
基于三维外形投影的蒙皮阵面资源预分配
2024-11-07 00:00:00吴俊卿汪飞孙晓拂丁一韩清华
航空科学技术 2024年6期
摘 要:蒙皮阵面与飞行器表面共形,可以实现全向目标探测。针对飞行器蒙皮阵面成千上万的阵元,基于天线方向图综合和子阵分割的阵面资源分配算法无法实时应对复杂多变的战场环境。本文利用等效全向辐射功率衡量目标探测所需的射频资源,采用阵面投影的方法将复杂的三维蒙皮阵面投影到二维球面,并通过顺序特征匹配方法判断多目标探测时是否存在共用阵面的情形。本文以西科斯基S-97“突袭者”直升机为试验对象进行仿真试验,仿真试验表明所提方案能够有效分配蒙皮阵面资源探测侧面和仰视目标,判断阵面资源调度重叠情况,可应用于多目标探测时采取时分复用工作模式的蒙皮阵面孔径资源预分配。
关键词:蒙皮阵雷达; 阵面投影; 射频资源调度; 多目标探测; 三维建模
中图分类号:TN95 文献标识码:A DOI:10.19452/j.issn1007-5453.2024.06.009
基金项目: 航空科学基金(20200020052005);中国博士后科学基金(2023M731756);枣庄学院“青檀学者”人才项目
飞行器蒙皮阵雷达能够根据对战场态势的感知,灵活地选择工作阵元、工作方式与战术功能,选用天线子阵参与实现探测、侦察、干扰与通信等类型任务[1-2]。与传统相控阵雷达相比,蒙皮阵雷达拥有独特的全向探测与感知能力,是可能推动飞行器革命的重要技术之一[3-4]。
蒙皮阵雷达的阵元呈分布式多维排布,能实现360°的全空域辐射覆盖和接收,为平台电磁散射、隐身设计提供了全新的解决方案[5]。陈志新等[6]指出智能蒙皮的关键技术为可调电磁散射设计、可重构辐射控制、智能蒙皮散射和一体化集成。从硬件层面来看,蒙皮阵雷达已经出现众多解决方案。为了同时获得机械承载和电磁功能,Huff等[7]提出了结构功能一体化的嵌入式血管天线,将高度集成的天线嵌入机械结构中;Xu Fujun等[8]基于编织复合材料提出一种三维集成微带天线;Kim等[9]研究了多层复合天线结构的应用效果;Zhou Jinzhu等[10]设计了由封装层、控制和信号处理层以及射频层组成的有源蒙皮天线。
