
跨层四向穿梭车仓库复合作业路径优化
2024-11-11 00:00田梦龙张纪会
复杂系统与复杂性科学 2024年3期

摘要: 针对跨层四向穿梭车作业空载率高、等待时间长等问题,需要充分优化穿梭车和提升机的协作水平,考虑四向穿梭车和提升机在运动过程中的变速过程,以出入库订单任务的总时间最小为目标,建立了四向穿梭车和提升机联合调度的混合整数规划模型。结合四向穿梭车和提升机在仓库拣选阶段的实际约束,提出了一种改进鲸鱼优化算法,并与模拟退火算法、基础遗传算法、改进的黑猩猩优化算法进行了比较。结果表明,设计的算法求解质量更好,并有效缩短了仓库拣选作业时间。
关键词: 四向穿梭车;跨层;复合作业;路径规划;鲸鱼优化算法
中图分类号: TP391;O224文献标识码: A
Cross-layer Four-way Shuttle Warehouse Composite Operation Path Optimization
TIAN Menglong, ZHANG Jihui
(a. Institute of Complexity Science; b. Shandong Key Laboratory of Industrial Control Technology, Qingdao University, Qingdao 26607 China)
Abstract:In order to address the problems of high empty rate and long waiting time of cross-level four-way shuttle during its operations, it is necessary to fully optimize the level of cooperation between shuttles and hoisters. Considering the variable speed of the four-way shuttle and the hoister in the movement process, with the objective of minimizing the total operation time of the inbound and outbound order tasks, a mixed integer planning model for the joint scheduling of the four-way shuttle and the hoister is established. An improved whale optimization algorithm is proposed in combination with the actual constraints of the four-way shuttle and hoister in the warehouse order picking process, and compared with simulated annealing, genetic algorithm, and an improved chimpanzee optimization algorithm. The results show that the designed algorithm has much better solution quality and effectively reduces the time in completing given order picking task.
Keywords: four-way shuttle; cross layer; compound operation; path planning; the whale optimization algorithm
0 引言
