具身交互:智慧学习环境下身体在场的互动观
2024-10-04 00:00:00杨重阳武法提
中国电化教育 2024年9期
摘要:智慧学习环境中身体意义在教学交互中的缺失,使得课堂教学变革难以从深水区突围。身体在场成为教学变革的核心突破口。该研究首先依托现象学哲学的发展脉络,溯源身体在场的理论基础,解读现象学、认知科学、交互系统设计、教育元宇宙等领域中身体在场的侧重点,从中抽取出“身体在场”的具身性本质。其次,依托具身性的演化路径,从互动观视角重构身体在场的理论体系,即具身交互理论。该理论秉持“身体参与意义建构的体验性交互活动”的观点和“感知-行动-反思”的循环结构,支持身体、大脑与环境协同参与意义建构,体现出基于身体感知、感知为了行动、行动伴随意义的特征。最后,通过归纳并融合教学交互模型与具身交互模型的双重优势,结合具身交互的本质内涵和循环结构,生成具身交互模型的设计原则和行动机制,构建由“被动感知交互、主动感知交互、行动交互和反思交互”组成的、以学为中心的RBAP模型,明确四要素及相互作用关系、智慧学习环境对四要素的支持作用,助力具身交互行为的识别、具身交互教学设计的开展与具身交互程度的评估,继而突破理论的桎梏实现常态化应用。
关键词:智慧学习环境;现象学;身体在场;具身交互;RBAP模型
中图分类号:G434 文献标识码:A
* 本文系国家社会科学基金教育学一般课题“基于人机智能协同的精准学习干预研究”(课题编号:BCA200080)研究成果。
一、智慧学习环境下身体意义在教学交互中缺失
第四次工业革命以来,数字化浪潮的态势显著并纵深发展到各个领域。政府部门以教育政策为导向部署教育数字化的重大战略目标[1],自上而下地推动教育数字化转型。智慧学习环境的创设与升级是实施教育数字化战略行动的首要任务,为教育全要素、全业务、全领域和全流程的数字化转型奠定基础。教学交互是教学活动设计的外显形式,是连接各要素的桥梁,发生在教学主体和学习环境之间[2]。教学主体通过推理交互行为反映的意义或意图,支持学生开展问题解决与知识建构。智慧学习环境中数字资源与智能工具等要素的迭代升级丰富了教学交互的类型,数据与模型等要素的定向应用增强了教学交互的时效性,继而通过发挥教学交互的促进或抑制作用,转变师生的心理状态或行为模式[3],促进意义学习的发生。
受笛卡尔的身心二元论的影响,学习通常以心智与身体分离的观点为指导,被视为发生在心智中的活动、脖颈以上的行为[4]。基于此,以大脑为单一学习源的“计算-表征式”认知科学和知识传递式教学成为一种主流的教育方式延用至今[5]。尽管智慧学习环境中的数据、资源与工具等要素提升了教学交互的效果,改善了传统的经验式、一体化教学的不足,推动其向数据驱动式教学方向演进。但是,教学交互仍被单纯地用于助力学生大脑的信息加工和意义生成,忽略学生的身体、环境参与认知过程。这使得难以发挥身体的历史化和社会化、环境的智能化和情境化等优势,开展基于经验感知、情境再现与社会交互的教学(尤其在概念抽象类、立体空间类、文言故事类知识建构,探究实践类、工程机械类技能训练等教学中),难以落实做中学的理念,导致学生的主观能动性、参与的积极性均未被有效激活。譬如,在有限的45分钟课堂中,教学交互方式仍以“教师主导发起-学生被动回复”的单一对话为主,教师对学生的关注度不够,交互深度不足且缺乏高阶认知交互。本研究旨在智慧学习环境中,通过挖掘身体的特点和意义,探索“身体-环境-大脑”协同支持认知加工、意义建构和问题解决的交互方式,改善教学交互中身体意义缺失的不足,提升学生的能动性和参与度。
二、具身性:身体在场的理论溯源
何为具身性?现象学中最经典的观点莫过于“具身性是主体参与世界或环境的方式”[6],通过主体身体的意向性活动与独特的表现再现世界(社会/事物),且可被观察和描述[7]。换言之,具身性重视主体的身体参与及知觉意识,强调身体的主体性特征及身体在知觉经验中在场的观点[8]。这一理念颠覆了笛卡尔的身心二元论,使得身体的重要作用逐渐凸显,身体在哲学中的地位扶摇直上。身体作为躯体,具备知觉性和运动性双重属性。一方面,身体的感知觉系统可基于多重感官功能系统性输入外在信息,产生不同的心理体验,如视觉与触觉的共现可帮助构建完整的躯体结构。另一方面,身体的运动系统可基于现实的身体结构输出行为动作,身体行为动作蕴含了对身体意志的表达,并赋予身体以时间性和主动性特征,如身体行为可表征主体的理解程度、语义意图。由此,身体的知觉性和运动性属性激活了心理体验和身体行动[9],生成了身体在场的多元化视角。身体在场的观念(即通过身体与世界互动)成为研究者关注的重点,并逐步拓展到认知科学、交互系统设计、教育元宇宙等各个领域。
(一)现象学:知觉经验中身体在场