灵活性和稳定性是蒙皮阵列的重要优势,可以有选择性地控制阵列单元的工作状态,调度阵列资源的协调和重组。针对蒙皮阵面资源的调度,现有研究分为两大类:基于方向图综合的方法与基于子阵分割的方法。蒙皮阵方向图综合不同于常规天线阵列。龙伟军等[11]将方向图综合问题视为一个多参数、多约束条件下的多目标解优化问题,采取模糊变量描述电磁环境的模糊性和不确定性,并通过结合遗传算法和模糊随机模拟算法实现天线方向图综合;龚树凤等[12]基于可信性原理,将进行方向图综合的天线数视为模糊变量并利用模糊机会约束规划求解方向图,先后提出基于模糊相关机会规划的和基于模糊机会约束规划的方向图综合方法;夏欢等[13]提出一种改进的线性约束最小方差约束方向图综合算法,通过最小方差准则确定迭代的复加权矢量,并采取判定因子辅助调整收敛速度,增强了算法的适应性。
基于子阵分割的方法需要在满足探测需求的基础上,设计天线的时域/空域/频域辐射特性。由于蒙皮阵雷达的阵面单元呈分布式多维排布,从算法的角度来讲,可以将其视为组合优化问题,现有研究包含精确式算法和启发式算法两大类[14]。前者将待解决的问题转换成数学规划问题进行精确求解,如动态规划[15]、分支定界算法,后者是在可以接受的时间和空间内给出近优解,如模拟退火算法[16]、粒子群算法[17]。这种基于优化的阵元精确分配方法能充分利用阵面结构特性,但是分配过程迭代次数多、计算量大、耗时长,在实际复杂多变的多目标应用场景中很难做到实时分配。
本文基于西科斯基S-97“突袭者”直升机三维外形,利用飞行器蒙皮阵面与其投影面孔径的相关性,将飞行器投影到二维球面,提出多目标探测时基于飞行器三维外形投影的蒙皮阵面孔径资源预分配方法,并基于顺序特征匹配法判断多目标探测时是否存在共用阵面孔径,避免了复杂的天线方向图综合与子阵分割,可应用于多目标探测时的蒙皮阵面孔径资源预分配。
1 蒙皮阵面投影方法
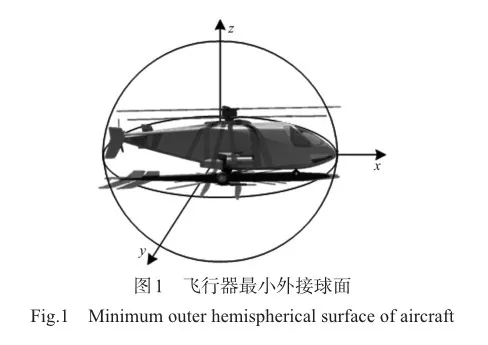
蒙皮阵雷达作为高价值作战装备,可以根据作战任务分配有限的雷达资源。由于实际飞行器阵面的结构不规则,现有的阵面资源分配方法很难做到实时、有效地分配。本文以西科斯基S-97“突袭者”直升机的最小外接球面作为研究对象,采用阵面投影的方法将复杂的三维蒙皮阵面投影到二维球面,简化阵面资源分配步骤。
最小外接半球面模型以西科斯基S-97“突袭者”高速直升机的径向长度(15.6m)为直径,以飞行器的中心点为球心。以球心作为原点建立直角坐标系,如图1所示。
