主干线交通信号协调控制优化研究
2024-11-02 00:00:00宋静静
科技创新与应用 2024年31期

摘 要:为了探究车路协同技术在主干线交通信号协调过程中的具体方法与应用途径,该文从系统框架、协调措施、案例仿真方面,开展车路协同交通参数实时互通条件下的交通动态控制技术研究。研究认为,车路协同干线交通控制系统主要由智能路侧系统、智能车载系统、交通控制系统组成。针对车路协同干线交通协调措施,设计“车速诱导+信号控制”方案的流程与相位差模型,并以某省会城市5个相邻路口的交通数据为依托,建立VISSIM仿真模型。计算结果表明,相比仅采用车速诱导方案,“车速诱导+信号控制”方案能够有效提升路段通行效率,车均延误指标下降13.35%,平均停车次数指标下降37.62%。
关键词:车路协同;主干线;交通协调;VISSIM仿真模型;交通信号
中图分类号:U491 文献标志码:A 文章编号:2095-2945(2024)31-0153-04
Abstract: In order to explore the specific methods and application paths of vehicle-road collaboration technology in the process of traffic signal coordination on trunk lines, this paper carries out research on traffic dynamic control technology under the condition of real-time interoperability of vehicle-road collaboration traffic parameters from the aspects of system framework, coordination measures, and case simulation. Research believes that the vehicle-road coordinated trunk traffic control system mainly consists of intelligent roadside systems, intelligent vehicle-mounted