随着快递物流业的迅速发展,传统仓库已经不能满足日益增长的货物存储要求,逐渐向自动化、智能化方向发展。面对小批量、多种类的订单情况,密集化仓储很大程度上缓解了企业的压力。跨层四向穿梭车和提升机协同作业是智能化密集仓储的一种应用类型。和传统穿梭车相比,四向穿梭车不仅可以前后运动,而且可以左右运动,因此拥有更强的自主性和灵活性。四向穿梭车搭配提升机进行跨层仓库作业的方式包括单入库作业、单出库作业和复合作业,其中,复合作业可以大大减少作业完成时间,因此跨层四向穿梭车仓库复合作业的路径优化研究变得特别重要。
目前,国内外学者对四向穿梭车在仓储系统的流程及配置优化进行了研究。宋佼蓉[1]对四向穿梭车仓储系统的出入库复合调度策略进行了研究,并针对多层共享四向穿梭车作业模式,提出了动态区域控制法;占翔南等[2]针对多深度四向穿梭车仓储系统存在多台穿梭车同时作业造成的冲突死锁问题,对储货区制定了路径定向策略;张经天等[3]将提升机调度问题转化为含运输时间的柔性作业车间调度问题,并考虑同层任务的执行顺序约束;何昕杰等[4]针对批量订单出库问题,建立了订单排序优化模型,缩短了四向穿梭车与提升机之间的交互作业时间;段绿辉[5]针对系统任务调度过程中可能出现的穿梭车冲突问题,提出了基于路径时间窗的冲突类型判断和冲突消除方案;刘瑞萍[6]针对四向穿梭车系统中存在的调度冲突问题,通过动态图论构建了一种基于时间窗法改进的A*算法进行路径优化;Mao[78]将提升机和穿梭车的并行性融入到四向穿梭车系统中,并研究了并联式和串联式两种不同模式下的作业优化问题。
国内外学者在穿梭车跨层操作以及路径优化方面也有了很多研究。王姗姗等[9]将系统复合作业路径优化归结为任务指派问题,以完成一批拣货任务的总时间最小为目标建立优化模型;汤洪涛等[10]提出改进的人工蜂群算法,有效解决了跨层跨巷道穿梭车仓储系统的复合三维作业路径优化问题;于巧玉等[11]将任务出库期限引入调度策略,并使用蚁群粒子群双层智能优化算法对模型进行求解;陈寿伍[12]借鉴不相关并行机的混合流水线模型的思想,建立了基于复合命令作业模式的以订单任务总完成时间最小为目标的任务调度模型;鲁建厦等[13]建立了出入库复合作业时间模型,并设计了基于复合作业的改进人工鱼群算法;杨玮等[14]针对仓库资源配置涉及因素众多难以优化的问题,提出了平均吞吐时间和成本集成的配置优化方法;Wang等[15]应用改进的模拟退火算法求解多层穿梭车任务调度问题;Zhu等[16]提出了均衡任务和改变缓冲区状态两种策略优化方法,实验结果表明,考虑两种优化策略可以缩短拣选总时间。
1 问题描述和数学模型
1.1 问题描述
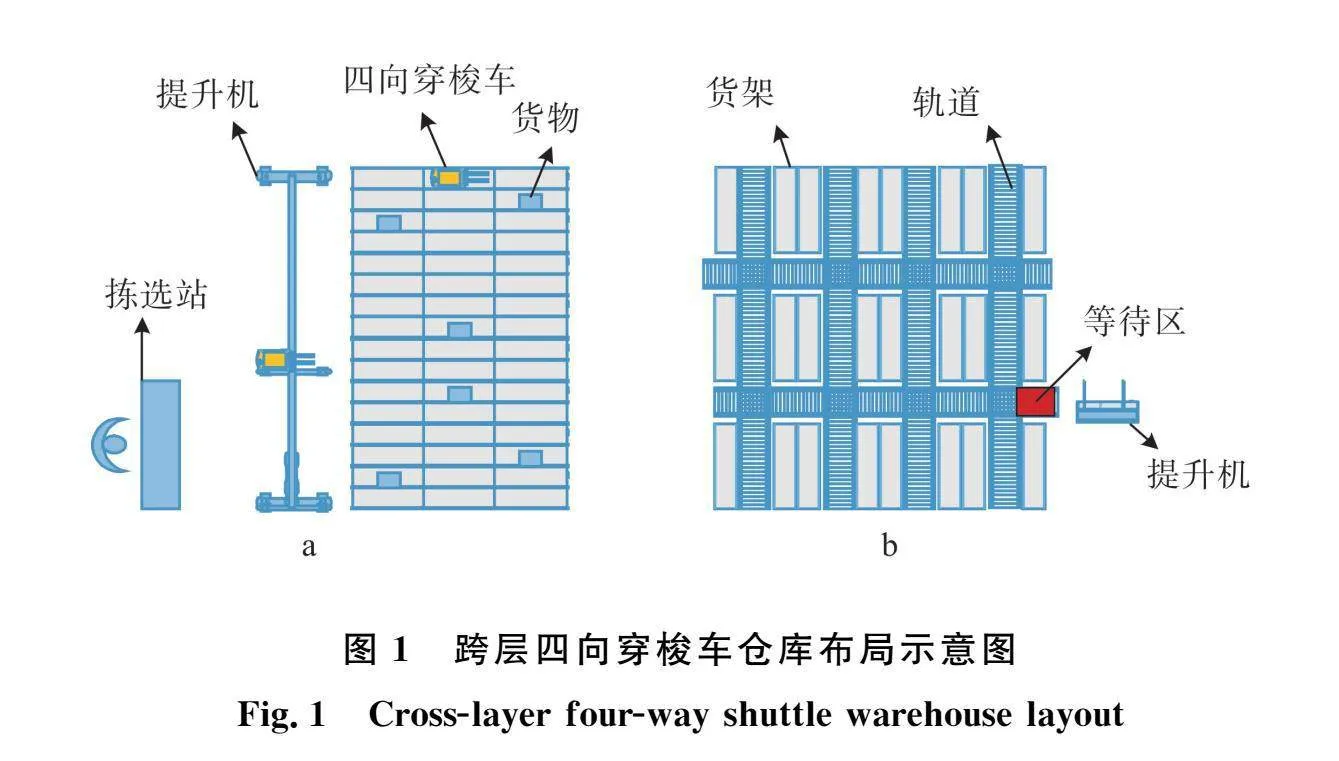
跨层四向穿梭车仓库拣选作业由四向穿梭车、提升机、货架、拣选站和轨道等设备完成。四向穿梭车负责运载出入库货物,提升机负责运载四向穿梭车进行换层,通常位于每层的货架外侧;货架实现高层密集仓储,可以容纳更多的货物;在拣选站处完成拣选工作。跨层四向穿梭车仓储系统的侧视图如图1a所示、俯视图如图1b所示。
跨层拣选作业需要四向穿梭车和提升机协同完成,作业类别包括入库作业和出库作业。入库作业的基本流程是:拣选站处补货,由四向穿梭车运载货物,搭乘提升机到达指定层数的货架进行存储。出库作业的基本流程是:四向穿梭车在目标货架取到货物后,搭乘提升机到第一层的拣选站由工作人员进行拣选。作业方式包括单一出库作业、单一入库作业和复合作业。复合作业就是将出库作业和入库作业接替进行,直至完成给定的作业任务。采用复合作业模式可以有效减少穿梭车的空运载运行时间与等待时间。
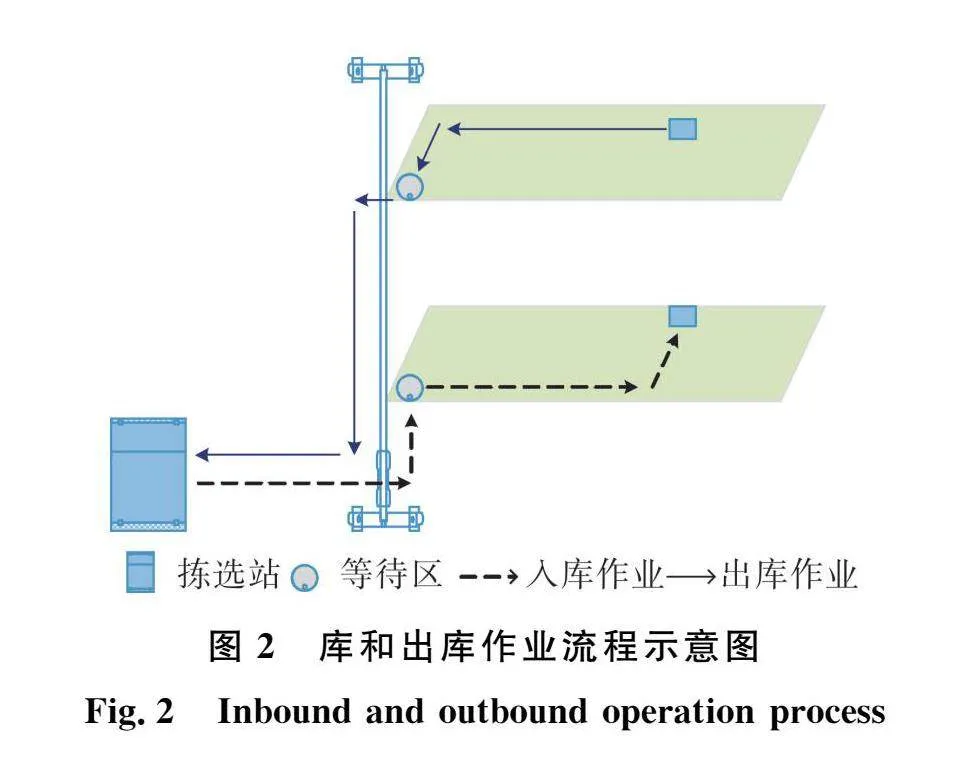
一个出库作业和一个入库作业可以组成最小规模的复合任务,它可以被划分为4个阶段:1)穿梭车运载出库货物到达本层等待区,等待调用提升机;2)穿梭车运载货物到达拣选站进行卸货;3)穿梭车运载入库货物到达第一层等待区,等待调用提升机;4)穿梭车运载入库货物到达指定的目标货架进行存货(见图2)。
当控制中心生成订单后,这些订单会被分派给不同的四向穿梭车。在运载货物过程中会依据规则选择搭乘不同的提升机,避免因分配不合理而产生过多的等待时间。具体流程:
1)四向穿梭车执行出库任务,当穿梭车接收到出库指令时,首先判断与目标货物位置是否位于同一层。
