
“小虫子”也可以有大作为
2024-11-12 00:00刘志伟詹文成
光明少年 2024年11期
当飞机执行完航班任务,一群机械“小虫子”背着微型摄像头,排着队爬进飞机发动机。不多时,发动机内部的图像信息就传到了操作员手上,操作员通过图片判断发动机内部是否存在漏油、结构损伤(如叶片出现裂纹)等隐患。

当地震发生后,机械“小虫子”成群进入废墟,穿过狭小通道、翻越障碍物执行搜救任务。多个“小虫子”组成了搜救网,准确定位幸存者位置,并向搜救人员传输了幸存者周围废墟的信息。
在信息、材料、微加工等技术高速发展的背景下,上面场景中的机械“小虫子”走进了我们的生活。2024年5月,北京航空航天大学研究团队成功研制出一种具备快速爬行和方向控制能力的微型机器昆虫BHMbot(BeiHang Microrobot),为未来大型机械装备结构损伤检测和灾后救援提供了新思路。
我们一起来了解一下这只神奇的机械“小虫子”。
BHMbot小档案
全名:北航机器昆虫BHMbot
尺寸:2厘米
重量:自重0.34克,集成微型电池、控制电路、通讯电路等模块后总重1.76克
开发者:北航能源与动力工程学院智能推进实验室
主要用途:航空发动机结构损伤检测、灾后搜救、信息侦察等
特长:运动速度快,背负自身质量5.5倍(2克)重物后速度可达25倍身长每秒(和空载的速度相当),与普通蟑螂运动速度相当
Buff:控制策略简洁高效,能轻松实现沿复杂路径爬行、遥控爬行

强劲动力从何而来?
BHMbot采用了两个电磁驱动器作为核心动力来源,其独特的动力方案成功解决了微型机器昆虫承载后速度骤降的难题。对于尺寸在厘毫米级的微型机器昆虫,目前国际上面临的首要技术挑战,是“微型动力系统”的研发。大多数微型机器昆虫在背负微型能源(电池)、控制电路后速度骤降(下降幅度超过90%),甚至根本无法实现爬行。BHMbot采用振动类电磁驱动器作为动力核心,在交流电的作用下,电磁驱动器输出高频率振动,通过灵巧的传动机构设计,将驱动器的振动输出转化为BHMbot前腿的摆动,前腿通过与地面的相互作用实现前进。
从爬行步态来看,BHMbot采用了与哺乳动物类似的奔跑步态。自然界的哺乳动物(如猎豹、犬类等)和部分昆虫(如蟑螂等),在捕食或逃避天敌时往往都采用奔跑步态实现快速前进。在奔跑过程中,身体通过腿部与地面的周期性作用实现腾空,形成类似于弹跳前进的运动方式。BHMbot同样采用上述奔跑步态实现快速前进,当前腿挤压地面时,地面提供给BHMbot向前腾空的作用力,机器昆虫前进的速度由其单次弹跳的距离和每秒弹跳的次数决定。空载时,BHMbot单次弹跳距离较长,与此对应的腾空时间也较长,因而在一秒内机器昆虫弹跳的次数有限;当背负载荷时,机器昆虫单次弹跳距离缩短,单次弹跳所需的时间也缩短,在一秒内可以弹跳的次数更多。弹跳频率和弹跳距离的互补式设计使BHMbot在承载后速度依然可以维持较高水平。