systems, and traffic control systems. Aiming at the traffic coordination measures of vehicle-road coordinated trunk lines, the process and phase difference model of the "speed guidance + signal control" scheme are designed, and based on traffic data of five adjacent intersections in a provincial capital city, a VISSIM simulation model is established. The calculation results show that compared with using only the speed guidance scheme, the "speed guidance + signal control" scheme can effectively improve the traffic efficiency of road sections. The average vehicle delay index is reduced by 13.35%, and the average number of stops is reduced by 37.62%.
Keywords: vehicle-road coordination; trunk line; traffic coordination; VISSIM; traffic signal
传统干线交通协调主要依靠信号灯控制技术,但随着城市交通量日益增大、交叉口数量增多,已难以解决交通拥堵问题。现有的研究主要集中在车辆诱导、调整驾驶员行为、优化绿波速度模型等方面[1],该策略下的路口信号灯控制方案往往是固定的,不能根据车流实时变化,及时匹配绿波速度及信号灯相位,导致动态控制的效果不足。近年来随着车路协同技术的发展,车辆数据能够被道路检测装置迅速获取,若将相关数据与车速诱导策略、交通信号控制策略进行联动,将极大提升干线路交通协调控制效率[2-3]。因此本文结合车路协同技术,分析实时交通参数互联互通条件下的干线交通动态控制技术,并通过实际案例仿真评价交通优化效果。