(1)穿梭车与货物不同层:四向穿梭车前往本层巷道出入口的等待区,调用提升机;提升机到达四向穿梭车所在的货架层,四向穿梭车搭乘提升机去往货物所在的货架层;四向穿梭车到达货物所在的货架层,规划路线去目标货架取货;四向穿梭车取到货物后,前往本层巷道出入口的等待区,调用提升机;四向穿梭车搭乘提升机到达第一层后,去往拣选站。
(2)穿梭车与货物同层:四向穿梭车直接去往目标货架取货;四向穿梭车运载货物前往本层巷道出入口的等待区,调用提升机;四向穿梭车搭乘提升机到达第一层后,去往拣选站。
2)四向穿梭车执行入库任务,当穿梭车接收到入库指令时,首先判断穿梭车是否需要提升机辅助操作。
(1)穿梭车需要提升操作:四向穿梭车在拣选站取货后,去往第一层巷道出入口的等待区;四向穿梭车搭乘提升机到达货物所在层;四向穿梭车运载货物去到指定的货架进行存货操作。
(2)穿梭车不需要提升操作:四向穿梭车在拣选站取货后,直接到第一层目标货架进行存货操作。
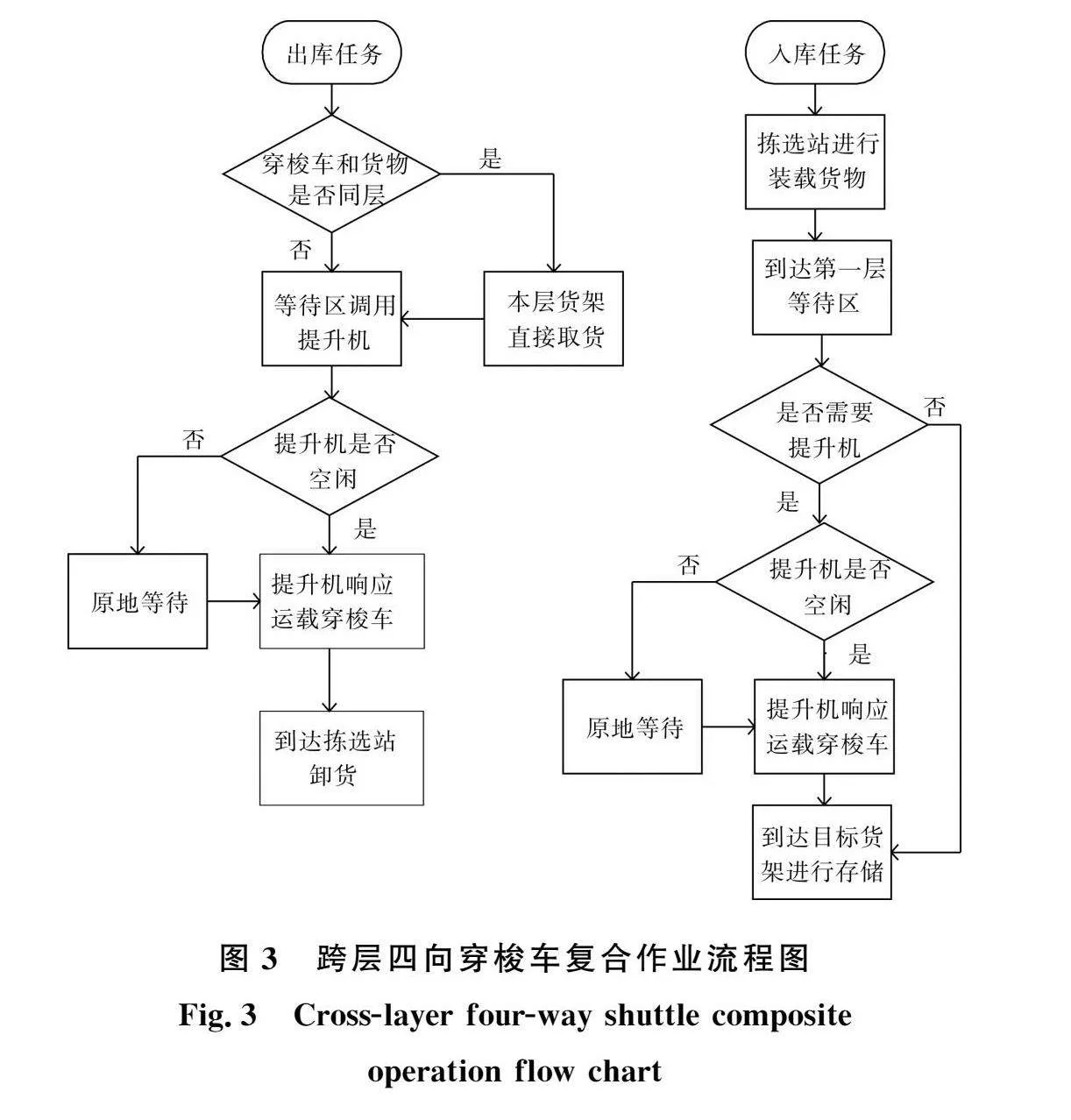
四向穿梭车和提升机的协同水平决定了一批出入库任务的完成时间。在上述流程下,对货物进行分配,选择其对应的穿梭车、提升机以及拣选站,出发地和目的地都明确,在此基础上进行任务排序优化。四向穿梭车、提升机和拣选站配合的复合流程如图3所示。
1.2 数学模型
根据跨层四向穿梭车仓库作业流程,作如下基本假设:1)出入库货物的货位信息和四向穿梭车的位置是已知的;2)四向穿梭车一次只能运输一个货物;3)提升机一次只能运输一辆四向穿梭车;4)当四向穿梭车负载货物到达拣选站时,它立即卸下货物并装载新货物返回;5)不考虑发生故障问题。
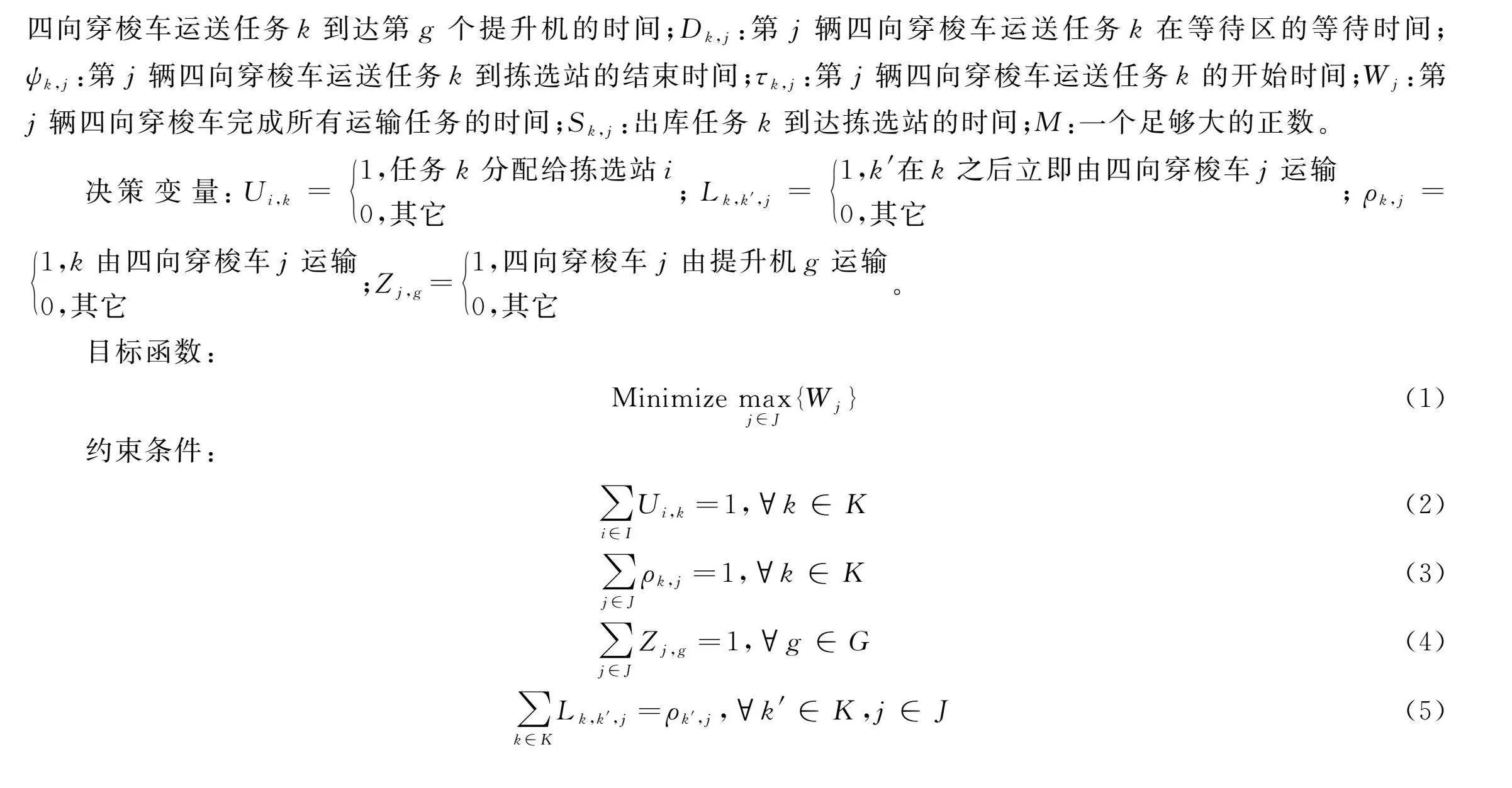
符号说明:I:拣选站集合;G:提升机集合;J:四向穿梭车集合;K:出入库任务集合;h:单位存货/取货时间;o o2:四向穿梭车的起始位置和终止位置;C1j,k:第j辆四向穿梭车从出库货位运送任务k到达当层出库等待区的时间;C2j,k:第j辆四向穿梭车运送任务k从提升机到达拣选站/存储货架的时间;C3j,k,g:第j辆四向穿梭车运送任务k到达第g个提升机的时间;Dk,j:第j辆四向穿梭车运送任务k在等待区的等待时间;ψk,j:第j辆四向穿梭车运送任务k到拣选站的结束时间;τk,j:第j辆四向穿梭车运送任务k的开始时间;Wj:第j辆四向穿梭车完成所有运输任务的时间;Sk,j:出库任务k到达拣选站的时间;M:一个足够大的正数。
决策变量:Ui,k= 任务k分配给拣选站i0,其它;Lk,k′,j= k′在k之后立即由四向穿梭车j运输0,其它;ρk,j= k由四向穿梭车j运输0,其它;Zj,g= 四向穿梭车j由提升机g运输0,其它。
目标函数:
Minimize maxj∈JWj(1)
约束条件:
∑i∈IUi,k= k∈K(2)
∑j∈Jρk,j= k∈K(3)
∑j∈JZj,g= g∈G(4)
∑k∈KLk,k′,j=ρk′,j,k′∈K,j∈J(5)
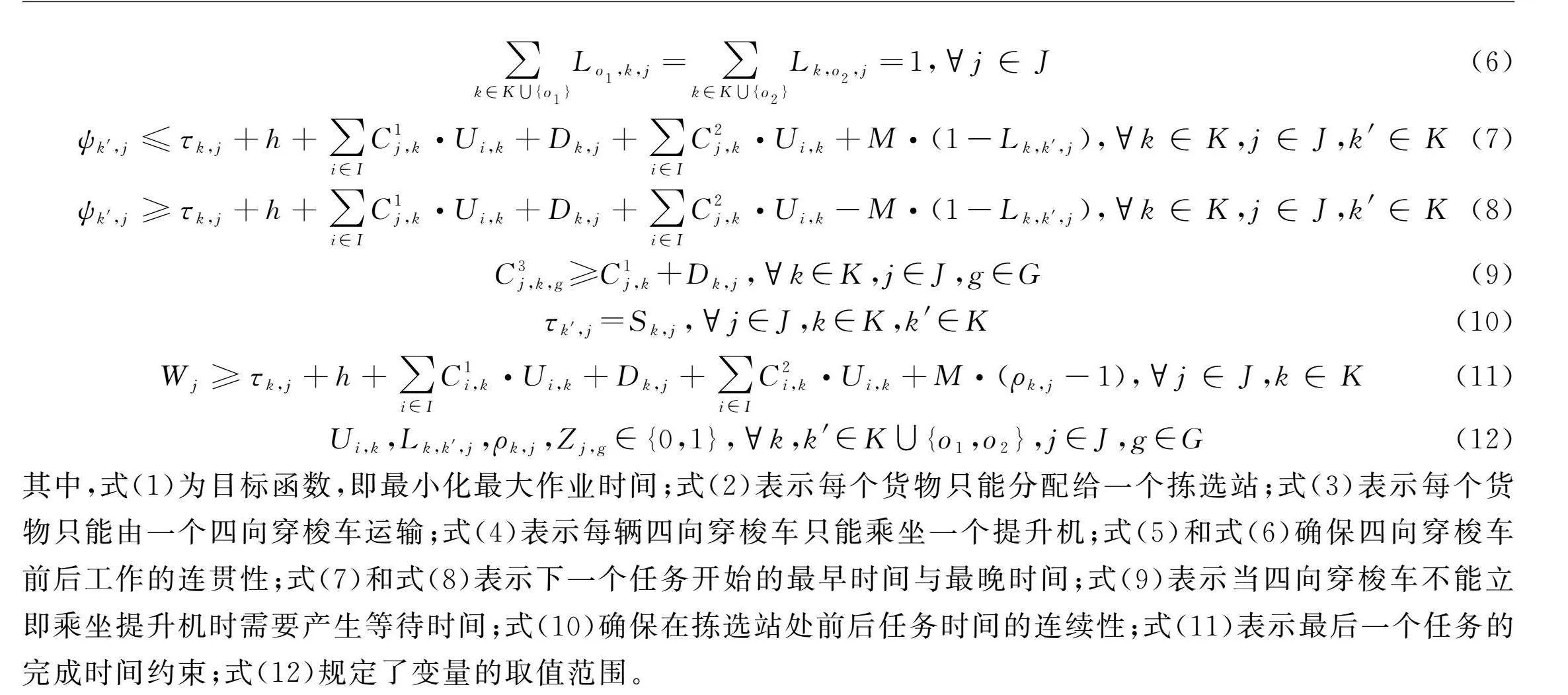
∑k∈K∪{o1}Lo k,j=∑k∈K∪{o2}Lk,o2,j= j∈J(6)
ψk′,j≤τk,j+h+∑i∈IC1j,k·Ui,k+Dk,j+∑i∈IC2j,k·Ui,k+M·(1-Lk,k′,j),k∈K,j∈J,k′∈K(7)
ψk′,j≥τk,j+h+∑i∈IC1j,k·Ui,k+Dk,j+∑i∈IC2j,k·Ui,k-M·(1-Lk,k′,j),k∈K,j∈J,k′∈K(8)
C3j,k,g≥C1j,k+Dk,jk∈K,j∈J,g∈G(9)
τk′,j=Sk,j,j∈J,k∈K,k′∈K(10)
Wj≥τk,j+h+∑i∈IC1i,k·Ui,k+Dk,j+∑i∈IC2i,k·Ui,k+M·(ρk,j-1),j∈J,k∈K(11)
Ui,k,Lk,k′,j,ρk,j,Zj,g∈0, k,k′∈K∪o o2,j∈J,g∈G(12)
