
双机频率域交替闪烁的协同相参信号处理方法
2024-11-07 00:00:00张亚男王娜董乔龙张劲东
航空科学技术 2024年6期
摘 要:多机协同探测从空域方面扩展了雷达辐射波形的复杂度,频率域交替闪烁为空战场强对抗复杂电磁环境下空、时、频域高度隐蔽提供了多维手段。针对双机编队频率域交替闪烁探测模式下距离—多普勒二维相参处理,本文提出了一种交替方向乘子法(ADMM)框架下嵌套多点欠定系统聚焦求解(MFOCUSS)的相位误差估计和二维场景重构方法。仿真结果表明,该方法能够精确估计双机雷达系统频率源引入的固有相位误差,同时对大间隔的双机频率能够进行有效地相参积累和二维场景重构。通过研究,本文设计一种新的双机协同探测工作模式,解决了双机频率域闪烁探测模式下的相位校正和场景重建问题,为复杂电磁环境下协同探测提供了信号处理方法。
关键词:双机协同探测; 相参积累; 稀疏重构; 系统相位误差; 交替方向乘子法
中图分类号:TN958 文献标识码:A DOI:10.19452/j.issn1007-5453.2024.06.011
基金项目: 航空科学基金(20172052015)
随着现代机载侦察接收机无源探测性能的飞速提升,其无源探测距离已远大于作战飞机雷达威力。这意味着作战飞机在雷达正常探测发现目标之前,辐射信号已被截获、分选、识别、定位、跟踪,并进一步导致作战飞机被物理攻击、毁灭[1]。机载雷达低截获探测是未来空战场作战飞机先敌发现、先敌攻击必不可少的先决条件,更是作战飞机生存能力、突防能力与作战效能得以发挥的重要保障[1-2]。双机协同探测使得机载雷达低截获探测能力提升具备了更多可能性[3-4]。双机有源无源协同探测,结合了无源探测距离远、有源探测精度高的优势,与单机相比减少了辐射时间与辐射能量,能实现高隐蔽性探测[5]。对于多机参与的任务,协同飞行探测具有重要意义[6]。双机远发近收探测,后置发射机间歇辐射、前置接收机静默接收,接收机不会被无源探测,且相比单机,发射机平台探测相同距离情况下,降低了所需辐射功率,可提升己方作战飞机的生存能力[7]。
