
应用于空中平台主动防御作战轨迹预测过程的状态估计方法研究
2024-09-25 00:00:00吕明远吴震乔要宾
航空兵器 2024年4期










摘 要:从主动防御的实际作战需求入手, 分析轨迹预测不同方法的优缺点及使用场景, 分析空中平台主动防御作战场景相较于目前主要研究的其他飞行器轨迹预测场景的区别, 针对该场景下轨迹预测对象特殊的攻击意图和运动规律提出一种基于扩展卡尔曼滤波的状态估计方案。 基于仿真软件模拟了攻击弹以比例导引攻击载机的过程, 以满足比例导引系数不变的条件建立观测模型, 采用扩展卡尔曼滤波为非线性的模型进行线性化仿真, 观测到不同时刻攻击弹的运动状态, 并以此进行短时间的轨迹预测。 仿真结果表明, 该模型在主动防御作战场景下能显著减小状态估计误差。
关键词:空空导弹; 主动防御; 三体对抗; 轨迹预测; 状态估计; 扩展卡尔曼滤波
中图分类号: TJ765.4
文献标识码: A
文章编号:1673-5048(2024)04-0041-08
DOI: 10.12132/ISSN.1673-5048.2023.0251
0 引 言
目前, 空中平台主要依靠逃逸机动、 电磁干扰等手段应对敌方空空导弹的威胁, 然而在存在干扰的情况下, 空空导弹的命中率仍能达到50%~60%, 亟待发展新的防御手段来提升空中平台的生存能力。 欧美已经开始发展拦截来袭导弹的空中平台主动防御技术[1-2], 通过“硬杀伤”的手段对来袭导弹进行拦截。 来袭空空导弹的飞行马赫数能够达到3以上, 拦截弹与目标的交会马赫数可以达到6~7, 需要迎头小角度交会才能形成有效的毁伤时间窗口[3]。 因此, 空中平台拦截弹需要在保证制导精度的同时, 满足末端弹目交会角度约束。
目标的识别和状态估计过程存在误差, 而且空空导弹具备较高的机动能力, 机动过载最高可达50g[4], 传统的制导方法直接将拦截对象作为跟踪目标进行交会角度约束制导时, 需要频繁变更过载大小及方向, 又因为观测误差和目标机动的影响, 实时保持约束跟踪目标对能量的消耗很大, 且很难实现交会角约束, 因而目前交会角约束制导律的研究多为通过轨迹预测得到虚拟目标或虚拟碰撞点通过跟踪虚拟对象的方法进行制导律设计[5-9], 或在目标运动状态可预测的前提下[10]使用最优制导[11-13], 以满足约束条件并减小脱靶量和能量消耗。 实际情况下, 对来袭导弹的探测过程存在各种噪声, 因此减小噪声影响并准确预测来袭导弹的运动轨迹, 是空中平台主动防御武器制导律设计的重要条件。
目前关于飞行器轨迹预测的研究对象多为飞机、 弹道导弹和高超声速飞行器等, 针对空空导弹轨迹预测研究较少。 本文针对空中平台主动防御作战场景, 结合现有其他场景下轨迹预测的研究方法, 提出一种基于扩展卡尔曼滤波的来袭导弹空空导弹状态估计模型, 并通过仿真验证了方法的有效性。
1 轨迹预测方法与场景的分析
飞行器轨迹预测方法设计主要分为三步[14]: (1)识别目标的运动特征; (2)跟踪目标的运动状态; (3)根据目标运动状态外推进行轨迹预测, 同时根据目标信息是否透明分为合作型目标和非合作型目标。