梅洛·庞蒂批判性地继承与深化胡塞尔思想,强调身体在调节内部经验和外部经验的关键作用[10],并将“身体”在知觉中的地位提至历史新高。一方面,赋予身体以存在论的地位与知觉意向性的底线,即身体是存在于世界的根本,人的内部知觉(视、听、触、嗅、动)均以身体为基础而开展。另一方面,从知觉现象学中抽取具身性思想,凝练出“物质-环境-身体”的外部感知场,强调个体理解或体验世界时,身体的感知过程和身体图示的重要作用[11]。
(二)认知科学:认知过程中身体在场
第二代认知科学通过融入具身性理念,衍生出具身认知理论。该理论强调身体不再是被边缘化的物理载体,而是作为认知主体参与了整个认知过程[12],影响着有机体的心智与思维。不同的身体构造和不同的身体参与方式会形成不同的认知[13]。现象学视域的具身认知理论关注身体知觉和身体经验对认知的重要作用,强调通过刺激身体的感官官能体验世界、积累经验[14]。生成论视域的具身认知理论关注身体知觉、身体动作与外部环境的互动,强调在“感知-运动”的循环过程中生成认知[15]。镜像神经元视域的具身认知理论强调基于镜像机制激活观察者感知动作与执行动作的具身模拟链路,实现对身体动作的观察与模拟[16]。
(三)交互系统设计:交互功能中身体在场
Dourish首次将身体在场的具身性理论应用于人机交互的界面设计当中,强调通过模拟人与人的交互机制,建立身体行为与身体意义的关系,设计并开发人机交互功能,支持用户通过与人工制品的行为交互来创造、操控和共享意义[17]。智能技术的迭代升级愈加凸显身体对人机交互的调节作用[18],甚至支持身体与机器双向交互功能的实现(包括机器对身体官能的刺激、身体对机器功能的反馈)。例如,具身智能通过综合仿生学、软体机器人、触觉反馈设备等跨学科技术,设计稳健的、高鲁棒性的智能体,支持开展多感官具身体验和意义感知(如基于力反馈嵌入的具身智能大模型操控的机械臂,实现自主规划、决策与执行刮胡子行为)。
(四)教育元宇宙:信息传播中身体在场
教育元宇宙基于具身认知理论、分布式认知理论和沉浸理论等相关理论基础,依托其技术组成和空间属性,塑造出视觉沉浸、虚实交织、人机协同的立体空间场域[19],支持信息传播时现实人和虚拟人(虚拟化身)的同域共存、同频感知、同步交互等功能[20]。换言之,教育元宇宙强调信息传播过程中的身体在场,通过全息技术和可穿戴设备调动现实主体的身体感知运动系统,实现虚拟化身与虚拟现实世界的交互,同时将信息传播过程中的身体体验反馈给现实主体,开展可见即可知、可想即可试的行动。
本研究将具身性视为身体在场且主动参与的属性,具备情境性、主动性、意向性、体验性与建构性等特征,可以被感受、体会和量化。本研究依托身体感知觉系统与身体运动系统的功能,将具身类别划分为意向具身和物理具身两类[21]。意向具身通过主体与信息(资源)的交互实现,即主体通过直接想象或他人语言表述的间接想象获得感受和认知。物理具身则通过主体与工具的交互实现,包括直接具身(通过主体身体接触而获得的直观感受)、代理具身(操控外部工具表征个体)、增强具身(借助增强反馈工具实现认知发展)。
三、具身交互:互动观视角下具身性的演化结果
(一)具身交互起源于相关领域对具身性的研究
研究者依托现象学、认知科学、交互系统设计、教育元宇宙等具身性应用和社会学的互动理论,凝练出具身交互的概念,并将其解读为“身体知觉和身体经验的转化应用活动、身体参与意义建构的交互活动、基于身体行为与意义的关系开展交互设计分析的方法、基于智能技术延展身体知觉所带来的沉浸式体验活动”等观点。具身交互作为一种身体参与意义建构的交互活动的观点被广泛应用于教育心理学等领域。例如,Abrahamson将具身交互视为一种技术支持和身体参与的训练活动,旨在依托具身认知理论开展感知设计与动作设计[22],建立主体的心理空间与身体动作的映射联结关系[23]。王辞晓将具身交互视为身体在场的交互,强调主体运用身体的习得性技能在物理世界中开展交互,并将感知意向内化到心理空间[24]。叶浩生通过系统梳理主体与外部环境的宏观交互、身体外显动作的中观交互和身体感官官能的微观交互[25],初步明确具身交互行为、深化身体参与意义建构的过程。
(二)具身交互发展于具身认知的理论基底
具身认知理论动摇了第一代认知科学中“计算-表征”、身心分离的核心思想,主张认知不应被视为孤立的信息加工,而是嵌入身体和环境的活动[26],是在大脑、身体和环境的交互过程中生成的[27]。Abrahamson在生成论视域下的具身认知理论中融入身体在场的观点,提炼出基于直觉经验认知系统和结构推理认知系统生成的“感知-行动”循环过程[28]。直觉经验认知系统是感知的基础,结构推理认知系统是行动后获得新经验的存储场所。感知为了行动产出,行动深化感知体验。教学过程中学生的认知加工有赖于教师围绕特定的教学目标,有目的、有计划地引导,助力学生的大脑、身体、环境与认知对象发生有效互动[29]。换言之,教学过程同样注重通过情境支持的反思性实践实现有效交互,达成“学习中行动→行动中反思→反思中实践→实践中建构”的螺旋式具身学习流程[30]。基于此,研究者从具身认知的“感知-行动”中抽取出反思要素,构建由“感知-行动-反思”组成的具身认知的循环结构。
