
利用CNC技术对三维雕刻机器人的研究与设计
2024-11-25 00:00:00黄秋霞李延辉黄嘉祺汪子剑宋冰宜
科技资讯 2024年20期
摘要:为了降低企业在使用雕刻机器人时的成本,让雕刻机器人更贴合实际生产过程中的需要,通过计算机数控(ComputerizedNumericalControl,CNC)技术设计了一款小型的三维雕刻机器人,利用数字信息技术实现机床运动和加工,降低成本的同时,提高了零件容错率,满足中小型企业的生产需求。主要针对机床本体、控制系统硬件部分电路设计及数控雕刻机的调试展开研究。
关键词:数字信息三维雕刻控制自动化运动控制
ResearchandDesignof3DEngravingRobotUsingCNCTechnology
HUANGQiuxiaLIYanhuiHUANGJiaqiWANGZijianSONGBingyi
XinjiangInstituteofTechnology,Aksu,XinjiangUygurAutonomousRegion,843100China
Abstract:Inordertoreducethecostofenterprisesinusingtheengravingrobotandmaketheengravingrobotmoreinlinewiththeneedsoftheactualproductionprocess,asmallthree-dimensionalengravingrobotisdesignedbyusingComputerizedNumericalControl(CNC)technology.ItutilizesDigitalInformationtechnologytoachievemachinetoolmovementandprocessing,reducingthecostwhileimprovingthefaulttoleranceofpartstomeettheproductionneedsofsmallandmedium-sizedenterprises.Thispapermainlyfocusesonthecircuitdesignofthemachinetoolbody,controlsystemhardware,andthedebuggingoftheCNCengravingmachine.
KeyWords:Digitalinformation;Three-dimensionalcarving;Controlautomation;Motioncontrol
计算机数控(ComputerizedNumericalControl,CNC)三维雕刻机器人作为一种自动化、精密化加工设备,被广泛应用于广告设计、家具雕饰、模具制造等领域[1]。目前,国内的微型广告公司与中小型家具公司等对雕刻生产的需求日益增多,若采用传统的手工加工方式,会出现加工精度差、成品粗糙等现象。但是,市面上可以高精度加工的雕刻机器人存在产品少、价格高、性价比低等问题。因此,本次研究的目的是设计一台成本低、精度高适合广大中小型企业需求的雕刻机器人。利用该研究成果,可以为建筑类、机械类、广告类企业快速进行模型制作,同时也可以为电子类企业进行印刷电路板(PrintedCircuitBoard,PCB)雕刻。并且考虑到技术影响,本文决定采用CNC来对其进行研究。
1研究方法及内容
