
基于运动模式集精细差异特征估计的真假弹道目标联合跟踪与辨识方法
2024-09-25 00:00:00蔡桂权饶彬宋聃
航空兵器 2024年4期












摘 要:针对对抗条件下弹道目标和有源多假目标跟踪及辨识难的问题, 基于稳健交互多模型(Robust Interacting Multiple Model, RIMM)策略, 提出真假弹道目标的联合跟踪与辨识方法。 该方法基于推导的真假目标运动模式集以及模式间的精细差异特征设计交互多模型(Interacting Multiple Model, IMM)策略, 以扩展卡尔曼滤波(Extended Kalman Filter, EKF)为子滤波器, 并引入概率调整因子与时变因子, 实时更新概率转移矩阵, 有效放大运动模式集的精细差异特征, 不仅能实现对真假目标的稳定跟踪, 提高跟踪精度, 同时也能实时在线辨识真假目标, 实现跟踪辨识一体化。 仿真结果表明, 该方法的跟踪效果比传统单模型EKF算法和经典的IMM+EKF算法更好, 能实时跟踪并辨识出真假目标, 有利于提高雷达资源调度的效率。
关键词:弹道目标; 有源假目标; 目标跟踪; 目标辨识; 交互多模型
中图分类号:TJ760; TN958
文献标识码: A
文章编号:1673-5048(2024)04-0128-11
DOI: 10.12132/ISSN.1673-5048.2024.0006
0 引 言
在导弹攻防对抗中, 采用有源假目标欺骗雷达是一种常见的对抗措施。 该方法会产生大量虚假航迹, 使雷达无法从众多目标中找到关注目标。 其结果是消耗大量雷达资源, 降低雷达工作性能, 从而实现提高导弹突防效能的目的。 作为防御方, 防御雷达也必须从硬件、 信号处理、 数据处理等方面采用多种对抗方法, 如基于新体制波形分集阵雷达实现抗主瓣方向欺骗式干扰[1]、 提取真假回波信号频响起伏特征进行识别[2]等。 随着相干干扰技术的进步[3-4], 不可避免地会有部分虚假目标突破硬件和信号处理层的“拦截”, 产生点迹并进入数据处理层, 乃至形成航迹, 严重影响防御雷达对关注目标的检测与跟踪。 因此, 非常有必要在数据处理层研究抗干扰算法。 一方面, 从众多目标中辨识出关注目标, 实现对其的稳定跟踪, 为下一步的拦截决策提供支撑; 另一方面, 辨识出虚假目标, 反馈到雷达硬件和信号处理层, 减少虚假目标对资源的消耗, 保证雷达始终有足够的资源维持对关注目标的检测与跟踪。
许多学者对数据处理层抗有源假目标欺骗干扰开展了研究。 根据研究场景的不同, 可以分为单部雷达抗干扰以及组网雷达抗干扰两种场景。 组网雷达抗干扰的研究集中在利用组网雷达观测到的不同维度的冗余信息, 通过信息融合, 改善对目标的检测[5]、 状态估计[6]、 识别[7-8]以及抗干扰性能[9-10]。 此外, Zhang等[11]提出了一种在电子对抗条件下组网雷达的资源优化算法, 利用有限的雷达资源提高目标跟踪精度。 而单部雷达抗干扰的研究集中在根据弹道目标与有源假目标存在的某一特征差异实现对欺骗干扰的抑制。 王铮等[12]以径向速度、 径向加速度、 角加速度与过载为评价指标对距离-速度拖引干扰进行识别。 赵艳丽等[13]提出动力学模型鉴别法, 基于自由段有源假目标与实体目标在动力学模型上的本质差异鉴别有源假目标。 饶彬等[14]提出延迟距离估计法, 通过估计有源多假目标的延迟距离实现真假目标识别。 总的来看, 要对抗有源假目标欺骗干扰, 辨识弹道目标和有源假目标, 首要的是确定两种目标之间存在某种特征差异, 如运动模式差异等。 根据运动模式差异进行辨识的好处是能联合处理目标跟踪与目标辨识问题, 而动力学模型鉴别法和延迟距离估计法在实时性上略有不足, 动力学模型鉴别法需要积累一段观测数据的滤波结果才能进行鉴别, 延迟距离估计法能在航迹跟踪的同时估计延迟距离, 但对延迟距离较大的目标, 仍然需要一段时间的迭代估计才能实现鉴别。