交替闪烁是一种新型的协同探测,各机帧间交替辐射雷达信号,大大减少了连续辐射时间,增加了信号的复杂度,从而降低我方工作状态被识别的概率[1],破坏敌方无源定位及跟踪。本文在双机交替闪烁的协同探测模式基础上,结合机载雷达大带宽频率捷变的能力,提出了一种双机频率域交替闪烁的新探测模式,通过双机交替发射任意间隔频率、同脉冲重复间隔短帧波形,自发自收,短帧波形之间时间连续,接收的多个短帧回波数据构成完整的长帧数据,进行相参积累处理。与双机帧间闪烁探测相比,双机帧内闪烁探测波形在空间、时间、频率维度形成高度分散特性,x8tL+QqvOxFk/boxxxsubEaEhUoxD3E03LnJpSVO7fo=进一步增加了信号复杂度与工作状态的识别难度,进而提升机载平台的低截获性能。
在双机帧内频率域闪烁探测模式下,相参积累时间内,因双基发射信号频率任意、系统之间存在初相误差,导致双机雷达回波信号的多普勒频率、常相位存在差异,相参积累处理较困难。针对实际系统存在的频率偏差、随机相位误差和回波信号的相参积累问题,已有公开文献开展相关技术研究。Huang Tianyao等[8]针对正交匹配追踪(OMP)算法中离散网格点设置导致的目标真实参数网格点失配问题,提出一种自动进行网格格点大小校正的匹配追踪算法。丁丽[9]针对多输入多输出(MIMO)雷达存在固有的相位和载频偏差导致处理相参性不佳,提出了基于期望最大化准则和有界扰动的两种稀疏成像算法。同时针对处理过程中划分网格的失配,提出了先连续参数估计再稀疏成像的方法,同时将Band-exclusion技术引入MIMO稀疏成像。张轶芃等[10]研究了一种用于跳频和重频抖动的稀疏处理方法,提出了基于嵌套多点欠定系统聚焦求解算法,用于运动目标距离-多普勒二维联合处理。该方法根据跳频和重频抖动信号参数变化特点构造冗余字典使得目标回波信号能量得到积累,有效地获取目标的距离速度参数,同时提高了信噪比。丁逊等[11]针对系统相位误差下雷达目标捷变频回波信号相参积累模型,提出了一种基于交替方向乘子法的系统相位误差估计与目标场景稀疏重构联合处理算法,实现了系统相位误差和目标参数的联合精确估计。杨镭[12] 提出基于连续稀疏重构的成像方法,用于解决稀疏重构算法在雷达成像中的基失配问题。
本文设计的双机频率域闪烁探测模式,在空、时、频多维度形成了高度离散性,增加了波形复杂度,但也同时引入了双机平台发射信号的带宽合成与频率域系统相位误差问题,使得系统在信号域进行距离- 多普勒处理时无法进行有效的相参积累。针对上述问题,本文提出通过对目标回波多普勒频移、常相位进行相位补偿,得到目标初始恢复场景;利用稀疏重构算法来求解目标参数,在采用多点欠定系统聚焦求解(MFOCUSS)算法对目标稀疏重构的同时,考虑采用交替方向优化的思路,用交替方向乘子法(ADMM)算法[13]对系统相位误差矩阵进行优化,实现对二者的联合优化求解。
