
基于卫星图像匹配的巡检无人机地面三维目标自动定位方法
2024-11-12 00:00:00宋夏楠宋庆敏王继红赵明举邓炬鑫
无线互联科技 2024年19期

摘要:无人机降低飞行高度以节省时间或扩展航程,会导致航片相幅减小、预测与真实位置重叠不足。为此,文章研究了基于卫星图像匹配的巡检无人机地面三维目标自动定位方法。首先获取无人机相机姿态数据,为后续处理提供基础;然后转换三维目标信息,提取三维目标特征,深度分析无人机图像;最后利用卫星图像匹配特征实现定位,精准匹配无人机与卫星图像,实现自动定位。实验证明,该方法定位性能优于对比方法,具有较高的准确性和稳定性。
关键词:卫星图像匹配;巡检无人机;地面三维目标;目标定位;自动定位
中图分类号:TP391.4 文献标志码:A
0 引言
在复杂地形和广阔区域的巡检中,巡检无人机的自主导航和精确定位至关重要。程擎等[1]利用卡尔曼滤波算法估计无人机状态,提高定位精度,但对模型准确性要求高,偏差会导致轨迹偏差。徐卓君等[2]利用多无人机协同作战,快速搜寻和定位地面目标,但通信延迟或协同算法不优可能导致轨迹偏差。本文研究了基于卫星图像匹配的巡检无人机地面三维目标自动定位方法,该技术精度高、覆盖广,弥补了GPS不足,通过匹配无人机捕获与卫星图像,能实现精准定位。本文的研究有望为无人机巡检带来革命性变革,推动技术持续创新。
1 获取无人机相机姿态数据
在巡检无人机应用中,获取相机姿态数据是关键,能明确拍摄位置和朝向,进而准确分析处理图像。
无人机与卫星影像因成像原理、高度差异导致分辨率不同,影像信息更详细丰富[3],卫星影像能提供大尺度地理信息和全局视野。处理时须匹配校准,明确地面分辨率计算公式及尺度缩放系数方法[4]。无人机航拍图像的地面分辨率通常与飞行高度h、像元尺寸a和镜头焦距f有关。其计算公式如(1)所示。
v0=h×af(1)
无人机航拍图像通过图像重采样或插值算法可以表示为:
I^=I×v02zd(2)
其中,v0为无人机航拍图像的地面分辨率,单位是m/pixel。对于特定的卫星地图服务,其计算公式可能是基于2的幂次关系。Z为卫星图像的地面分辨率,通常与卫星地图的级别相关;d为地球赤道周长。经尺度缩放后,无人机航拍图像通过图像重采样或插值算法得到[5],为后续巡检任务提供准确可靠的地理信息支持。
2 转换地面三维目标数据
因各无人机摄像机角度不同,目标坐标在各像元坐标系中各异。每架无人机从同一起飞点出发,建立统一的世界坐标系统,不受无人机视角影响。
坐标在像素坐标系与图像坐标系之间的转换过程为:用齐次坐标(Wx,Wy,Wz,W)来表达三维空间(x,y,z)的坐标。转换公式如(3)所示。
x=WxW,y=WyW,z=WzW(3)
因此,无人机坐标系中的目标位置点的直角坐标如(4)所示。
A=[Ax,Ay,Az,1]T(4)
其中,Ax、Ay、Az为目标在无人机坐标系的位置。在不存在三向位姿的情况下,无人机坐标系与无人机航迹坐标系重合。在此基础上,综合考虑机身3个方向的姿态(偏航M1、俯仰M2、横滚M3),在无人飞行器坐标系中,目标的位置坐标为:
B=M1·M2·M3·A(5)
从公式(5)可以得到物体的世界坐标。最终,地面平台将目标的全局坐标、目标类别以及目标特性等信息与其他无人机共享。
3 提取巡检无人机地面三维目标特征
首先须确定参考区域:
r=R(x,βUh+a,βUw+b)(6)