识别目标运动特征, 意在减小目标轨迹预测的范围, 精确化轨迹预测的模型。 目前的研究方案分为3种: 基于计算流体力学模型的分析[15-16]、 基于风洞试验模型的分析[17]、 基于动力学方程和运动方程的目标轨迹分析[18-19]。 前两种方案属于针对合作型目标的运动特征识别方法, 第三种方案属于针对非合作型目标的运动特征识别方法。 作为非合作型目标, 空空导弹类目标受力复杂且动力充足, 基于运动学方程和运动方程的目标运动特征分析更具可行性。
目标运动状态估计分为两类, 以动力学模型为基础的状态估计和以运动学模型为基础的状态估计。 基于动力学模型的状态估计常用于空间飞行器的状态估计研究, 因为目标机动能力较弱, 受力分析相较于其他场景较为简单。 基于运动学模型的状态估计多用于存在特定运动规律的目标, 其本质是针对目标运动进行统计学分析而总结出目标的机动规律。 基于观测过程中引入干扰的不同分为白噪声模型和有色噪声模型, 本文研究的白噪声问题模型为恒定加速度模型(Constant Acceleration, CA)[20]和匀速转弯模型(Constant Turn, CT)[21]。 这两种模型分别把目标运动视为瞬时的匀加速运动和匀速圆周运动, 通过卡尔曼滤波等方法将观测数据拟合到对应的运动轨迹中减小噪声影响, 估计出较为准确的状态信息和运动规律。 虽不同于飞机类目标存在特定运动模式(CA, CT), 空空导弹的运动服从特定制导律的控制, 理论上仍可通过运动学模型进行状态估计。
目标轨迹的预测方法有解析法、 几何法和数值积分法3种类型。 解析法用于机动能力弱或无机动能力的目标, 如弹道导弹被动段[22], 通过带入状态信息到特殊的函数里得到准确的预测结果, 而在目标机动能力较强的情况下无法得到准确的解析解。 几何法通过对目标的运动轨迹进行分析, 使其拟合于一条特定的曲线[23]。 该方法计算速度快、 短时精确度高、 长时间的精确度根据不同研究场景差异度不同。 数值积分法用于合作类目标或信息透明度很高的非合作目标。 该方法需要对目标进行精确的运动模型建模分析, 以及准确的发动机动力和气动力分析, 并对其加速度进行积分[24], 而在拦截作战场景下预测目标的气动参数无法获取, 故无法进行精确计算, 该方法局限性较大。 除此之外, 随着计算机科技的发展, 人工智能算法也被逐步应用到飞行器轨迹预测领域, 如神经网络和深度学习等方法[25-26], 但均需要大量的历史数据作为支撑, 且对目标大机动场景预测效果一般的同时, 很难满足快速性的需求。
目前关于轨迹预测的研究中, 针对第三步轨迹预测的研究方法有很多, 但或是基于目标当前运动状态完全已知的假设, 或是在第二步状态估计过程使用了基于卡尔曼滤波的CA或CT简单模型或多模型融合进行状态估计, 并没有从观测模型本身进行改进。 目标状态估计的准确性作为轨迹预测的前置条件的同时, 还直接决定了制导律设计时脱靶量的理论最小值。 本文针对状态估计过程中的卡尔曼滤波模型, 结合空中平台主动防御作战的特点, 设计出符合该场景下运动特征的状态估计模型。
空中平台主动防御问题也称为三体对抗(Target- Attacker-Defender, TAD)问题, 最早由Boyell提出[27], 该场景由攻防两方至少三个或以上的飞行器组成, 即攻击弹(Attacker, A)以防御方空中平台(Target, T)为目标进行攻击, 防御方空中平台以逃逸为目标, 防御方拦截弹(Defender, D)以拦截攻击方空空导弹为目标。 该场景有如下几个特点:
(1) 大多数空空导弹发动机工作时间为10 s左右, 最多不超过30 s, 有效作战半径在百公里内[28], 因此空中平台主动防御作战时间较短, 针对来袭导弹的作战意图分析相比于飞机、 弹道导弹、 超高声速飞行器类目标更为精确, 同时目标作战意图明确, 即攻击我方载机。
(2) 攻击弹机动能力强且为非合作目标, 无法应用解析法和数值积分法进行预测。 比例导引律控制下的攻击弹(空空导弹和面空导弹)运动与我方载机的运动具有强相关性。
(3) 载机是合作飞行器, 我方载机未来的飞行轨迹是可控制和可预测的。
在主动防御作战过程中, 攻击弹的位置信息观测结果由空中平台、 防御方拦截弹和预警机等多个平台数据融合得到, 观测误差较为复杂。 为方便研究, 本文将融合后的位置信息噪声简化为纵横坐标上满足高斯分布的白噪声。 基于以上特点, 针对目标观测过程中的白噪声, 本文提出一种在轨迹预测过程中引入我方载机位置信息的预测模型, 即基于扩展卡尔曼滤波的导航比(Constant Proportional Navigation Ratio, CPNR)固定的运动学预测模型。
不同于传统的以拦截目标作为轨迹预测过程单一研究对象的预测方案, 本文使用一种新的状态估计模型。 其核心思想是将载机运动信息和攻击弹位置观测信息同时作为已知信息进行输入, 考虑到观测过程引入的位置信息噪声, 借由载机运动与攻击弹运动的高度耦合性以减小状态估计和轨迹预测过程的误差。 将载机与攻击弹的相对运动信息通过扩展卡尔曼滤波线性化拟合到比例导引轨迹上, 对观测环节引入的白噪声进行滤波, 得到其运动状态和运动规律(导航比), 并通过载机未来的运动趋势来预测攻击弹的运动轨迹。
2 轨迹预测算法
2.1 状态估计模型
本文使用二维简化模型, 假设载机T的运动和来袭导弹A的运动发生在同一攻击平面内。 假设攻击弹的控制环节无延迟, 其姿态始终朝向速度方向, 且加速度始终与速度方向垂直, 即速度模值保持不变, 以导航比不变的比例导引律追击我方载机。 坐标系选取地面坐标系, 坐标原点设在攻击弹在地面的投影处, 如图1所示。
在主动防御作战时, 进攻方攻击弹的导航比对于防御方来说是未知的, 因此选取如下状态变量: x1为攻击弹在x轴上的坐标; x2为攻击弹在z轴上的坐标; x3为攻击弹的速度角; x4为攻击弹的速度模值; x5为攻击弹的导航比。
主动防御作战场景中载机为合作单位, 空战机动动作基本固定, 因而其短时间内的运动状态完全透明且可预知, 因此其位置信息可以作为轨迹预测过程的输入变量, 即u1为载机在x轴上的坐标; u2为载机在z轴上的坐标; 而攻击弹在坐标轴上的真实位置为输出变量, 即y1为攻击弹在x轴上真实位置; y2为攻击弹在z轴上真实位置。
假设离散系统的采样周期为Ts, 其速度角θA和弹目视线角qA状态满足以下关系:
θA, k-θA, k-1=N(qA, k-1-qA, k-2)(1)
即
x3, k=x3, k-1+x5(qA, k-1-qA, k-2)(2)