本研究秉持具身认知的“感知-行动-反思”循环结构、精炼“身体参与意义建构的交互活动”观点,将具身交互界定为身体在场的(包括身体知觉、身体经验、身体动作和身体意义在场),身体、大脑与环境协同参与意义建构的体验性交互活动,体现出基于身体感知、感知为了行动、行动伴随意义等特征。其中,身体知觉和身体经验在场关注身体感知觉系统对信息的感知体验和内化加工,身体动作在场关注身体运动系统与环境、人工制品交互时的联结映射与意义建构,身体意义在场关注信息传播中身体行动蕴含的意图和输出的反馈。
作为“身体在场的体验性交互”和“身体、大脑与环境协同参与的建构性交互”,具身交互既包括内隐层面的感知、想象等心理活动,又包括外显层面的身体姿态、手势动作、话语语调等身体动作。二者旨在基于感知体验和行为映射对问题解决产生原发性引导,促进意义建构。换言之,具身交互活动特指解决问题的活动,而非全部的心理活动和身体动作,通常基于主体与环境(工具/资源)的直接或间接交互进行表征。具身交互活动中,主体的身体结构与获取到的习得性技能,将进一步参与自身或他人新知识技能的生成,促使主体与环境在自发的交互过程中得以双向建构[31]。因此,除了继承具身性的主动性、体验性与建构性等特征外,具身交互还具备社会性与自组织等特征。这使得具身交互成为支持个体交互和社会交互共存的融合性交互活动。于个体交互,具身交互通过激活主体的知觉经验,助力身体、大脑和环境协同参与信息加工过程,消解知识的抽象程度,降低主体的认知负荷、加深临场感。于社会交互,具身交互通过加强主体间的社会参与程度开展群体知识建构,达成高阶认知。
(三)具身交互深化于互动模型的应用
互动模型作为连接具身交互的抽象概念与实践应用的桥梁,往往通过明晰互动主体、互动内容或互动阶段,指导多场景应用。教学互动模型关注师生间的互动及其对学习的促进作用,发生在教学主体与学习环境的相互交流、相互作用之中。研究者通常基于身体缺失与身体在场的特征,将其划分为教学交互模型和具身交互模型两类。例如,陈丽依托行为主义与建构主义理论,构建了网络学习环境下的教学交互层次塔模型,实现了从具体到抽象、从外显到内隐、从低级到高级的逐层递进[32]。该模型中的人机交互与人际交互的优势大幅度提升了学生的社会参与程度。然其主体身体缺失的特点,使得学生单纯依靠大脑的信息加工产生基于鼠标、键盘的输入行动,难以调动其他身体结构主动参与交互,身体在场的程度较低。胡翰林通过构建具象化的具身交互过程模型,将其抽象概念转变为具体阶段,包括身体感知、具身模拟与思维外显三阶段[33],即主体基于对实体、氛围的感知自主探索,刺激镜像神经元系统模仿学习,通过身体动作将大脑的理解与思考过程外显于形。黄洪涛等通过依次建立科学概念及空间环境的联结、外部行为与内部心理的映射等交互内容与交互步骤,构建了促进概念理解的具身交互过程模型[34],支持对学生的具身交互行为、科学概念的意义建构质量进行评估。Jackson以梅洛·庞蒂的身体介入环境开展互动的观点为指导,构建了教练式学习场景的具身交互模型[35],包括反思性具身(源于对他人外显行为的反馈,强调学习主体通过观察和模仿开展的交互)、反移情具身(源于他人表现出来的感受,强调教练的共情反应)、参与具身状态(源于放大自己的感受经验,强调学习主体关注自身的感知体验)、定制性具身(源于共享他人的感受体验,强调学习主体参与到他人经验当中共享体验)。上述三种具身交互模型中身体在场的共性特征,可全方位调动学生个体的身体、大脑与环境的协同交互,但却忽略了学生群体的社会交互行为,学生的社会参与程度较低。
综上所述,受笛卡尔身心二元论的影响,教学交互模型中身体对教学的促进作用被忽略,大脑(心智)在学习中主体地位的思想根深蒂固,其应用呈现出社会参与程度较高、身体参与程度不足等特征。具身交互模型秉持以学为中心的理念和身体参与交互活动的特征,支持学生个体的身体、大脑与环境协同参与,提升教学临场感。然而一方面,由于学生身体地位的提高和相关活动资源的不足,使其应用大多在实验室环境下以学生个体为单位开展,学生群体的社会交互活动较少。另一方面,由于教学实践者对具身交互模型的理解不足或设计不当,使其应用存在分散学生注意力、耗费学生心理资源、增强学生认知负荷的可能。智慧学习环境中数据、模型、资源、工具、服务和场景等要素功能[36],丰富了具身交互内容、拓展了具身交互形式,支持身体在场的个体交互与社会交互共存。因此,本研究通过融合教学交互模型中社会参与度高与具身交互模型中身体在场等优势,构建智慧学习环境下以学为中心的具身交互模型,支持将具身交互的抽象理论转化为具象应用。
四、智慧学习环境下的具身交互模型:具身交互理论到实践的桥梁
(一)具身交互模型的设计理念
1.融合教学交互模型与具身交互模型的优势