1 双机频率域交替闪烁协同探测下的回波信号建模
1.1 双机频率域交替闪烁工作模式设计
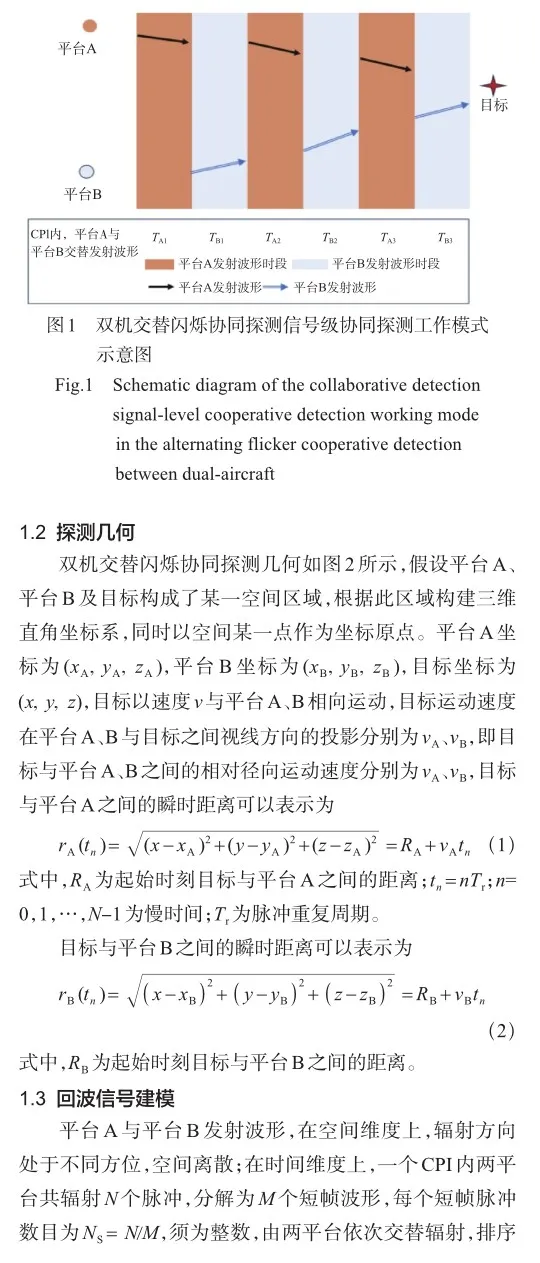
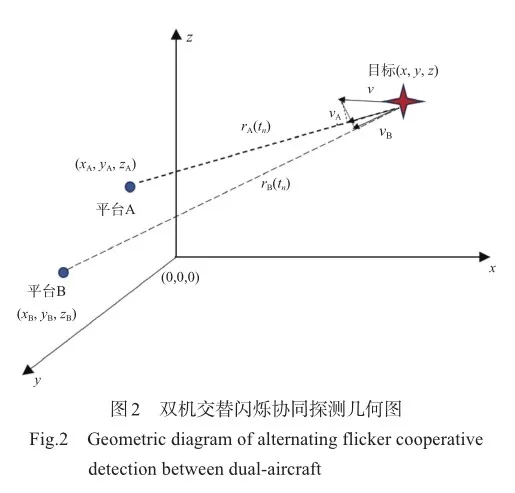
多机协同探测从空域维度扩展了雷达辐射波形的复杂度,为空战场强对抗复杂电磁环境下隐蔽探测提供了更多可能性。本文设计了双机自发自收信号级协同探测工作模式,如图1所示, TA1为平台A发送第一个波形时段,TB1为平台B发送第一个波形时段。红方平台A与平台B编队保持一定基线,对目标实施双机交替闪烁协同低截获探测。在相参积累时间(CPI)内,红方平台A与平台B波束指向蓝方目标,交替发射频率正交、同脉冲重复间隔短帧波形,自发自收,短帧波形之间时间连续。红方平台A与平台B接收的多个短帧回波数据构成完整的长帧数据,进行相参积累处理。红方协同探测发射波形在空间、时间、频率维度上离散,增加了雷达波形的变化维度,在不降低探测性能的前提下,提升雷达波形的隐蔽探测能力。
在双机交替闪烁协同探测中,由平台A和平台B探测目标的回波相位中包含了分别与目标距离和速度相关的相位。目标距离引起的相位与目标雷达散射截面积结合形成复幅度;目标速度引起的相位则与发射时间相关,形成了离散间断的导向矢量形式,需要进行补偿才能对目标进行相参处理和速度测量。
此外,由于平台A和平台B到同一目标的距离差异,需要对回波包络对齐;同时消除由于距离引起的相位,才能使非同频协同探测的回波信号具备相参处理可行性。
2 频率域交替辐射下的协同相参信号处理方法
2.1 预处理
通常由地面雷达提供目标距离信息,经计算,可知目标到平台A、平台B的距离差,采用插值平移等方法能使得平台A、平台B回波包络对齐。



通过迭代,求得信号在距离—速度联合域中的稀疏系数解,目标距离和速度参数的估计值即可视为稀疏解中绝对值较大的值所在位置。
2.3 ADMM框架下嵌套MFOCUSS的相位误差估计和二维场景重构算法
如果要在目标稀疏重构的同时,将不同频点引入的初始相位信息补偿,则可以考虑采用交替方向优化的思路,通过对矢量x和系统相位误差矩阵E的交替优化,实现对二者的联合优化求解。
