
无人机集群编队变换虚拟仿真实验设计和实现
2024-11-20 00:00:00詹建国单振宇陶国芳
教育教学论坛 2024年38期


[摘 要] 无人机的视觉智能、智能协同、规划设计是人工智能深度学习技术、视觉识别技术等的成功应用,目前无人机实验因涉及飞行器空域限制、实验安全、人员管理等问题,无法开设实体实验课程,特别是集群编队实验代价巨大。传统教学中,这部分内容以理论讲解为主,效率低、体验差,难以激发学生的学习能动性。运用虚拟仿真手段,引导学生参与无人机集群表演设计全过程,通过编队设计、路径优化、灯光规划等过程,帮助学生体验人工智能项目设计流程和合作方式,掌握无人机集群飞行特点,理解多智能体协同,探索降低碰撞概率的方法,激发学生学习兴趣,提高其实践创新能力。
[关键词] 无人机;虚拟仿真;人工智能
[基金项目] 2022年度浙江省高校实验室工作研究项目“基于AI的无人机编队虚拟仿真实验项目开发”(ZD202201)
[作者简介] 詹建国(1982—),男,浙江诸暨人,硕士,杭州师范大学信息科学与技术学院实验师,主要从事虚拟仿真实验项目建设和人工智能研究;陶国芳(1972—),男,浙江湖州人,学士,杭州师范大学实验室与设备管理处高级工程师(通信作者),主要从事虚拟仿真实验项目建设与管理研究。
[中图分类号] G642.0 [文献标识码] A [文章编号] 1674-9324(2024)38-0001-06 [收稿日期] 2023-03-31
人工智能的工业应用需要融合多专业多学科的知识。尽早让不同专业学生了解和熟悉人工智能技术,有助于他们结合本专业知识实现“人工智能化”的发展。然而,人工智能算法往往比较抽象难懂,需要结合具体应用进行教学讲解。无人机应用可以生动形象地体现这些技术,比如无人机的视觉智能、智能协同、规划设计就是人工智能深度学习技术、视觉识别技术等的成功应用。学生通过参与“机器人与人工智能”课程,可以实现理论知识运用于实际应用的落地,还可培养学生对人工智能的学习兴趣、专业交叉应用能力、实践动手能力,进而培养其创新思维和创新意识[1-2]。
一、实验开设的背景和意义