具身交互模型的设计需综合考虑教学交互模型的系统性、群体性、反思性和具身交互模型的主动性、个体性、体验性等交互优势,同时发挥智慧学习环境要素的功能作用,支持学生身体参与个体与群体的交互过程,助力高人际交互、高人机交互和高意义建构目标的达成。
2.关注主体的心理参与、身体参与和社会参与状态
教学主体的心理状态与身体动作的相互激活是具身交互活动需达成的内在成效,也是激活其内部动机、调节行为参与意愿与质量的重要因素。社会交互侧面反映出主体的主动程度、交互广度与投入深度。因此,主体的心理参与、身体参与和社会参与成为模型设计的关注点。
3.协调两个认知系统的参与和转化,建立行动与概念的映射关系
模型设计需调动直觉经验认知系统和结构推理认知系统的参与,实现外化于行、内化于智的建构行动。同时,在“感知-行动-反思”循环结构中建立抽象概念与简单概念、抽象概念与具体事物、抽象概念与身体动作等映射关系,实现对抽象概念的深度理解与正向迁移。
(二)具身交互模型的行动机制
本研究依托具身交互的“身体在场”特征、“体验性和建构性交互”内涵和“感知-行动-反思”的循环结构,结合具身交互模型的设计理念,构建由直觉经验认知系统、结构推理认知系统、感知系统、行动系统、反思系统等要素组成的具身交互模型的行动机制,如下页图1所示。五大要素相互关联、互为支撑,共同支持具身交互行动的发生与具身交互模型的构建。
1.构成要素
(1)直觉经验认知系统:具身交互的经验来源
该系统容纳了学生的先前经验与已习得的经验,经验类型包括身体知觉经验、抽象知识与具体事物的映射关系经验、抽象知识与身体动作的映射关系经验、结构化知识体系等。
(2)结构性推理认知系统:意义建构的存储场所
该系统承载了经过深思熟虑的加工与推理后的知识内容,通过多轮循环迭代将其内化到知识体系当中,是具身交互中意义建构结果和新映射关系经验的存储场所。
(3)感知系统:支持学生与资源的感知交互
该系统是感知信息的载体,依托身体的感知觉系统,实现学生与资源直接或间接的感知交互。感知系统是具身交互的基础,为行动系统与反思系统提供原始动力。
(4)行动系统:支持学生与他者的行动交互
该系统是运用信息的载体,依托学生语言系统与身体运动系统,支持学生与工具、学生与教师、学生与学生的行动交互。行动系统是感知系统外显表达的渠道,感知系统与行动系统的循环迭代过程为反思系统提供条件支撑。
(5)反思系统:支持学生与概念的反思交互
该系统是内化信息的载体,通过引导学生开展认知卸载行为,支持学生与概念的反思交互,实现对行动结果的反馈输出。反思系统为感知系统与行动系统循环结果提供反馈支持。
2.行动机制
具身交互模型的行动机制如下:首先,外部信号刺激学生感知觉系统的视、听、触、味、嗅等多重感官通道,调动身体的直觉经验认知系统,激活学生的心理参与状态(如激活经验、唤醒情绪),实现学生与资源直接或间接的感知交互。学生往往基于自身的知觉注意力及经验选择倾向性自主构建注意力锚,将感知到的信息主动外显化至行动系统,指导行动的产生。
其次,学生与他者(学生与工具、学生与教师、学生与学生) 通过主动开展言语对话、身体姿态、面部表情、手势动作等语言与非语言的行动交互,将感知到的信息作用于行动系统,实现从基于身体经验的感知到基于身体动作的转化,同时调动学生的身体参与状态和社会参与状态。行动交互的反馈结果将作用于学生的感知系统,进一步深化感知交互,实现感知系统与行动系统的循环交互,直至生成稳定的认知结果。
再次,引导学生开展文本撰写、概念图绘制、评价反馈等认知卸载行为,支持学生共享自身经验或反思他人的反馈结果,实现学生与概念的反思交互。反思交互结果不仅能反映学生的意义建构程度,而且能加深学生建立的抽象概念与简单概念、抽象概念与身体动作、抽象概念与具体事物等的映射关系,提升学生的认知参与水平与意义建构程度。
最后,“感知-行动-反思”的循环结构,促使学生主动将已习得的建构结果和映射关系存储到结构推理认知系统中,继而将其内化到自身的知识体系当中。经多轮活动,学生可自主选择将习得的结构化知识转化为新的直觉经验,并存储到直觉经验认知系统当中,形成直觉经验与结构知识双向建构的闭环体系。
(三)智慧学习环境下的具身交互模型

本研究依托具身交互中“身体在场的体验性交互和身体、大脑、环境协同参与的建构性交互”的本质内涵、具身交互模型的设计理念和“经验认知-感知-行动-反思-推理认知”的行动机制,融合智慧学习环境中数据、模型、资源、工具与服务等要素功能,构建智慧学习环境下以学为中心的具身交互模型(简称RBAP模型),如下页图2所示。RBAP模型主要包括交互主体、交互内容、交互层级与环境支持4类信息。
1.交互主体与交互内容
RBAP模型的交互主体为教学主体与智慧学习环境各要素。交互内容包括被动感知交互(Passive Perceptual Interaction)、主动感知交互(Acquired Perceptual Interaction)、行动交互(Behavioral Interaction)与反思交互(Reflective Interaction),分别对应学生与资源的直接或间接交互、学生与他者(工具/主体)的交互、学生与概念的交互。