交替方向乘子法(ADMM)是一种在统计学习、机器学习等领域有着广泛应用的算法。由于处理速度快、收敛性能好,ADMM算法被用于求解具有可分离的凸优化问题。ADMM算法通过将原优化问题分化两个子问题交替求解,缩小了问题的规模。


基于MFOCUSS与ADMM的相位误差估计和稀疏场景重构改进算法的基本思路是将系统相位误差当成辅助变量进行求解。首先利用MFOCUSS算法进行稀疏矢量x的求解;然后利用ADMM算法交替迭代求解系统相位误差矢量 e以及稀疏矢量x,考虑到各个变量之间的独立性,将相位误差e分解为单个元素进行求解,更新e;用噪声门限ε作为约束条件,对辅助变量β进行更新;最后对各个变量反复交替迭代,直到满足算法收敛条件,将矢量x和e的解输出。算法流程如图3所示。
3 计算机仿真与性能分析
为验证本文所提算法的有效性,设计仿真试验进行验证,进行二对二对抗场景下的数值仿真,场景参数设置见表1,其中两个目标紧密编队飞行,载机运动作匀速直线运动,目标作拐弯切向运动,双机基线为20km。场景如图4所示,雷达信号仿真参数设置见表2。

下面首先固定相位误差矩阵E,采用MFOCUSS算法仿真优化稀疏矢量x,并给出不同参数情况下的结果对比图,以此分析MFOCUSS算法的重构性能,在处理过程中均对幅度进行归一化处理。
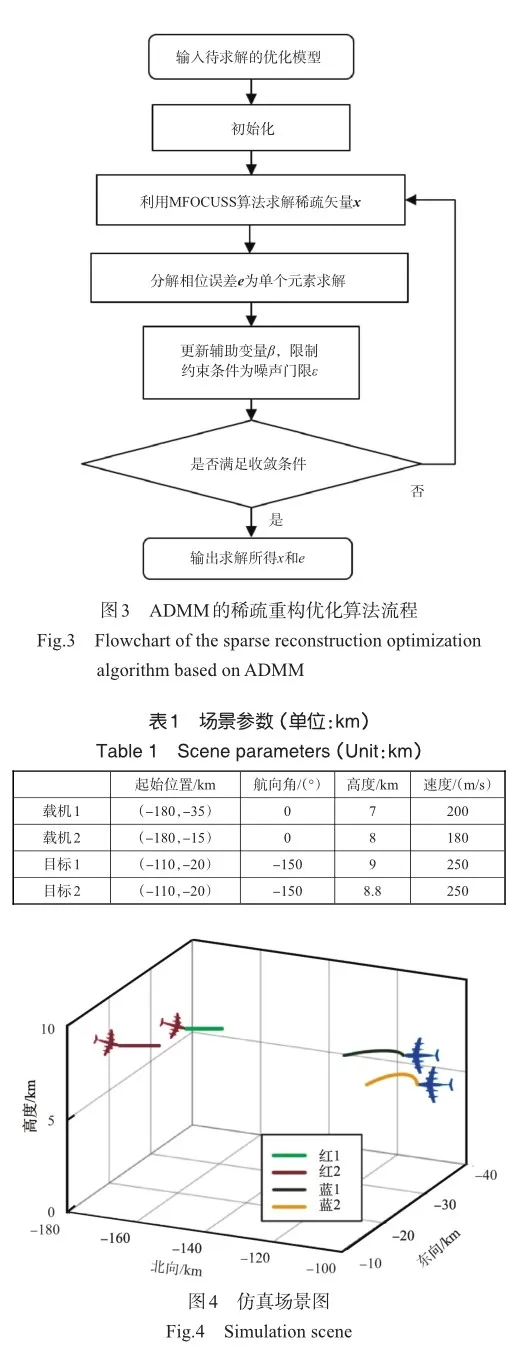
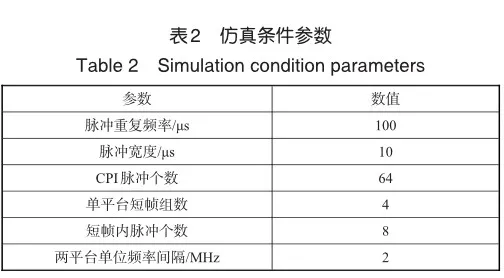
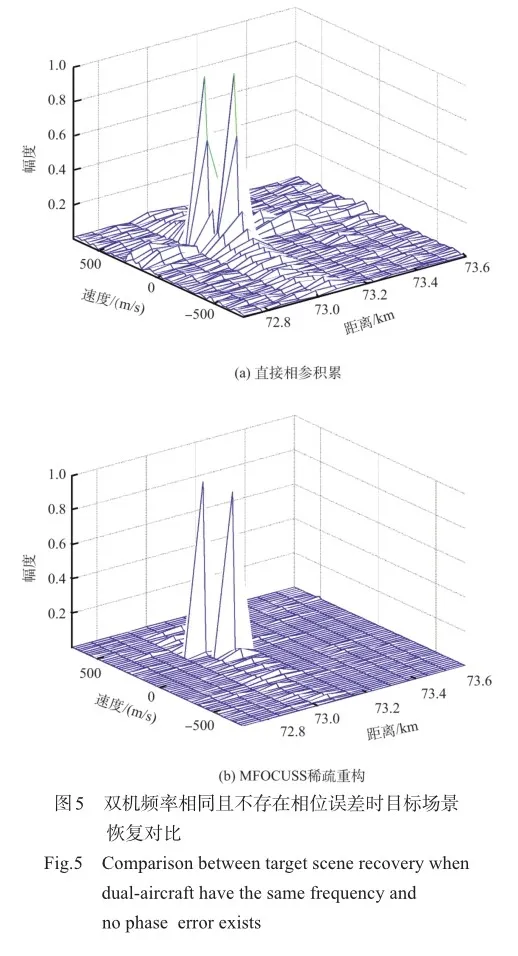
图5为理想情况下,双机频率相同且不存在相位误差时直接相参积累和基于MFOCUSS稀疏重构的目标场景恢复对比图。图中两种方法均精确恢复出目标位置,图5(a)为直接相参积累的目标场景图,目标旁瓣较高,图5(b)为基于MFOCUSS稀疏重构的目标场景恢复图,对比图5(a)可知,目标旁瓣大大降低。可以看出基于MFOCUSS稀疏重构算法准确重构出了目标,并显著降低了目标的旁瓣。
图6给出了双机频率间隔参数a=1和双机系统相位误差Dφ=0°时,直接相参积累和基于本文所提方法的目标场景恢复对比图。图6(a)为直接相参积累的目标场景图,图6(b)为基于MFOCUSS稀疏重构的目标场景恢复图。对比可知经过MFOCUSS稀疏重构之后的目标旁瓣下降了近40dB,可以看出本文所提方法实现了目标距离-速度的精确估计,同时提高了目标幅度的重构性能。由于利用目标场景的稀疏特征,从而显著降低了恢复场景的旁瓣水平。