“机器人与人工智能”是我校面向各个专业学生的通识课程,它围绕人工智能的基本思想、基本理论、基本方法和应用展开,融合了人工智能和机器人技术的前沿知识,帮助学生提高参与人工智能项目的综合能力,为后续发展打下基础。课堂教学采用翻转课堂、过程性评价等方式提高学习的能动性和互动性,引导学生探索人工智能前沿知识。为帮助不同学科背景的学生了解抽象的算法和模型,我们将人工智能技术融入应用系统,在动手实验中加深对方法、步骤和原理的理解。不同专业学生组队参与人形机器人、智能小车、无人机等智能系统项目的开发,并承担不同的角色,从而理解不同专业知识在人工智能项目中的作用,实现多学科的融合和学生的个性化发展。
多智能体协同是分布式人工智能的一个重要分支,也是本课程的一项重要教学内容,主要包括多智能体规划、协商、交互机制等理论,在军事、交通、医疗等众多领域有广泛的应用前景。无人机集群是多智能体协同的一个重要载体和测试场景。近几年,无人机集群的商业表演吸引了大量的目光,也激发了学生的学习兴趣。为帮助学生更好地理解多智能体路线规划技术,本课程引入无人机集群编队实验。学生通过组队设计无人机集群编队表演,探索无人机飞行路径优化方法,体验多智能体协同开发流程。
目前,无人机实验因场地、人数和设备等原因无法开设实体实验课程,特别是集群编队实验代价巨大,还涉及飞行器空域限制、实验安全、耗时、人员管理等问题。传统教学中,这部分内容以理论讲解为主,效率低、体验效果欠佳,难以激发学生学习能动性。本项目运用虚拟仿真手段,引导学生参与无人机集群表演设计全过程,通过编队设计、路径优化、灯光规划等过程,帮助学生体验人工智能项目设计流程和合作方式,掌握无人机集群飞行特点,理解多智能体协同,探索降低碰撞概率的方法,激发学生学习兴趣,提高其实践创新能力[3]。
二、实验目的
第一,帮助学生掌握无人机集群编队变换的基本原理,通过实际案例使学生实践无人机编队设计、编队变换、灯光演示等操作过程,掌握无人机飞行和灯光控制的基本接口;通过完成无人机集群阵列变换项目,体会不同学科知识在人工智能项目分工中的作用,培养人工智能思维,实现知识、技能和素质的有机融合。
第二,帮助学生探索航迹控制和风险控制方法,推动学生探索使用人工智能方法规划最优飞行路径,降低集群系统碰撞发生概率,培养学生解决复杂问题的综合能力;突破学校教学设施的时空限制,使学生能够随时随地单独进行虚拟操作,熟悉无人机集群编队这一人工智能技术的重要载体,提高实验过程的直观性和体验感[4-5]。
三、实验原理、教学过程与实验方法