其中,式(1)为目标函数,即最小化最大作业时间;式(2)表示每个货物只能分配给一个拣选站;式(3)表示每个货物只能由一个四向穿梭车运输;式(4)表示每辆四向穿梭车只能乘坐一个提升机;式(5)和式(6)确保四向穿梭车前后工作的连贯性;式(7)和式(8)表示下一个任务开始的最早时间与最晚时间;式(9)表示当四向穿梭车不能立即乘坐提升机时需要产生等待时间;式(10)确保在拣选站处前后任务时间的连续性;式(11)表示最后一个任务的完成时间约束;式(12)规定了变量的取值范围。
2 算法描述
2.1 基本鲸鱼优化算法
鲸鱼优化算法(Whale Optimization Algorithm)模拟了座头鲸的社会行为以及泡泡网捕食策略,该算法分为3个阶段,即寻找猎物阶段、包围猎物阶段和泡泡网捕食阶段,算法步骤见文献[17]。
2.2 改进的离散鲸鱼优化算法
鲸鱼优化算法是应用于连续领域,它与其他算法相比具有很强的竞争力。在解决离散优化问题时,需要对其改进。改进的鲸鱼算法在解决仓库作业问题时要联系实际,如生成初始种群采用特定策略;在泡泡网捕食阶段采用多种邻域搜索策略,以寻找更优的目标。
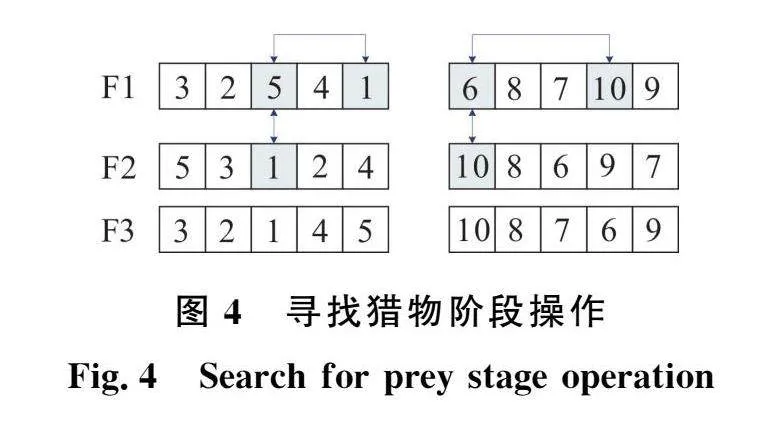
2.2.1 寻找猎物阶段离散化
在连续领域鲸鱼算法中,是当前个体向种群中的随机个体靠近探索,在离散鲸鱼算法中,当前出库任务和入库任务随机向种群中某个体的出库任务与入库任务靠近,且出库任务和入库任务分开操作,如图4所示。
在图4中,1~5为出库任务,6~10为入库任务,F1为当前个体,F2为随机个体。出库任务选择第三个位置点,F1的出库任务5要变成任务1,在F1中检索出任务1的位置进行两交换操作,可进行多次交换操作,入库任务也进行相同操作,F1经变换后成为F3。
2.2.2 包围猎物阶段离散化
包围猎物阶段是当前个体向种群中的最优个体靠近探索,在离散鲸鱼算法中,当前出库任务和入库任务向种群中最优个体的出库任务与入库任务进行靠近,且出库任务和入库任务分开操作,如图5所示。
在图5中,1~5为出库任务,6~10为入库任务,F1为当前个体,F2为最优个体。入库任务选择第三个位置点进行变换,F1的5号任务和F2的1号任务相对应,F1将自身的5号任务和1号任务进行两交换,可进行多次交换操作。出库任务选择第一个和第五个位置点进行相同操作,F1经变换后成为F3。
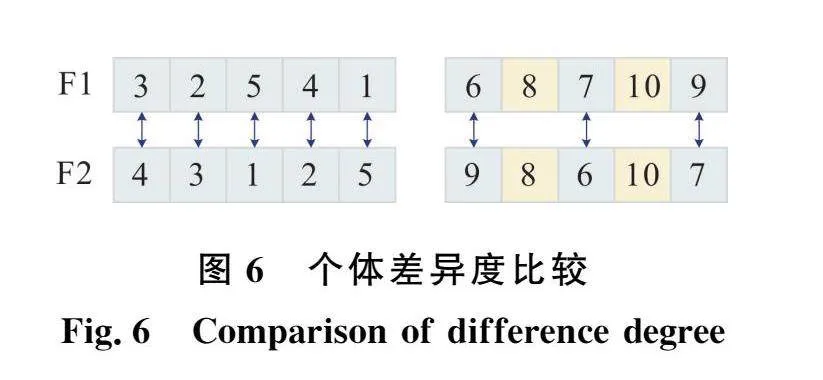
2.2.3 泡泡网捕食阶段离散化
在离散鲸鱼算法中,螺旋运动改成多种邻域操作去探寻更优秀的目标。首先计算当前个体和最优个体之间的差异度,以差异度为参考确定邻域搜索次数。差异度取为汉明距离,将两个个体中的任务序列从头到尾一一比较,不一样的任务数量总和定义为差异度。以图6为例,共有8处不同,因此F1与F2的差异度为8,进而邻域操作最大次数设定为8。
多次邻域搜索可以探寻到更优的个体,但寻找猎物阶段和包围猎物阶段的操作容易早熟,从而导致算法陷入局部最优,因此在捕食阶段采用多种邻域搜索方式防止陷入局部最优,具体搜索操作:1)两交换操作:将属于不同四向穿梭车的任务进行交换操作,或者是属于同一辆四向穿梭车的不同任务进行交换操作。2)插入操作:将属于同一辆四向穿梭车的某个任务插入到另一处特定的位置。3)逆序操作:将属于同一辆四向穿梭车的某段任务进行逆序排列。4)变异操作:将属于某辆四向穿梭车的某个任务分配给其他车辆。
泡泡网捕食阶段具体步骤:
步骤1 计算当前个体和最优个体之间的差异度,确定最大邻域搜索次数。
步骤2 判断操作次数是否大于最大搜索次数,若大于最大搜索次数则结束,个体进行一次逆序操作。
步骤3 多种邻域搜索方式,以轮盘赌方式选择一种操作。
步骤4 计算适应度值,若适应度值优于原来的值,则保留更好的值,结束操作;若没有优于原来的值,则搜索次数加一,返回步骤2。
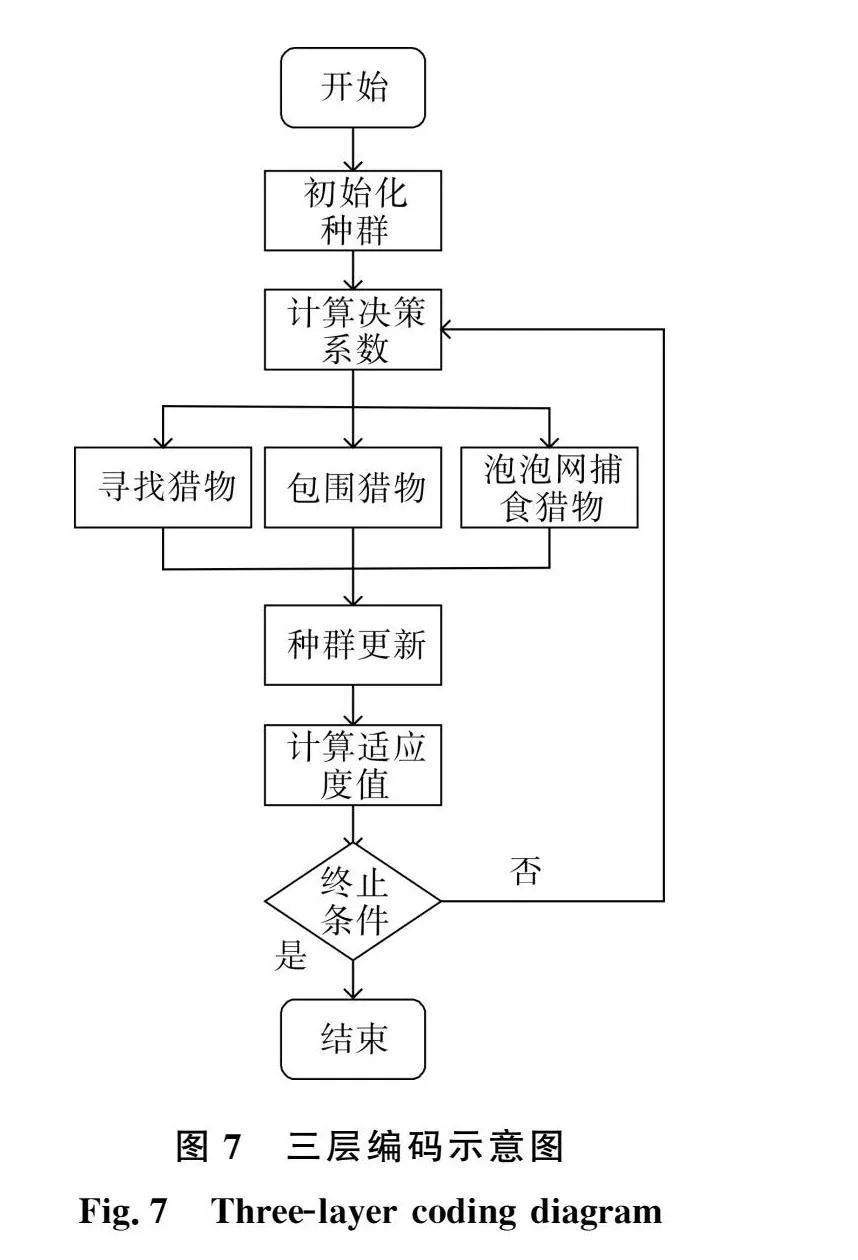
2.3 改进的鲸鱼优化算法设计
传统的鲸鱼优化算法应用于连续领域,设计离散的鲸鱼优化算法可以更好地解决仓库作业问题,算法流程如图7所示。
2.3.1 编码
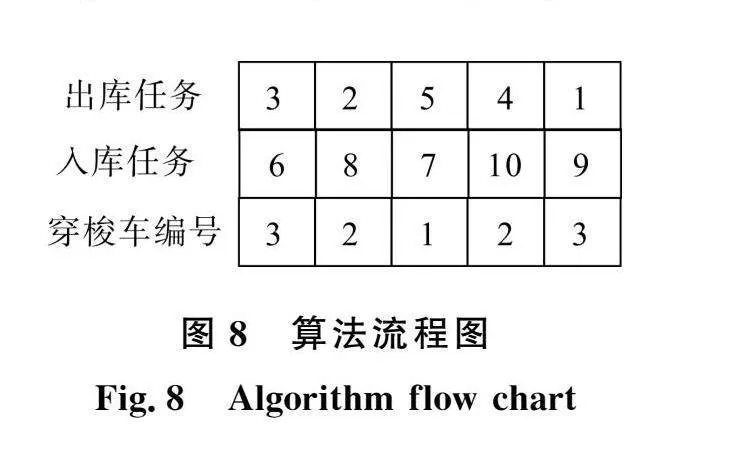