针对以上不足, 本文提出一种基于稳健交互多模型(Robust Interacting Multiple Model, RIMM)策略的真假弹道目标辨识方法。 该方法充分考虑作战时需要快速准确检测和跟踪弹道目标的需求, 根据交互多模型(Interacting Multiple Model, IMM)策略能自适应跟踪具有不同运动模式目标的特点[15], 首先保证实现对弹道目标和有源假目标的稳定跟踪, 同时进一步改进IMM策略具有的模式辨识能力[16-17], 边跟踪边识别, 快速判别出所跟踪的目标是重点关注的弹道目标还是有源假目标, 进而调整雷达采取的波位照射策略等, 防止雷达资源被有源假目标大量消耗, 保证雷达始终有足够的资源对弹道目标进行检测和跟踪。 其基本思想是基于弹道目标和有源假目标的运动模式存在的精细差异特征, 将这两种目标的运动模式设置为IMM策略的子滤波器运动模型, 以模型概率衡量运动模型与目标实际运动的匹配程度, 并将概率调整因子与时变因子引入IMM策略, 加快模型概率的收敛, 快速准确实现对弹道目标和有源假目标的稳定跟踪与准确辨识。
1 真假目标运动模式集
首先推导真目标和假目标的运动模式, 并分析真假目标在运动模式上存在的细微差异。 为了尽量符合实际场景, 也为了简化分析, 文中的真目标均指弹道中段的实体目标, 假目标指真目标上携带的干扰机转发目标回波信号产生的距离假目标, 延迟距离为ΔR(t)。
运动模式与后续的滤波算法设计密切相关, 雷达量测一般为距离、 方位角以及俯仰角, 如果在雷达站球坐标系下对滤波算法的状态方程进行建模分析, 可以避免对非线性的量测方程做线性化近似处理, 减小滤波误差, 提高跟踪精度, 因而在雷达站球坐标系下对真假目标运动模式进行建模。
1.1 真假目标运动建模
真目标在雷达站球坐标系下的状态矢量可以表示为X(t)=[R(t), A(t), E(t), R·(t), A·(t), E·(t)]T。 其中, R(t), A(t)和E(t)分别为真目标与雷达站之间的距离、 方位角和俯仰角; R·(t), A·(t)和E·(t)分别为距离、 方位角和俯仰角的一阶导数。 假设弹道中段目标仅受重力作用, 在雷达站球坐标系下对状态方程建模, 其加速度为[18]
R¨(t)A¨(t)E¨(t)=R(t)E·2(t)+R(t)(cos2E(t))A·2(t)-μ{R(t)+(r0+H)sinE(t)}R3e(t)+SR(ω, t)
-2R·(t)R(t)A·(t)+2A·(t)E·(t)tanE(t)+SA(ω, t)
-2R·(t)R(t)E·(t)-A·2(t)2sin2E(t)-μ(r0+H)cosE(t)R(t)R3e(t)+SE(ω, t) (1)
式中: μ=3.986 005×1014 m3/s2为地球重力常数; r0为地球半径; H为雷达站高度; Re为真目标到地心的距离; ω为地球自转角速度; SR(ω, t), SA(ω, t)和SE(ω, t)为地球自转在距离、 方位角和俯仰角上产生的扰动项, 不考虑地球自转时可忽略不计。
由于假目标在真目标量测的距离维上引入了延迟量ΔR(t), 可设其在雷达站球坐标系下的状态矢量为Xf(t)=[Rf(t), Af(t), Ef(t), R·f(t), A·f(t), E·f(t)]T。 其中, Rf(t), Af(t)和Ef(t)分别为假目标与雷达站之间的距离、 方位角和俯仰角; R·f(t), A·f(t)和E·f(t)分别为距离、 方位角和俯仰角的一阶导数。 其与真目标的状态矢量间的关系为
Rf(t)Af(t)Ef(t)R·f(t)A·f(t)E·f(t)R¨f(t)A¨f(t)E¨f(t)T≈
R(t)+ΔR(t)A(t)E(t)R·(t)+ΔR·(t)A·(t)E·(t)R¨(t)+ΔR¨(t)A¨(t)E¨(t)T (2)
将式(2)代入式(1)中, 通过变量替换法可得假目标在球坐标系下的加速度为
R¨f(t)A¨f(t)E¨f(t)={[Rf(t)-ΔR(t)]E·2f(t)+[Rf(t)-ΔR(t)]cos2[Ef(t)]A·2f(t)+ΔR¨(t) -μ{Rf(t)-ΔR(t)+(r0+H)sinEf(t)}R3e(t)+SRf(ω, t)}
-2R·f(t)-ΔR·(t)Rf(t)-ΔR(t)A·f(t)+2A·f(t)E·f(t)tanEf(t)+SAf(ω, t)
-2R·f(t)-ΔR·(t)Rf(t)-ΔR(t)E·f(t)-A·2f(t)2sin[2Ef(t)]-μ(r0+H)cosEf(t)[Rf(t)-ΔR(t)]R3e(t)+SEf(ω, t)(3)
式中: SRf(ω, t), SAf(ω, t)和SEf(ω, t)为地球自转在距离、 方位角和俯仰角上产生的扰动项, 不考虑地球自转时可忽略不计。