式中,R为参照卫星影像;x为基准卫星图像中摄像机在计算之后的像素位置;β为比例系数;Uh为空中影像的高度;Uw为空中影像的宽度;a、b是阈值。针对特定的二值图,利用它来表达目标物体的分布特性信息,即:
E=β[q11′,q22′,…,qnn′]T(7)
特征提取主要由对目标物体的分布特性信息上的关键点进行检测。计算公式如下:
H(x,β)=E·Yxx(x,β)Yxy(x,β)
Yxy(x,β)Yyy(x,β)(8)
其中,Yxx(x,β)为这一点的二次高斯卷积微分。在此基础上,对关键点附近的哈尔波小波响应进行分析,得到关键点的主要方位,并构建相应的特征矢量完成提取。
在巡检无人机地面三维目标自动定位中,该算法的应用将有助于提高目标识别的准确性和定位的实时性,为巡检任务的顺利完成提供有力支持。
4 利用卫星图像匹配特征实现定位
利用卫星图像匹配特征实现定位,结合无人机与卫星平台优势,实现高精度自主定位。卫星图像匹配技术起关键作用,对噪点和图像变换具鲁棒性。每个提取的特征点,通过比较周围像素亮度差异生成二进制字符串。对于特征点p,在其周围选取n对像素点(xi,yi)和(xj,yj),计算这些像素点对的亮度差异并进行二值化处理:
τ(p;xi,yi;xj,yj)=1ifI(xi,yi)>I(xj,yj)
0其他(9)
其中,I(xi,yi)和I(xj,yj)分别为像素点(xi,yi)和(xj,yj)的亮度。二值化处理后,针对某一特定的无人机航拍影像,寻找与该特征点之间的最接近点,通过对特征点间的距离进行对比,找出最优匹配点。
5 实验
5.1 实验准备
本文依托EOSAT平台,获取某市公园卫星图像资料作为无人机航拍基础数据。为增强数据集多样性,采用加噪声、调对比度、水平翻转等手段,每类样本增至500张,构建含672000张图片、1344类区域的数据集。按8∶1∶1划分训练、验证、测试集,确保训练有效、评估公正。
为了进一步验证文中匹配方法的有效性,使用交并比RIoU作为客观评价指标,对匹配结果进行评价。
RIoU=Be∩BtBe∪Bt(10)
式中,Be为预测的矩形框面积;Bt为地面真实的矩形框面积。其值越大,表明真实值与测试值越接近,从而得到的图像匹配效果也更好。
5.2 试验结果与分析
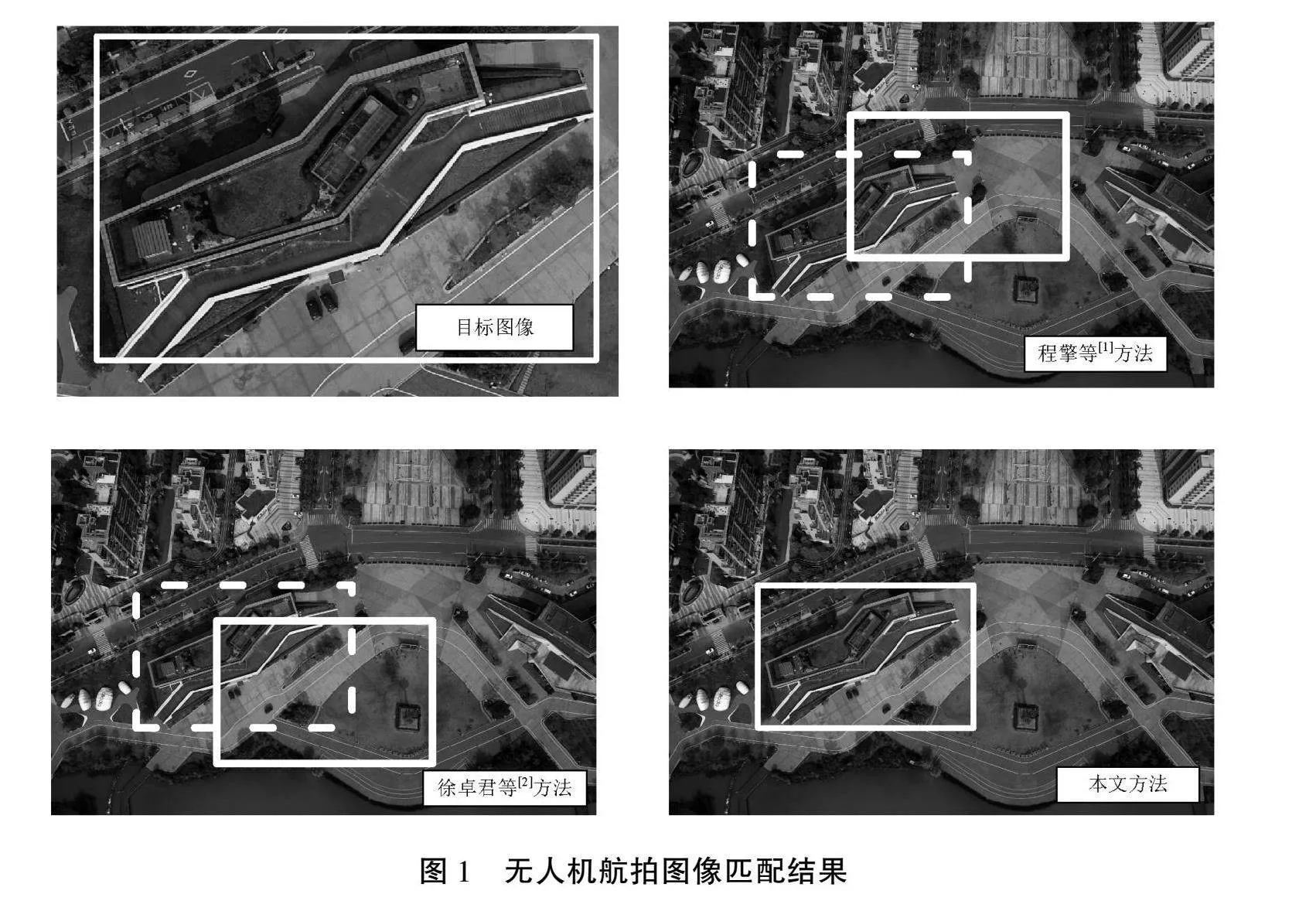
基于图像的地面真实位置和预测位置之间的重叠率作为试验评估指标,对本文提出的巡检无人机地面三维目标自动定位方法、程擎等[1]方法以及徐卓君等[2]方法进行试验分析。
图1中,程擎等[1]和徐卓君等[2]方法图的实线矩形为每个方法的预测位置,虚线矩形为地面真实位置。可以看出,本文方法的匹配结果与地面真实位置最接近,明显要优于其他2种方法。统计所有图像的定位重叠率,可知:本文方法、程擎等[1]方法、徐卓君等[2]方法的平均重叠率分别为92.3%、85.7%、80.1%;3种方法的标准差分别为2.1%、3.2%、3.8%。这表明本文方法在定位性能上更优,且标准差低,证明了其稳定性和可靠性。综上所述,本文提出的巡检无人机地面三维目标自动定位方法重叠率高,定位准确且稳定,为实际应用提供了有力支持。
6 结语
本文研究的基于卫星图像匹配的巡检无人机地面三维目标自动定位方法,能精准匹配卫星图像,迅速识别并定位地面目标,降低人工干预需求,提高巡检自动化水平。然而,该方法受天气、云层等自然因素影响,图像质量下降会影响匹配准确性,但其发展潜力巨大。随着遥感技术的进步和卫星图像分辨率的提高,期待更精准高效的定位方法出现。综上,本文方法虽有不足,但效果和潜力令人瞩目,期待未来能得到更完善的发展,为无人机巡检领域带来创新与突破。