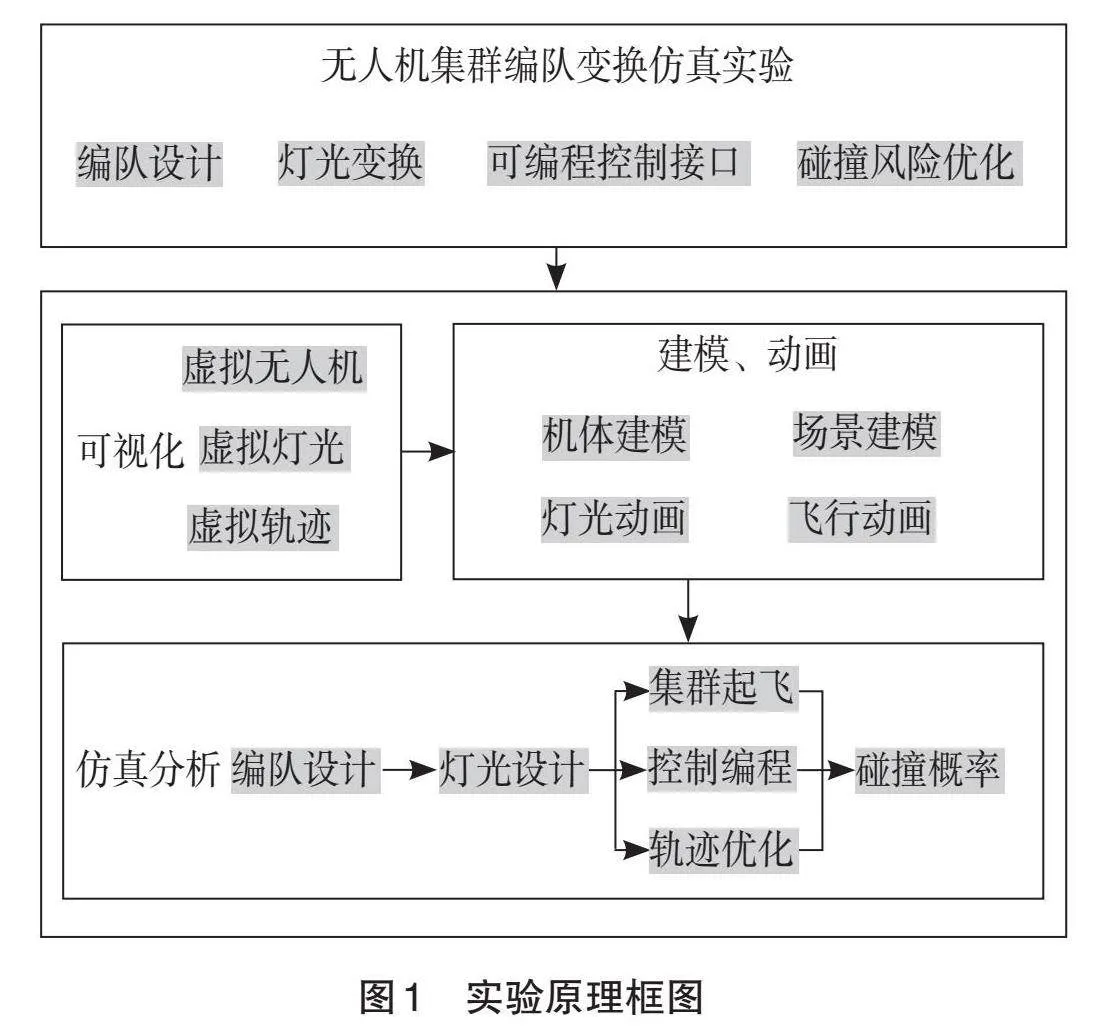
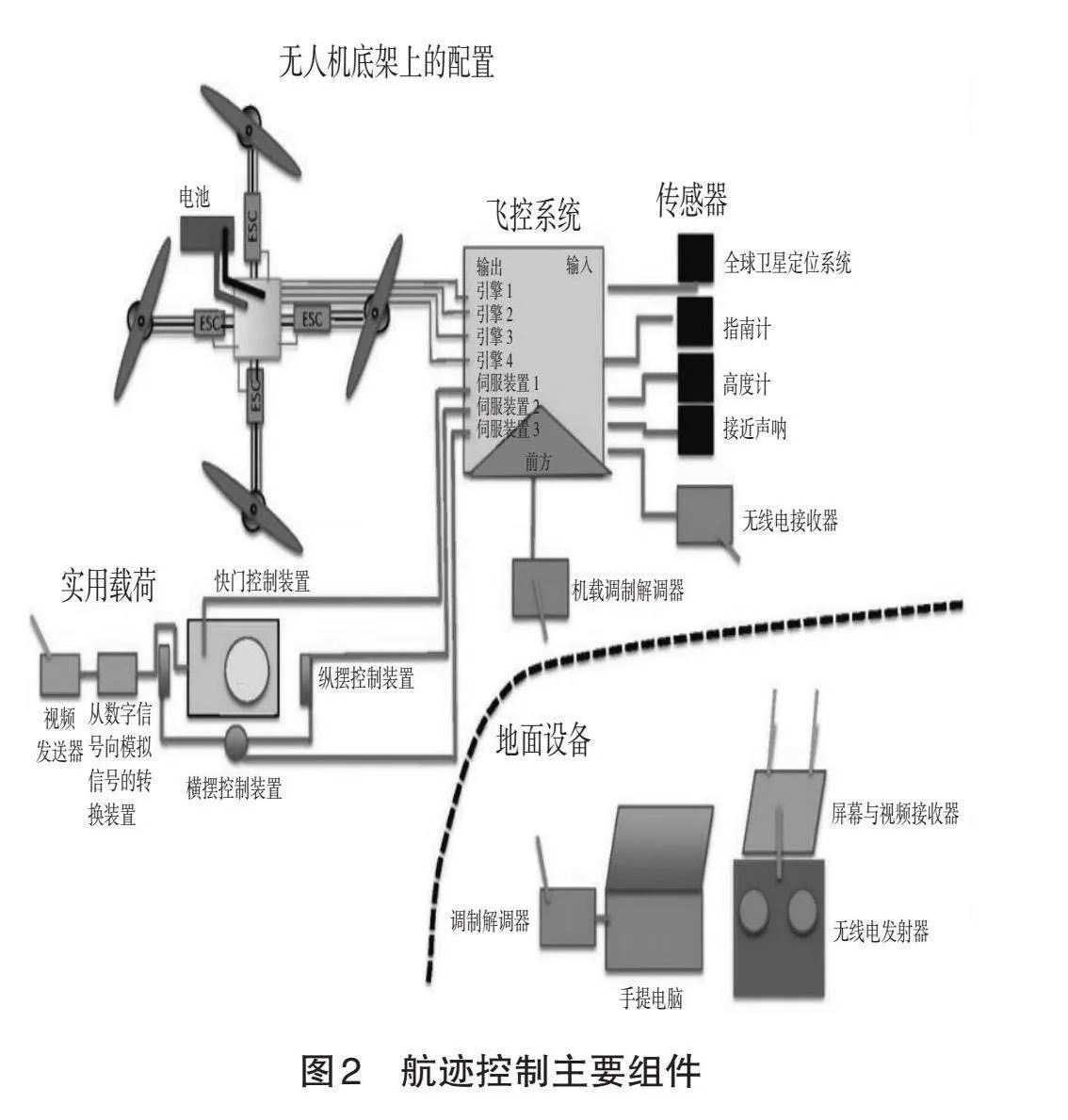
本实验项目通过3D建模、动画模拟、3D人机交互、可视化等方法仿真无人机集群编队变换的动态过程[3],其原理框图见图1。无人机集群不同阵列之间的变化是通过中央处理平台集中控制实现的,航迹控制主要组件见图2。
(一)实物场景下的实验原理
航迹控制原理:控制系统需要事先编排好每架飞机的位置、灯光和航迹方案,再通过每架飞机的飞控、定位、通信等系统实现集群阵列变化的表演[4-5]。
1.飞控系统。本项目仿真四轴可编程无人机。它的飞行控制能力强,可实现前飞、后飞、悬停、平移,以及向任何方向调整自己的位置。为确保无人机飞行稳定,中央处理平台需要掌握一定的飞行数据。传感器可以接收所有加速度、速度、高度、倾斜度的数据,将其转化为电流传输给机上的计算器,并最终传输给中央处理平台。无人机整列变化中需要用到的传感器包括:压力传感器,控制无人机相对于出发点的高度,高度每升高30米,大气压下降千分之一;加速度仪,实时测量无人机倾斜度,控制飞行高度;陀螺仪,共有3个(每条轴线上一个),测量每条轴线上的旋转角速度。陀螺仪对温度很敏感,每次系统启动都会自动校准。
2.定位系统。室外定位系统采用民用GPS,其定位精度只有3~5米。直接用GPS定位,由于难免存在误差,定位精度达不到编队飞行的要求。为提高定位精度,定位时采用差分GPS技术。需要事先在地面上架设一个GPS基准站,地面基准站有事先标注准确的空间坐标,然后跟实时测量到的GPS结果进行差分。无人机则根据收到的误差信息对自己的位置进行实时纠偏。
3.通信系统。中央控制平台和单机之间的通信采用移动通信技术或无线电技术。移动通信技术主要为4G或5G信号,相对于无线电来说带宽更宽,可容许大量的通信设备,缺点是受移动信号范围控制。无线电技术主要为IEEE 802.5令牌环网技术,“令牌”在无人机之间快速反复地传递,确保每一架无人机都有机会与中央控制平台通信,令牌总线逻辑结构如图3所示。
IEEE 802.5的基本原理是利用令牌避免网络冲突,提高网络的数据传送率。传送数据时会由掌握令牌的中央控制设备先发送数据。接收数据的无人机会检查表头,若是送给自己的则进行处理。无论是否是送给自己的,都会再传下去,传一圈后检查资料是否相同以确定资料没有传输错误。送完数据后可依需要调整令牌的优先度,再把令牌传递到下一台无人机。若接收到令牌,但优先度较自己的高,则要把令牌传递到下一台无人机。