从加速度上看, 延迟距离ΔR(t)是真假目标运动模式存在差异的主要因素。 如果ΔR(t)=0, 真假目标在球坐标系下的加速度就会完全相同, 无明显的运动模式差异。
1.2 真假目标运动模式精细差异特征
由于加速度可表征目标的运动模式特征[13], 因而可通过比较真假目标的加速度来推导真假目标运动模式的精细差异特征。 由于在雷达站球坐标系下比较加速度不够直观, 选择在东北天(East North Up, ENU)坐标系下分析。
真目标在ENU坐标系下的加速度为[18]
a(t)=r¨(t)=-μR3e(t)I+ω2Φ2[r(t)+ξ]-2ωΦ1r·(t)(4)
式中:
Φ1=0-sinBcosB
sinB00
-cosB00;
Φ2=Φ21=-1000-sin2BsinBcosB0sinBcosB-cos2B;
r(t), r·(t)和r¨(t)分别为真目标在ENU坐标系下的位置、 速度和加速度矢量; μ=3.986 005×1014 m3/s2为地球重力常数; ξ=[0, 0, r0+H]T; r0为地球半径; B和H为雷达站的纬度和高度; Re为真目标到地心的距离; ω为地球自转角速度。
由变量替换法可得假目标在ENU坐标系下的加速度为
af(t)=r¨f(t)=-μR3e(t)rf(t)+ξ1-β1(t)+
β¨1(t)1-β1(t)rf(t)+2β·1(t)1-β1(t)r·f(t)+SENU(ω, t)(5)
式中:
SENU(ω, t)=2ωΦ1β·1(t)1-β1(t)rf(t)-r·f(t)-
ω2Φ2rf(t)+ξ1-β1(t);
rf(t), r·f(t)和r¨f(t)分别为假目标在ENU坐标系下的位置、 速度和加速度矢量; β1(t)为延迟距离ΔR(t)与假目标到雷达的距离Rf(t)的比值, 即
β1(t)=ΔR(t)Rf(t)(6)
则真假目标的加速度之差为
Δa(t)=af(t)-a(t)=-μR3e(t)rf(t)+ξ1-β1(t)+
β¨1(t)1-β1(t)rf(t)+2β·1(t)1-β1(t)r·f(t)+
SENU(ω, t)--μR3e(t)I+ω2Φ2[r(t)+ξ]-
2ωΦ1r·(t)=-μR3e(t)β1(t)rf(t)+
ξ1-β1(t)+β¨1(t)1-β1(t)rf(t)+2β·1(t)1-β1(t)r·f(t)-ω2β1(t)Φ2rf(t)+ξ1-β1(t)+2ωβ1(t)·Φ1β·1(t)1-β1(t)rf(t)-r·f(t)(7)
若忽略地球自转作用, 并假设ΔR(t)为常数, 则有
Δa(t)=af(t)-a(t)≈-μR3e(t)β1(t)·
rf(t)+ξ1-β1(t)=-μR3e(t)β1(t)·
r(t)1-β1(t)+ξ1-β1(t)=-μR3e(t) β1(t)1-β1(t)·
[r(t)+ξ]=-μR3e(t) ΔR(t)R(t)·[r(t)+ξ]=-μR2e(t) ΔR(t)R(t)eRe(8)
由式(8)可知, 真假目标运动模式存在的细微差异主要与延迟距离ΔR(t)以及真目标斜距R(t)有关。 而R(t)实际上取决于真目标与雷达的相对位置。 因而真假目标运动模式的差异与雷达相对布站位置和延迟距离ΔR(t)有关, 这与假目标的产生原理是一致的, 可将这种细微差异表征为运动模式精细差异特征, 作为真假目标辨识的依据。
2 基于RIMM策略的真假弹道目标联合跟踪与辨识方法
目前对真假目标跟踪与辨识的大部分研究工作都是把跟踪与辨识当成独立的、 互不干扰的处理过程, 分别开展研究。 从全局的角度上看, 两者可以耦合, 相互促进, 提升数据处理的性能。 如果不区分目标威胁度, 对每个目标都进行跟踪与辨识, 计算量极大, 给雷达系统资源调度带来沉重的负担。 如果能将跟踪与辨识结合在一起, 跟踪的同时就完成目标的辨识, 根据辨识的结果确定目标威胁度, 相应地调整跟踪策略, 可提升对高威胁度目标跟踪的有效性和准确性, 避免跟踪低威胁度目标造成的资源消耗。 多模型算法就蕴含着这样的潜力。 IMM策略具备模式辨识能力, 可实现目标运动模式与滤波模型集的匹配, 匹配程度可由滤波模型概率或滤波误差衡量, 因而IMM策略也可应用于故障检测与识别等领域[19-20]。 不同于先跟踪后检测的处理方法, IMM策略在跟踪的同时实现故障类型的在线检测, 再根据检测结果对跟踪算法进行调整, 具有较好的实时性。 这一点同样可以应用于真假目标的跟踪与辨识中, 实现跟踪辨识一体化, 两者相互促进, 提高算法的实时性和准确性。 本文主要基于真假目标在运动模式上的精细差异特征, 针对传统的IMM策略收敛缓慢、 不稳定的缺点, 提出一种RIMM策略, 在实现有效跟踪的同时, 快速准确辨识真假目标。