其中, qA, k=arctanu2, k-x2, ku1, k-x1, k。
攻击弹运动学Xk=f(Xk-1, Uk-1)方程为
Xk=Xk-1+x4, k-1cos(x3, k-1)Tsx4, k-1sin(x3, k-1)Tsx5, k-1(qA, k-1-qA, k-2)00(3)
Yk=1000001000Xk(4)
2.2 扩展卡尔曼滤波轨迹预测
2.2.1 运动参数估计
防御方观测到的攻击弹在坐标轴上的位置设置为: z1为攻击弹在x轴上观测位置; z2为攻击弹在z轴上观测位置; v1为x轴上观测过程引入的服从N(0, r1)的误差值; v2为x轴上观测过程引入的服从N(0, r2)的误差值。
z1=y1+v1z2=y2+v2 (5)
攻击弹的非线性系统状态估计方程表达式为
Zk=HXk-1+VkXk=f(Xk-1, Uk-1) (6)
(1) 先验估计
X^-k=f(X^k-1, Uk-1)
P-k=AkPk-1ATk (7)
式中: X^-k和P-k分别为状态变量和状态协方差矩阵的先验估计值; Ak矩阵为雅可比矩阵, 即
Ak=JF(x1, x2, x3, x4, x5)|X=
(x^1, k, x^2, k, x^3, k, x^4, k, x^5, k)T=
10x1x3x1x4001x2x3x2x40x3x1x3x210x1x50001000001|X=X^k-1(8)
代入X=X^k-1, 矩阵各元素如下:
x1x3|(X=X^k-1)=-x^4, k-1sin(x^3, k-1)Ts
x1x4|(X=X^k-1)=cos(x^3, k-1)Ts
x2x3|(X=X^k-1)=x^4, k-1cos(x^3, k-1)Ts
x2x4|(X=X^k-1)=sin(x^3, k-1)Ts
x3x1|(X=X^k-1)=x^5, k-1(u2, k-1-x^2, k-1)(u1, k-1-x^1, k-1)2+(u2, k-1-x^2, k-1)2
x3x2|(X=X^k-1)=-x^5, k-1(u1, k-1-x^1, k-1)(u1, k-1-x^1, k-1)2+(u2, k-1-x^2, k-1)2
x3x5|(X=X^k-1)=arctanu2, k-1-x^2, k-1u1, k-1-x^1, k-1-
arctanu2, k-2-x^2, k-2u1, k-2-x^1, k-2 (9)
(2) 后验估计
Kk=PkHT(HPkHT+R)-1
X^k=X^-+Kk(Zk-HX^-)
Pk=(I-KkH)P-k(10)
式中: Kk为卡尔曼增益; X^k, Pk分别为状态后验估计值和协方差矩阵; R为观测噪声协方差矩阵, R=r100r2; H为观测矩阵, H=1000001000。
2.2.2 轨迹预测
本文使用的轨迹预测方法, 属于几何法的范畴。 在迭代计算出攻击弹的运动参数后, 将运动参数和我方载机未来的位置信息代入运动方程(3)和(4)中进行多次迭代, 预测出一段时间以后的坐标轴位置。
3 仿真实验
3.1 仿真条件