在材料加工方面,本次研究采用了先进的数值模拟和仿真技术,对CNC三维雕刻机器人的加工过程进行深入分析和优化。在控制系统方面,本次研究通过建立和完善CNC三维雕刻机器人的控制模型,提升其运动精度和稳定性[2];还利用人工智能、大数据等现代技术手段,不断提升CNC三维雕刻机器人的智能化水平,以满足复杂加工任务的需求。同时,本次研究侧重对CNC三维雕刻机器人的多学科交叉研究,通过机械、电子、材料、控制等多个学科的交叉融合,促进了CNC三维雕刻机器人的综合性发展。这为CNC三维雕刻机器人在工业加工、艺术创作等领域的应用拓展提供了有力支持,也为智能制造技术的发展注入了新的活力[3]。
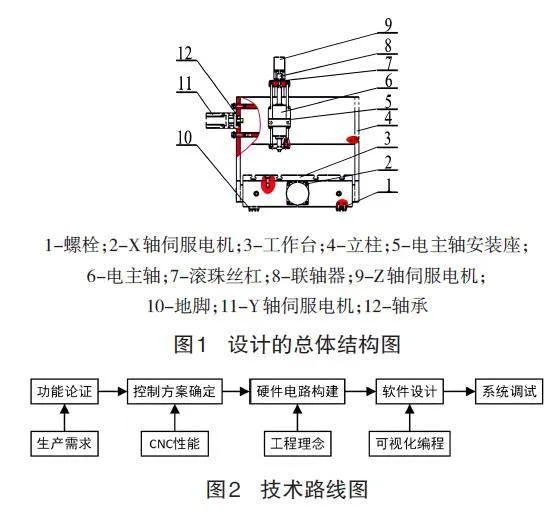
本次研究遵循先进行功能规划,最终在电路设计、软件设计上进行软、硬件综合调试的设计思路,设计的总体结构与具体的技术路线图分别图见1、图2。
按驱动电机进行分类,CNC雕刻机可以分为步进电机驱动和伺服电机驱动[4]。本文介绍的基于CNC的三维雕刻机器人通过伺服电机驱动,相较于步进电机驱动,其雕刻能力会更加精准。本次的研究针对企业在生产过程中的实际需求进行了相关的设计,研究主要内容有以下几个方面。
(1)对建筑企业、广告企业、机械企业和建筑企业的小规模雕刻加工进行调研,确定雕刻的基本对象和功能需求。
(2)机床本体的设计:根据确定的功能需求,对机床结构、传动装置、连接装置进行选择。
(3)对控制系统硬件部分电路进行设计。
(4)上位机软件的制作:主要包括雕刻机用户工作界面编写及其与雕刻软件的集成。
(5)数控雕刻机的调试。
2研究思路
CNC技术的三维雕刻机器人设计原理主要基于CNC技术和机器人技术,其核心在于利用计算机对雕刻机器人进行精确控制,实现三维雕刻的自动化和高效化。
本次研究主要通过机械部分和控制部分两方面内容展开。机械部分主要实现工作台与导轨的排布,CNC技术负责控制雕刻机器人的运动,通过CNC系统,机器人能够按照CAM软件生成的切割路径进行精确的运动。总体控制部分包括硬件和软件两部分,硬件部分包括数控系统、伺服驱动器、变频器等工具,软件部分包括操作系统、编程软件等。这些硬件和软件共同协作,实现对机器人的自动化控制和运动,具体的设计结构图如图3所示。
在雕刻过程中,雕刻机器人通过高速旋转的刀具在工件表面进行精确切割、雕刻和雕塑。由于CNC技术的精确性和高效性,机器人能够在各种材料上进行高精度、高效率的加工,从而完成复杂的三维雕刻任务。
3硬件设计
CNC技术的三维雕刻机器人硬件设计主要涵盖了机器人的核心组成部分,这些硬件组件共同协作,实现机器人的精确运动和雕刻功能。
3.1运动控制器
运动控制器是三维雕刻机器人的核心大脑,它负责接收和处理来自CNC系统的指令,并控制机器人的运动。运动控制器通常采用高性能的处理器和先进的控制算法,以确保机器人运动的精确性和稳定性[5]。本次设计没有采用价格昂贵的可编程逻辑控制器(ProgrammableMotionLogicController,PLC),而是选择使用了可编程运动控制器(ProgrammableMotionController,PMC)。PMC集成了PLC和运动控制器双重功能,控制简单便捷。
3.2伺服驱动器
伺服驱动器是驱动机器人运动的关键部件,它根据运动控制器的指令驱动伺服电机进行精确旋转或直线运动。伺服驱动器具有高精度、高响应速度的特点,能够满足三维雕刻机器人对运动精度的要求。
3.3端子板
端子板是连接运动控制器、伺服驱动器和其他硬件组件的重要接口部件。它负责将不同组件之间的信号线和电源线进行集中管理和分配,确保信号传输的准确性和稳定性。
3.4变频器
变频器主要用于调节伺服电机的电源频率和电压,以实现对电机转速和扭矩的精确控制。在三维雕刻机器人的应用中,变频器能够帮助机器人适应不同的雕刻材料和工艺需求,提高雕刻质量和效率。
4CNC三维雕刻机优缺点分析
本文介绍的CNC三维雕刻机属于经济型的数控雕刻机,其中的伺服电机是该产品的一大特色,其所使用的伺服电机对整个三维雕刻机起着至关重要的作用。