2.1 经典交互多模型(Classical Interacting Multiple Model, CIMM)策略
CIMM策略基于Markov过程对多个模型进行交互, 实现对目标状态的次优估计。 每个模型设定一个模型概率值, 实际上也是该模型的可信权重值, 各个模型之间的概率转移满足马尔可夫链。 其具体实现步骤如下。
(1) 输入交互
μij(k|k)=pijμi(k)∑ipijμi(k), i, j∈{1, 2, …, N}(9)
式中: μi(k)为模型i在k时刻的概率; pij为模型i转移到模型j的概率; μij(k|k)为混合概率; N为模型数量。
交互后各模型的概率为
μj(k+1|k)=∑ipijμi(k)(10)
相应的滤波器状态估计量和协方差矩阵分别为
X^j 0(k|k)=∑iX^i(k|k)μij(k|k)(11)
Pj 0(k|k)=∑i{Pi(k|k)+[X^i(k|k)-
X^j 0(k|k)][·]T}μij(k|k)(12)
式中: X^i(k|k)和Pi(k|k)分别为模型i对应的滤波器在k时刻得到的状态估计量和协方差矩阵。
(2) 各子滤波器分别滤波
首先需要根据目标的运动模式对状态方程进行建模, 并根据状态量和量测建立量测方程。 随后在Kalman滤波算法的框架下进行滤波。 如果状态方程和量测方程都是线性的, 采用线性卡尔曼滤波(Linear Kalman Filter, LKF)算法即可, 否则需要做非线性处理, 采用扩展卡尔曼滤波(Extended Kalman Filter, EKF)算法或不敏卡尔曼滤波(Unscented Kalman Filter, UKF)算法等。 各子滤波器得到的状态估计量和对应的协方差矩阵分别为X^j(k+1|k+1)和Pj(k+1|k+1), 残差和对应的协方差矩阵分别为rj(k+1)和Sj(k+1)。
(3) 概率更新
滤波器j的似然函数Λj(k+1)为
Λj(k+1)=1|2πSj(k+1)|exp[-12rTj(k+1)·S-1j(k+1)rj(k+1)](13)
似然函数Λj(k+1)可以衡量每个模型描述的准确程度, 进而更新k+1时刻的模型概率:
μj(k+1)=Λj(k+1)μj(k+1|k)∑iΛi(k+1)μi(k+1|k)(14)
(4) 输出交互
根据各子滤波器的状态估计量、 协方差矩阵以及模型概率可以得到总体的状态估计量X^(k+1|k+1)和协方差矩阵P(k+1|k+1), 即
X^(k+1|k+1)=∑jX^j(k+1|k+1)μj(k+1)(15)
P(k+1|k+1)=∑j{Pj(k+1|k+1)+
[X^j(k+1|k+1)-
X^(k+1|k+1)][·]T}·
μj(k+1)(16)
2.2 稳健交互多模型(Robust Interacting Multiple Model, RIMM)策略
CIMM策略假设概率转移矩阵是已知且固定不变的, 这在目标的运动模式变化规律未知的情况下有一定的合理性。 但在本场景中, 真假目标不仅运动模式已知, 运动模式变化也有一定的规律: 在跟踪滤波初期, 目标的运动模式未知时, 可使用真假目标运动模式构成的运动模式集, 优先保证对未知目标的有效跟踪, 而跟踪的过程也是辨识的过程, 在这一过程中, 与未知目标运动模式相匹配的模式会占优势, 当该模式对应的滤波模型概率足够大且保持稳定, 就可以据此判断目标类型, 实现对真假目标的辨识。 这对概率转移矩阵提出了两点约束:
(1) 实时性。 即加快迭代估计的速度, 减小优势模型出现需要的时间。
(2) 稳健性。 优势模型出现后, 要减小噪声干扰等对模型概率的影响, 对某一个目标而言, 最终的优势模型只能有一个, 不应出现真目标和假目标的运动模式交替占优势的情况, 这一点也与实际场景相符。 中段弹道目标跟踪不同于飞机类机动目标跟踪, 真假目标不具有较强的机动性, 模型之间切换的概率应大为减少。