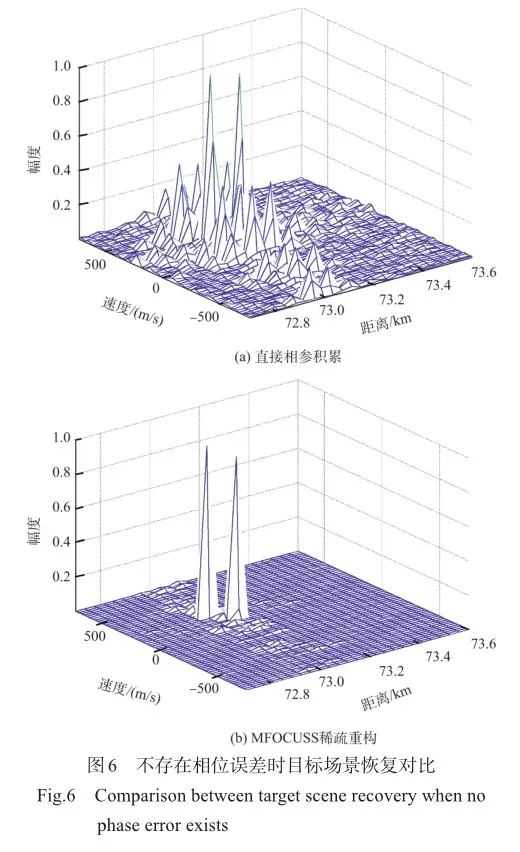
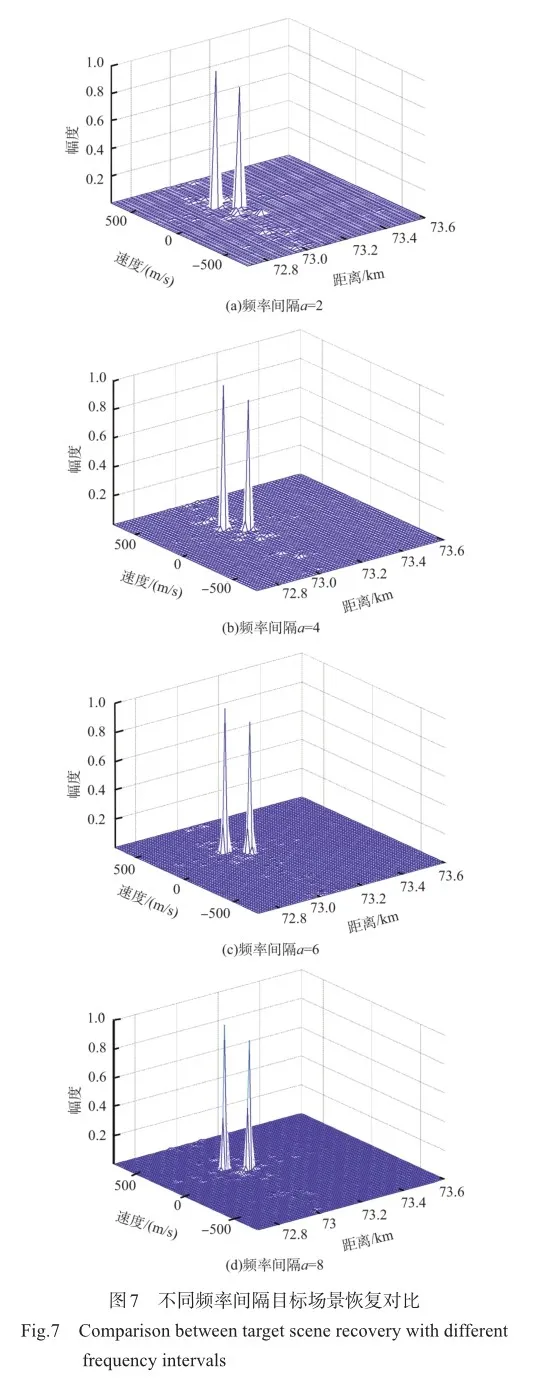
图7给出了双机系统相位误差Dφ=0°,频率间隔不同时基于MFOCUSS稀疏重构的目标场景恢复对比图。图7分别为相位误差均为0、频率间隔从2依次递增到8时的目标场景恢复图。可以看出当频率间隔增加到4时,稀疏重构之后的目标场景恢复图分辨率逐渐增加。
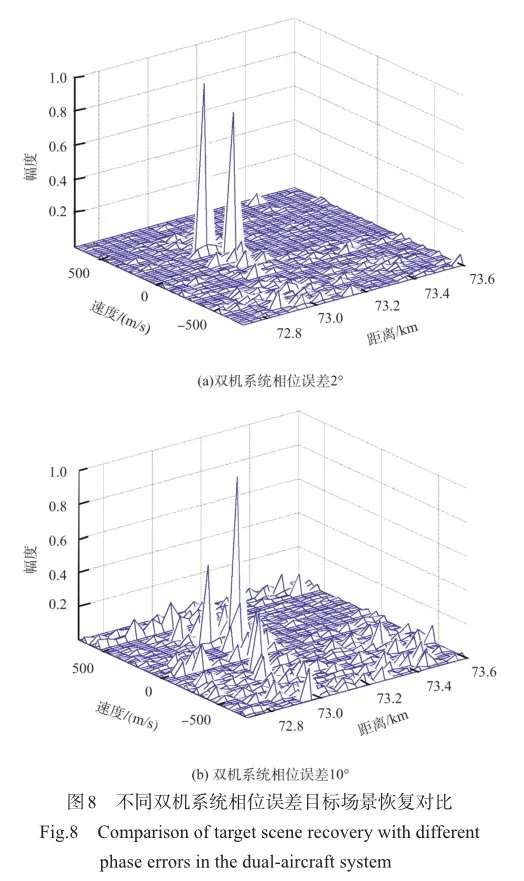
图8给出了固定双机频率间隔a=1、系统相位误差分别为2°和10°时基于MFOCUSS稀疏重构的目标场景恢复对比图。图8(a)系统相位误差为2°,对比不存在系统相位误差时,旁瓣明显增加;图8(b)系统相位误差为10°,其中一个目标甚至被旁瓣掩盖。可以看出当有系统相位误差时,目标场景恢复效果大大降低,旁瓣幅度大大增加,甚至影响目标幅度大小;当系统相位误差越来越大时目标旁瓣也越来越高,甚至掩盖真目标。因此系统相位误差对目标场景恢复的影响必须考虑在内。
为了减少系统相位误差对目标探测的影响,下面考虑采用交替方向优化的思路,通过对矢量x和系统相位误差矩阵E的交替优化,实现对二者的联合优化求解。前面采用了MFOCUSS算法固定相位误差矩阵E的情况优化x,接着采用基于ADMM的稀疏约束最优化算法固定矢量x的情况下优化相位误差矩阵E,然后如此往复迭代。
表3给出基于MFOCUSS和ADMM稀疏重构优化算法在不同信噪比下的系统相位误差估计误差。由表3可以看出,该算法在不同系统相位误差下,在信噪比一定时,误差估计精度随系统相位误差的变化而波动很小。随着信噪比的提高,系统相位误差估计误差不断降低,仿真结果表明系统相位误差的估计精度不断提高,在信噪比为20dB时,估计误差在3°以内。
4 结论

本文针对双机交替闪烁协同探测场景下多目标低截获探测,基于ADMM框架和MFOCUSS算法提出一种目标场景稀疏重构与系统相位误差校正联合处理算法,建立了目标稀疏解和系统相位误差相互独立的交替方向稀疏重构优化模型,用于解决双机雷达不同频点引入的初始相位误差导致回波信号相参积累性能下降问题。仿真结果表明该算法能够在距离和速度维同时有效估计和重构目标,且能够自动估计系统相位误差并进行补偿。所设计算法在双机雷达频率间隔较大的情况下,同样适用。