初始时刻, 载机位于坐标轴(20 000, 10 000)点, 攻击弹位于(0, 8 000)点。 载机保持水平向x轴负方向以300 m/s速度匀速直线飞行, 攻击弹初始速度角为15°, 保持速度为1 000 m/s, 以比例系数为3的比例导引追击载机, 其控制系统不存在时间延迟, 仿真步长选择Ts=0.001 s, 仿真过程中忽略重力作用。 根据式(3)~(4)仿真得到导弹追击载机的轨迹图, 如图2所示。 导弹全机动过程的过载如图3所示。
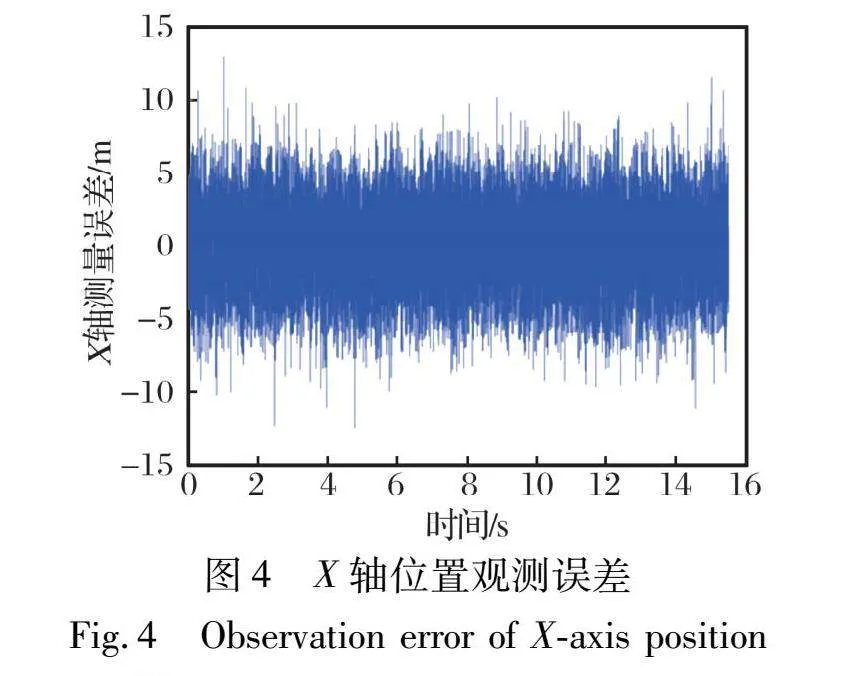
假设只存在观测噪声而不存在过程噪声, 观测值为攻击弹的纵横坐标位置, 观测噪声为均值0方差9的高斯噪声。 观测误差如图4~5所示。
3.2 仿真数据
3.2.1 技术指标
假设载机最大可承受过载为5g, 载机在6 s时由原有的直线运动转为向上做最大过载下的筋斗动作。 假设预计10 s时完成拦截, 在6 s时防御方拦截弹已经形成迎头攻击态势。 防御方拦截弹将根据剩余时间的变化同步减少轨迹预测时间, 以更新预计碰撞点最终在载机机动后的真实碰撞点完成拦截。 在此过程中, 脱靶量理论最小值同时受制于长时间的预测误差和预计命中时间的目标状态估计误差。
以6 s为仿真开始时间, 对攻击弹未来4 s的真实轨迹与预测轨迹进行仿真, 仿真轨迹包括载机维持原有运动状态的情况下6~10 s过程中攻击弹真实的运动轨迹、 载机机动状态改变的情况下6~10 s过程中攻击弹真实的运动轨迹、 6 s时以载机运动状态未改变为假设得到的未来4 s的攻击弹预测轨迹。 在载机运动状态改变的瞬间会造成攻击弹真实轨迹与运动状态未改变时含误差的预测轨迹之间产生较长距离的偏移。 为了保证4 s后防御方拦截弹能够准确命中攻击弹, 轨迹预测的误差存在一个可初步计算的指标。
拦截过程的示意图如图6所示。
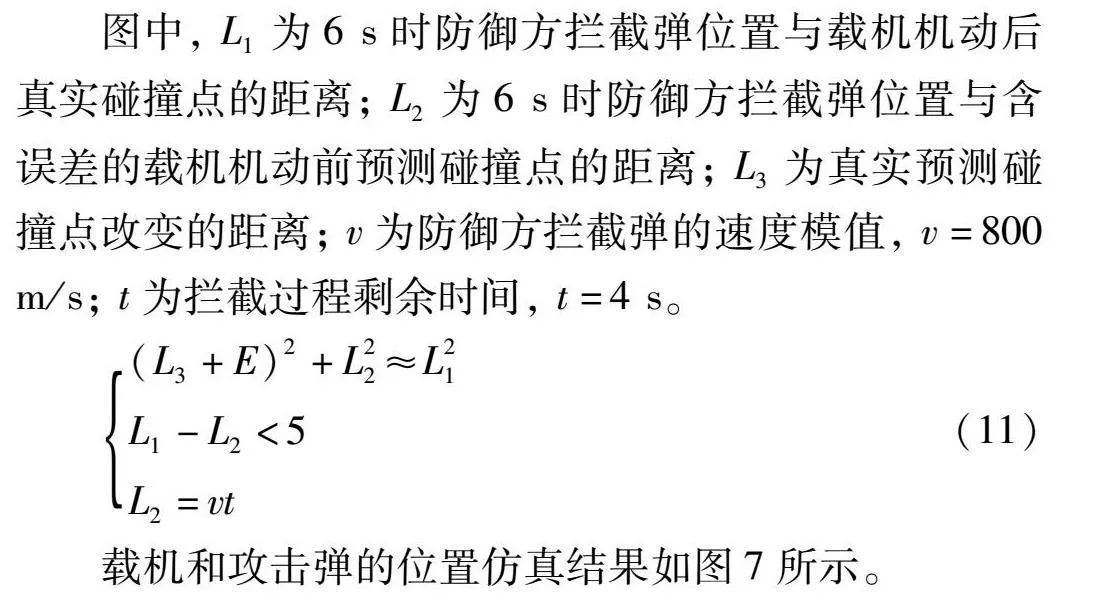
图中, L1为6 s时防御方拦截弹位置与载机机动后真实碰撞点的距离; L2为6 s时防御方拦截弹位置与含误差的载机机动前预测碰撞点的距离; L3为真实预测碰撞点改变的距离; v为防御方拦截弹的速度模值, v=800 m/s; t为拦截过程剩余时间, t=4 s。
(L3+E)2+L22≈L21L1-L2<5L2=vt (11)
载机和攻击弹的位置仿真结果如图7所示。
由仿真结果可得真实碰撞点的坐标(7 791.0, 9 779.9), 载机未机动时准确预测碰撞点的坐标(7 808.4, 9 673.5), 将位置坐标信息代入到式(11)中求得E的限制条件, 得到在此场景下6~10 s进行对攻击弹的拦截, 则脱靶量小于3 m的前提是, 需保证4 s预测时间间隔的预测误差E<30.7 m, 且预计命中点位置估计误差小于3 m。
3.2.2 仿真结果
目前, 以导弹为轨迹预测对象的多模型预测算法中去除高斯分布观测噪声时, 常用的模型为CA和CT模型, 其中CA模型为线性滤波模型, CT模型为非线性滤波模型。 因整个过程中攻击弹的运动规律并未发生改变, 故本文将CPNR模型直接与CA和CT模型进行对比。
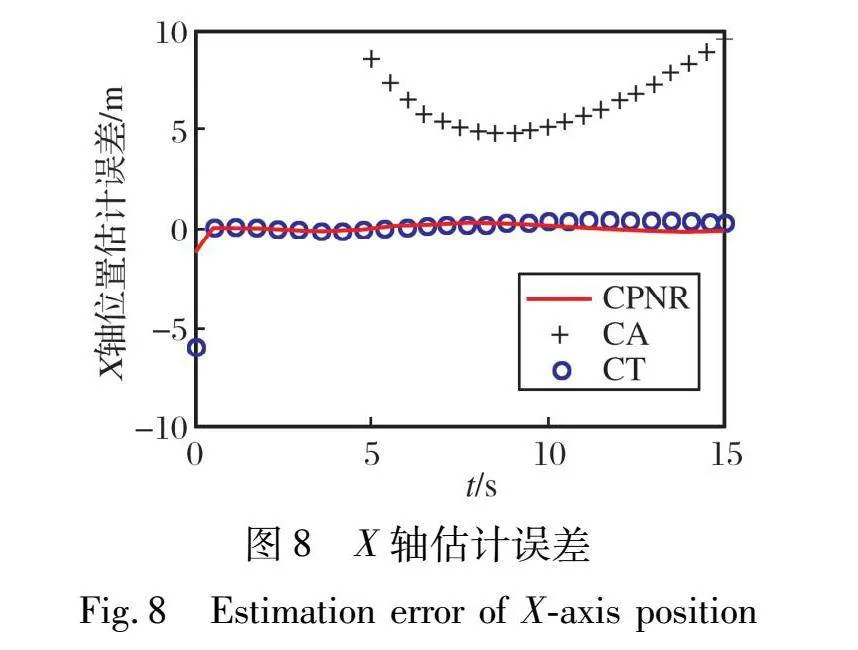
将攻击弹位置观测值代入到式(7)和式(10)中实时迭代, 进行对攻击弹各个状态变量的估计, 其位置与速度状态估计值误差与CA和CT模型状态估计误差的对比如图8~11所示。 导航比估计值如图12所示。