本文采用三层整数编码,第一层编码代表出库任务序列,第二层编码代表入库任务序列,第三层编码代表四向穿梭车编号。本文主要研究复合作业路径优化,因此出库作业数量和入库作业数量相同,假设总任务数量为N,出库任务序列为1~N/2,入库任务序列为1+N/2~N。在图8中,总任务数量为10,四向穿梭车数量为3。1~5为出库任务,6~10为入库任务,1号四向穿梭车执行任务序列为5→7,2号四向穿梭车执行任务序列为2→8→4→10,3号四向穿梭车执行任务序列为3→6→1→9。在分配过程中,会发现穿梭车任务数量不全相等,任务较多的穿梭车会以一定概率将任务分配给任务最少的穿梭车,尽量达到任务均衡。
2.3.2 适应度计算
本文以完成所有出入库任务的最终时间为优化目标,则适应度函数可表示为
fitness=T=minWmax
其中,T为完成所有出入库订单的最终时间;Wmax为所有四向穿梭车完成一批出入库任务的最大时间。
2.3.3 初始种群生成
初始种群50%采用随机生成的方式,剩下50%采用策略生成方式,策略为:当四向穿梭车依次完成任务时,依次选择层数最近的任务,缩短路程时间,即在完成入库任务时,下一个出库任务优先选择层数最近且距离最近的任务。这样有助于算法收敛,策略引导寻找更优的适应度值。
2.3.4 迭代过程
1)当p<0.5,A≥1时,为寻找猎物阶段,当前出库任务和入库任务随机向种群中某个体的出库任务与入库任务靠近,且出库任务和入库任务分开操作,互不干扰。四向穿梭车依概率产生变异,优先分配给任务数量最少的穿梭车。
2)当p<0.5,A<1时,为包围猎物阶段,当前出库任务和入库任务向种群中最优个体的出库任务与入库任务靠近,且出库任务和入库任务分开操作。四向穿梭车依概率产生变异,优先分配给任务数量最少的穿梭车。
3)当p≥0.5时,为泡泡网捕食阶段,计算当前个体和最优个体之间的差异度,以差异度为参考确定邻域搜索次数。采用多种邻域操作选择并多次扰动,且出库任务和入库任务分开操作。
2.3.5 种群多样性
在算法过程中,为避免算法因种群相似陷入局部最优,每完成一次迭代,以适应度值为依据从小到大排列,将最后N/2个体舍弃,采用随机方式生成N/2新种群,完成种群的更新,保持种群的多样性。
2.3.6 停止条件
当算法运行次数达到最大迭代次数时,算法停止。
3 算例分析
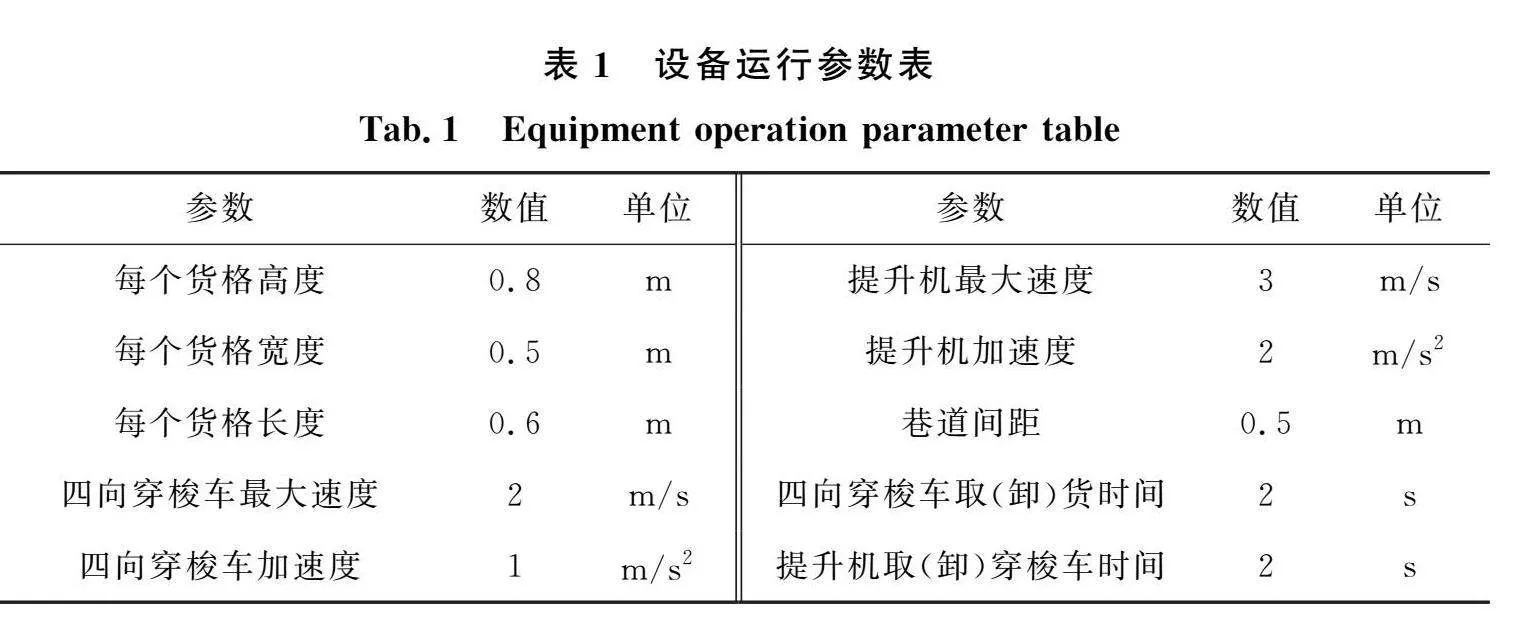
以某物流配送仓储运行情况为例,验证算法的有效性。该仓储系统配备有1个高层密集货架、2个提升机、4个四向穿梭车和2个拣选站。货架层数为20,横排货架数为21,纵深货格数为50,设备运行参数如表1所示。
在计算时间时,考虑四向穿梭车和提升机的变加(减)速运动,忽略四向穿梭车转弯时的速度变化。vo代表速度,xo代表行使路程,ao代表加速度,to代表时间。在完成一次任务时穿梭车和提升机达到各自最大速度,匀速运行后再减速至0,其时间计算可表示为to=xovo+voao;在完成一次任务时穿梭车和提升机未达到各自最大速度,未进入匀速阶段减速至0,其时间计算可表示为to=4xo/ao。运用求时间的两个公式,可以求出完成整个任务作业的时间。
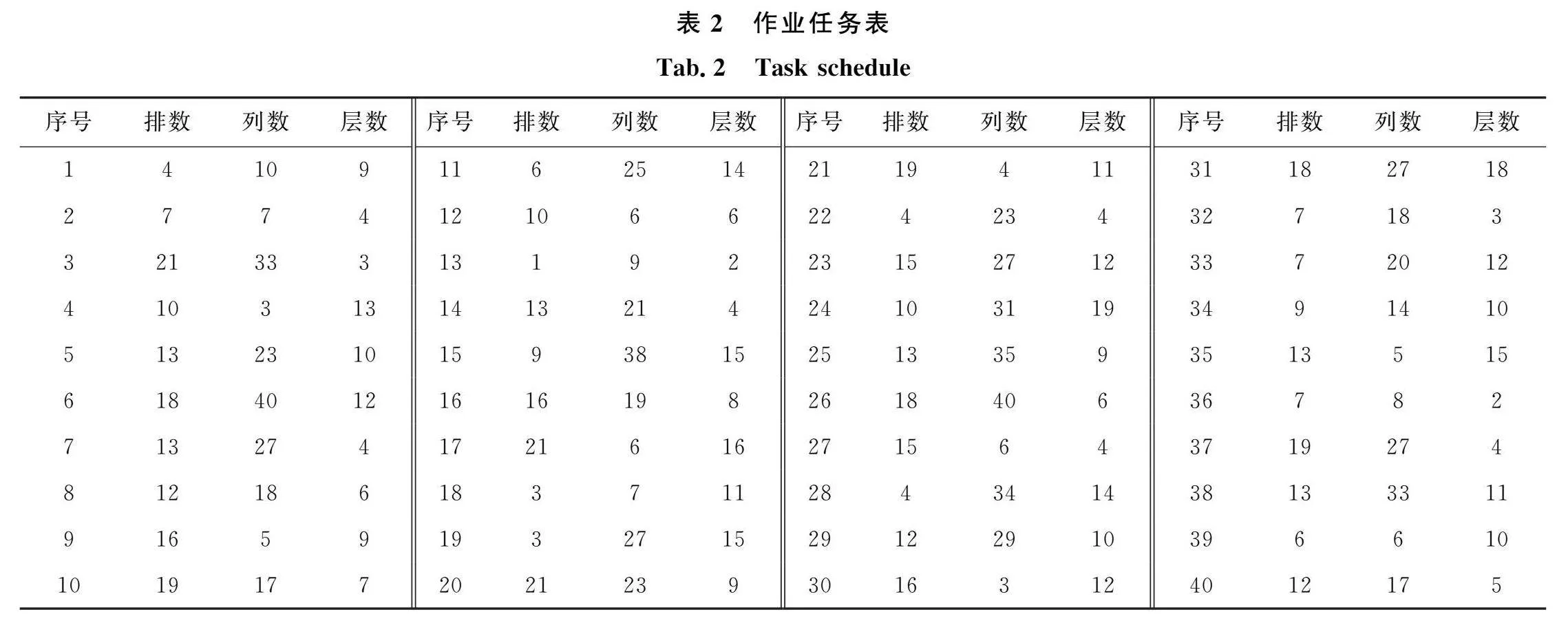
选取某次实际的任务订单作为测试数据,数据如表2所示,用以求解模型最小完成时间并验证改进鲸鱼优化算法的有效性。在表2中,有40个出入库任务,其中1~20为出库任务,21~40为入库任务,合并成复合任务共20个。
随机分配任务:穿梭车1任务为:14→33→12→28→3→32→7→26→8→37;穿梭车2任务为:1→29→20→39→19→34→18→30→13→24;穿梭车3任务为:16→35→4→36→10→23→2→22→5→31;穿梭车4任务为:11→40→15→38→6→25→9→27→17→21,最终完成时间为326.9 s。用改进的鲸鱼优化算法进行计算,拣选时间有效减少,优化后的方案如下,穿梭车1任务为:13→33→1→21→18→23→6→35→15→38;穿梭车2任务为:19→39→16→34→4→28→11→22→2→29;穿梭车3任务为:5→36→10→37→14→25→20→40→8→24;穿梭车4任务为:9→31→17→26→12→32→3→27→7→30,最终完成时间为258.4 s。与随机方案相比,时间缩短了68.5 s,优化效率提升了20.9%。