参考文献
[1]时晨光, 董璟, 周建江, 等. 飞行器射频隐身技术研究综述[J].系统工程与电子技术, 2021, 43(6): 1452-1467. Shi Chenguang, Dong Jing, Zhou Jianjiang, et al. Overview of aircraft radio frequency stealth technology[J]. Systems Engineering and Electronics, 2021, 43(6): 1452-1467. (in Chinese)
[2]邓景辉. 直升机技术发展与展望[J]. 航空科学技术,2021,32(1):10-16. Deng Jinghui. Development and prospects of helicopter technology [J]. Aeronautical Science & Technology, 2021,32(1):10-16.(in Chinese)
[3]何婷婷. 双机协同目标检测技术研究[D]. 成都:电子科技大学,2018. He Tingting. Research on bistatic airbone cooperation target detection[D]. Chengdu: University of Electronic Science and Technology of China, 2018. (in Chinese)
[4]赵洪宇,王卫红.基于距离向的双机雷达协同定位算法及影响因素研究[J].中国电子科学研究院学报, 2021, 16(7): 669-673. Zhao Hongyu, Wang Weihong. Research on positioning algo‐rithm and influencing factors of two-airborne radar co-location based on range direction[J]. Journal of China Academy of Elec‐tronics and Informa, 2021, 16(7): 669-673. (in Chinese)
