倾斜摄影测量技术在房地一体测绘中的应用
2024-11-02 00:00:00刘一鸣
科技创新与应用 2024年31期
摘 要;为解决农村房屋测量的低效率、高成本和长耗时问题,该文采用无人机倾斜摄影测量技术进行房产精准测绘。首先利用无人机倾斜摄影获取不同角度的影像,构建实景三维模型,然后在三维模型上利用CASS3D软件进行内业数据采集,得到房地一体地图成果。通过检查点和界址线的中误差对倾斜摄影成果进行精度分析,结果表明,无人机倾斜摄影测量技术可以完全满足技术规范,数据成果精度高,有效地提高工作效率与质量,缩短项目生产周期。
关键词;倾斜摄影测量技术;房地一体;实景三维模型;CASS3D;精度分析
中图分类号:P237 文献标志码:A 文章编号:2095-2945(2024)31-0071-05
Abstract: To solve the problems of inefficiency, high cost and long time-consuming in rural house measurement, this paper uses UAV tilt photogrammetry technology to accurately survey real estate. First, UAV tilt photography is used to obtain images from different angles, and a real-life three-dimensional model is built. Then, CASS3D software is used to collect indoor data on the three-dimensional model, and the results of the integrated map of the premises and buildings are obtained. The accuracy of tilt photography results is analyzed through the medium errors of checkpoints and boundary lines. The results show that the UAV tilt photogrammetry technology can fully meet the technical specifications, and the data results have high accuracy, effectively improve work efficiency and quality, and shorten the project production cycle.