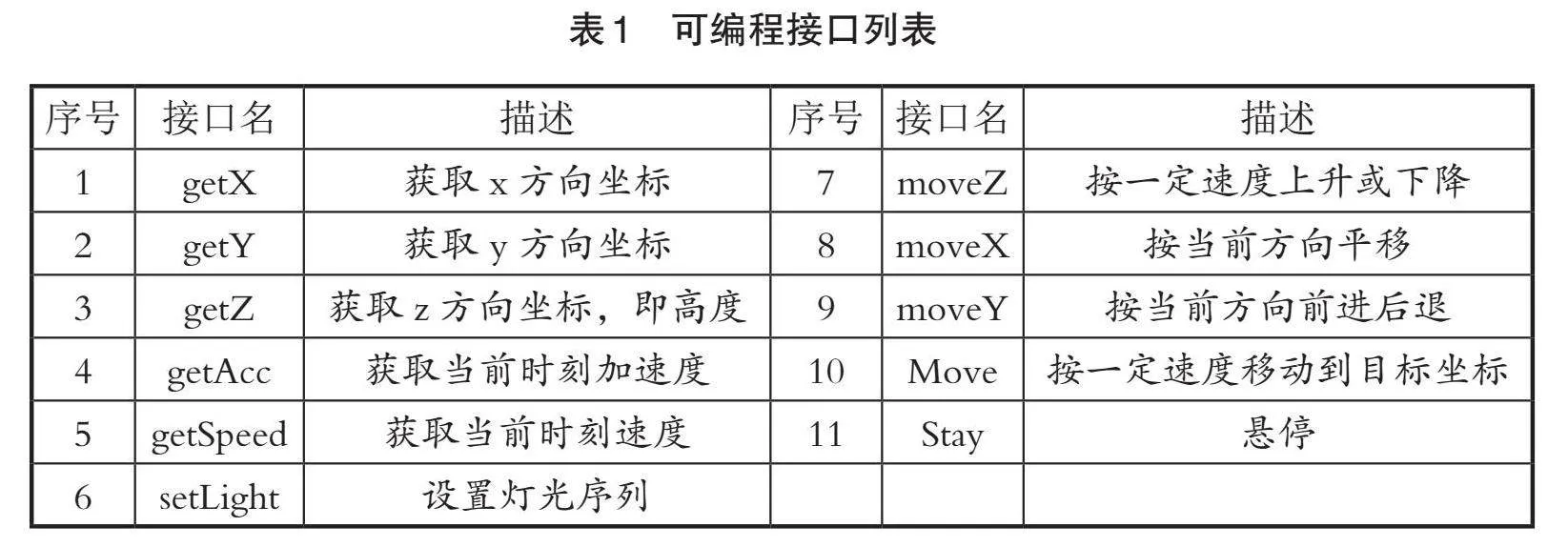
(二)无人机可编程控制接口
中央控制平台通过可编程接口控制无人机集群的阵列变换。控制平台先通过通信系统获取每架飞机的位置、速度、加速度等信息,然后按照预设的航迹给每架飞机发送飞行控制指令,最后再根据位置和加速度信息,对每架飞机的位置进行微调。这些信息的获取和发送,都可以通过中央控制平台的可编程控制接口实现,见表1。
(三)碰撞风险优化原理
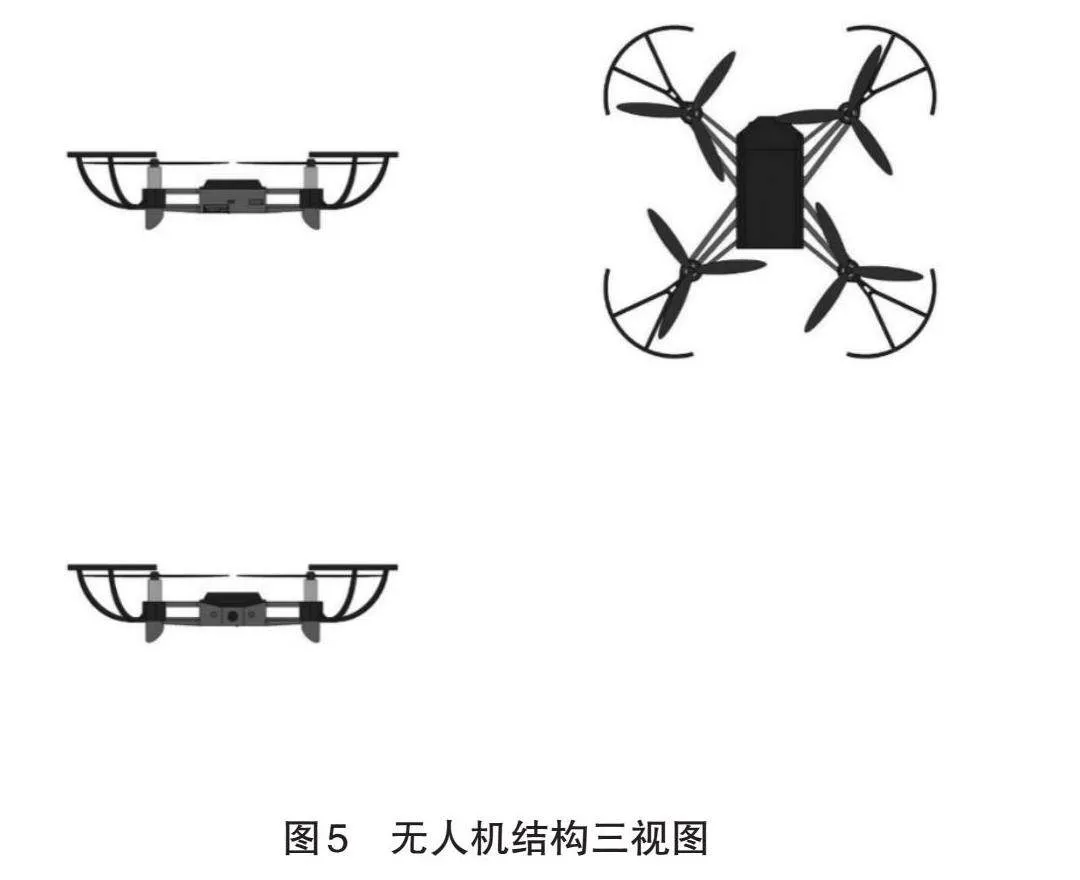
无人机阵列变换要控制好每架无人机飞行的航迹,最重要的是在有限的飞行距离下降低无人机碰撞发生的概率。无人机集群的目标是不能让任何两架飞机在飞行途中发生碰撞,即任何一架飞机的最大碰撞概率表明了整个系统的碰撞风险。编号i和j无人机发生碰撞的概率采用正态分布的形式表示,两架无人机离得越近越容易发生碰撞,计算公式为:
其中,μ为均值,σ表示标准差。dis(i,j)表示两架无人机相距最近时刻的欧式距离,在整个飞行过程中离散化成1秒计算一次相互距离,那么,
其中,T表示两个阵型变化需要的时间间隔,编号为i的无人机在t时刻的坐标为(xit,yit,zit)。无人机集群表演时,不发生碰撞,即需要满足。同时,考虑到无人机飞行会耗费电能,飞行距离越短越好,因为不同无人机之间电源容量相近,保证飞得最远的无人机飞行距离小于设定的电源要求即可,每架无人机飞行的距离需要满足di<dmax,dmax表示每次飞行的最大距离。di定义为:
其中,N表示航迹点的数目,即飞机变化飞行轨迹的重要节点。为减少变速和变轨的复杂性,设定每次阵型变化只允许设置3个航迹点。
碰撞风险优化过程可以理解为保证p<10-6的情况下,di尽可能小。上述求解过程是多目标优化问题,很难找到解析解,可以采用遗传算法求解局部最优解[6-7]。另外,碰撞风险优化是开放性的问题,可以使用除遗传算法之外的人工智能、数学、物理等方法进行优化。
(四)虚拟场景下的实验原理