真实直升机蒙皮表型面复杂,很难通过解析法求得隐匿量。因此,为了避免对复杂的曲面进行建模,采用基于立体光刻(STL)格式的通用切割建模方法,利用三角面片集合对飞行器蒙皮轮廓进行近似建模。STL格式存储三角面片的顶点坐标和面片法向矢量信息,具有极强的通用性,目前主流的三维设计软件都可以将模型转换为STL格式,如UG、CATIA等[18]。
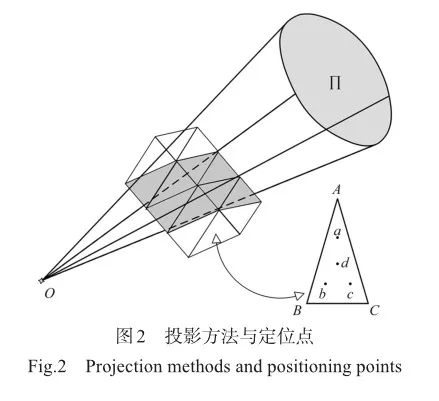
飞行器三维STL蒙皮阵面投影到二维最小外接球面的方法如图2所示。首先,根据目标先验信息估计探测所需的辐射资源量,并将其等效为最小外界球面上的球冠Π,球冠面积正比于探测当前目标所需辐射资源量。然后利用关键定位点集{abcd}判断当前三角形是否处于球冠Π与球心O组成的立体图形内,如果超过两个定位点在立体内部,则认为当前三角面片被投影到球冠α上面。其中,定位点d表示三角面片重心,{abc}为重心与顶点的中点。
2 多目标探测的资源分配
2.1 蒙皮阵有效投影阵面预估
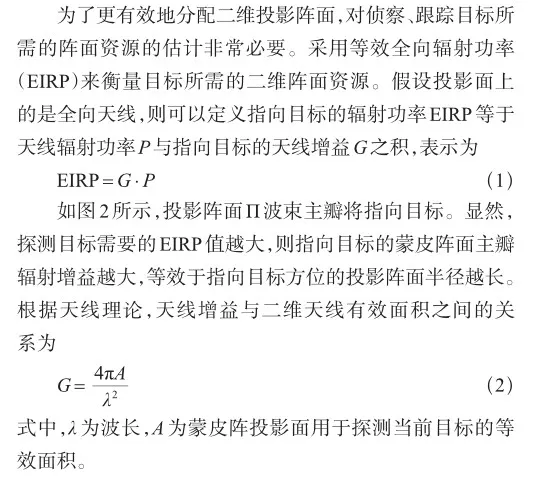
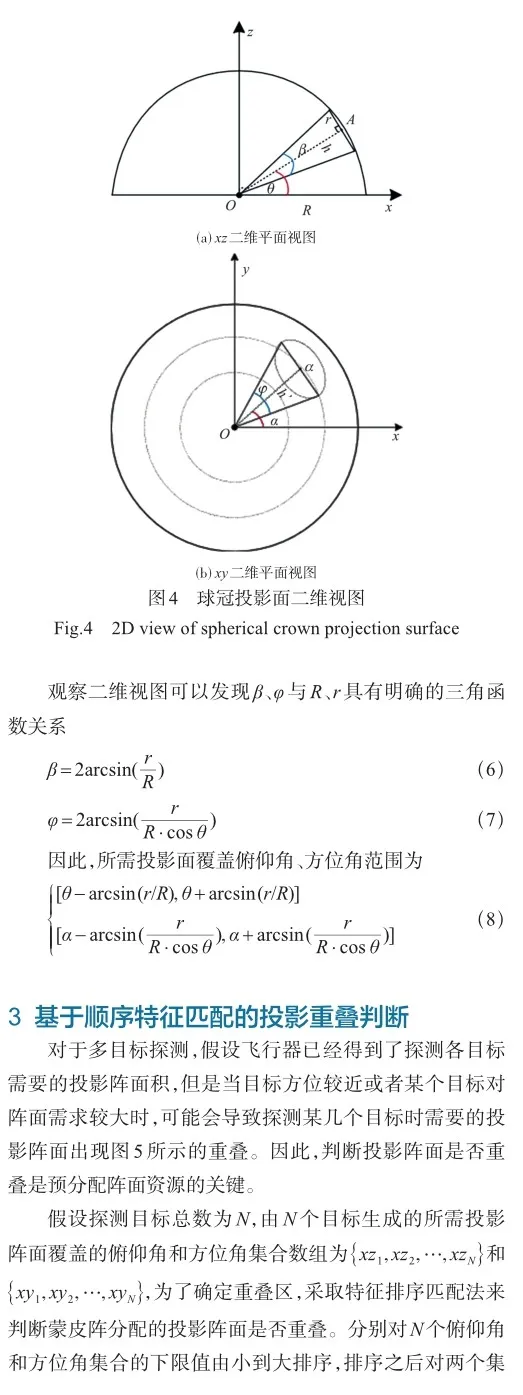
假设目标对应的俯仰角为θ,方位角为α;探测目标所需的目标方向投影面是以目标方向垂直投影点A为圆心,半径为r的圆;圆周线1和圆周线2分别与圆投影面相切于z轴上的最高点和最低点,两个相切点分别和圆心O相连构成两个线段的夹角β,代表投影面覆盖的俯仰角范围,则投影面覆盖俯仰角范围集合则为[θ-β/2θ+β/2];相交于半球顶点的圆周线3和圆周线4分别相切于圆投影面上的两点,两点连线过圆心A,长度为r且与xy轴平行;这两切点过A点相连的线段与圆周线3、4垂直投影到xy的二维平面形成了一个顶角为φ的等腰三角形,φ为所需投影面覆盖的方位角,投影面覆盖方位角范围集合则为[α-φ/2,α+φ/2]。为方便计算具体的β、φ值,将xyz三维视图转换到xz、xy二维视图如图4(a)和图4(b)所示。
4 实际蒙皮阵面映射方法
完成投影球冠计算和重叠判断之后,对实际三维蒙皮阵阵面进行划分。
(1)以真实飞行器为参照模型,按照一定的比例对飞行器机头、机身以及机翼位置进行分布式三维建模,通过三角形面片拼接的方式设计飞行器机体模型,对西科斯基S-97“突袭者”进行三维建模,以STL文件格式保存模型的数据。