Keywords: tilt photogrammetry technology; integration of premises and buildings; real-life three-dimensional model; CASS3D; accuracy analysis
倾斜摄影测量技术是利用倾斜摄影机和相应的处理软件来获取和处理倾斜摄影的方法[1]。相比于传统的垂直摄影测量技术,倾斜摄影测量技术能够提供更加真实、细致和高分辨率的三维地理信息。其通过将相机倾斜安装在飞行器或地面车辆上,以不同角度拍摄目标区域,从而得到倾斜的影像数据。通过利用同一相机不同位置拍摄的影像、匹配特征点或特定的控制点,进行影像的定位和定向倾斜摄影测量技术的原理主要涉及2个方面:相对定向和绝对定向。相对定向是指在摄影测量过程中定向。绝对定向是指将倾斜影像与地理坐标系统进行对齐,确定影像中各个目标的地理位置。
倾斜摄影测量技术需要倾斜摄影机、导航系统和数据处理软件等关键设备和工具的支持。倾斜摄影机通常包括多个摄像头,能够同时捕捉地面的不同角度的影像[2]。导航系统则用于记录倾斜摄影机在空间中的位置和姿态,并提供参考数据以进行定位和定向。数据处理软件则用于处理倾斜摄影产生的大量影像数据,进行影像匹配、特征提取和三维重建等操作。
无人机倾斜摄影技术可以随时进行任务部署和数据采集,不受时间和地点的限制。相比传统航空摄影测量,无人机可以在更近的距离和更低的高度下进行飞行,通过拍摄多角度的影像,能够捕捉更丰富的地表信息,包括建筑物、道路、植被等。无人机倾斜摄影技术结合GNSS/IMU系统,能够实时获取飞行平台的位置和姿态信息,并将其与采集到的影像数据进行联合处理,从而实现高精度定位和姿态校正。同时,相比传统的航空摄影测量,无人机倾斜摄影技术具有更快的任务响应能力和数据收集速度,能够在短时间内获得大范围、高质量的影像数据[3]。此外,无人机倾斜摄影所需的设备和人力成本相对较低,可以提高测绘工作的效率和经济性。
1 无人机倾斜摄影测量技术在房地一体中的作业流程
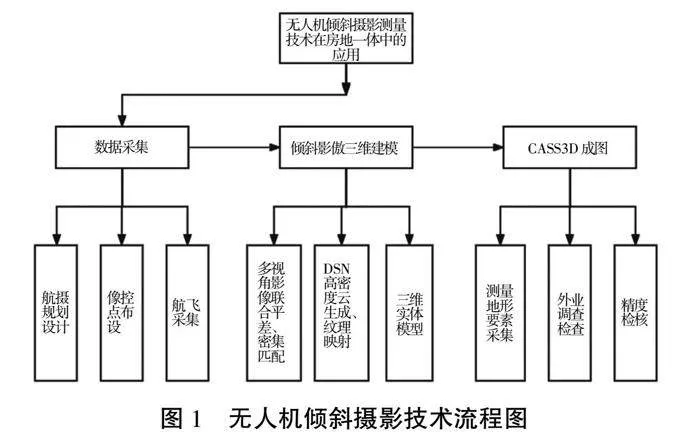
无人机倾斜摄影测量技术主要是通过数据采集获取航拍影像数据,然后构建实景三维模型,最后实景三维模型对模型轮廓进行矢量化绘制。绘制主要是通过CASS3D软件对建筑物、构筑物进行矢量采集,然后对采集的矢量数据进行编辑和修饰形成能够达到房地一体要求的成果。测量流程如图1所示。
图1 无人机倾斜摄影技术流程图
1.1 获取航空摄影影像
1.1.1 测量航带规划设计
倾斜摄影航线规划设计在航空摄影中起着极其重要的作用。为了确保无人机操作的规范化,并制定出相应的处理流程,实施全过程规划管理,避免航线规划不合理造成最终的测量成果精度满足不了规范要求。航线规划设计流程如下。
1)划分航带:按测量区域范围和飞行速度,将航区划分为若干条航带。通常情况下,航带的宽度为地面分辨率的两倍,以确保图像的质量和准确性。
2)航向重叠:相邻航带之间需要有一定的重叠,以保证航带的连续性和完整性。航向重叠度通常为60%~80%,可根据实际情况作适当调整[4]。