为让学生更好地理解人工智能的智能体协同概念,对机体、灯光和飞行场景,飞控、定位和通信系统,无人机可编程控制接口,编队变换设计过程以及碰撞概率优化过程进行了仿真。该实验对无人机集群编队过程核心要素仿真度较高,是仿真环境下的真实体验。
1.机体、灯光和飞行场景的建模。无人机仿真采用物理部件3D扫描件,为真实物理部件在虚拟空间的再现,核心要素仿真度100%。灯光为三维平面皮肤覆盖效果,灯光效果仿真度超过80%。图4和图5分别为无人机的立体结构图和三视图。地形场景采用全景效果图方式,体现立体空间位置和大小的关系,实现日照、天地差异的建模。采用物理运行轨迹控件,实现飞机起飞、飞行和降落的动画效果。
2.飞控、定位和通信系统的仿真。本项目通过构建三维坐标系统,确定飞机在虚拟空间的位置和速度,仿真了无人机的加速度、速度、高度传感器。学生可以实时观察每架无人机的状态信息。定位系统采用经纬度坐标转化为XYZ坐标转换方法,实时仿真飞机经度和纬度与三维空间的对应关系。无人机之间的通信由系统控制实现,实现了单机和中央控制系统之间的实时通信,仿真了通信过程,但并未仿真通信协议。
3.无人机可编程控制接口仿真。本项目实现了对常用可编程控制接口函数的仿真。实物系统中,学生编写飞行程序后,导入真实无人机实现飞行控制。在仿真系统中,相同的程序可以直接导入仿真系统,仿真系统进行编译后,实现对虚拟无人机集群的控制。
4.编队变换设计过程的仿真。本项目将编队变换过程分为编队设计、灯光规划和风险控制等步骤,用户通过三维空间的交互操作,实现对编队变换过程的实验。在实验过程中,学生可以按需设置队列阵型和灯光配置,并通过飞行模拟动画查看设置效果。如果设置参数不合理,或者不能正确规划飞行路径,都有可能导致碰撞风险过高。
5.碰撞概率优化过程的仿真。碰撞概率优化的计算过程由人工智能软件完成。学生将计算结果通过无人机可编程控制接口导入仿真系统,实现碰撞概率的优化。学生只有理解、掌握了无人机控制函数和遗传算法,才能获得较佳的航迹路径规划结果。学生在进行验证测试时,实验软件还会记录不同时刻无人机的位置,比较无人机碰撞概率和飞行距离,用于对学生实验结果的客观评价。
四、系统架构、开发环境和运行效果
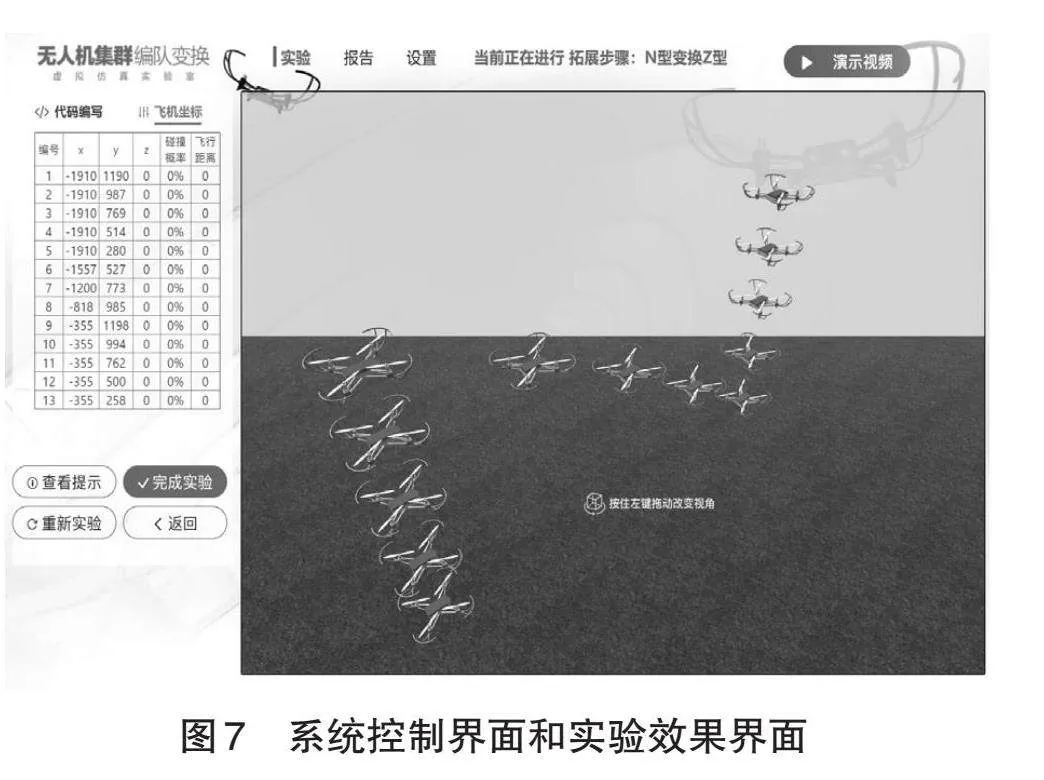