(2)基于已经建立的适合蒙皮阵布局的外形数据结构,剖除螺旋桨、航炮、座舱、起落架、顶部等不便于布阵的区域,确定了阵元的可排布区域。
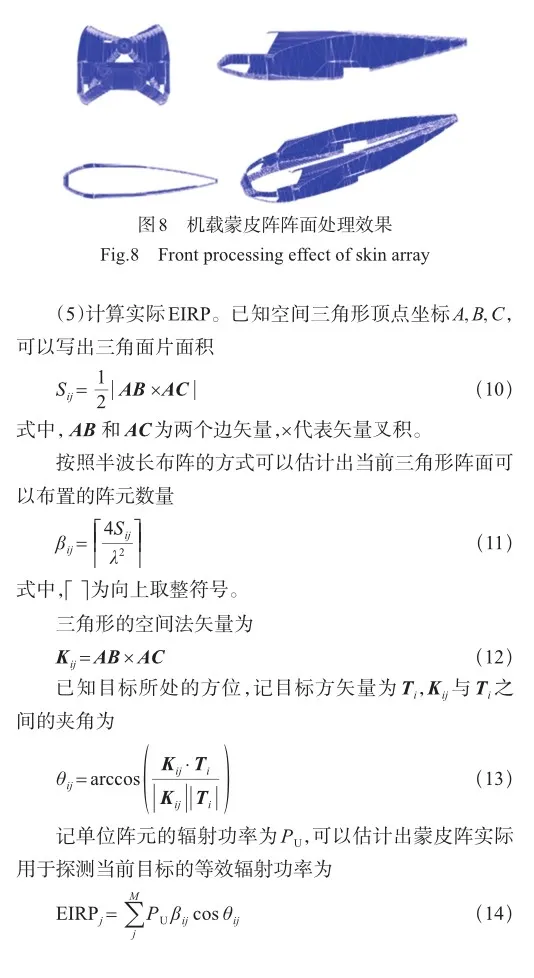
(3)利用某仿真软件作为开发平台,建立STL模型和仿真软件相关联的接口,读取STL文件各个三角形面片的数据,将布阵区域模型导入仿真软件,图8为西科斯基S-97“突袭者”三视图。
(4)依据三角形坐标及投影范围判断实际阵面资源分配结果。考虑到STL模型部分三角面片过大,在三角形顶点的基础上计算三角形关键定位点,若三角形存在两个关键定位点位于目标投影球冠的俯仰角、方位角范围,则认为当前三角面片被用于当前目标的探测。对于目标αii= 12…N, N为目标个数;用于探测当前目标的三角面片为Dij,j=12…M,M为三角面片个数。
5 仿真分析
为验证投影算法和重叠判断算法的有效性,本文设计仿真试验进行验证。
5.1 多目标探测场景仿真
假设跟踪目标数量N=4,每个目标的所需EIRP值,目标的俯仰角以及方位角已知,以飞行器正前方为基准,左侧方位角变化范围为-180°~0°,右侧方位角变化范围为0°~180°,俯仰角范围为-10°~10°。表1是4个目标场景下目标参数。
表2为4个目标场景下投影范围及蒙皮阵阵面实际EIRP计算结果。图9为机载蒙皮阵阵面分配结果。结合图9和表2可以看出,实际EIRP基本满足蒙皮阵阵面初分配任务。可以看出阵面的分配大小与EIRP值成正比,目标4具有最大的EIRP和投影面积,目标1具有最小的EIRP和投影面积;目标2和目标3所处方位角、俯仰角接近,出现了阵面投影的重合现象。
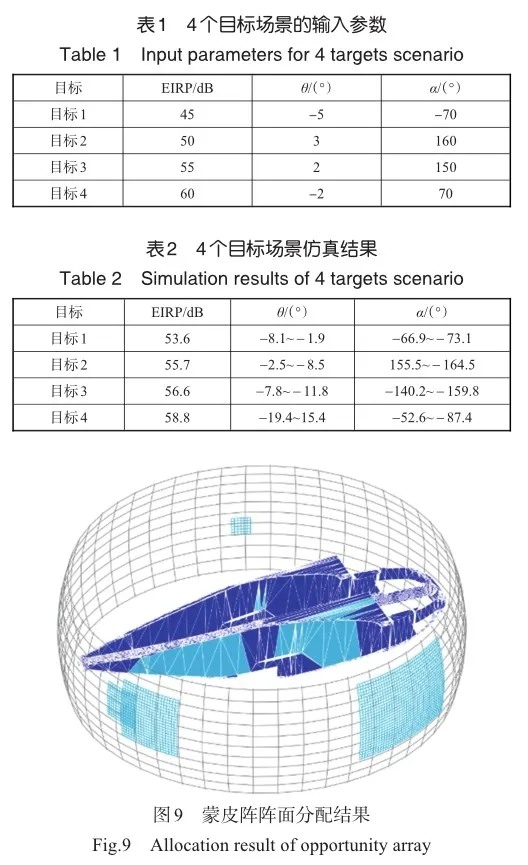
基于顺序特征匹配的投影重叠判断结果如式(15)所示,结果表示,目标1和目标4所需飞行器蒙皮投影面互不重叠,目标2和目标3存在重叠。对照投影分配图可以看出重叠判断算法输出了正确的结果。

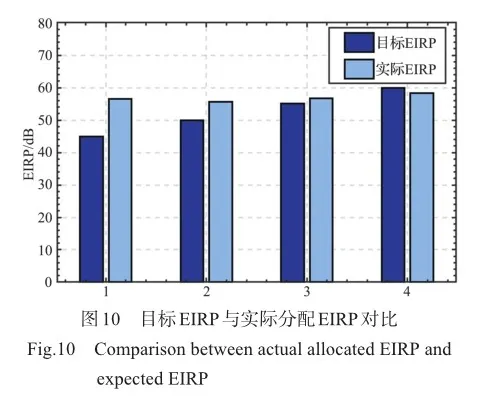
图10为两种场景下的实际分配阵面辐射资源与目标探测所需辐射资源的对比,实际分配的阵面辐射功率均大于目标探测所需功率。仿真说明通过本文提出的分配方法能有效地分配蒙皮阵阵面辐射资源,实现多目标场景下的跟踪。
5.2 影响因素分析
