接下来的研究将主要聚焦于如何有效检测高速运动目标的问题,同时GSP算法估计精度高,但计算量大,改进算法复杂度也是未来的重点研究工作之一。
注:本文通讯作者为谢宁波。
参考文献
[1] ANTONIK P, WICKS M C, GRIFFITHS H D, et al. Frequency diverse array radars [C]// 2006 IEEE Conference on Radar. New York: IEEE, 2006: 1631800.
[2] BAIZERT P, HALE T B, TEMPLE M A, et al. Forward⁃looking radar GMTI benefits using a linear frequency diverse array [J]. Electronics letters, 2006, 42(22): 1311⁃1312.
[3] WANG W Q. Range⁃angle dependent transmit beampattern synthesis for linear frequency diverse arrays [J]. IEEE transactions on antennas and propagation, 2013, 61(8): 4073⁃4081.
[4] GUI R, WANG W Q, FARINA A, et al. FDA radar with Doppler⁃spreading consideration: Mainlobe clutter suppression for blind⁃Doppler target detection [J]. Signal processing, 2021, 179: 107773.
[5] WANG W Q, SO H C, FARINA A. FDA⁃MIMO signal processing for mainlobe jammer suppression [C]// 2019 27th European Signal Processing Conference (EUSIPCO). New York: IEEE, 2019: 1⁃5.
[6] SAMMARTINO P F, BAKER C J, GRIFFITHS H D. Range⁃angle dependent waveform [C]// 2010 IEEE Radar Conference. New York: IEEE, 2010: 511⁃515.
[7] DING Z, XIE J. Data⁃driven transmit weight matrix design method for target detection of the TS⁃FDA⁃MIMO radar [J]. Expert systems with applications, 2022, 210: 118405.
[8] LAN L, MARINO A, AUBRY A, et al. GLRT⁃based adaptive target detection in FDA⁃MIMO radar [J]. IEEE transactions on aerospace and electronic systems, 2021, 57(1): 597⁃613.
[9] HUANG B, JIAN J W, BASIT A, et al. Adaptive distributed target detection for FDA⁃MIMO radar in Gaussian clutter without training data [J]. IEEE transactions on aerospace and electronic systems, 2022, 58(4): 2961⁃2972.
[10] CHEN X L, CHEN B X, GUAN J, et al. Space⁃range⁃Doppler focus⁃based low⁃observable moving target detection using frequency diverse array MIMO radar [J]. IEEE access, 2018, 6: 43892⁃43904.
[11] ORTEGA A, FROSSARD P, KOVAČEVIĆ J, et al. Graph signal processing: Overview, challenges, and applications [J]. Proceedings of the IEEE, 2018, 106(5): 808⁃828.
[12] 刘博伦.基于频控阵雷达的目标检测与跟踪技术研究[D].成都:电子科技大学,2022.
[13] 倪慧俊.探测高速目标的二相编码雷达技术研究[D].南京:南京理工大学,2012.
[14] 林洋.基于FDA的运动目标检测技术研究[D].成都:电子科技大学,2020.
[15] MOREIRA L A S, RAMOS A L L, DE CAMPOS M L R, et al. A graph signal processing approach to direction of arrival estimation [C]// 2019 27th European Signal Processing Conference (EUSIPCO). New York: IEEE, 2019: 1⁃5.
[16] 谢宁波,欧阳缮,廖可非,等.基于图信号处理的频控阵雷达目标定位方法[J].电子与信息学报,2023,45(5):1559⁃1566.
[17] 余泽锐.基于图的SAR三维点云语义分割方法研究[D].桂林:桂林电子科技大学,2022.
[18] LIAO K F, YU Z R, XIE N B, et al. Joint estimation of azimuth and distance for far⁃field multi targets based on graph signal processing [J]. Remote sensing, 2022, 14(5): 1110.
作者简介:廖可非(1984—),男,回族,广西桂林人,博士研究生,教授,主要研究方向为雷达成像、RCS测量、认知雷达等。
王海军(1999—),男,江西吉安人,硕士研究生,主要研究方向为阵列信号处理、雷达信号处理等。
谢宁波(1989—),男,广西桂林人,博士研究生,讲师,主要研究方向为雷达信号处理、图信号处理等。