系统平台由远程云服务器和本地实验系统组成,云服务器用于存储实验仿真数据、用户信息、教师评价等内容;本地实验系统分为数据处理、资源管理和系统管理等模块。系统开发技术和运行环境:3D仿真、HTML5,开发工具:Unity 3D、Web 3D开发包three.js,运行环境:服务器CPU16核、内存16 GB、磁盘240 GB、显存1 GB、GPU型号i7-8750H、操作系统Windows Serve,数据库Mysql。无人机集群编队变换虚拟仿真实验平台见图6,系统控制界面和实验效果界面见图7。
五、实施过程和效果
本项目以无人机集群为载体,运用三维建模工具搭建无人机集群编队变换仿真系统,将无人机集群操作涉及的多个知识点融合,学生通过仿真平台体验真实场景下的无人机集群编队表演开发过程。在交互过程中,学生可以通过鼠标和键盘实现自由操作,设计编队阵型、规划灯光模式、查看飞行参数等,实现无人机阵列的旋转和缩放功能;通过可编程接口可以设置各项飞行参数,控制每架无人机的飞行速度、方向和距离。通过虚拟仿真实验,学生加深了对无人机操控体系的理解,提高了对编队控制、风险优化的理解能力;在编队设计和灯光控制环节中,学生可以充分展示自己的空间想象力,实时获取设计结果的动画展示过程,加深对集群控制的理解;在三维场景中,多视角、多尺度完成各个实验步骤,提高编队设计的开放性,倡导探究式学习,提升了学生综合实践能力[6-7]。
参考文献
[1]万其中,李文生.高校实验教学改革与创新人才培养[J].当代教育论坛(宏观教育研究),2007(4):103-105.
[2]贺占魁,黄涛.虚拟仿真实验教学项目建设探索[J].实验技术与管理,2018,35(2):108-111+116.
[3]熊宏齐.国家虚拟仿真实验教学项目的新时代教学特征[J].实验技术与管理,2019,36(9):1-4.
[4]邓磊,段福洲,李家存,等.虚拟仿真实验教学模式探索:以无人机航测综合实习为例[J].科技创新导报,2019,16(35):234-237.
[5]贾宜霖,岳训.引领式空中汉字展示无人机集群的仿真研究[J].无人系统技术,2021,4(3):32-39.
[6]卢燕梅,宗群,张秀云,等.集群无人机队形重构及虚拟仿真验证[J].航空学报,2020,41(4):248-259.
[7]刘艳,刘全德.无人机飞行模拟仿真平台设计[J].科学技术与工程,2022,22(29):12969-12976.