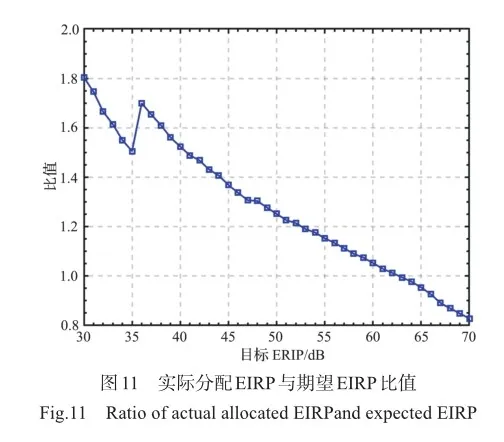
研究目标所需EIRP大小对分配结果的影响。考虑到飞行器侧面阵面射频辐射资源丰富,选取飞行器侧面作为目标来向。场景俯仰角设置为0,方位角设置90°,目标所需EIRP的区间为[30dB,70dB]。
图11为实际分配给当前目标的EIRP与目标所需EIRP的比值关系,随着目标所需EIRP的增加,比值呈现下降趋势。在目标所需EIRP较小的情况下,目标投影球冠大小较小,实际阵面模型三角形片较大,能充分满足目标探测需求;随着所需EIRP的增大,比值开始小于1,表明由于飞行器阵面资源有限,通过投影方法求得的阵面无法满足目标探测需求。
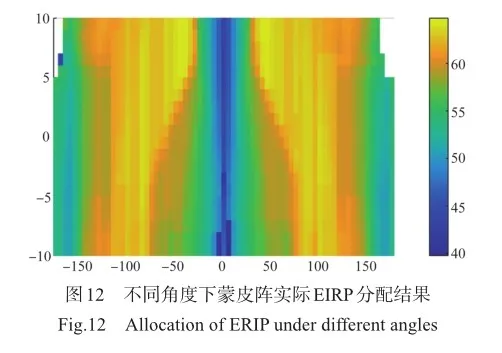
为进一步分析不同方位角、俯仰角对分配结果的影响,将目标的俯仰角变化范围设置为[-10°10°],方位角变化范围设置为[1°360°]。考虑到部分区域阵面资源匮乏,目标的 EIRP不宜设置过大,选择50dB,该值在飞行器侧面实际分配功率满足目标探测需求。
图12为目标位于飞行器不同方位角、俯仰角的实际EIRP分配结果。结果表明对于EIRP为50dB的目标探测需求,飞行器能有效探测位于方位角-150°~-30°和30°~150°的目标,能更好地探测0°~10°的仰视目标。
6 结束语
飞行器蒙皮阵面具有成千上万的阵元,基于天线方向图综合和子阵分割的阵面资源分配算法无法实时应对复杂多变的战场环境。为避免一般阵面孔径资源分配的复杂化子阵分割过程。本文采用阵面投影的方法将复杂的三维蒙皮阵面投影到二维球面,并通过顺序特征匹配方法判断多目标探测时是否存在共用阵面的情形。通过设计单目标、多目标、多角度的仿真场景,外接球面投影方法能够快速计算出共用的阵面孔径,验证了分配方法的有效性,可应用于多目标探测时采取时分复用工作模式的蒙皮阵面孔径资源预分配。
参考文献
[1]Han Qinghua, Pan Minghai, Gong Shufeng, et al. Resource man‐agement of opportunistic digital array radar antenna aperture for pattern synthesis[J]. IET Radar, Sonar & Navigation, 2017, 11(5): 829-837.