被动感知交互属于意向具身,发生在个体学习环境中。学生通过被动感知教师的输出信息,激活身体的知觉经验和情绪体验,实现学生与资源的单向交互。一方面,学生通过观看教师演示工具、展示资源、撰写板书等动作行为,激活学生的知觉经验和情绪体验。另一方面,学生通过倾听教师讲授、师生对话等言语行为,激活学生的映射关系经验。
主动感知交互属于意向具身,发生在个体学习环境中。学生通过自主操控主动感知信息,唤醒学生的知觉经验和情绪体验,实现学生与资源的直接或间接交互。一方面,学生基于教师的指令性言语转换教与学的方式,通过眼部注视观察与点击浏览资源,实现学生与资源的直接交互。另一方面,学生自发产生的语言与非语言行动会得到来自教师、同伴、工具的反馈,如教师或同伴的采纳观点、口头表扬、行动指示,工具对行为正误的反馈等信息。学生通过主动感知上述反馈信息,指导xr4OFQlFDCA+DMCuD73QqA==下一步行动的开展,实现学生与资源的间接交互。
行动交互属于物理具身,发生在个体学习环境和群体学习环境中。学生基于外显工具支架开展基于身体动作的探究、讨论等行为,实现学生与工具的人机交互、学生与主体的人际交互。一方面,基于主体的身体结构和身体动作开展触摸、闻嗅、摆放、涂抹、姿态等人机交互行为,调动学生的身体参与、延伸身体体验并建立新的映射关系。另一方面,基于师生问答互动、生生的讨论协商等人际交互行为,调动学生的社会参与、唤醒情绪体验。
反思交互发生在个体学习环境和群体学习环境中。基于教师引导或工具提示,支持学生反思自身经验或他人反馈结果,实现学生与概念交互。一方面,教师引导学生开展评价反馈,评价学习要点、整合学习观点、反思学习效果。另一方面,教师通过发布并展示学习任务单中实验设计、概念图绘制等任务结果,掌握学生的认知卸载与知识迁移程度。
2.交互层级与环境支持
具身交互程度通常按照身体参与由低到高的顺序被划分为观察、操控、感知、化身四类。王辞晓等依托上述具身交互程度的划分标准,将虚拟学习环境的具身交互行为按其程度高低划分为:替代交互<控件交互<涉身交互<全身交互[37]。替代交互是指学生通过观察视频资源支持身体参与,开展基于观察的单向交互,对应RBAP模型中被动感知交互。控件交互是指学生通过键盘与鼠标等工具支持身体参与,开展基于操控的主动交互,对应主动感知交互。涉身交互是指学生通过手持设备、触控设备或交互手柄等手势识别设备,调动身体的肢体动作参与,开展基于小幅度身体动作的触控交互,对应行动交互。全身交互是指学生通过可穿戴设备,调动身体姿态参与,开展基于大幅度身体动作的沉浸/化身交互,对应行动交互。值得注意的是,具身交互不仅是身体在场的体验性交互活动,而且是身体、大脑、环境协同参与的建构性交互活动。这意味着身体参与的范围与动作幅度的大小并非是判断具身交互程度的唯一决定性因素。本研究将身体-大脑-环境的协同调动程度作为判断高具身交互程度的标准之一。RBAP模型中反思交互旨在智慧学习环境的要素支持下,引导学生开展对感知-行动结果的反思,该活动调动了大脑、身体与环境的协同参与,被视为最高具身程度的交互。本研究按由低到高的顺序将具身交互层级划分为Passive 智慧学习环境往往依托资源与工具要素调动身体在场的程度,支持具身交互内容及其功能实现。本研究依托上述具身交互层级的分类标准,将智慧学习环境划分为单向式学习环境、点击式学习环境、触控式学习环境和沉浸式学习环境四类,分别支持RBAP模型中不同的具身交互内容。(1)单向式学习环境中,网络技术、智慧黑板等演示类工具和数字资源的配置,为学生提供低具身程度的交互,激活学生的身体知觉经验在场,支持被动感知交互、行动交互中人际交互、反思交互等活动。(2)点击式学习环境中,网络与交互式技术、电脑键鼠套装、学科工具等增强型工具和数字资源的配置,为学生提供较低具身程度的交互,激活学生的身体知觉经验在场,支持被动感知交互、主动感知交互、行动交互中人机单向交互与人际交互、反思交互等活动。(3)触控式学习环境中,触控技术或手势识别技术、平板或交互式手柄等调整型工具与交互式资源的配置,为学生提供中等具身程度的交互,激活学生的身体知觉经验、小幅度身体动作(如手势动作)和身体意义在场,支持被动感知交互、主动感知交互、行动交互中人机双向触控交互与人际交互、反思交互等活动。(4)沉浸式学习环境中,VR/ AR/MR等可穿戴设备或增强现实展台等重构型工具和虚拟现实、增强现实等体验式资源的配置,为学生提供高具身程度的交互,激活身体知觉经验、大幅度身体动作和身体意义在场,支持被动感知交互、主动感知交互、行动交互中人机双向沉浸交互与人际交互、反思交互等活动。 