3)旁向重叠度:为了减少重复劳动和节约资源,同一航带内不同摄站之间的图像也需要有一定的重叠度。旁向重叠度通常为30%~50%。
4)飞行方向:根据测区的地形和气候条件,确定飞机的飞行方向。一般情况下,飞行方向应与主导风向垂直,以减少风对飞行速度的影响。
5)飞行速度:根据航摄仪的性能和波段的宽窄,选择合适的飞行速度。过快的飞行速度会造成图像模糊,过慢则会造成工作效率的降低[5]。
6)像幅大小:根据测区的实际需求和航摄仪的性能,确定像幅大小。影像的解析度、测绘精度等都会受到影像尺寸的直接影响。
1.1.2 像控点布设
倾斜摄影像控点布设是实景三维模型重建过程中的关键环节,对模型精度和效果具有重要影响。像控点布设,在倾斜摄影过程中,有以下几个方面是需要考虑的。
1)布设原则:像控点应均匀分布在测区内,确保拍摄到的图像具有较高的覆盖度和重叠度。同时,要避免将像控点布设在阴影、遮挡等不利于测量的地方。
2)布设方法:根据测区的地形、飞行参数和拍摄需求,采用合适的布设方法。常见的布设方式有几种,如网状的布点、导线的布点等等。
3)布设数量:根据测区面积、精度要求以及无人机载荷等因素,确定像控点数量。一般情况下,重建的车型准确度越高,就会有更多的控制点[6]。
4)布设坐标:像控制点的坐标是根据测区的平面座标系统和高程系统来确定的。坐标应精确到厘米级别,以确保测量精度。
5)标识与保护:在实地布设像控点时,应设置明显的标识,以便于后续的测量和核查。同时,要保护像控点,避免被损坏或移动。
6)数据处理与融合:在像控点布设完成后,需要对采集到的影像数据进行处理和融合,将像控点坐标与影像数据相结合,生成实景三维模型。
7)精确度校验与优化:为完成实景三维模型的重建工作,对模型进行精确度的校验与评估。如发现模型精度不足,为提高模型精度,可适时对图像控制点布设方案进行调整。
1.2 构建实景三维模型
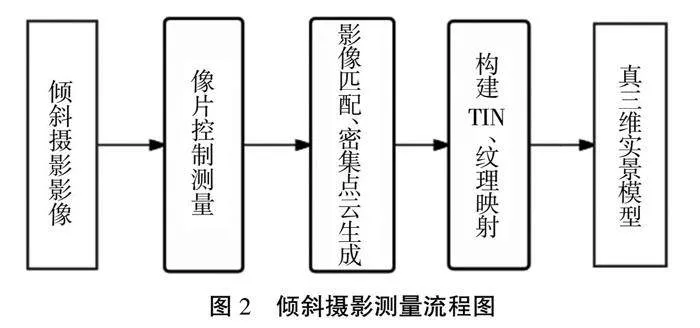
通过无人机多相机多视角倾斜摄影获取高精度影像,对获得的航拍和像控测量数据进行预处理,利用Context Capture系统进行多视影像联合平差,通过特征点提取和连接点匹配,以及光束法区域网整体平差进行空中三角测量[7]。根据影像的外方位元素以及相机与目标之间的相对位置,选择适当的影像组成三维像对。接着,通过点云匹配计算,将不同影像上的点云数据对应起来,并构建三维TIN网。最终,根据TIN网中每个三角形的空间位置,将最佳视角的影像映射到模型上以作为纹理,顺利实现实景三维模型的重建[8](图2)。
图2 倾斜摄影测量流程图
1.3 内业数据采集
首先,对原始图像进行畸变校正和高精度位置数据(POS)的融合计算,接着利用Context Capture软件迅速创建测区的数字表面模型(DSM)和数字正射影像图(DOM),并同步生成三维模型文件。随后,使用CASS3D软件构建三维模型并提取不动产权属信息,这些信息包括研究区域内的道路网络、建筑物角点、庭院界限等。此外,还需进行地籍地图资料的制作工作。如模型中出现空洞或模糊区域,需进行现场补充测量,以确保数据成果的全面性。