由图8~12可知, 导航比固定的扩展卡尔曼滤波可以很好地跟踪攻击弹的运动状态。
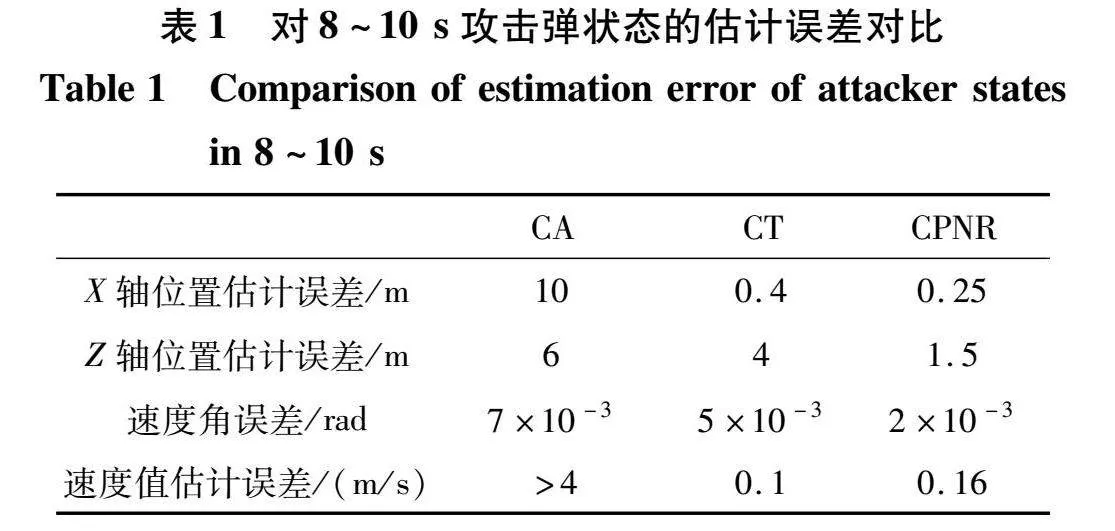
一般情况下, 防御方拦截弹速度略小于攻击弹, 以防御方拦截弹的发射时间为起点, 攻击弹预计命中载机时间为终点, 拦截过程发生在攻击过程的后半段。 在假设的仿真条件下, 攻击弹将于15 s以后命中载机, 因此将拦截时间假设为8~10 s之间, 此时三种模型的状态估计误差对比如表1所示。
由表1可知, 在本文仿真假设条件下, 使用CT模型对攻击弹进行状态估计时, 位置误差最大可达4 m, 此时防御方拦截弹的脱靶量很难控制在4 m以内, 而CPNR模型的位置估计误差远小于CA和CT模型, 最大脱靶量在1.5 m左右, 且速度角估计误差也小于另外两个模型, 这就决定了在进行第三步轨迹预测时会有更小的预测误差, 同时在碰撞角度约束时更加精确。
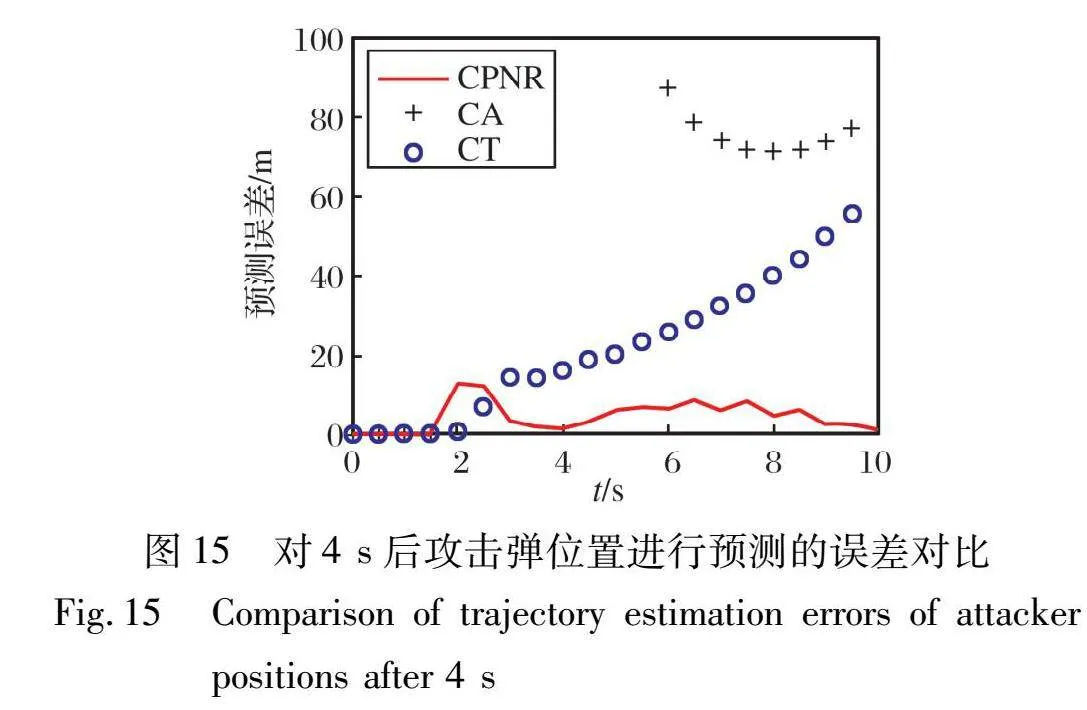
以每一时刻攻击弹的状态和未来几秒内载机的位置变化趋势为依据进行外推, 得到一定预测时间后的预测误差, 与CA和CT模型的预测结果进行对比, 得到不同预测时间下三种模型轨迹预测误差的对比图, 如图13~15所示。
图中, 纵坐标代表当前时间下对一定时长以后攻击弹轨迹进行预测的位置结果与对应时间后攻击弹真实位置的偏差, 预测过程均从0 s开始到11 s结束。
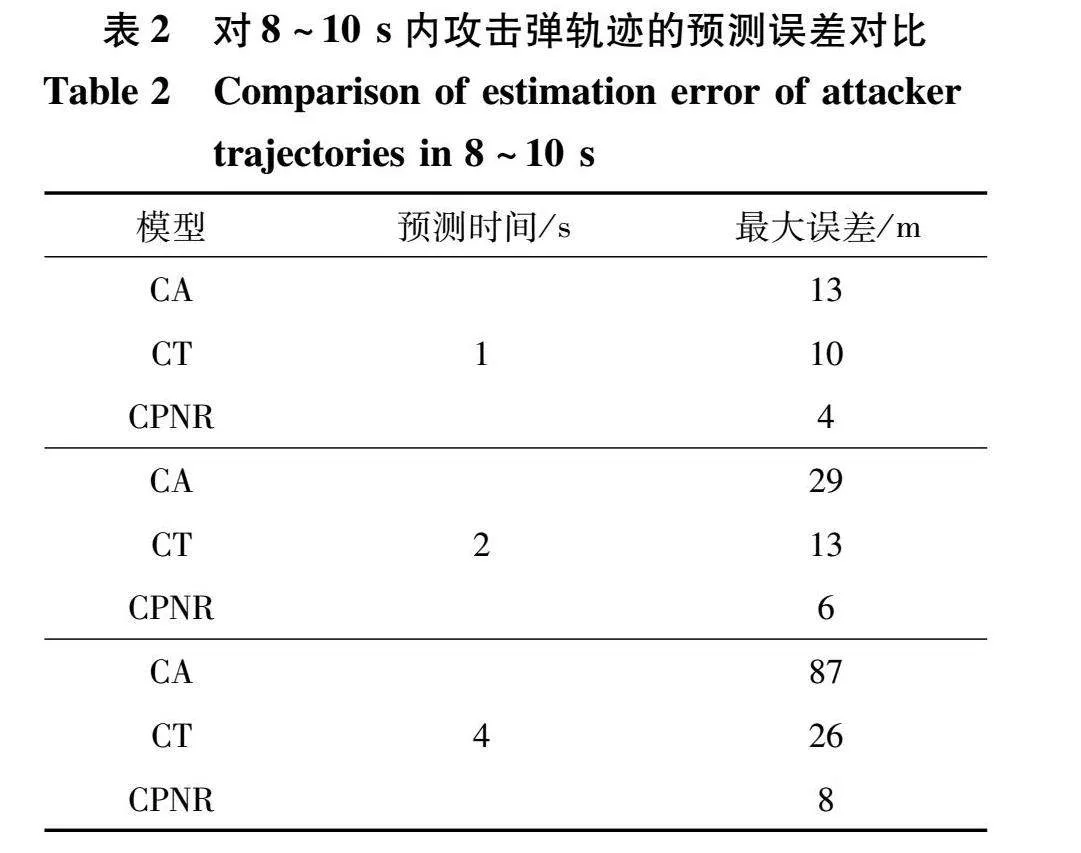
对比图13~15可知, 在不同的预测时间长度下, CPNR模型的预测误差均小于CT和CA模型。 将拦截时间假设为8~10 s之间, 分析对该时间段攻击弹的轨迹进行预测时产生的误差, 此时轨迹预测的误差数据分别为图13中7~9 s部分、 图14中6~8 s部分、 图15中4~6 s部分, 结果如表2所示。
由表2可知, 三种模型下对于短时间的轨迹预测都有较小的误差, 但是随着预测时间的增长, CA和CT模型的预测误差增大幅度远大于CPNR。 根据3.2.1节的推导结果, 在距离攻击弹到达预定碰撞点前4 s时间间隔的预测误差结果应小于30.7 m, 且预定碰撞点攻击弹的位置估计误差小于3 m, 才能保证防御方拦截弹在剩余时间内能够逐渐修正误差影响, 以较小的脱靶量命中目标。 在直接进行状态外推的情况下, CPNR模型也可满足拦截过程需要的条件。
4 结 论
本文对非线性的攻击弹与载机的运动关系进行研究, 基于扩展卡尔曼滤波设计了一种状态估计模型, 采用该状态模型对攻击弹攻击载机的过程进行仿真预测, 在引入相关载机位置信息的情况下, 能够很大程度上屏蔽掉观测过程中引入的高斯分布随机噪声的影响, 从而较为精确地得到攻击弹的运动状态和运动规律, 相比于常用的CA和CT模型有更小的估计误差, 可为轨迹预测的应用提供误差更小的状态估计值, 同时, 在直接用状态外推方法时预测效果也能满足拦截过程的脱靶量要求。
参考文献:
[1] 张蓬蓬, 张俊宝, 郭正玉. 第六代战斗机制空武器发展浅析[J]. 飞航导弹, 2021(12): 140-145.