由于概率转移矩阵总是不可避免地需要引入先验信息, 本文一方面根据研究场景设置初始的概率转移矩阵, 另一方面改进概率转移矩阵的更新规则, 减小初始概率转移矩阵对跟踪辨识结果的影响。
设k时刻概率转移矩阵为
P(k)=[pij(k)]N×N(17)
式中: pij(k)为模型i到模型j的转移概率, i, j=1, 2, …, N, N为RIMM策略中子模型个数。
k+1时刻的概率转移矩阵为
P(k+1)=[pij(k+1)]N×N(18)
基于以上两点约束, 在概率转移矩阵中引入概率调整因子和时变因子来加速滤波器收敛以及保持滤波模型的稳健性, 即
pij(k+1)=pij(k)βij(k+1)ηj(k+1)∑Nj=1pij(k)βij(k+1)ηj(k+1)(19)
式中: ηj(k+1)为概率调整因子, 即
ηj(k+1)=11-[uj(k+1)-uj(k)](20)
当uj(k+1)>uj(k), 模型j占一定的优势, 因而从模型i转移到模型j的概率应当增大, 即ηj(k+1)>1; 反之亦然。 概率调整因子能加快优势模型的出现, 快速辨识目标。 而βij(k+1)为引入的时变因子, 即
βij(k+1)=1-N-1Ne-α(k+1)T, i=j
1Ne-α(k+1)T, i≠j (21)
式中: α为衰减参数, 根据需要选取, 一般取0.005; T为雷达采样间隔。
当k≥0时, e-α(k+1)T<1, 因而有
βii(k+1)=1-N-1Ne-α(k+1)T>1Ne-α(k+1)T=
βij(i≠j)(k+1)(22)
即时变因子使优势模型i出现后下一时刻的优势模型仍然为模型i的概率更大, 并且随着时刻k的增大, 有
βii(k+1)=1-N-1Ne-α(k+1)T→1(23)
βij(i≠j)(k+1)=1Ne-α(k+1)T→ 0(24)
即在跟踪滤波后期, 时变因子使模型i自身保持为优势模型的概率更大, 有助于保证优势模型的稳定性, 防止模型概率受噪声的影响发生频繁的震荡, 使IMM策略更为稳健。
2.3 基于RIMM策略的联合跟踪与辨识方法
由于真假目标滤波模型概率实际反映滤波模型与目标运动模式之间的相似性, 因而真目标滤波模型的概率越大, 跟踪的未知目标越可能是真目标, 对假目标亦然。 定义模型概率较大且保持稳定的滤波模型为优势模型, 确定优势模型即可判别目标类型。 为了防止噪声干扰以及其他因素导致的错误辨识, 保证辨识的准确性, 要求连续M帧的模型i概率μi(k)大于门限μTh, 并且每帧模型概率的波动起伏Δμi(k)=μi(k)-μi(k-1)小于门限ΔμTh时, 模型i判别为优势模型, 从而得到跟踪目标的辨识结果。
基于RIMM策略的联合跟踪与辨识方法的实现流程如下, RIMM策略与CIMM策略部分流程相同, 不再赘述。
(1) 输入交互
根据更新的概率转移矩阵[pij(k)]N×N计算混合概率:
μij(k|k)=pij(k)μi(k)∑ipij(k)μi(k), i, j∈{1, 2, …, N}(25)
然后根据式(10)~(12)分别计算各子滤波器交互后的概率μj(k+1|k)、 状态估计量X^j0(k|k)以及协方差矩阵Pj0(k|k)。
(2) 各子滤波器分别滤波
根据各子滤波器对应的滤波模型选择合适的滤波算法, 计算各子滤波器滤波后的状态估计量X^j(k+1|k+1)和对应的协方差矩阵Pj(k+1|k+1), 以及残差rj(k+1)和对应的协方差矩阵Sj(k+1)。
(3) 概率更新
根据式(14)更新k+1时刻各滤波模型概率μj(k+1)。
(4) 概率转移矩阵更新
根据式(20)~(21)计算概率调整因子ηj(k+1)和时变因子βij(k+1), 从而通过式(19)更新k+1时刻的概率转移矩阵[pij(k+1)]N×N。
(5) 门限判决
判断是否存在连续M帧的滤波模型i概率μi(k)大于门限μTh, 并且每帧滤波模型i概率的波动起伏Δμi(k)小于门限ΔμTh。 若存在, 则判别滤波模型i为优势模型, 从而得到跟踪目标的辨识结果; 若不存在, 继续执行下一步。
(6) 输出交互
根据式(15)~(16)计算总体的状态估计量X^(k+1|k+1)和协方差矩阵P(k+1|k+1)。
该方法的实现框架如图1所示。