[5]李其虎,王颖,商开拴. 多机有源无源协同探测及精度分析[J]. 弹箭与制导学报, 2020, 40(2): 43-46. Li Qihu, Wang Ying, Shang Kaishuan. Multiple aircrafts active cooperate with passive detecting and accuracy analysis[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40(2): 43-46. (in Chinese)
[6]陈宇恒,陈进朝,陈雪聪. 基于改进贪心算法的无人机集群协同任务分配[J]. 航空科学技术,2022,33(4):13-18. Chen Yuheng, Chen Jinchao, Chen Xuecong. Cooperative task allocation of UAV cluster based on improved greedy algorithm[J]. Aeronautical Science & Technology, 2022,33(4):13-18. (in Chinese)
[7]马艳艳,金宏斌,李浩, 等. 空基雷达组网收发分置协同探测编队构型优化[J]. 空军预警学院学报, 2019, 33(6): 436-440. Ma Yanyan, Jin Hongbin, Li Hao, et al. Configuration optimization of bistatic cooperative detection for air-based radar networking[J]. Journal of Air Force Early Warning Academy, 2019, 33(6): 436-440. (in Chinese)
[8]Huang Tianyao, Liu Yimin, Meng Huadong, et al. Adaptive matching pursuit with constrained total least squares[J]. EURASIP Journal on Advances in Signal Processing, 2012, 8(1): 76-88.