2 精度评定
在完成农村房地一体化测绘成果的生产后,必须对这些数据成果进行精度评估,确保其符合规范和生产应用的标准,然后才能进行数据库的存储。在本研究中,运用中误差指标对农村房地一体化测绘成果的精度进行了分析和评估。该过程主要利用高精度实时差分定位技术(RTK)、全站仪等先进测量仪器,在测区采集了一系列检核点的数据。随后,将这些检核点数据与房地一体化测绘成果中的相应数据进行了对比分析。并通过计算得出中误差,以此来评价测绘成果的精确度。如式(1)、(2) 所示。
式中:mX、mY分别代表在X、Y方向的坐标误差;Δ代表检核点在各个方向的实际误差;n则是本次研究中使用的检核点总数[9]。测绘成果平面上的误差mS可以根据X和Y方向的坐标误差通过公式(3)来计算得出。
3 结果与分析
3.1 数据获取与预处理
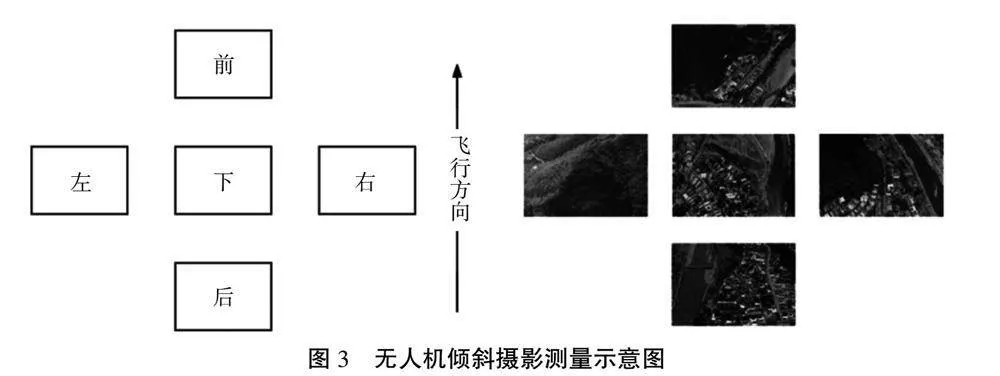
此次利用飞马无人机进行倾斜航飞数据采集,此次共飞行4架次,飞行高度150 m,航向重叠度80%,旁向重叠度70%,此次共获取航片6 500张,测量核查点12个,核查边缘12个。利用飞马后处理软件进行POS解算,将其转化成Context Capture相匹配的格式(图3)。
3.2 实景三维模型构建
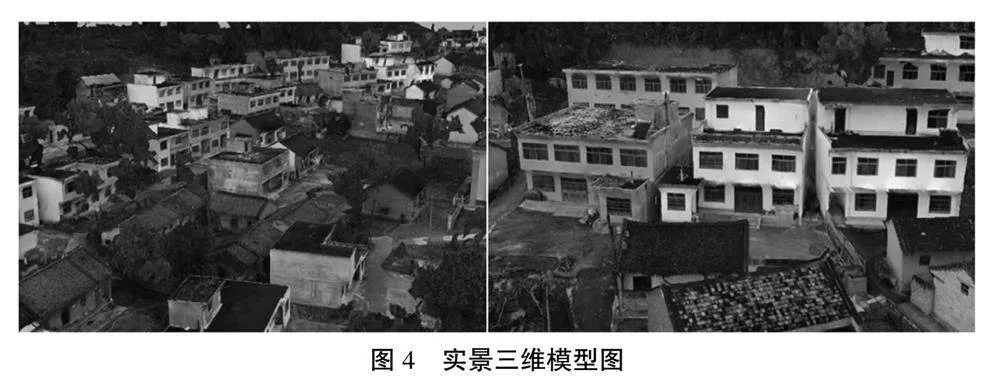
在本次操作中,首先将航空影像、位置测量数据(POS)以及倾斜摄影相机的相关参数,包括焦距和主点等信息,导入Context Capture软件中。完成参数配置后,执行空中三角测量(空三)处理,随后开展控制点的刺点工作。完成刺点后,再次执行空中三角测量处理,以此来获取项目区的实景三维模型(图4)。
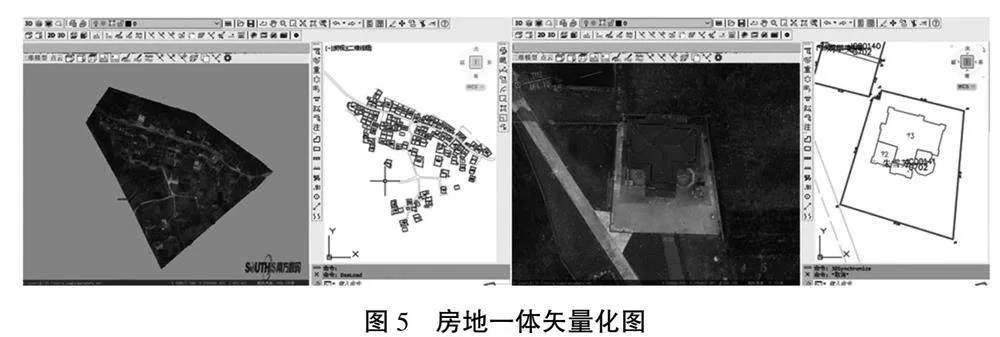
3.3 内业数据采集
获得实景三维模型后,按照房地一体化成果要求进行矢量化处理。本次采用CASS3D软件在三维模型上进行建筑物和构筑物矢量化。采用二、三维互动的方式进行采集作业,在三维模型上,精确获取了房屋的体量、檐口、屋顶、阳台和门廊等详细数据,并利用二维正射影像对地物要素属性进行准确判断,大大提高了农村房地一体化测绘成果的生产效率。在内业数据采集完成后,如果出现模型空洞现象,及时进行外业补测,以确保测绘成果的准确性(图5)。
3.4 精度评定
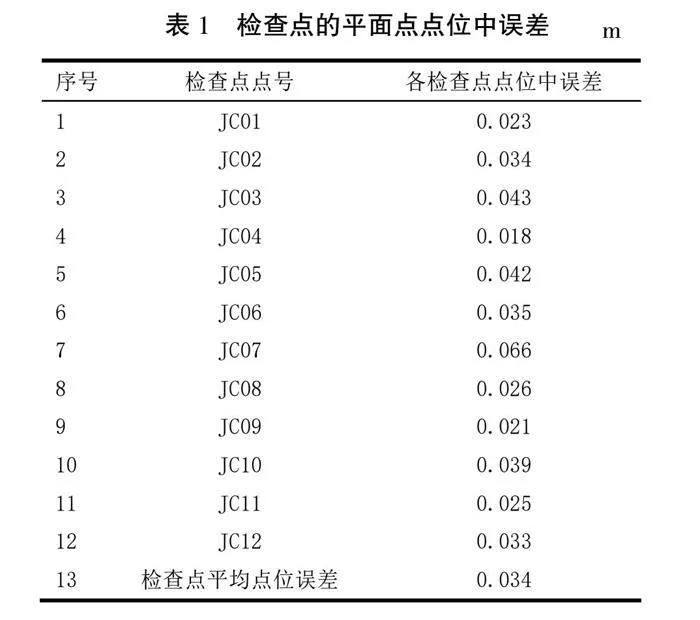
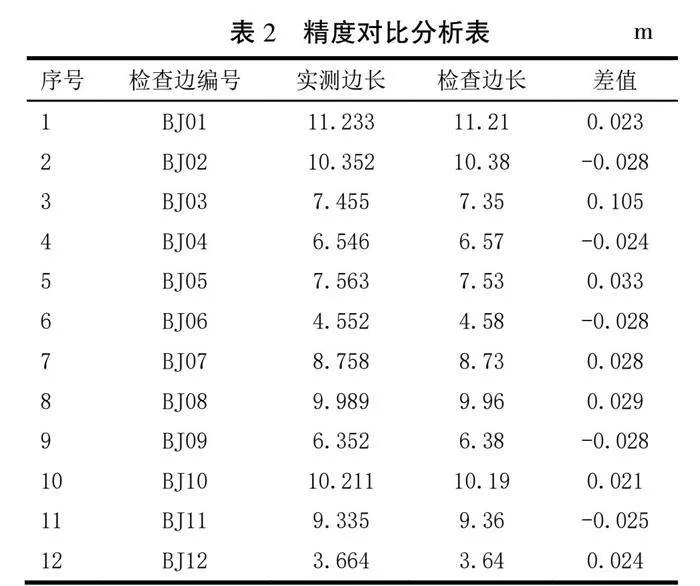