[2]Han Qinghua, Pan Minghai, Long Weijun, et al. Joint adaptive sampling interval and power allocation for maneuvering target tracking in a multiple opportunistic array radar system[J]. Sensors, 2020, 20(4): 981.
[3]Long Weijun, Ben De, Bakhshi Asim D, et al. Pattern synthesis optimization of 3-D ODAR based on improved GA using LSFE method[J]. Journal of Harbin Institute of Technology, 2011, 18(1): 96-100.
[4]陈龙, 宋庆国, 廖孟豪. 国防领域航空颠覆性技术识别[J]. 航空科学技术, 2022, 33(5): 37-43. Chen Long, Song Qingguo, Liao Menghao. Identification of disruptive aviation technologies in the field of national defense[J]. Aerospace Science & Technology, 2022, 33(5): 37-43.(in Chinese)
[5]何庆强, 王秉中, 何海丹. 新兴智能蒙皮天线技术[J]. 微波学报, 2014, 30(S1): 287-290. He Qingqiang, Wang Bingzhong, He Haidan. Emerging intelligent skin antenna technology[J]. Journal of Microwave Science, 2014, 30 (S1): 287-290.(in Chinese)
[6]陈志新, 王秀芝, 王瑞. 智能隐身蒙皮研究进展及其关键技术分析[J]. 战术导弹技术, 2017(5): 6-11. Chen Zhixin, Wang Xiuzhi, Wang Rui. Research progress and key technology analysis of intelligent stealth skin [J]. Tactical Missile Technology, 2017 (5): 6-11.(in Chinese)
[7]Huff G H, Pan Hong, Darren J H, et al. A Physically reconfigu‐rable structurally embedded vascular antenna[J]. IEEE Transac‐tions on Antennas and Propagation, 2017, 65(5): 2282-2288.
[8]Xu Fujun, Yao Lan, Wang Xin, et al. Effect of conductive yarn crimp in radiation patch on electromagnetic performance of 3D integrated microstrip antenna[J]. Composites Part B: Engineer‐ing, 2012, 43(2): 465-470.
[9]Kim D, You Chisang, Hwang W. Effect of adhesive bonds on electrical performance in multi-layer composite antenna[J]. Composite Structures, 2009, 90(4): 413-417.
[10]Zhou Jinzhu, Huang Jin, He Qingqang, et al. Development and coupling analysis of active skin antenna[J]. Smart Materials and Structures, 2016, 26(2): 025011.