[9]丁丽. MIMO雷达稀疏成像的失配问题研究[D]. 合肥:中国科学技术大学, 2014. Ding Li. Research on observation matrix mismatch for MIMO radar sparse imaging[D]. Hefei:University of Science and Technology of China, 2014. (in Chinese)
[10]张轶芃,王峰. 跳频与重频二维抖动雷达信号的稀疏重构技术研究[J]. 中国电子科学研究院学报, 2021, 16(9): 891-899. Zhang Yipeng, Wang Feng. Research on sparse reconstruction of frequency hopping interval and repetition frequency twodimensional jitter radar signal[J]. Journal of China Academy of Electronics and Informa, 2021, 16(9): 891-899.(in Chinese)
[11]丁逊,张劲东,王娜, 等. 基于相参积累的捷变频雷系统相位误差估计与稀疏场景重构算法[J]. 系统工程与电子技术,2021, 43(6): 1515-1523. Ding Xun, Zhang Jindong, Wang Na, et al. System phase error estimation and sparse scene reconstruction algorithm of frequency agile radar based on coherent accumulation[J]. Systems Engineering and Electronics, 2021, 43(6): 1515-1523.(in Chinese)
[12]杨镭. 压缩感知雷达成像中的模型失配问题研究[D]. 长沙:国防科学技术大学,2016. Yang Lei. Research on model mismatch in compressed sensing radar imaging [D]. Changsha: University of Defense Science and technology, 2016. (in Chinese)
[13]Stephen B, Neal P, Eric C, et al. Distributed optimization and statistical learning via the alternating direction method of multipliers [J]. Foundations & Trends in Machine Learning, 2010, 3(1): 1-126.
Cooperation Coherent Signal Processing Method for Alternating Flicker in the Frequency Domain of Dual-aircraft
Zhang Yanan1, Wang Na2, Dong Qiaolong1, Zhang Jingdong1
1. Nanjing University of Aeronautics and Astronautics, Nanjing 211100, China
2. Wuhan Guide Infrared Co.,Ltd, Wuhan 430205, China
Abstract: Multi aircraft cooperative detection expands the complexity of radar radiation waveform from the aspect of airspace, and provides more possibilities for air combat field strength against covert detection in complex electromagnetic environment. In this paper, the working mode of two aircraft self transmit and receive signal level cooperative detection is designed, and a phase error estimation and sparse scene reconstruction method based on the combination of multiple underdetermined system solver (MFOCUSS) and alternating direction multiplier method(ADMM) is proposed. Simulation results show that this method can accurately estimate the system phase error and effectively coherently accumulate and reconstruct the scene of two frequencies at any interval. Through the research, a new dual-aircraft cooperative detection mode has been designed, which solves the phase correction and scene reconstruction issues in the dual-aircraft frequency flicker detection mode. This provides a signal processing method for cooperative detection under complex electromagnetic environments.
Key Words: dual-aircraft cooperation detection; coherent accumulation; sparse reconstruction; system phase error; alternating direction method of multipliers