高效控制怎样实现?
除了惊人的爬行速度外,BHMbot的另一卓越性能是爬行方向控制性能。对于厘毫米级的微型机器昆虫而言,现有的通用方案一般是采用多个驱动器控制机器昆虫的腿部运动。然而,过多驱动器必然会提高结构的复杂性,不利于机器昆虫的微型化。针对这一难题,BHMbot采用了与人行走转弯类似的控制方案,通过2个电磁驱动器即可同时实现机器昆虫的驱动和方向控制。人在行走过程中,若左右两条腿的速度保持一致,就可以近似沿一条直线行走;当需要左拐或右拐时,人只需要在行走过程中微调左右腿的速度差。BHMbot便采用了上述控制方案,当左转弯时,它的左侧腿部的速度小于右侧的速度,同理,当右转弯时,右侧腿部的速度小于左侧的速度。在该控制策略下,机器昆虫无需调整腿部运动方式,仅需控制两侧速度的差异就能轻松实现方向控制。
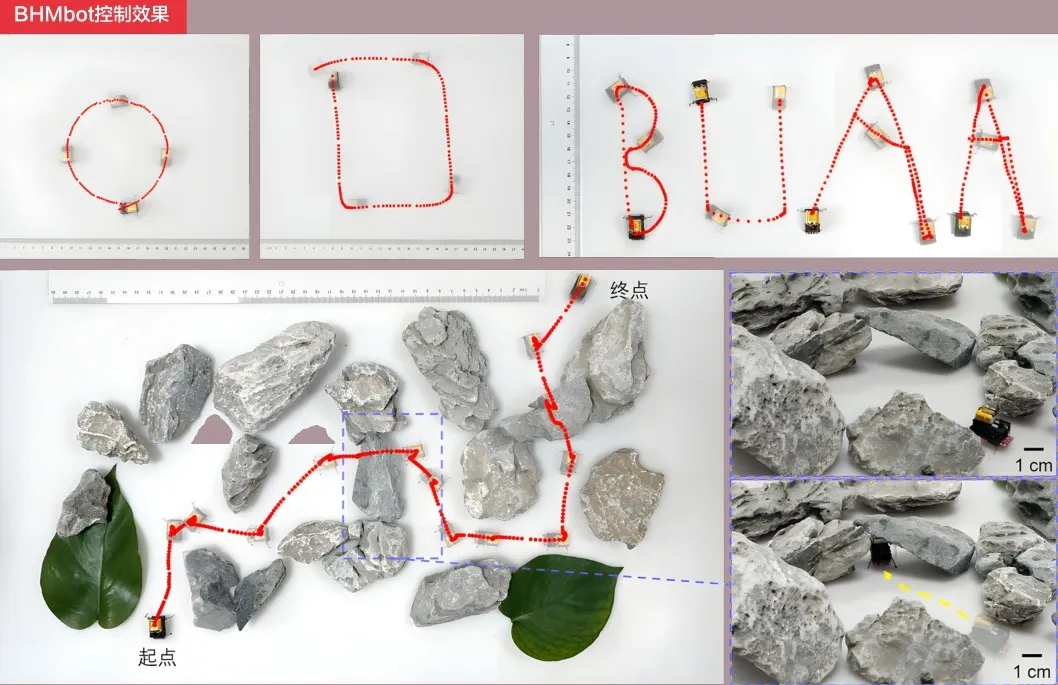
基于上述控制方案,研发团队针对BHMbot的无线控制研发了微型控制电路,同时集成了遥控通讯的功能。目前,BHMbot提供两种操纵模式,第一种模式是程序控制,在爬行任务开始之前,为BHMbot预设一段轨迹代码(如圆、矩形、字母轨迹等),当BHMbot工作时,可沿规定轨迹运动;第二种模式是实时遥控控制,操纵员实时发送操纵指令,BHMbot即可遵循遥控指令实现爬行。

为“上岗”接受重重考验
在快速机动、无线控制的能力保证下,BHMbot目前已实现在特定实验场景的功能验证。首先,是灾后搜救场景验证,BHMbot携带着微型麦克风爬行至模拟废墟,采集废墟中发出的SOS信号并将其实时回传至控制端,任务结束后BHMbot返回至起始点。其次,是航空发动机内部爬行验证,面对航空发动机结构损伤检测,考虑到拍摄图像的需求,BHMbot目前成功集成了一款微型摄像头并能实现图像的实时回传。此外,当BHMbot远距离执行任务时,可通过无人机将其投放至指定位置,完成任务后,它会爬行进入无人机吊舱并通过无人机返回。

尽管BHMbot已在实验室条件下实现了快速爬行、无线控制、传感集成等功能,但距离实际应用还存在一定差距。为实现在航空发动机内开展结构损伤检测,未来还需针对BHMbot吸附爬行(类似于壁虎)和自主避障控制功能开展研发;考虑单个BHMbot作业区域有限,未来应用时往往需要多个BHMbot协同工作,因此,集群控制和集群智能也是BHMbot未来发展的方向之一。

作者单位 北京航空航天大学
光明少年2024年11期