智慧学习环境下RBAP模型突破了笛卡尔身心二元论的限制,既可基于“身体在场”和“身体-大脑-环境协同参与”的本质特征和智慧学习环境的要素功能,支持学生个体开展体验性交互和建构性交互活动,又能支持学生与其他主体以共在的状态和社会实践的方式开展人机与人际等社会性交互活动,摆脱现象学中唯我论的困境,达成认知的客观性和普遍共享的实在性理念[38]。然而,如何基于智慧学习环境下RBAP模型指导具身交互活动资源的设计、具身交互教学的应用、具身交互程度的诊断和效果检验,均是未来研究亟待研究的话题。 参考文献: [1] 怀进鹏.深入贯彻党的二十大精神, 纵深推进教育数字化战略行动[N].中国教育报,2022-10-25(11). [2] 陈丽.远程教学中交互规律的研究现状述评[J].中国远程教育,2004,(1): 13-20+78. [3] 韩琴,周宗奎,胡卫平.课堂互动的影响因素及教学启示[J].教育理论与实践,2008,(16):42-45. [4] 张良.论具身认知理论的课程与教学意蕴[J].全球教育展望,2013,42(4): 27-32+67. [5] 李栋.从缺席到主场:身体的境况与课程知识教学[J].中国电化教育,2023,(4):16-22+31. [6] Dreyfus H L.The current relevance of Merleau-Ponty’s phenomenology of embodiment [J].The electronic journal of analytic philosophy,1996,4(4):1-16. [7] Alban M W,Kelley C M.Embodiment meets metamemory:weight as a cue for metacognitive judgments [J].Journal of Experimental Psychology:Learning, Memory,and Cognition,2013,39(5):1628. [8] [丹]丹·扎哈维著.李忠伟译.胡塞尔现象学[M].北京:商务印书馆,2022. 131-135. [9] 华鸿燕.隐喻性话语取象的具身认知研究[D].重庆:西南大学,2019. [10] [法]莫里斯·梅洛-庞蒂.姜志辉译.知觉现象学[M].北京:商务印书馆,2001.116-130. [11] Mooney T.Phenomenology of perception [J].International Journal of Philosophical Studies,2012,20(4)tRoBLTzHL/yosKVjMWOCSQ==:589-594. [12] Beavers,A.F.The Phenomenological Mind:An Introduction to Philosophy of Mind and Cognitive Science [J].Philosophical Psychology,2009,22(4):533-537. [13] 赵瑞斌,张燕玲等.智能技术支持下具身学习的特征、形态及应用[J].现代远程教育研究,2021,33(6):55-63+83. [14] 唐佩佩,叶浩生.作为主体的身体:从无身认知到具身认知[J].心理研究,2012,5(3):3-8. [15] [智]F.瓦雷拉,[加]E.汤普森,[美]E.罗施.李恒威,李恒熙等译.具身心智:认知科学和人类经验[M].杭州:浙江大学出版.2010.139-142. [16] 王辞晓.具身认知的理论落地:技术支持下的情境交互[J].电化教育研究,2018,39(7):20-26. [17] Dourish P.Where the action is:The Foundations of Embodied Interaction [M]. London:MIT press,2001.100-126. [18] Shah H,Warwick K,Vallverdú J,et al.Can machines talk Comparison of Eliza with modern dialogue systems [J].Computers in Human Behavior,2016,58:278-295. [19] 刘革平,高楠等.教育元宇宙:特征、机理及应用场景[J].开放教育研究,2022,28(1):24-33. [20] 沈湘平.我身何是 我知何识 我心何属 —中国人学研究需直面当代三问[J].