[11]龙伟军, 龚树凤, 韩清华, 等. 基于不确定相关机会规划的机会阵方向图综合[J]. 系统工程与电子技术, 2017, 39(1): 49-56. Long Weijun, Gong Shufeng, Han Qinghua, et al. The synthe‐sis of opportunity array direction maps based on uncertain relat‐ed opportunity planning [J]. Systems Engineering and Electron‐ic Technology, 2017, 39 (1): 49-56.(in Chinese)
[12]龚树凤, 贲德, 潘明海, 等. 基于模糊机会约束规划的机会阵雷达方向图综合[J]. 航空学报, 2014, 35(9): 2615-2623. Gong Shufeng, Ben De, Pan Minghai, et al. Fuzzy chance constrained programming based pattern synthesis of opportunity array radar [J]. Acta Aeronautica et Astronautica Sinica, 2014, 35 (9): 2615-2623.(in Chinese)
[13]夏欢, 张兴敢, 柏业超. 一种改进的共形阵方向图综合方法[J]. 数据采集与处理, 2016, 31(4): 761-766. Xia Huan, Zhang Xinggan, Bai Yechao. An improved conformal array pattern synthesis method [J]. Data Collection and Processing, 2016, 31(4): 761-766.(in Chinese)
[14]陈宇恒, 陈进朝, 陈雪聪. 基于改进贪心算法的无人机集群协同任务分配[J]. 航空科学技术, 2022, 33(4): 13-18. Chen Yuheng, Chen Jinchao, Chen Xuecong. Collaborative task allocation of unmanned aerial vehicle clusters based on im‐proved greedy algorithm [J] Aeronautical Science & Technolo‐gy, 2022, 33 (4): 13-18.(in Chinese)
[15]李海, 郭水林, 周晔. 融合动态风险图和改进A*算法的动态改航规划[J]. 航空科学技术, 2021, 32(5): 61-71. Li Hai, Guo Shuilin, Zhou Ye. Dynamic diversion planning combining dynamic risk map and improved A* algorithm [J]. Aeronautical Science & Technology, 2021, 32 (5): 61-71.(in Chinese)
[16]胡月, 丁萌, 姜欣言, 等. 一种面向有人/无人直升机协同打击的地面目标任务分配方法[J]. 航空科学技术, 2019, 30(10): 64-69. Hu Yue, Ding Meng, Jiang Xinyan, et al. A ground target task al‐location method for coordinated strikes by manned/unmanned helicopters [J]. Aeronautical Science & Technology, 2019, 30(10): 64-69.(in Chinese)
[17]李海林, 周建江, 谭静, 等. 基于MOPSO算法的卫星共形阵列天线多波束形成[J]. 数据采集与处理, 2014, 29(3): 415-420. Li Hailin, Zhou Jianjiang, Tan Jing, et al. Multi beam forming of satellite conformal array antennas based on MOPSO algo‐rithm [J]. Data Collection and Processing, 2014, 29(3): 415-420.(in Chinese)
[18]黄丽. 基于STL模型的分层算法研究与软件实现[D]. 泰安:山东农业大学, 2016. Huang Li. Research and software implementation of layered al‐gorithm based on STL model [D].Tai’an: Shandong Agricultur‐al University, 2016.(in Chinese)
Pre-Allocation of Skin Array Resource Based on 3D Shape Projection
Wu Junqing1, Wang Fei1, Sun Xiaofu1, Ding Yi1, Han Qinghua2,3
1. College of Electronics and Information Engineering/College of Integrated Circuits, Nanjing University of Aeronautics and Astronautics, Nanjing 211106, China
2. Nanjing University of Information Science and Technology, Nanjing 210014, China
3. Zaozhuang University, Zaozhuang, 277160,China
Abstract: The conformal integration of aircraft skin array radar with the aircraft surface enables omnidirectional target detection. Due to the thousands of elements in the skin array, array allocation algorithms based on antenna pattern synthesis and subarray segmentation are unable to respond in real-time to the complex and dynamic battlefield environment. This paper employs the effective isotropic radiated power to quantify the required RF resources for target detection and utilizes the array surface projection method to project the intricate three-dimensional skin array onto a two-dimensional spherical surface. Additionally, whether there is array sharing during multi-target detection is judged thrENEW0WaFy3cLcZsfe4nXXQ==ough a sequential feature matching method. The experimental subject in this paper is the Sikorsky S-97 Raider helicopter. Simulation experiments indicate that the proposed approach can effectively allocate skin array resources for detecting side and elevated targets, and determine the existence of array overlap. The proposed approach can be applied to the pre-allocation of skin array aperture resources in a time-division multiplexing mode during multi-target detection.
Key Words: skin array radar; shape projection; array processing; multi target detection; 3D modeling