本文主要关注真假目标的跟踪与辨识问题, 采用RIMM策略, 跟踪的同时得到辨识结果, 实现跟踪辨识一体化。 如果RIMM策略的子滤波器较多, 除了对真假目标进行跟踪辨识, 还对在稀薄大气条件下的箔条、 诱饵等其他目标进行跟踪辨识, 可结合变结构体多模型算法的思想[21], 依据辨识结果实现模型集的自适应调整。 如在弹道目标的再入段, 箔条和诱饵被大气层过滤, 模型集可删去箔条和诱饵对应的模型, 减少模型之间的竞争作用, 进一步提高算法的跟踪精度和辨识准确性。
3 仿真实验与结果分析
3.1 仿真场景描述
(1) 雷达参数
仿真场景设置的雷达主要参数如表1所示, 表中未涉及的参数取能使雷达正常工作的值。 假设整个跟踪过程中雷达的测距精度和测角精度不变。
(2) 目标参数
仿真场景为真目标进入中段后释放有源假目标干扰产生大量虚假航迹。 真目标进入中段前的关机点初始状态以及运动参数如表2所示, 通过Runge-Kutta积分法可仿真弹道中段的运动轨迹。 真目标上携带转发欺骗式干扰机, 能在雷达视线角方向上延迟转发截获的雷达信号, 产生大量虚假目标, 假设干扰机每次转发的干扰个数相同, 延迟时间固定, 设真目标与最近一个假目标之间的延迟距离为ΔR(t)。
(3) 跟踪滤波算法设计
重点关注对真假目标跟踪与辨识的效果, 假设所有目标都能正确起始航迹。
跟踪滤波算法采用CIMM策略与RIMM策略。 设置两个子滤波器, 其滤波模型分别对应真目标运动模式与假目标运动模式, 这样的好处是保证实现对真假目标的有效跟踪, 进而实现真假目标辨识。
真目标运动模式对应的子滤波器状态向量为X(t)=[R(t), A(t), E(t), R·(t), A·(t), E·(t)]T, 连续非线性的状态方程为
f(X(t), t)=R·(t)
A·(t)
E·(t)
R¨(t)
A¨(t)
E¨(t)=
R·(t)
A·(t)
E·(t)
R(t)E·2(t)+R(t)(cos2E(t))A·2(t)-μ{R(t)+(r0+H)sinE(t)}R3e(t)+SR(ω, t)
-2R·(t)R(t)A·(t)+2A·(t)E·(t)tanE(t)+SA(ω, t)
-2R·(t)R(t)E·(t)-A·2(t)2sin(2E(t))-μ(r0+H)cosE(t)R(t)R3e(t)+SE(ω, t)(26)
量测方程为
R(t)A(t)E(t)=100000010000001000X(t)(27)
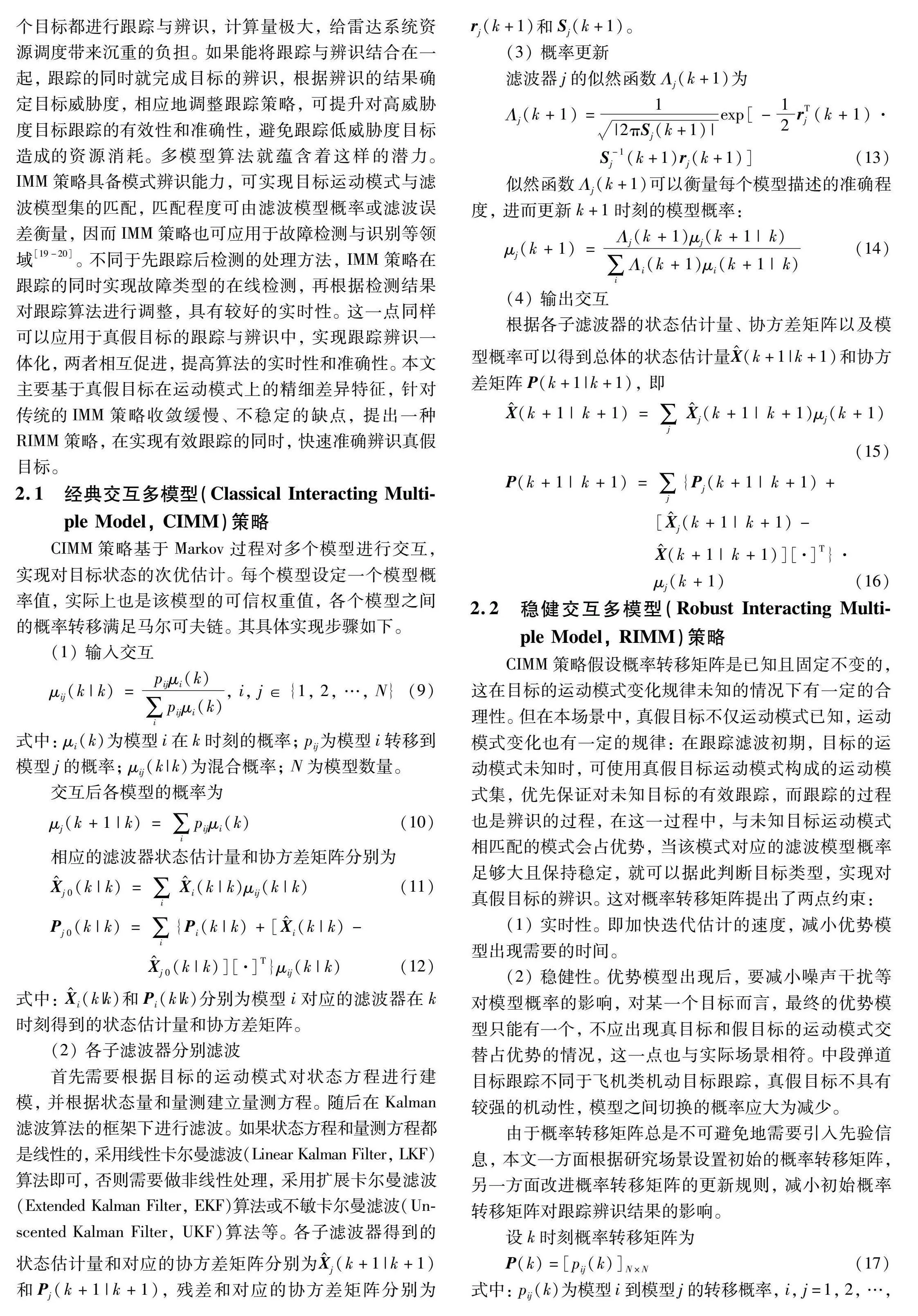
对于假目标, 为实时估计延迟距离ΔR(t), 保证滤波模型能与任意延迟距离ΔR(t)产生的假目标匹配, 将延迟距离ΔR(t)扩展到子滤波器的状态向量中, 即Xf(t)=[Rf(t), Af(t), Ef(t), R·f(t), A·f(t), E·f(t), ΔR(t)]T, 非线性的状态方程为
f(Xf(t), t)=R·f(t)A·f(t)E·f(t)R¨f(t)A¨f(t)E¨f(t)ΔR·(t)=R·f(t)A·f(t)E·f(t){[Rf(t)-ΔR(t)]E·2f(t)+[Rf(t)-ΔR(t)]cos2[Ef(t)]A·2f(t)+ΔR¨(t)- μ{Rf(t)-ΔR(t)+(r0+H)sinEf(t)}R3e(t)+SRf(ω, t)}-2R·f(t)-ΔR·(t)Rf(t)-ΔR(t)A·f(t)+2A·f(t)E·f(t)tanEf(t)+SAf(ω, t)-2R·f(t)-ΔR·(t)Rf(t)-ΔR(t)E·f(t)-A·2f(t)2sin[2Ef(t)]-μ(r0+H)cosEf(t)[Rf(t)-ΔR(t)]R3e(t)+SEf(ω, t)0(28)
对应的量测方程为
Rf(t)Af(t)Ef(t)=100000001000000010000Xf(t)(29)
真假目标滤波器的状态方程是非线性的, 量测方程是线性的, 需要采用非线性滤波算法处理。 由于状态方程的非线性不强, 可做线性化近似处理, 即采用EKF算法, 线性化推导过程不具体展开。
初始的Markov链概率转移矩阵设为
P=0.950.050.050.95(30)
CIMM策略不更新概率转移矩阵P, 本文提出的RIMM策略根据式(19)更新概率转移矩阵P, 放大真假目标运动模式差异, 可实现对真假目标的快速准确辨识。
子模型滤波器的过程噪声一般为设计参数, 由于真假目标的运动模式已知, 并且在弹道中段可看作只受重力作用, 因而过程噪声设置在较低水平。 滤波初始化采用两点差分。