1 车路协同下的干线交通控制系统框架分析
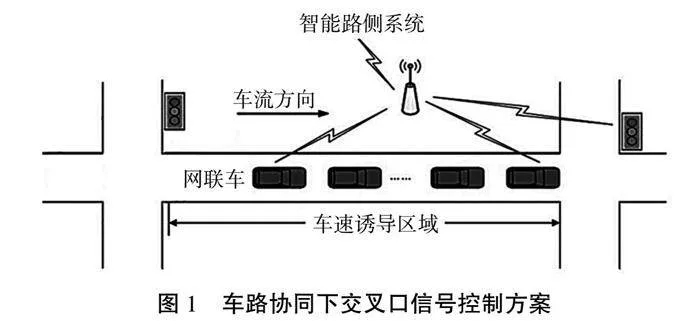
车路协同技术是将车辆与道路、城市设施、其他车辆间的数据信息,通过无线通信技术连接与共享,从而实现互联互通、协同控制,制定更为准确的速度诱导控制方案及交叉口信号控制方案,并通过车路通信功能,将优化信息及时传输至驾驶者,如图1所示。基于车路协同的干线协调系统主要包含智能车载系统、通信系统及路侧系统。通过车载系统、路侧系统实时收集车辆速度、位置、前进方向等信息,通过通信系统将信息及时传输至处理中心,为信号控制策略的制定提供支持。在车路协同技术下,车辆与道路通行实现数据双向联系,绿波宽度、车速定制引导等方案制定更具合理性。
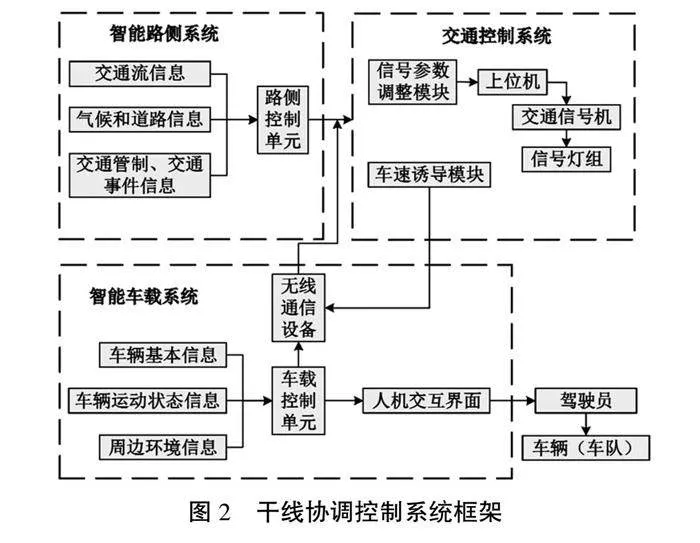
智能路侧系统利用基础设施中安置的传感器,将获取到的道路信息、交通量信息、气候信息等传输至路侧控制单元,路侧控制单元对信息整合后传输交通控制系统;同时智能车载系统将车辆基本信息、位置、速度、周边环境和车头时距等信息传输至交通控制系统;根据路侧系统及车载系统传输的数据,交通控制系统确定每辆车的诱导方案,并实时调整交叉口信号控制参数,通过车路通信技术将协调方案发布至驾驶员及路侧显示屏,即完成一轮车路协同下的交通协调。车辆协同技术下的干线交通协调系统框架如图2所示。
2 车路协同下的主干线交通协调措施
2.1 车速诱导
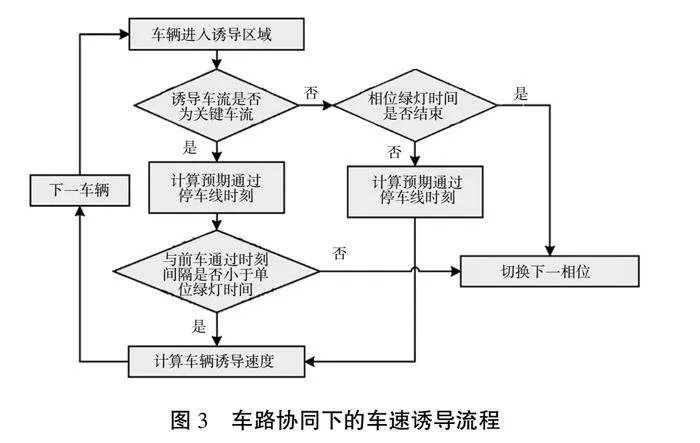
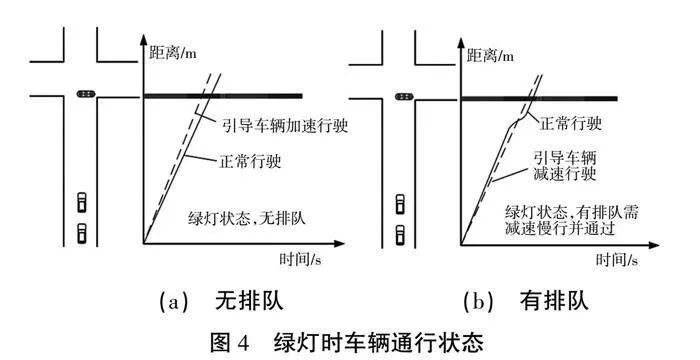
传统交通协调车速诱导策略是以停车线内的一定长度为诱导区域,而在车路协同下诱导区域可以扩展至整个路段[4],车辆信息、交通流信息、车辆行驶路径、变道情况都能够实时捕捉、传递,协调的范围更大、效果更强。车路协同下的车速诱导流程如图3所示。当车辆进入干线道路后,交通协调系统根据实时路口排队情况、下游路口绿灯相位、车辆与路口距离等信息,确定车辆诱导速度,然后通过人机交互系统,告知驾驶者绿波速度、最优车道等,调整车辆驾驶行为。若车辆以最大速度仍不能通过交叉口,则在此周期内车辆无法通过诱导车速实现不停车通行,需要结合下游交叉口车辆排队信息,确定首车通过路口的最早界限时间,调整诱导速度保证车辆形成饱和车队。交叉口绿灯状态下无排队和有排队时的车辆通行状态如图4所示。