参考文献
[1]程擎,李怡恒,鲁合德.基于扩展卡尔曼滤波的无人机辅助定位研究[J].电光与控制,2023(12):93-97,103.
[2]徐卓君,王耀祥,黄兴,等.多无人机地面移动目标搜寻和定位[J].吉林大学学报(工学版),2023(3):832-840.
[3]王骞仟,熊源,姜涵,等.支持场景表观差异的无人机图像视觉定位方法[J].空间控制技术与应用,2024(1):56-67.
[4]任艳,刘胜男,陈新禹,等.不同季节下无人机航拍图像与卫星图像匹配方法研究[J].弹箭与制导学报,2023(5):16-24.
[5]曹子龙,童小华,许雄,等.基于空地影像多层级匹配的火星巡视器定位与地面验证[J].测绘学报,2023(4):579-587.
(编辑 沈 强)
Automatic positioning method of UAV ground based on satellite image matching
SONG Xianan, SONG Qingmin, WANG Jihong*, ZHAO Mingju, DENG Juxin
(College of Electronic and Electrical Engineering,Zhengzhou University of Science and Technology, Zhengzhou 450064, China)
Abstract: The UAV reduces the flight altitude to save time or expand the range, resulting in the decrease of the aerial phase amplitude and insufficient predicted overlap with the real position. To this end, this paper studies the automatic 3 d target positioning method of inspection UAV based on satellite image matching. Firstly, UAV camera attitude data is acquired to provide the basis for subsequent processing; then convert 3 D target information, extract 3D target features and deeply analyze UAV images; finally, use satellite images to match the UAV and satellite images to achieve automatic positioning. The experiments show that the localization method is better than the comparison method and has high accuracy and stability.
Key words: satellite image matching; UAV inspection; ground 3D target; target positioning; automatic positioning