在进行设计的过程中,基于CNC的三维雕刻机器人能够根据雕刻对象的不同采取在线编程方式进行参数调整,可以进行不同格式的矢量图文件的导入,支持二维、三维雕刻;同时要完成自带断电保护功能,能够适应AC100-500V的电压变化范围[6]。
但是,伺服电机对矢量控制的电流、速度、位置三闭环控制算法有着非常高标准的要求,对整个伺服系统起着关键作用,因此,电机转子实时速度测量精度对于改善速度环的转速、控制动静态特性至关重要。
本文介绍的CNC三维雕刻机具有复杂的结构,硬件部分包括运动控制器、伺服驱动器、电主轴、端子板、变频器这5个部分。同时,由于该产品实现了控制电路和执行系统分立式结构设计,它具有许多零部件,以便于适应不同的场景,实现拆卸和组装,因此,这对操作人员和机器维修人员具有较高的要求。同时,CNC三维雕刻机加工路线不易操作,应配备经验丰富操作人员,否则可能会容易出现产品质量差的问题。
5CNC三维雕刻机问题对策
5.1伺服电机故障
伺服电机的常见故障之一是电气故障。电气故障可能是由于电源供电不稳定、电路短路、接线不良等原因引起的[7]。对于这种情况,维护人员需要检查电源线路,确保电源供电稳定,同时检查电路连接是否良好,避免短路或接线不良导致的故障。
其他故障原因还有机械故障和温度过高。当轴承磨损、传动系统故障、零部件松动等原因引起机械故障时,维护人员需要对伺服电机的机械部分进行定期检查和维护,及时更换磨损严重的零部件,确保传动系统的正常运转。在伺服电机长时间高负荷运转的情况下,温度会不断上升,当超过了设定的安全温度范围时,就会导致伺服电机的过热故障。因此,维护人员需要定期检查伺服电机的散热系统,确保散热效果良好,避免温度过高导致故障发生。
5.2加工精度不足
造成加工精度不足的原因可能包括设备老化、导轨磨损、丝杠间隙增大等。为了解决这一问题,维护人员需要对设备进行定期的维护和校准,及时更换磨损部件,确保设备运行的精确性[8]。在进行加工时,工作人员需要根据加工材料的硬度、切削力等因素合理设置加工速度、进给速度、切削深度等参数,以保证加工精度。
6总结与展望
通过对CNC技术在三维雕刻机器人应用中的深入研究,发现CNC三维雕刻机在日常应用和工业制造中均占据重要地位,其高精度和高效率的特点满足了市场的多样化需求,不仅提升了生产效率、降低了生产成本,同时也在保障生产环境安全方面发挥了重要作用。此外,CNC三维雕刻机在设计、操作和维护方面均提出了较高要求,在后续研究中,必须兼顾技术精度、人员配置、系统设计等多重因素,以保障其卓越的性能和领先的效率,从而满足不断提升的市场需求和用户期望。
参考文献
[1]孙美卫.基于多轴机器人的浮雕加工系统设计[J].中原工学院学报,2020,31(4):52-57.
[2]尹方辰,史宏伟,纪清智,等.石材雕刻机械臂运动学性能的分析与优化[J].机床与液压,2022,50(9):24-34..
- 任艳霞,丁刚.数控仿真在教学中的运用[J].河北农机,2019(12):83-84.
- 陈华,杨川,张华.双头雕刻机的设计与研究[J].自动化应用,2022(7):139-141.
[5]周永吉.农业机械电气控制中PLC技术应用研究[J].中国设备工程,2024(3):263-265.
[6]杨柠嘉,赵民.石材雕刻机器人加工产品应用研究[J].石材,2022(1):54-57.
[7]闫玉玲.数控机床电气控制系统故障诊断与管护研究[J].造纸装备及材料,2024,53(4):34-36.
[8]陈静.数控机床加工精度异常诊断的处理与预防研讨[J].现代制造技术与装备,2023,59(11):151-153.