(4) 关联算法设计
由于研究场景中目标相对稀疏, 关联算法采用最近邻关联算法。 采用椭球波门, 当量测点迹的位置满足不等式(31)时, 就认定该点迹为有效候选回波。
[Z(k)-Z^(k+1|k)]TS-1(k+1)·
[Z(k)-Z^(k+1|k)]≤γ(31)
式中: Z(k)为真实量测值; Z^(k+1|k)为预测的量测值; S(k+1)为子模型滤波器的新息协方差矩阵。 取γ=16, 则理论上目标落入波门的概率可达99.97%。 最后从所有的有效候选回波中选取离预测点迹最近的一个量测点迹进行关联。
航迹终止的依据是连续三帧没有量测点迹落入波门, 其他情况均用预测值代替滤波值用于位置更新。
3.2 真假目标运动模式集精细差异特征分析
本节通过仿真实验验证影响真假目标运动模式精细差异特征的因素。 由式(8)可知, 真假目标运动模式差异与延迟距离ΔR(t)以及雷达布站位置有关。 为比较运动模式差异, 使用单模型滤波算法进行跟踪滤波, 以真目标的运动模式建立状态方程, 通过EKF算法进行滤波。 模型差异越小, 滤波误差也会越小, 越能实现航迹的正确关联与滤波, 跟踪正确率越高; 而模型差异越大, 滤波误差也会越大, 越容易发生航迹失跟或误跟。
3.2.1 延迟距离ΔR(t)
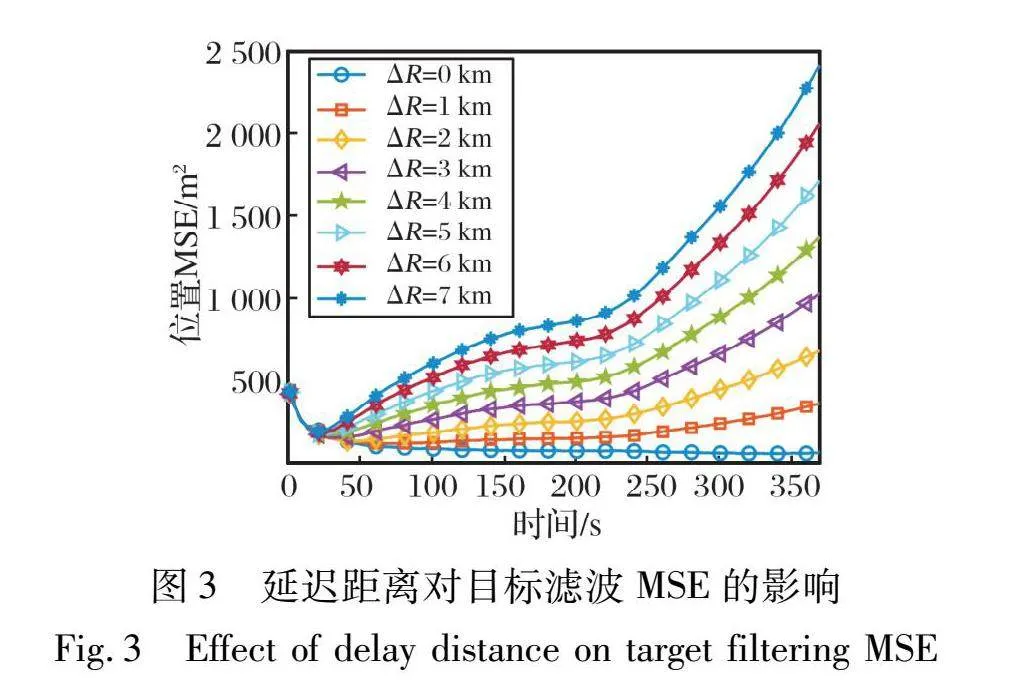
首先分析延迟距离ΔR(t)对各目标滤波误差的影响, 图2展示了某次仿真场景下ΔR(t)分别为0 km, 2 km和7 km时对应目标的原始滤波结果。 显然, ΔR(t)为7 km时, 假目标的滤波误差较大, 说明其与真目标的运动模式存在显著差异。 不失一般性, 做1 000次Monte Carlo仿真, 统计不同ΔR(t)下各目标滤波后得到的位置估计值的均方误差(Mean Square Error, MSE), 如图3所示。 当ΔR(t)为0 km, 即为真目标时, MSE趋于稳定, 滤波模型与目标运动模式匹配; ΔR(t)越大, MSE会随着时间积累而增大, 滤波模型与目标运动模式失配越严重。
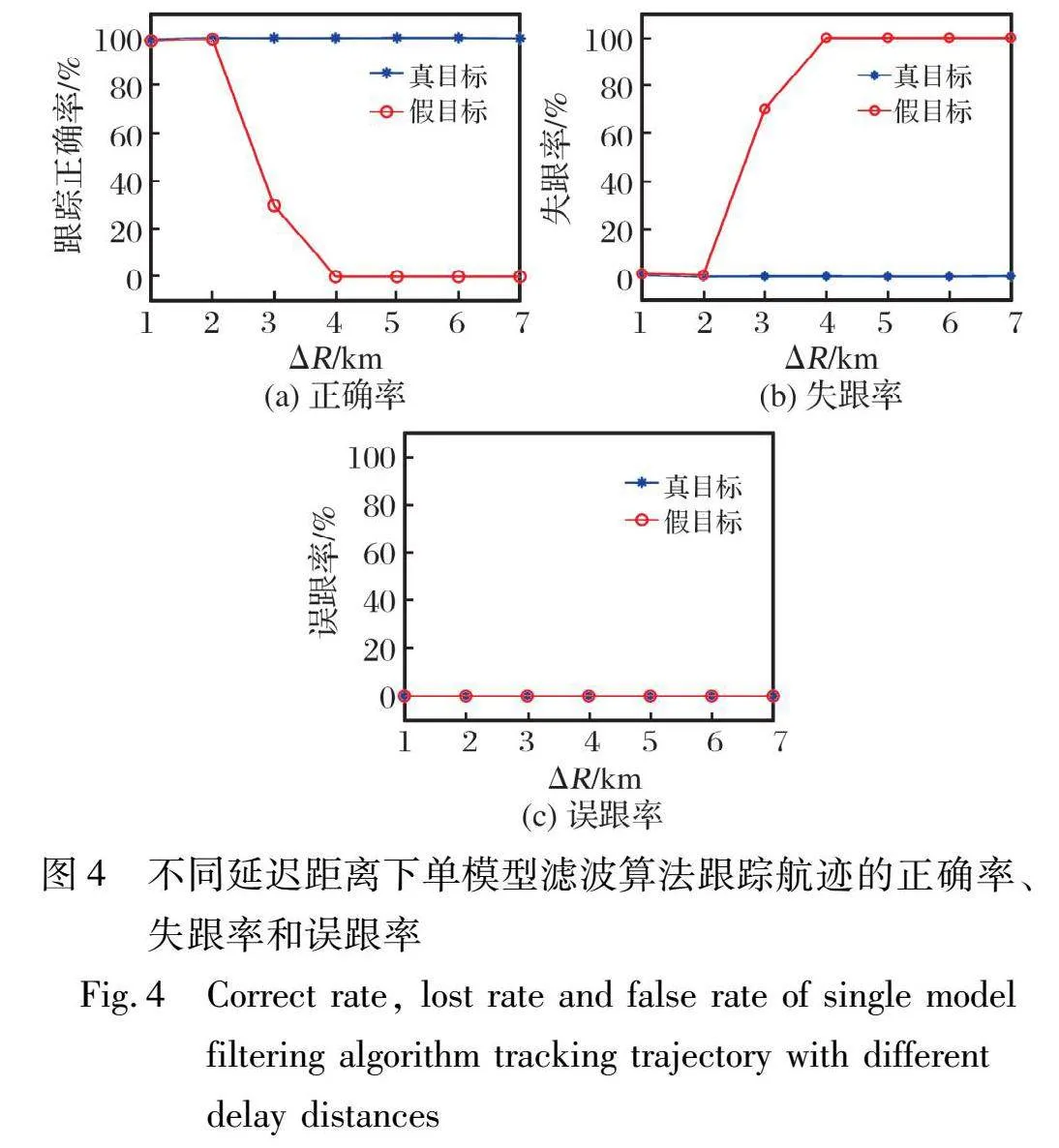
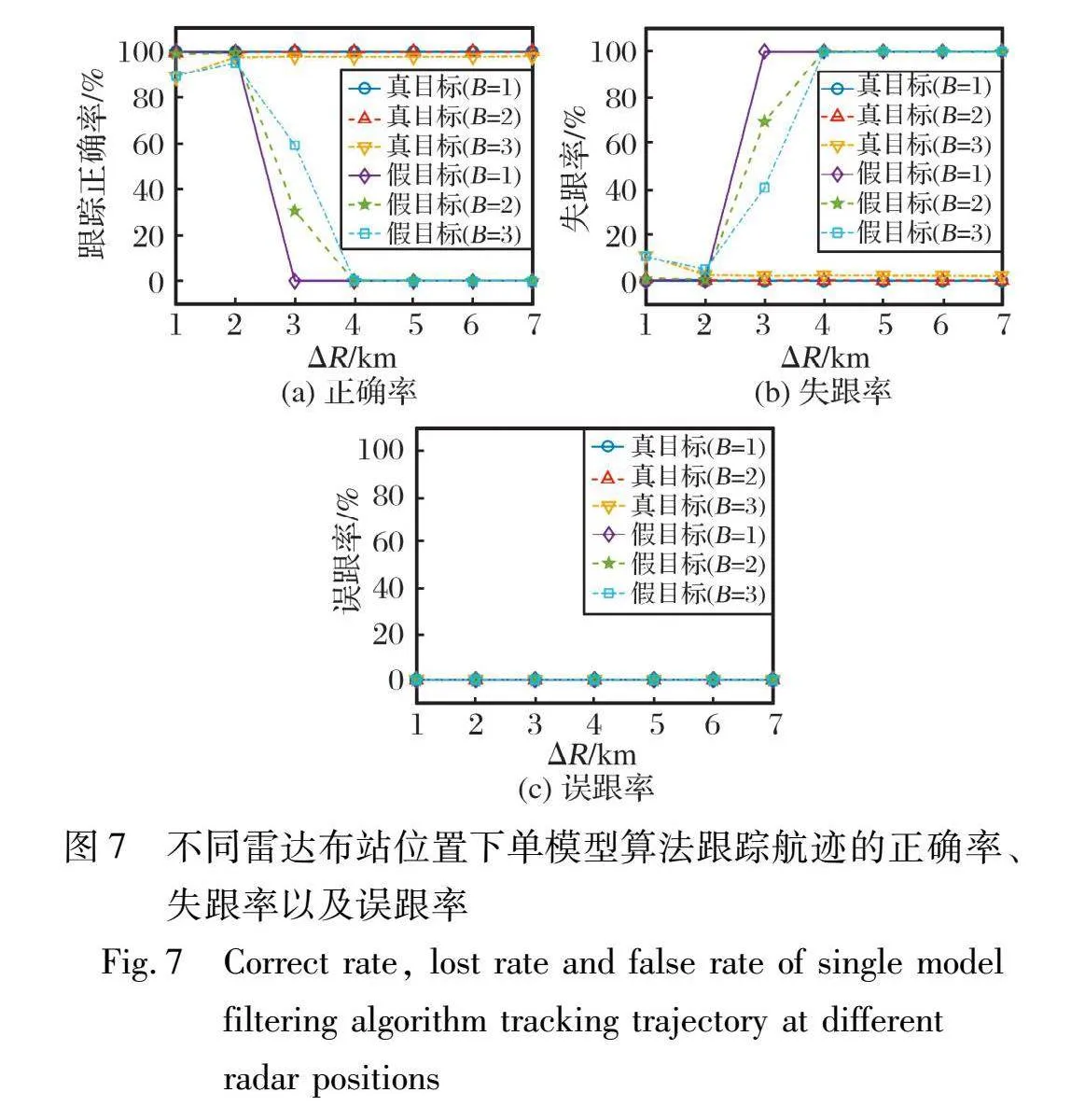
为进一步分析ΔR(t)对航迹跟踪的影响, 统计1 000次Monte Carlo仿真中航迹跟踪的正确率、 失跟率和误跟率。 航迹跟踪正确率指的是从航迹起始到观测结束的整个过程中正确关联量测达到97%以上并能实现稳定跟踪的航迹占所有航迹的比例。 失跟率指的是航迹滤波后, 因运动模式失配未能关联到量测导致失跟的航迹占所有航迹的比例。 而误跟率表示航迹关联到其他假目标量测或杂波等错误量测导致跟踪失败的航迹占所有航迹的比例, 包括因关联错误量测导致失跟的航迹。
跟踪结果如图4所示。 当ΔR(t)为1~2 km时, 真假目标的运动模式差异较小, 航迹跟踪正确率在100%左右; 当ΔR(t)稍增大到4 km, 航迹失跟率急剧增大到100%, 说明以真目标运动模式为滤波模型的算法失配, 滤波误差增大, 航迹发生失跟, 此时真假目标的运动模式有显著差异。
3.2.2 雷达布站位置
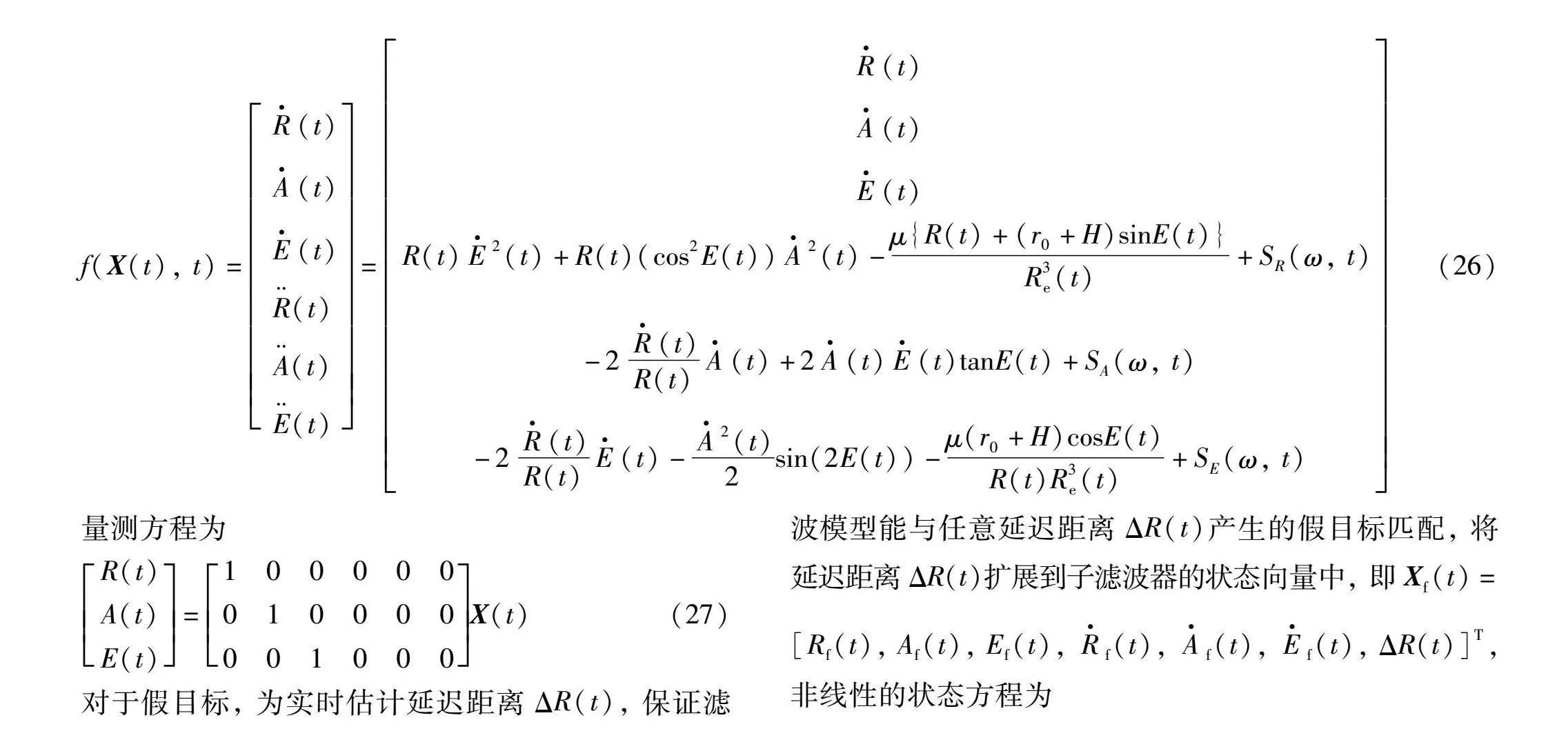
为便于分析雷达布站位置对真假目标跟踪的影响, 取雷达站的纬度B分别为1°N, 2°N和3°N, 经度和高度不变, 三种情况下雷达站与仿真弹道平面的距离依次增大, 使雷达与真目标间的距离也相应增大。 首先分析雷达布站位置对同一个假目标滤波误差的影响, 假目标的延迟距离ΔR(t)为3 km时的原始滤波结果如图5所示。 随着雷达站的纬度B增大, 目标的滤波误差逐渐减小, ΔR(t)造成的模型失配越不明显。 不失一般性, 做1 000次Monte Carlo仿真, 统计不同雷达布站位置下ΔR(t)分别为0 km, 2 km和3 km时滤波估计得到的各目标位置的MSE, 如图6所示。 当ΔR(t)为0 km, 即为真目标时, MSE逐渐减小且趋于稳定, 雷达布站位置对真目标的跟踪滤波没有显著影响; 当ΔR(t)不为零, 纬度B越大时, 同一假目标的MSE相对越小, 滤波模型与目标运动模式的失配越不显著。