Zhang Pengpeng, Zhang Junbao, Guo Zhengyu. Analysis on the Development of the Sixth Generation Combat Mechanism Air Wea-pon[J]. Aerodynamic Missile Journal, 2021(12): 140-145.(in Chinese)
[2] 段鹏飞. 空空导弹小/微型化发展趋势与启示[J]. 航空兵器, 2021, 28(3): 18-21.
Duan Pengfei. Development Trend of Air-to-Air Missile Micro Minia-turization[J]. Aero Weaponry, 2021, 28(3): 18-21.(in Chinese)
[3] 乔要宾, 吴震, 吕明远. 空中平台主动防御系统发展现状及关键技术[J]. 航空兵器, 2023, 30(2): 77-82.
Qiao Yaobin, Wu Zhen, Lü Mingyuan. Development Status and Key Technologies of Air Platform Active Defense System[J]. Aero Weaponry, 2023, 30(2): 77-82.(in Chinese)
[4] 介冲. AIM-120空空导弹发展综述[J]. 飞航导弹, 2015(3): 22-26.
Jie Chong. Summary of Development of AIM-120 Air-to-Air Missile[J]. Aerodynamic Missile Journal, 2015(3): 22-26.(in Chinese)
[5] Song T L, Shin S J, Cho H. Impact Angle Control for Planar Engagements[J]. IEEE Transactions on Aerospace and Electronic Systems, 1999,35(4):1439–1444.
[6] Padhi R, Kothari M. Model Predictive Static Programming: A Computationally Efficient Technique for Suboptimal Control Design[J]. International Journal of Innovative Computing Information & Control, 2009, 5(2): 399-411.
[7] 李辕, 赵继广, 白国玉, 等. 基于预测碰撞点的剩余飞行时间估计方法[J]. 北京航空航天大学学报, 2016, 42(8): 1667-1674.
Li Yuan, Zhao Jiguang, Bai Guoyu, et al. Method of Time-to-Go Estimation Based on Predicted Crack Point[J]. Journal of Beijing University of Aeronautics and Astronautics, 2016, 42(8): 1667-1674.(in Chinese)
[8] 李庚泽, 魏喜庆, 王社阳. 基于轨迹预测的高超声速飞行器拦截中/末制导研究[J]. 上海航天, 2017, 34(6): 7-12.
Li Gengze, Wei Xiqing, Wang Sheyang. Study on Trajectory Predicting and Midcourse/Terminal Guidance Against Hypersonic Vehicle[J]. Aerospace Shanghai, 2017, 34(6): 7-12.(in Chinese)
[9] 周池军, 李明杰, 雷虎民. 临近空间再入滑翔目标轨迹预测研究进展综述[J]. 飞航导弹, 2021(6): 127-132.
Zhou Chijun, Li Mingjie, Lei Humin. Review on the Research Progress of Near Space Reentry Gliding Target Trajectory Prediction[J]. Aerodynamic Missile Journal, 2021(6): 127-132.(in Chinese)
[10] 张浩, 张奕群, 张鹏飞. 三体对抗中的制导控制研究方法综述[J]. 战术导弹技术, 2021(1): 67-73.
Zhang Hao, Zhang Yiqun, Zhang Pengfei. A Survey of Guidance Law Design in Active Target Defense Scenario[J]. Tactical Missile Technology, 2021(1): 67-73.(in Chinese)
[11] Chen X T, Wang J Z. Optimal Control Based Guidance Law to Control both Impact Time and Impact Angle[J]. Aerospace Scien-ce and Technology, 2019, 84: 454-463.
[12] He S M, Lee C H, Shin H S, et al. Optimal Three-Dimensional Impact Time Guidance with Seeker’s Field-of-View Constraint[J]. Chinese Journal of Aeronautics, 2021, 34(2): 240-251.
[13] Li H Y, He S M, Wang J, et al. Near-Optimal Midcourse Gui-dance for Velocity Maximization with Constrained Arrival Angle[J]. Journal of Guidance, Control, and Dynamics, 2021, 44(1): 172-180.
[14] 刘滔, 雍恩米, 翟岱亮. 面向拦截的高超声速飞行器轨迹预测关键技术综述[J]. 航天控制, 2021, 39(4): 13-21.
Liu Tao, Yong Enmi, Zhai Dailiang. A Review of the Key Technologies of Trajectory Prediction of Intercepting Hypersonic Vehicles[J]. Aerospace Control, 2021, 39(4): 13-21.(in Chinese)
[15] 徐世南, 吴催生. 高超声速飞行器热力环境数值仿真研究综述[J]. 飞航导弹, 2019(7): 26-30.
Xu Shinan, Wu Cuisheng. Summary of Numerical Simulation Research on Thermal Environment of Hypersonic Vehicle[J]. Aerodynamic Missile Journal, 2019(7): 26-30.(in Chinese)
[16] 桂业伟, 刘磊, 魏东. 长航时高超声速飞行器的综合热效应问题[J]. 空气动力学学报, 2020, 38(4): 641-650.
Gui Yewei, Liu Lei, Wei Dong. Combined Thermal Phenomena Issues of Long Endurance Hypersonic Vehicles[J]. Acta Aerodynamica Sinica, 2020, 38(4): 641-650.(in Chinese)
[17] 赵忠良, 吴军强, 李浩, 等. 高机动导弹气动/运动/控制耦合的风洞虚拟飞行试验技术[J]. 空气动力学学报, 2016, 34(1): 14-19.