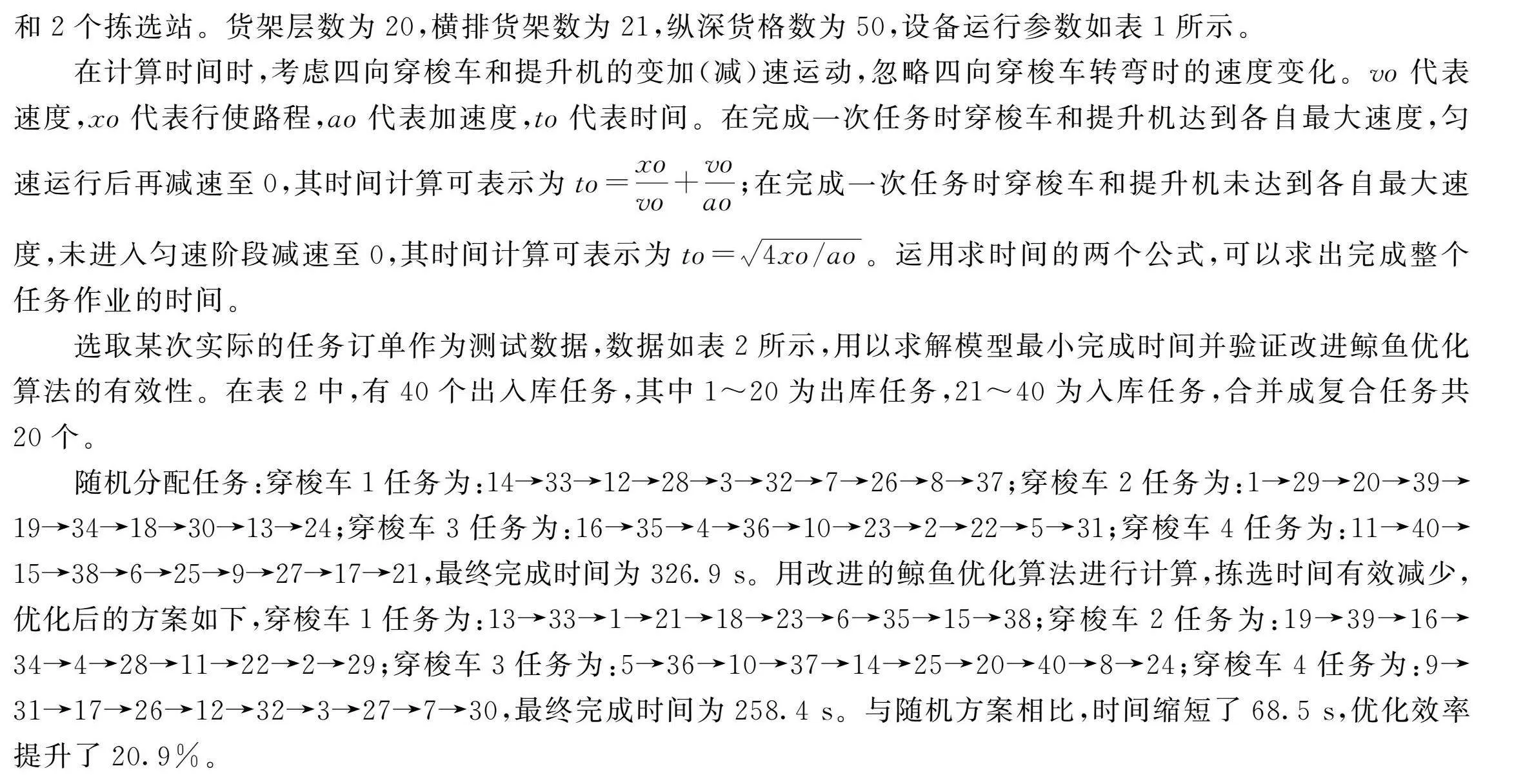
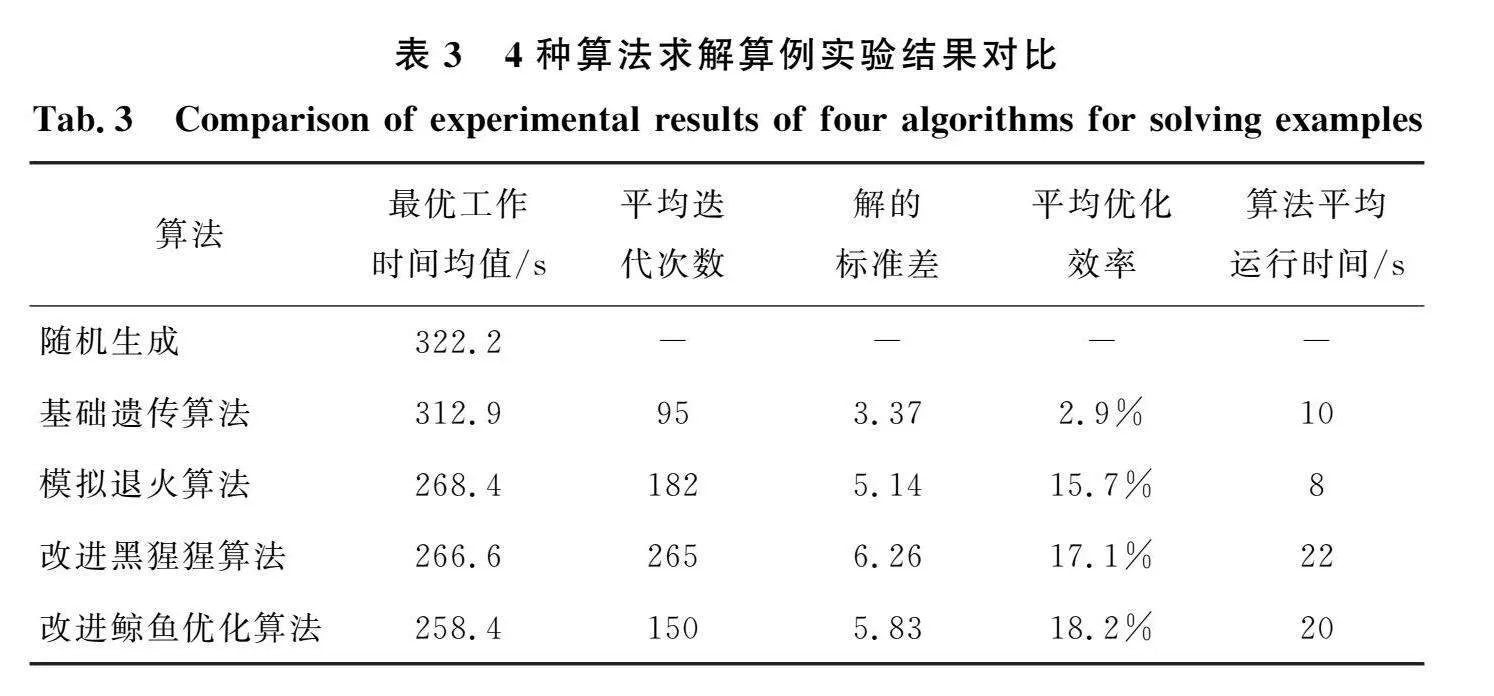
为了验证算法的有效性,将本文算法与基础遗传算法、改进模拟退火算法和改进黑猩猩优化算法进行对比实验。遗传算法采用概率化的寻优方法,能自动获取和指导优化的搜索空间,自适应地调整搜索方向,具有更好的全局寻优能力;模拟退火算法的优点在于它能够跳出局部最优解,找到全局最优解。相比一般的贪心算法,模拟退火算法不会受限于局部最优解,而是具有一定的概率接受更优解;黑猩猩优化算法是根据黑猩猩群体围捕猎物时个体的能力不同和社会激励行为而提出的元启发式算法,黑猩猩优化算法与鲸鱼算法都是群体智能算法,搜索机制不同,黑猩猩算法将狩猎过程分为探索阶段和开发阶段,可以有效提高算法的搜索速度和精度,在解决优化问题时具有一定的竞争力。
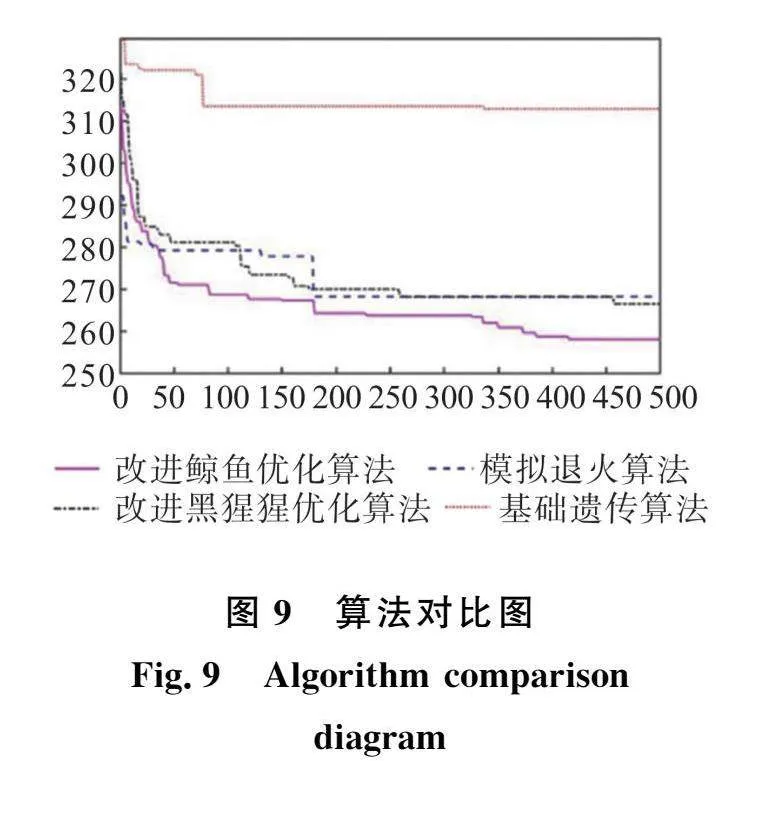
比较实验中,算法参数设置如下:遗传算法采用种群规模为50,迭代次数为500,交叉概率为0.8,变异概率为0.1;模拟退火算法采用外层最大迭代次数为500,内层循环次数为15,初始温度为1 000,冷却因子为0.99;改进黑猩猩优化算法通过一定的概率改变任务序列,比如插入,两交换,逆序和改变四向穿梭车编号等,概率为0.8。这4种算法全部采用三层编码,在此基础上对这4种算法进行分析比较,每个算法进行20次运算,取最优值。利用MATLAB R2018b实现提出的改进鲸鱼优化算法,并在Intel(R) Core(TM) i512500H CPU @ 2.50GHz处理器及RAM 8.00GB电脑上运行,结果见表3,分析对比见图9。
由表3和图9可以看出,4种算法都可以改善适应度值,但改善的效果各不相同。对比这4种算法,可以发现:在求解算例中,模拟退火算法的收敛速度很快,但是后期的寻优能力较弱。它在处理复杂模型时,虽然能很快收敛,但很难跳出局部最优解,这意味着将需要更多的时间来寻找最优解;基础遗传算法在求解此问题上收敛速度和求解质量都不算太好,遗传算法易陷入局部最优,导致求解精度差;改进黑猩猩优化算法在局部搜索能力上表现较好,但最后求解质量欠佳;本文提出的改进鲸鱼优化算法前期收敛速度较快,较其他3种算法,全局搜索能力表现较好,在求解此模型上有很好的效果。
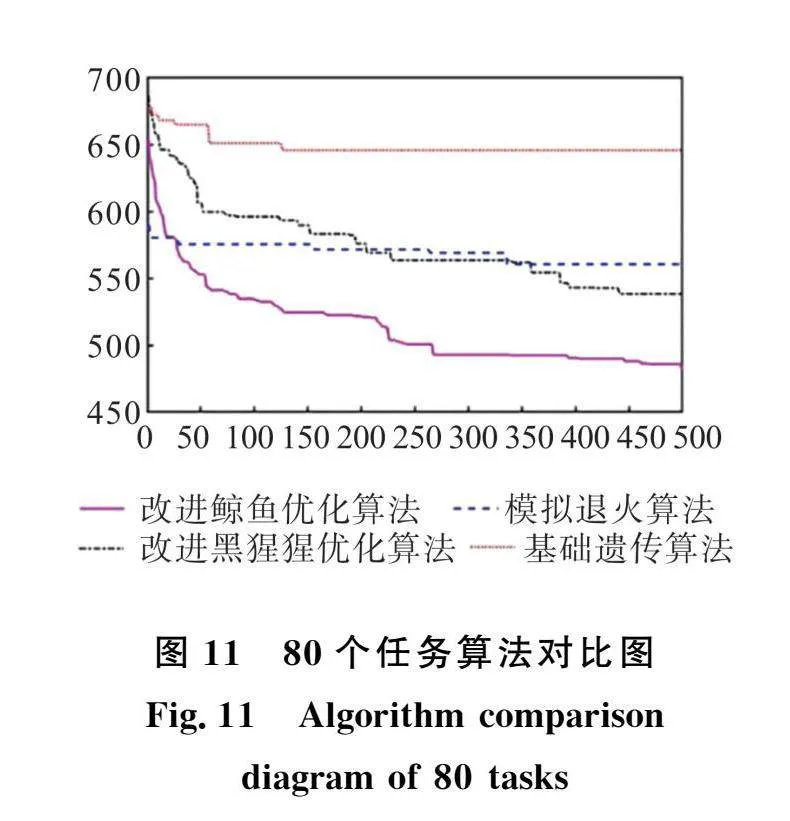
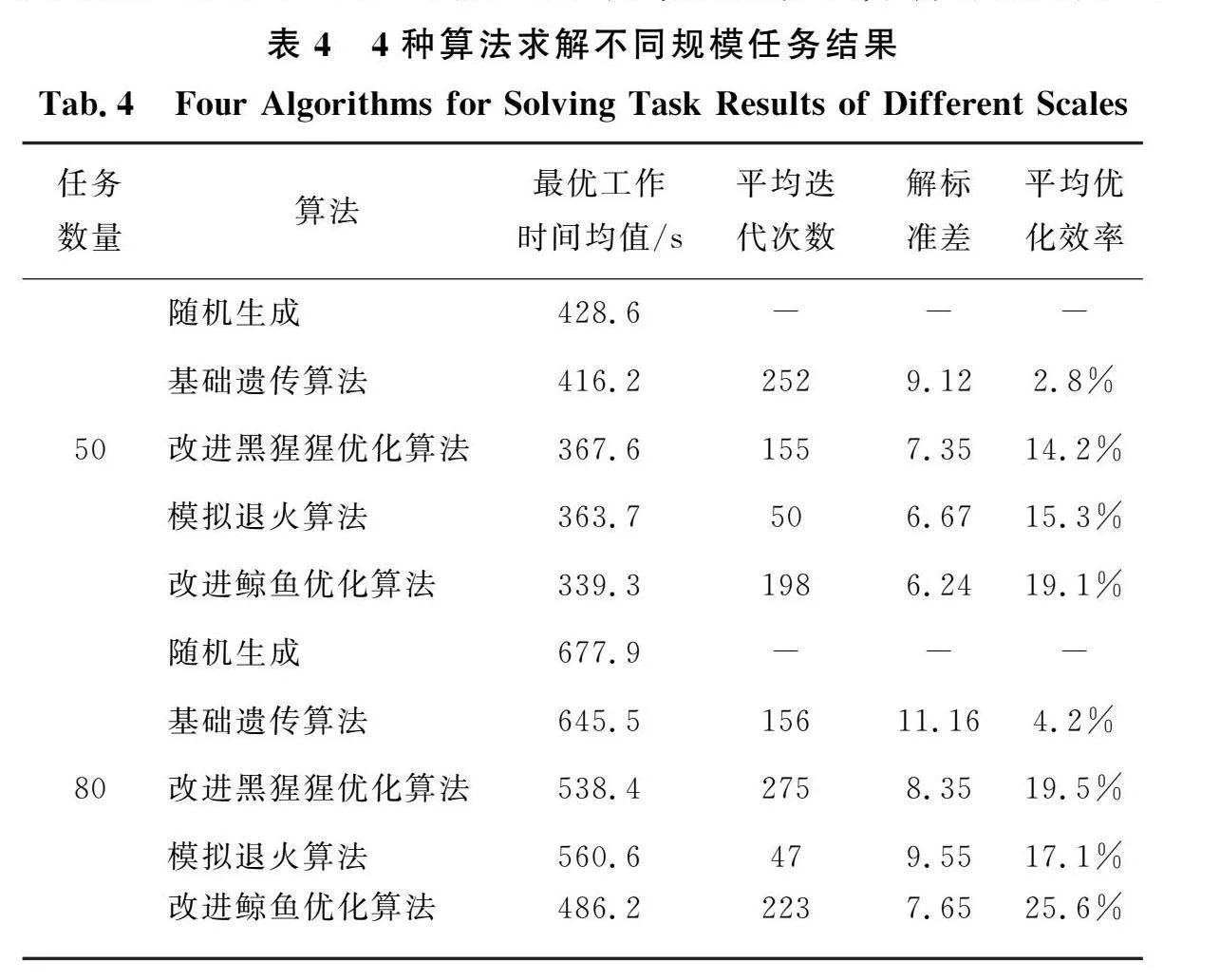
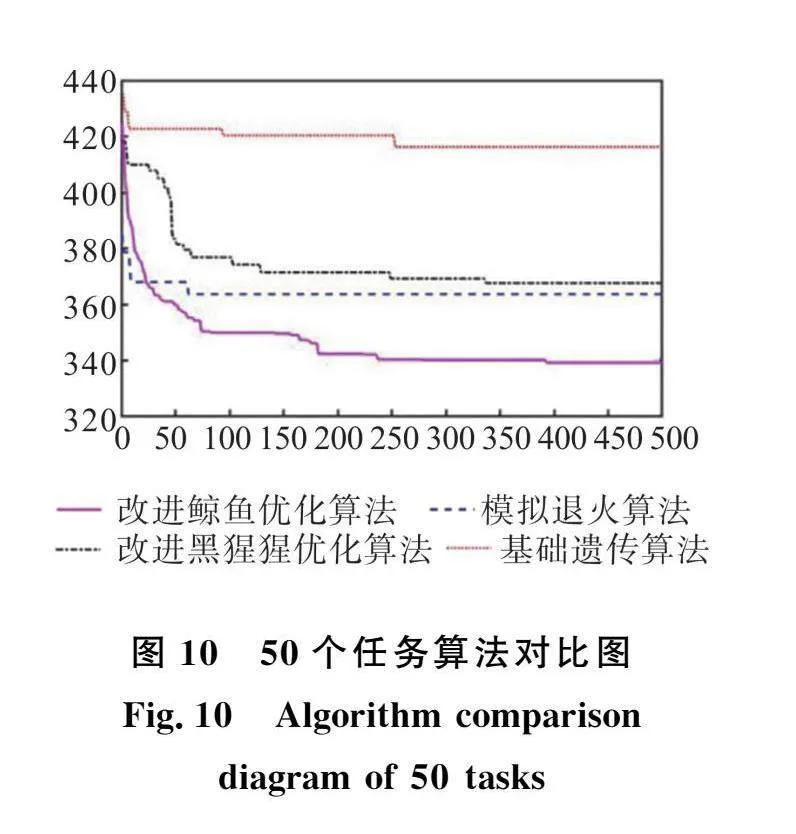
在不同的规模下,改进鲸鱼优化算法较其他3种算法均表现出更好的求解质量。为了进一步验证算法的有效性,增加出入库任务数量,求解结果如表4所示。
根据表4中的数据,可以对比分析50和80两种规模作业在4种算法下的求解情况。随着任务量的增加,各个算法都可以优化工作时间,并且其求解均值都小于随机生成的均值。仔细对比这4种算法,可以发现改进鲸鱼优化算法求解质量较好,其求解最优值和优化效率都好于其余3种算法,算法对比见图10和图11。这说明在处理任务量较大的问题时,改进鲸鱼优化算法具有更好的性能。基础遗传算法容易陷入局部最优,收敛容易早熟,缺少探索新解的能力。模拟退火算法在前期可以很快收敛到最优解,但后期求解效果不佳。改进黑猩猩算法收敛速度较模拟退火算法慢,但求解质量要好于模拟退火算法。因此,改进鲸鱼优化算法在求解四向穿梭车跨层仓库作业问题上具有很好的性能。
4 结语
跨层四向穿梭车仓库复合作业路径规划涉及多方面要素,未来可以进一步研究的方向有:1)跨层仓库作业效率受制于四向穿梭车和提升机的数量搭配,增加提升机的数量会提高拣选效率,但如果提升机数量过多,又会导致能耗的增加,设备数量配置问题可作为下一步研究的方向。2)随着四向穿梭车数量的增多,可深入研究四向穿梭车无死锁控制。3)本文未考虑四向穿梭车在运行过程中发生故障问题后的任务重新分配问题,以及充电的问题,这些可作为继续研究的内容。