在完成测绘结果之后,必须对数据结果的准确性予以评估和分析,确保其满足规范和生产应用的需求,进而才能将其存入数据库。本研究通过对点位验证精度和距离验证精度2方面的分析,对农村房屋综合测绘结果的精度进行了评估。在试验区,我们采用高精度实时差分定位(RTK)、全站仪、激光测距仪等测量设备收集各检查站的数据,将这些数据与测绘结果中的对应数据进行对比,计算得出误差的中值。各检查点的平面点误差结果见表1,精度对比分析见表2。
根据表1的数据分析,采用倾斜摄影技术进行农村房地一体化测绘的结果显示,其坐标平均点位误差为0.034 m,优于房产测绘规范所规定的0.05 m的误差标准。进一步观察表2的数据,倾斜摄影测量得到的界址边长较差为0.033 m,同样满足房产测绘规范中对0.05 m误差限的要求。综合分析,本次研究使用的无人机倾斜摄影测量技术在农村房地一体化测绘中展现了较高的精确度,满足规范要求。此外,该技术在提升外业数据采集和内业数据处理效率方面也表现出显著优势,通过内外业数据的协同工作,有效地改善了传统测绘作业模式的局限性。
4 结论
农村房地一体化的测绘工作是确立基础的重要任务。尽管传统的数据生产方式在准确性方面较高,但其耗时长且需要大量人力,导致数据生成周期较长,无法满足农村房地一体化测绘工作的快速发展需求。然而,随着无人机倾斜摄影测量技术的不断改进,设备成本显著降低,数据采集准确性也得到大幅提升。因此,本研究采用了无人机倾斜摄影测量技术来执行农村房地一体化测绘任务,成功获取了研究区域广阔范围内的高精度实景三维模型。随后,使用EPS数据处理软件进行内部数据采集。由于二维影像与三维模型的紧密结合,大大提高了农村房地一体化测绘成果的生产效率。同时,这种方法也确保了数据的高准确性,满足相关规范和生产应用的要求。这一成果为房地一体化的快速更新以及大比例尺地形图在广泛范围内的生产提供了可靠有效的作业途径。
参考文献:
[1] 魏军,于洪雨,靳巧珠,等.无人机倾斜摄影技术在农村房地一体确权登记项目中的应用研究[J].测绘与空间地理信息,
2023,46(2):60-63.
[2] 苗小芒.无人机倾斜摄影测量在大比例尺测图技术中的应用
研究[J].信息记录材料,2021,22(12):131-132.
[3] 贺璐方,胡新玲,肖桂园,等.基于倾斜摄影测量的实景三维建模与精度评定[J].电子测试,2021(4):35-37.
[4] 黄权进.无人机倾斜摄影技术在大比例尺地形图测绘中的应
用[J].工程技术研究,2020,5(17):108-109.
[5] 李欢.低空无人机倾斜摄影测量成果精度研究[J].甘肃科学学报,2020,32(2):27-33.
[6] 张松浩.基于PPK技术的无人机测绘精度分析研究[D].唐山:华北理工大学,2020.
[7] 谭燕萍.低空无人机倾斜摄影测量系统在美丽小镇建设中的
应用[J].测绘与空间地理信息,2018,41(3):72-74.
[8] 郭昕阳.输电线路激光扫描三维成像技术研究与应用[D].北京:华北电力大学,2013.
[9] 徐柳华.无人飞行器影像处理研究及其实现[D].长沙:中南大学,2009.