2.2 信号协调控制
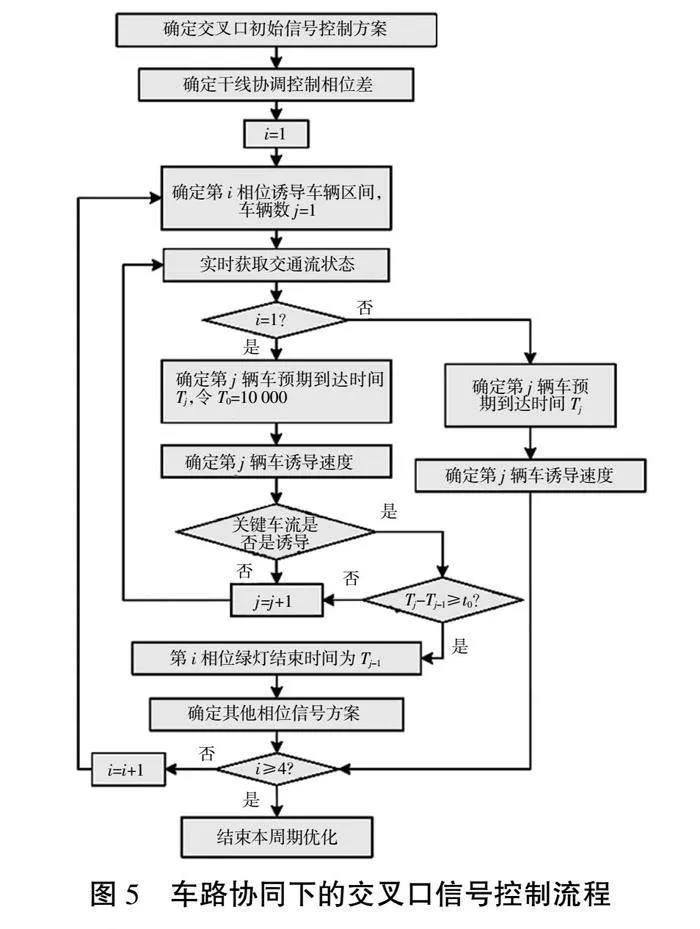
车辆诱导措施需要与交叉口信号控制方案配合,才能实现交通流的协调优化。常规的信号控制采用相位顺序调整、非关键相位延长或提前中断等方法,无法兼顾不同方向的车流诱导,只能使部分车辆的通行受益,对范围内交通控制相位差造成破坏。在车路协同下,干线全段都作为车速诱导区,车辆从驶出当前交叉口开始,就已进入下游交叉口交通诱导范围内。车路协同环境下的交叉口信号协调控制流程如图5所示。以关键车流为诱导的主要对象,以关键车流的相位为下游交叉口交通信号的第一相位,根据全线交通情况计算相位控制的周期时长,结合诱导速度范围、交叉口间距等计算干线协调的相位差范围。然后对诱导范围内不同相位的车辆进行分析,确定最大诱导车速及最大绿灯结束时刻,进而确定上游交叉口停车线最晚时刻[5]。在诱导时间内,以上一周期遗留排队消散时,本周期首车恰好通过停止线为车辆通过交叉口预期时间的临界时刻,超过此临界时刻则车流无法在诱导时间内顺利通过路口,需要反馈并调整信号灯相位控制措施。对关键车流进行逐车分析,判断后车是否能够在诱导速度范围内与前车形成一个车队通过交叉口,若不能,则以前车通过路口的预期时刻为相位结束时刻。
2.3 诱导车速与信号控制相位差优化模型
相位差的取值关系到车流能否在绿灯期间不停车通过下游交叉口。在车路协同环境下,根据实时交通流状态信息,相位差方案并非仅根据交叉口间距和绿波带设计速度被动确定,而是以干线双向车流协调的最优控制为目标,在满足诱导速度范围的前提下,进行相位差方案的调整。
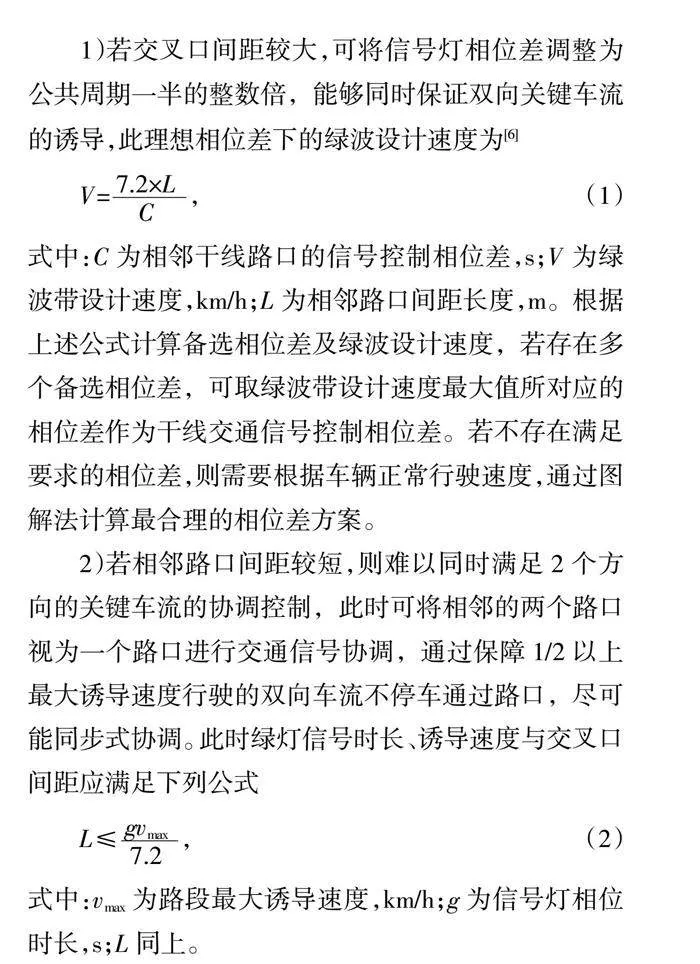
1)若交叉口间距较大,可将信号灯相位差调整为公共周期一半的整数CbkRcy5XAFbRut34RMra9VX92WiQYmyt6p+1KrVSTnE=倍,能够同时保证双向关键车流的诱导,此理想相位差下的绿波设计速度为[6]
式中:C为相邻干线路口的信号控制相位差,s;V为绿波带设计速度,km/h;L为相邻路口间距长度,m。根据上述公式计算备选相位差及绿波设计速度,若存在多个备选相位差,可取绿波带设计速度最大值所对应的相位差作为干线交通信号控制相位差。若不存在满足要求的相位差,则需要根据车辆正常行驶速度,通过图解法计算最合理的相位差方案。