参考文献:
[1]宋佼蓉. 四向穿梭车式密集仓储系统作业流程优化研究[D].北京:北京邮电大学, 2021.
SONG J R. Research on operation process optimization of four-way shuttle intensive storage system[D]. Beijing: Beijing University of Posts and Telecommunications, 2021.
[2]占翔南,徐立云,凌旭峰,等. 多深度四向穿梭车仓储系统调度优化[J].计算机集成制造系统, 2022, 28(8): 24962507.
ZHAN X N, XU L Y, LING X F, et al. Scheduling optimization of multi-depth four-way shuttle truck storage system[J]. Computer Integrated Manufacturing Systems, 2022, 28(8): 24962507.
[3]张经天,马莹,翁迅,等. 四向穿梭车系统的提升机调度优化[J].北京邮电大学学报, 2022, 45(1): 1925,81.
ZHANG J T, MA Y, WENG X, et al. Elevator scheduling optimization of four-way shuttle system[J]. Journal of Beijing University of Posts and Telecommunications, 2022, 45(1): 1925,81.
[4]何昕杰,周少武,张红强,等. 基于改进遗传算法的四向穿梭车系统订单排序优化[J].系统仿真学报,2021,33(9): 21662179.
HE X J, ZHOU S W, ZHANG H Q, et al. Order ordering optimization of four-way shuttle system based on improved genetic algorithm[J]. Journal of System Simulation, 202 33(9): 21662179.
[5]段绿辉. 四向穿梭车系统配置优化与调度算法研究[D].长春:吉林大学, 2020.
DUAN L H. Research on configuration optimization and scheduling algorithm of four-way shuttle system[D]. Changchun: Jilin University, 2020.
[6]刘瑞萍. 四向穿梭车仓储系统调度优化研究[D].长春:吉林大学, 2020.
LIU R P. Study on scheduling optimization of four-way shuttle storage system[D]. Changchun: Jilin University, 2020.
[7]MAO J, CHENG J, LI X, et al. Modelling analysis of a four-way shuttle-based storage and retrieval system on the basis of operation strategy[J]. Applied Sciences, 2023, 13(5): 3306.
[8]MAO J, CHENG J, LI X, et al. Research on scheduling optimization of four-way shuttle-based storage and retrieval systems[J]. Scientific Reports, 2023, 13(1): 3999.
[9]王姗姗,张纪会. 穿梭车仓储系统复合作业路径优化[J].复杂系统与复杂性科学, 202 18(1): 6372.