江海学刊,2022,(1):64-72. [21] Black J.An Embodied/Grounded Cognition Perspective on Educational Technology [J].New Science of Learning, 2010,3:45-52. [22] Abrahamson D,Trninic D.Bringing forth mathematical concepts: Signifying sensorimotor enactment in fields of promoted action [J].ZDMMathematics Education,2015,47:295-306. [23] Abrahamson D,Abdu R.Towards an ecological-dynamics design framework for embodied-interaction conceptual learning:The case of dynamic mathematics environments [J].Educational Technology Research and Development,2021,69:1889-1923. [24] 王辞晓.具身设计:在感知运动循环动态平衡中发展思维——访美国具身认知领域著名专家多尔·亚伯拉罕森教授[J].现代远程教育研究,2019,(2):3-10. [25] 叶浩生.认知与身体:理论心理学的视角[J].心理学报,2013,45(4):481-488. [26] Gallese V.Before and below ‘theory of mind’: embodied simulation and the neural correlates of social cognition [J].Philosophical Transactions of the Royal Society B: Biological Sciences,2007,362(1480):659-669. [27] 冯永刚,吕鑫源.智能教育背景下学生身体的退隐与回归[J].中国电化教育,2023,(9):34-40+49. [28] [美]R.keith Sawyer.徐晓东,杨刚等译.剑桥学习科学手册(第二版)[M].北京:教育科学出版社.2021.373-387. [29] 范文翔,赵瑞斌.具身认知的知识观、学习观与教学观[J].电化教育研究,2020,41(7):21-27+34. [30] 郑旭东,王美倩等.论具身学习及其设计:基于具身认知的视角[J].电化教育研究,2019,40(1):25-32. [31] 钟柏昌,刘晓凡.论具身学习环境:本质、构成与交互设计[J].开放教育研究,2022,28(5):56-67. [32] 陈丽.远程学习的教学交互模型和教学交互层次塔[J].中国远程教育,2004,(5):24-28+78. [33] 胡翰林,沈书生.生成认知促进高阶思维的形成—从概念的发展谈起[J].电化教育研究,2021,42(6):27-33. [34] 黄红涛,孟红娟等.混合现实环境中具身交互如何促进科学概念理解[J].现代远程教育研究,2018,(6):28-36. [35] Jackson P.Theorising embodied interaction in coaching:A Merleau-Pontian perspective on embodied practice [J].Theory & Psychology,2023,33(1):78-98. [36] 武法提,杨重阳等.智慧学习环境中的人机协同设计[J].电化教育研究,2024,45(2):84-90. [37] 王辞晓,李睿玉等.虚拟实验具身程度及其对学习成效的影响[J].开放教育研究,2022,28(5):93-104. [38] [德]胡塞尔著.张廷国译.笛卡尔式的沉思[M].北京:中国城市出版社,2001.4-162. 作者简介: 杨重阳:讲师,博士,研究方向为智慧学习环境设计、具身交互教学设计理论。 武法提:教授,博士生导师,研究方向为智能学习系统与智慧学习环境设计。 Embodied Interaction: The Theory of Interaction in Body Presence Based on Smart Learning Environment Yang Chongyang1,3, Wu Fati2,3 1.School of Educational, Hebei Normal University, Shijiazhuang 050024, Hebei 2.School of Educational Technology, Beijing Normal University, Beijing 100875 3.Engineering Research Center of Digital Learning and Educational Public Service, Ministry of Education, Beijing Normal University, Beijing 100875 Abstract: In smart learning environment, the meaning of body is missing in