/H7mpc7BvmGM7l37vhHxGuhLMgAFEiGsyOLiDvRd/IA=2)若相邻路口间距较短,则难以同时满足2个方向的关键车流的协调控制,此时可将相邻的两个路口视为一个路口进行交通信号协调,通过保障1/2以上最大诱导速度行驶的双向车流不停车通过路口,尽可能同步式协调。此时绿灯信号时长、诱导速度与交叉口间距应满足下列公式
式中:vmax为路段最大诱导速度,km/h;g为信号灯相位时长,s;L同上。
3 案例应用分析
本文以某市主干线路5个相邻路口A、B、C、D和E为依托,调查各交叉口的交通数据,建立干线交通协调VISSIM仿真模型。其中,A、C、D、E交叉口分别位于B路口的南、北、东、西侧,本文以B交叉口为主要研究对象。在干线方向,交叉口进口道车道组成为1条左转+2条直行+1条直右,车道宽度3.5 m。交叉口间距为:A—B间距430 m,B—C间距385 m,B—D间距635 m,B—E间距720 m。交通数据来自市交管控制中心,某周三早上7:00—9:00的交通数据见表1。
3.1 模拟试验方案
方案一为根据现状交通情况进行的模拟试验,根据交通统计数据,车辆正常速度为40 km/h,饱和流率1 450 pcu/h,饱和车头时距2.5 s,车辆期望加速度3 m/s2。车辆速度、车流信息通过COM接口实时输入的信息进行控制,并向VISSIM输出改变车辆速度的控制命令,信号控制方案根据交管控制中心数据确定,不作改变。
方案二为进行车速诱导+信号控制优化方案,根据道路功能及设计速度,确定最大诱导速度60 km/h,最小25 km/h。车速诱导区域为交叉口围成的全段道路,信号控制方案根据第二章建立的模型及流程进行实时调整,其他信息的录入与方案一相同。
3.2 交通仿真分析结果
通过仿真软件VISSIM进行交通流运行计算,输出停车次数、平均延误时间等指标。根据相关研究[7],计算综合性能评价指标PI对交通诱导效果进行评价,其计算公式如下
PI=0.954d+8.078n, (3)
式中:d为平均延误时间,s/pcu;n为停车次数,次。
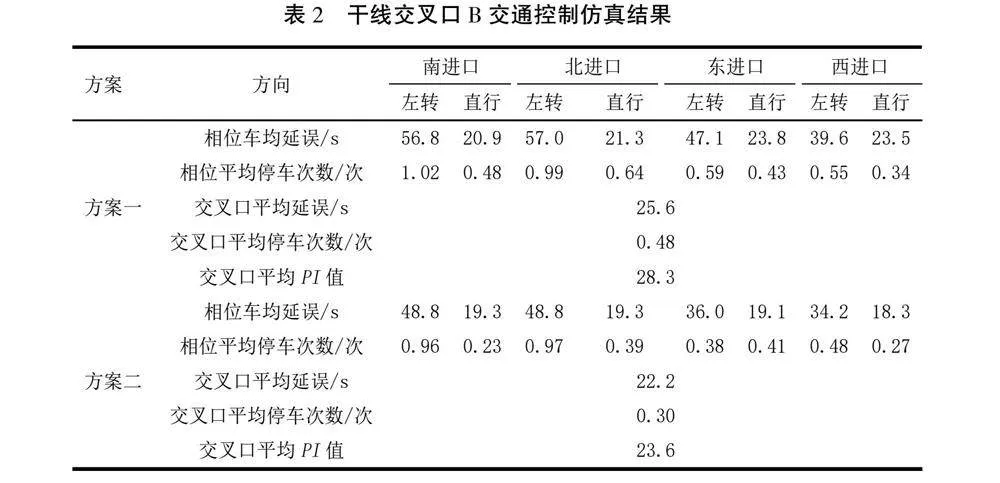