WANG S S, ZHANG J H. Shuttle storage system complex operation path optimization[J]. Complex Systems and Complexity Science, 202 18(1): 6372.
[10] 汤洪涛,程晓雅,李修琳,等. 跨层跨巷道穿梭车仓储系统复合作业路径优化[J].计算机集成制造系统, 2022, 28(6): 18881902.
TANG H T, CHENG X Y, LI X L, et al. Optimization of complex operation path of cross-floor cross-roadway shuttle storage system[J]. Computer Integrated Manufacturing Systems, 2022, 28(6): 18881902.
[11] 于巧玉,吴耀华,王艳艳. 跨层穿梭车双提升机系统料箱拣选任务调度[J].计算机工程与应用, 2020, 56(20): 270278.
YU Q Y, WU Y H, WANG Y Y. Task scheduling of hopper picking in cross-floor shuttle double hoist system[J]. Computer Engineering and Applications, 2020, 56(20): 270278.
[12] 陈寿伍. 跨层穿梭车仓储系统资源配置与任务调度研究[D].杭州:浙江工业大学, 2020.
CHEN S W. Research on resource allocation and task scheduling of cross-layer shuttle storage system[D]. Hangzhou: Zhejiang University of Technology, 2020.
[13] 鲁建厦,陈寿伍,易文超,等. 跨层穿梭车仓储系统复合作业路径规划[J].计算机集成制造系统, 202 27(6): 17991808.
LU J S, CHEN S W, YI W C, et al. Cross-layer shuttle storage system complex operation path planning[J]. Computer Integrated Manufacturing Systems, 202 27(6): 17991808.
[14] 杨玮,吴莹莹,王婷. 子母式穿梭车仓储系统配置优化问题研究[J].计算机工程与应用, 202 57(4): 258265.
YANG W, WU Y Y, WANG T. Research on optimization of the configuration of the shuttle-carrier storage system [J]. Computer Engineering and Applications, 202 57(4): 258265.
[15] WANG Y, ZHANG R, LIU H, et al. Task scheduling model of double-deep multi-tier shuttle system[J]. Processes, 2019, 7(9): 604.
[16] ZHU H, WANG M, GAO H. Modeling and optimizing based on OTCPN in multi-tier shuttle warehousing system[J]. Mathematical Problems in Engineering, 2022(1): 9773212.
[17] MIRJALILI S, LEWIS A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 5167.
(责任编辑 耿金花)