teaching interaction, which poses a significant challenge to teaching reform. The presence of the body has become a core breakthrough in teaching reform. Based on the development of phenomenological philosophy, this study first traces the theoretical system of body presence, interprets the focus of body presence in phenomenology, cognitive science, interactive system design, and educational metaverse. And then, we extract the embodied essence of “body presence” from it. Secondly, this study relies on the evolutionary path of embodiment, the theoretical system of body presence is reconstructed from the perspective of interaction, namely embodied interaction theory. This theory holds the view of “the body participates in meaning construction”and the dynamic mechanism of the cycle of “perception-behavior-reflection”. It supports the collaborative participation of the body, brain, and environment in meaning construction, and shows the characteristics of “perception based on the body, perception for behavior, and behavior comes with meaning”. Finally, by integrating the advantages of teaching interaction model and embodied interaction model, combining the essential and dynamic mechanism of embodied interaction, the design principles and action mechanism of embodied interaction are generated, and the RBAP model consisting of “passive perceptual interaction, acquired perceptual interaction, behavioral interaction, and reflective interaction” is constructed. The content and interaction relationship of the four elements are clarified, and the supporting of smart learning environment for embodied interaction are summarized, to facilitate the identification of embodied interaction behavior, the development of embodied interaction instructional design, and the evaluation of the effects of embodied interaction. Thereby breaking through the theoretical barriers to achieve normalized application. Keywords: smart learning environment; phenomenology; body presence; embodied interaction; RBAP model 收稿日期:2023年10月16日 责任编辑:赵云建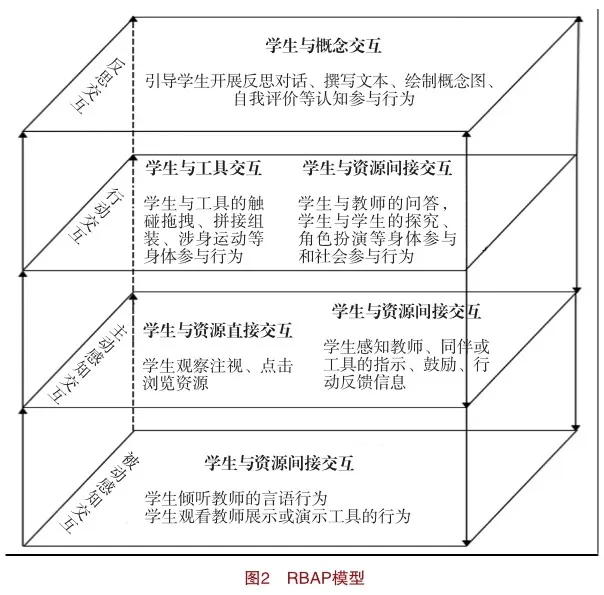
五、结语