Design and Implementation of Virtual Simulation Experiment for Formation Transformation
of UAV Cluster
ZHAN Jian-guoa, SHAN Zhen-yua, TAO Guo-fangb
(a. School of Information Science and Technology, b. Laboratory amp; Equipment Management Department, Hangzhou Normal University, Hangzhou, Zhejiang 311121, China)
Abstract: The visual intelligence, intelligent collaboration, planning, and design of UAVs are successful applications of artificial intelligence deep learning technology and visual recognition technology. At present, UAV experiments cannot be performed due to issues like air traffic control, safety concerns in conducting experiments, personnel management, and especially the huge cost associated with conducting experiments on the formation and swarming flying, which makes experiments with UAV difficult to carry out. In traditional teaching, this part of the content is mainly based on theoretical explanations, which offers low efficiency and poor experience. This method is also unable to stimulate students’ learning initiatives. This project uses virtual simulation methods to guide students to participate in the entire process of UAV cluster performance design. Through formation design, path optimization, lighting planning, and other processes, the project helps students participate in the designing process and different collaborations, master the special features of UAV cluster flight, understand multi-agent coordination, explore ways to reduce the probability of collisions, stimulate interest in learning, and improve abilities to innovate and to apply the knowledge to practical issues.
Key words: UAV; virtual simulation; artificial intelligence
猜你喜欢
商界(2019年12期)2019-01-03 06:59:05
IT经理世界(2018年20期)2018-10-24 02:38:24
小康(2017年16期)2017-06-07 09:00:59
继续教育(2016年11期)2016-11-24 20:12:46
计算机教育(2016年7期)2016-11-10 09:05:40
科技视界(2016年18期)2016-11-03 22:03:32
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
中国市场(2016年36期)2016-10-19 04:44:13
科技视界(2016年22期)2016-10-18 14:30:27