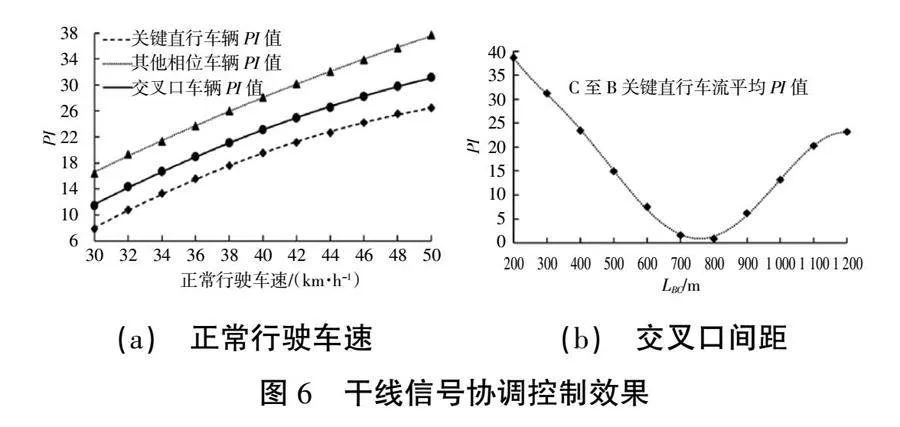
交叉口的仿真计算结果见表2和图6(a)、(b)所示。
根据仿真结果,在干线信号控制优化后车均延误指标下降13.35%,平均停车次数指标下降37.62%,交叉口平均值下降16.61%,有效提升了路段通行效率。路口左转相位的PI值仍明显大于直行PI值,这是由于左转相位车流仍需等待直行相位结束后方可通行,表现为被动式车速诱导,因此左转PI指标较大。但整体来看,采用实时车速及信号配时控制能够明显提升直行车流车速诱导效率,平均停车次数的改善效果更为明显。
4 结论
本文从主干线交通协调系统框架、协调措施、诱导车速及相位差模型方面,分析车路协同实时交通参数互联互通条件下的干线交通动态控制技术。车路协同干线交通协调控制系统主要由智能路侧系统、智能车载系统、交通控制系统组成。论文设计了车速诱导+信号控制方案的流程与优化模型,并以某省会城市5个相邻交叉口的交通数据为依托,建立干线交通协调VISSIM仿真模型。结果表明,相比仅采用车速诱导方案,车速诱导+信号控制方案能够有效提升路段通行效率,车均延误指标下降13.35%,平均停车次数指标下降37.62%。
参考文献:
[1] 鹿应荣,许晓彤.车联网环境下信号交叉口车速控制策略[J].交通运输系统工程与信息,2018,44(11):2257-2266.
[2] 刘欢,杨雷,邵社刚.车路协同环境下信号交叉口速度引导策略[J].重庆交通大学学报(自然科学版),2019,38(12):8-17.
[3] 卢凯,徐建闽.进口单独放行方式下的干道双向绿波协调控制数解算法[J].中国公路学报,2013,23(3):95-101.
[4] 卢凯,郑淑鉴,徐建闽.面向双向不同带宽需求的绿波协调控制优化模型[J].交通运输工程学报,2018(5):101-108.
[5] 唐克双,孔涛,王奋.一种改进的多带宽干线协调控制模型[J].同济大学学报(自然科学版),2022,41(7):1002-1008.
[6] 荆彬彬,卢凯,鄢小文,吴焕,徐建闽.车路协同下基于速度引导的双周期干道绿波协调控制方法[J].华南理工大学学报(自然科学版),2016,44(8):147-154.
[7] 马万经,吴明敏,韩宝新.考虑可变速度调节的单点交叉口公交信号优先控制方[J].中国公路学报,2018,26(2):127-133.