Zhao Zhongliang, Wu Junqiang, Li Hao, et al. Wind Tunnel Based Virtual Flight Testing of Aerodyanmics, Flight Dynamics and Flight Control for High Maneuver Missle[J]. Acta Aerodynamica Sinica, 2016, 34(1): 14-19.(in Chinese)
[18] 解国栋, 黄今, 杨建昌, 等. 一种导弹飞行轨迹运动参数计算方法[C] ∥第二届中国指挥控制大会, 2014.
Xie Guodong, Huang Jin, Yang Jianchang, et al. A Calculation Approach for Kinematics Parameters of Missile Trajectory[C] ∥The 2nd China Command and Control Conference, 2014.
[19] 宗群, 李智禹, 叶林奇, 等. 变信赖域序列凸规划RLV再入轨迹在线重构[J]. 哈尔滨工业大学学报, 2020, 52(3): 147-155.
Zong Qun, Li Zhiyu, Ye Linqi, et al. Variable Trust Region Sequential Convex Programming for RLV Online Reentry Trajectory Reconstruction[J]. Journal of Harbin Institute of Technology, 2020, 52(3): 147-155.(in Chinese)
[20] 史恒, 朱纪洪. 主动防御的最优预测协同制导律研究[J]. 空间控制技术与应用, 2019, 45(4): 64-70.
Shi Heng, Zhu Jihong. Optimal Cooperative Prediction Guidance Law for Active Defense[J]. Aerospace Control and Application, 2019, 45(4): 64-70.(in Chinese)
[21] 谢丽, 张军峰, 隋东, 等. 基于交互式多模型滤波算法的航迹预测[J]. 航空计算技术, 2012, 42(5): 68-70.
Xie Li, Zhang Junfeng, Sui Dong, et al. Aircraft Trajectory Prediction Based on Interacting Multiple Model Filtering Algorithm[J]. Aeronautical Computing Technique, 2012, 42(5): 68-70.(in Chinese)
[22] 孙瑜, 吴楠, 孟凡坤, 等. 考虑J2摄动的弹道导弹高精度弹道预报和误差传播分析[J]. 弹道学报, 2016, 28(2): 18-24.
Sun Yu, Wu Nan, Meng Fankun, et al. Analysis on High Precision Trajectory Prediction and Error Propagation of Ballistic Missile Considering J2 Perturbation[J]. Journal of Ballistics, 2016, 28(2): 18-24.(in Chinese)
[23] 袁震宇, 钟志通, 张林, 等. 导弹末端弹道拟合方法研究[J]. 舰船电子工程, 2015, 35(11): 52-54.
Yuan Zhenyu, Zhong Zhitong, Zhang Lin, et al. Missile Terminal Ballistic Curve Fitting Methods[J]. Ship Electronic Engineering, 2015, 35(11): 52-54.(in Chinese)
[24] 高策, 张淑梅, 赵立荣, 等. 基于数值积分法的弹道导弹落点实时预测[J]. 计算机测量与控制, 2012, 20(2): 404-406.
Gao Ce, Zhang Shumei, Zhao Lirong, et al. A Real-Time Forecast Method for Impact Point of Ballistic Missile Based on Numerical Methods of Integration[J]. Computer Measurement & Control, 2012, 20(2): 404-406.(in Chinese)
[25] 杨彬, 贺正洪. 一种GRNN神经网络的高超声速飞行器轨迹预测方法[J]. 计算机应用与软件, 2015, 32(7): 239-243.
Yang Bin, He Zhenghong. Hypersonic Vehicle Track Prediction Based on GRNN[J]. Computer Applications and Software, 2015, 32(7): 239-243.(in Chinese)
[26] 宋波涛, 许广亮. 基于LSTM与1DCNN的导弹轨迹预测方法[J]. 系统工程与电子技术, 2023, 45(2): 504-512.
Song Botao, Xu Guangliang. Missile Trajectory Prediction Method Based on LSTM and 1DCNN[J]. Systems Engineering and Electronics, 2023, 45(2): 504-512.(in Chinese)
[27] Boyell R. Defending a Moving Target Against Missile or Torpedo Attack[J]. IEEE Transactions on Aerospace and Electronic Systems, 1976, AES-12(4): 522-526.
[28] 任淼, 刘晶晶, 刘凯, 等. 2022年国外空空导弹发展动态研究[J]. 航空兵器, 2023, 30(4): 33-41.
Ren Miao, Liu Jingjing, Liu Kai, et al. Research on Foreign Air-to-Air Missiles’ Development in 2022[J]. Aero Weaponry, 2023, 30(4): 33-41.(in Chinese)
Research on State Estimation Method Applied to Trajectory
Prediction of Air Platforms Active Defense Operations
Lü Mingyuan1, Wu Zhen1, 2*, Qiao Yaobin1, 2
(1. China Airborne Missile Academy, Luoyang 471009, China;
2. National Key Laboratory of Air-based Information Perception and Fusion, Luoyang 471009, China)
Abstract: Starting with the actual operational requirements of active defense, this paper analyzes the advantages, disadvantages, and usage scenarios of different trajectory prediction methods, also analyzes the differences between the active defense combat scenarios of air platforms and other aircraft trajectory prediction scenarios that are currently mainly studied. A state estimation scheme based on extended Kalman filtering is proposed for the special attack intent and motion law of the trajectory prediction object in this scenario. It simulates the process of the attack missile guided with proportional guidance law attacking aircraft based on simulation software, to establish an observation model under conditions of constant proportional guidance coefficient, and performs linearization simulation using Kalman filter nonlinear model. The motion states of the attack missile at different times are observed and the short-term trajectory prediction is performed. The simulation results show that the model can significantly reduce state estimation errors in the active defense combat scenario.
Key words: air to air missile; active defense; three-player conflict; trajectory prediction; state estimation; extended Kalman filter