图7为1 000次Monte Carlo仿真中航迹跟踪的正确率、 失跟率和误跟率。 不同雷达布站位置实际影响雷达与目标之间的斜距R(t), 在相同的延迟距离ΔR(t)下, 雷达距离目标越远, 真假目标运动模式差异相对越小, 单模型滤波算法越能实现对假目标航迹的完整有效跟踪。
总的来说, 真假目标运动模式差异与延迟距离ΔR(t)成正比, 与真目标斜距R(t)成反比。 这也与直观认知一致: 真目标斜距R(t)一定, 延迟距离ΔR(t)越大, 假目标航迹“变形”越严重, 模型差异越大; 延迟距离ΔR(t)一定, 真目标斜距R(t)越大, 假目标航迹“变形”相对越不明显, 模型差异越小。
3.3 RIMM策略的跟踪效果
首先分析两种IMM策略对不同目标滤波误差的影响, 图8为假目标的延迟距离ΔR(t)分别为0 km, 2 km和7 km时的原始滤波结果。 两种IMM策略都能使目标的滤波误差保持在一个合理的区间, 实现稳定跟踪。 不失一般性, 做1 000次Monte Carlo仿真, 统计不同IMM策略下ΔR(t)分别为0 km, 2 km和7 km时各目标滤波估计后得到的位置MSE, 如图9所示。 两种IMM策略下各目标的MSE都会随着时间推移而逐渐减小直至趋于稳定, 与CIMM策略相比, RIMM策略的MSE更小, 跟踪精度更高。
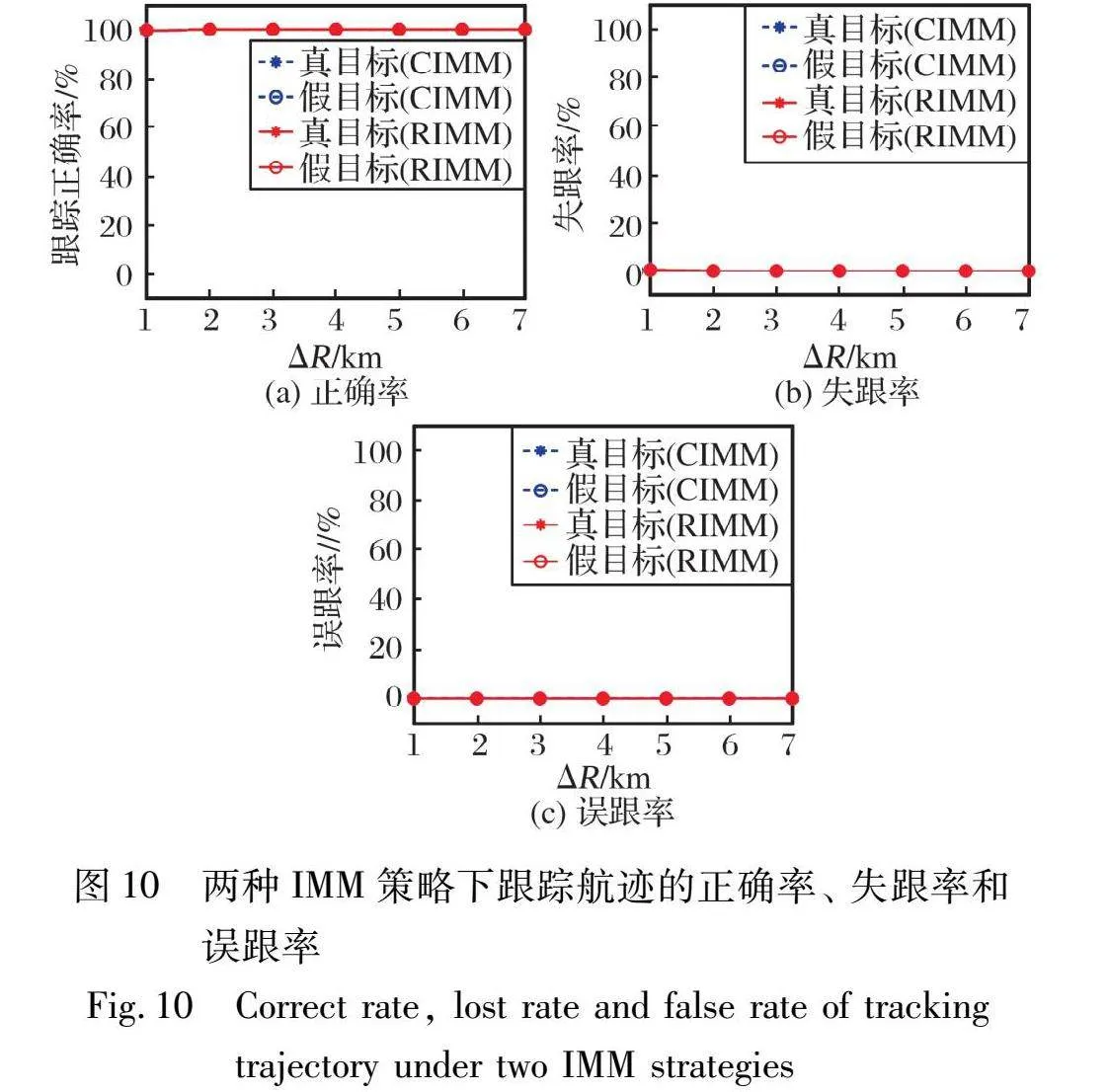
图10为1 000次Monte Carlo仿真中航迹的跟踪正确率、 失跟率和误跟率。 与图4相比, 由于两种IMM策略的子滤波器涵盖真目标和假目标的运动模式, 因而不仅能实现对真目标的稳定准确跟踪, 也能实现对不同延迟距离ΔR(t)的假目标的完整有效跟踪。
3.4 RIMM策略的辨识效果
RIMM策略可以实现对真假目标的跟踪, 保证在真目标出现时能实现对其的稳定有效跟踪, 同时快速辨识出假目标, 减少假目标对雷达资源的消耗, 提高资源调度的效率。
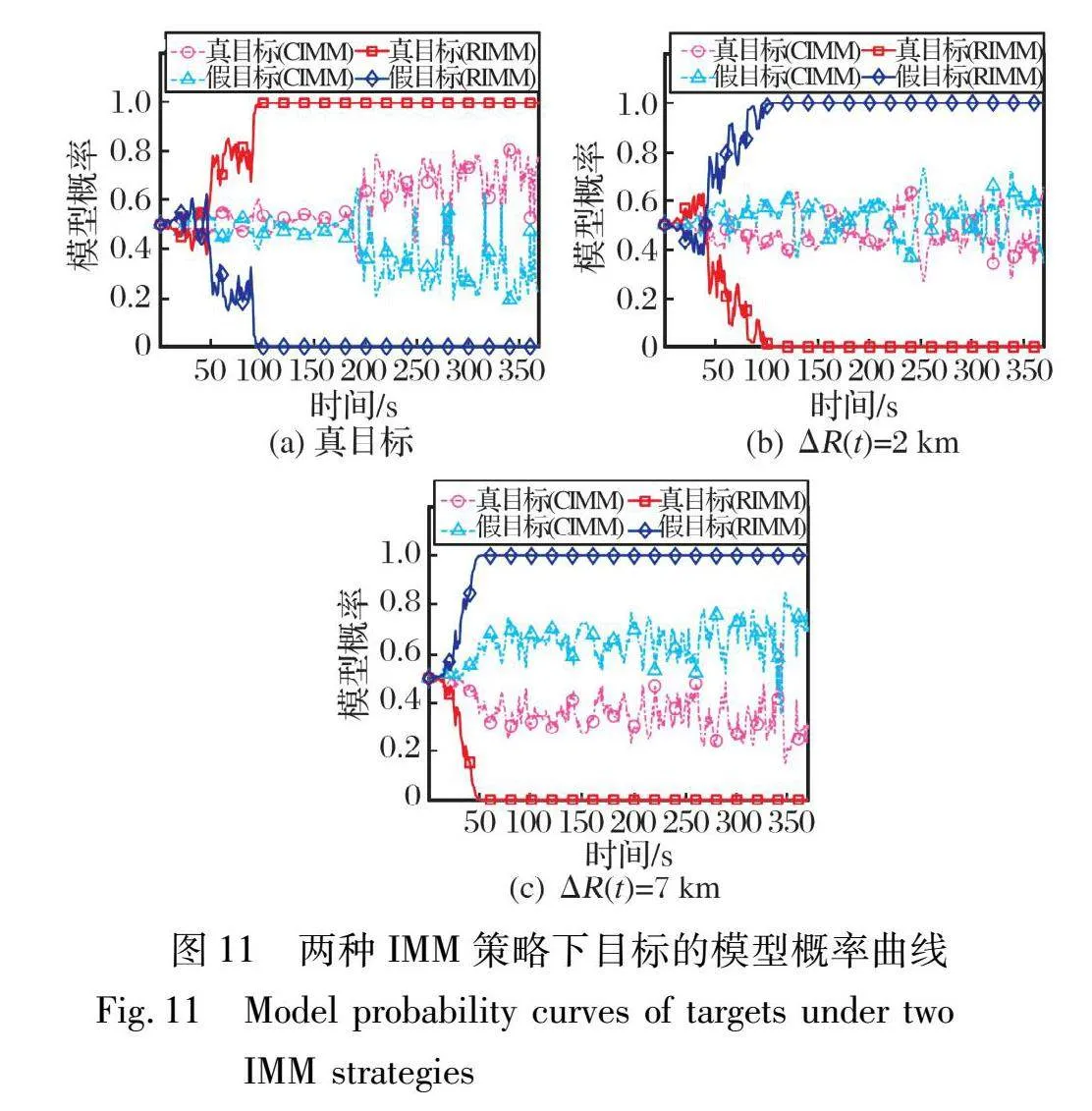
首先分析两种IMM策略下模型概率曲线的变化规律。 图11为真目标以及延迟距离ΔR(t)分别为2 km和7 km的假目标的模型概率曲线。 与CIMM策略相比, RIMM策略放大了真假目标运动模式差异, 使得真假目标模型概率曲线有显著差异, 提高了模型概率收敛的速度, 优势模型概率收敛于1, 且不会发生明显的震荡, 明显优于CIMM策略, 有利于提高辨识的速度以及准确性。
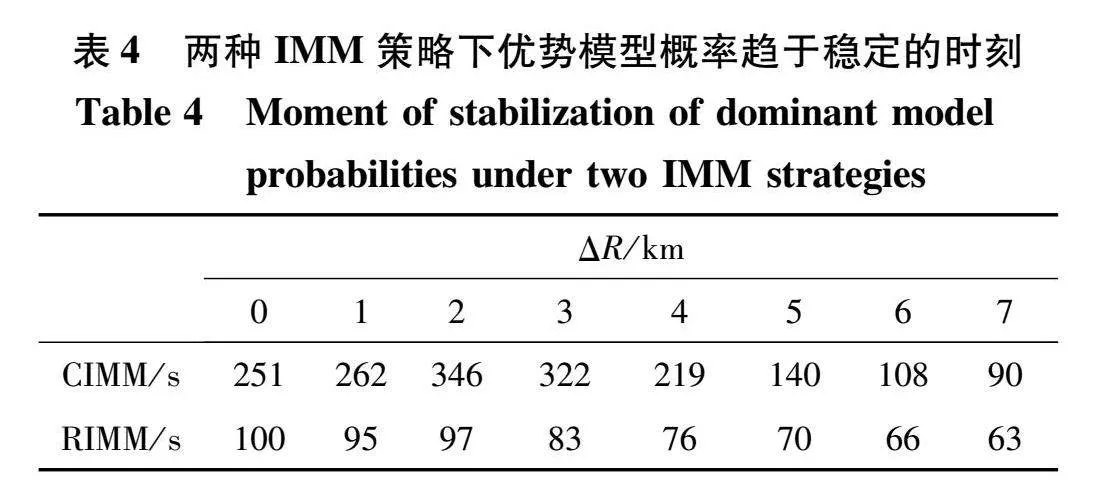
定义真假目标滤波模型中大于判别门限μTh并且连续10帧内模型概率变化小于ΔμTh的运动模型为优势模型。 由图11可知, 两种IMM策略无论在模型概率的均值还是在方差上均有显著差异, 因而对于CIMM策略, 取μTh=0.65, ΔμTh=3%, 对于RIMM策略, 取μTh=0.9, ΔμTh=1%。 做1 000次Monte Carlo仿真, 统计两种IMM策略下优势模型与目标的匹配率、 优势模型概率趋于稳定的时刻以及稳定后优势模型概率的标准差, 结果如表3~5所示。 其中ΔR=0 km即表示真目标。
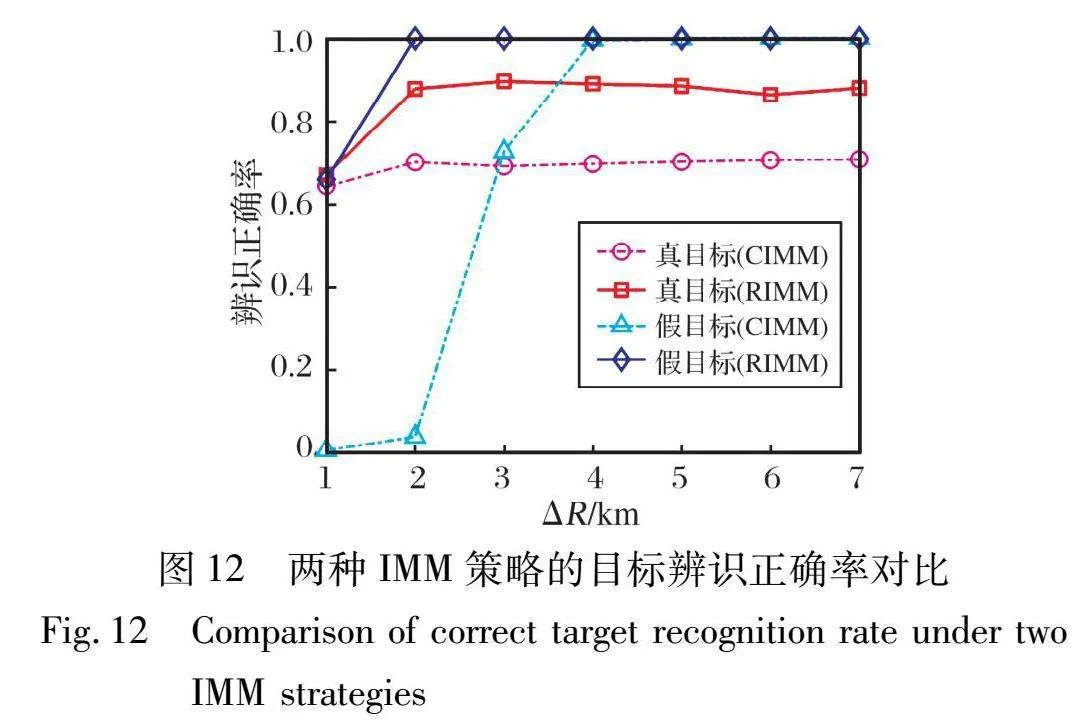
可见, 与CIMM策略相比, RIMM策略的优势模型与真假目标的匹配率更高, 实现目标辨识的时刻更早, 并且优势模型概率变化更为稳定。 CIMM策略与RIMM策略的辨识正确率如图12所示。 总的来说, RIMM策略可以更快更准确地实现对真假目标的辨识, 且假目标的延迟距离ΔR越大, 真假目标运动模式的细微差异特征越显著, 越容易实现辨识, 辨识正确率越高。
4 结 论
弹道导弹突防过程中采用的有源假目标欺骗干扰技术对防御雷达产生了严重威胁, 由于有源假目标和真目标有一定的相似性, 一方面大量消耗雷达资源, 另一方面不易区分真假目标。 本文从理论上推导出真假目标在运动模式上存在的精细差异特征, 并通过仿真实验验证了影响精细差异特征的因素, 为克服单模型算法与经典IMM+EKF算法在真假目标跟踪与辨识上的不足, 提出一种RIMM策略, 实时估计概率转移矩阵, 以模型概率为辨识指标, 实现了真假目标的稳定跟踪与快速准确辨识。 下一步工作是考虑更复杂的场景, 如弹道导弹突防时存在箔条、 碎片、 诱饵等实体目标干扰时如何实现对真目标的稳定跟踪与快速准确辨识。
参考文献:
[1] 许京伟, 廖桂生, 张玉洪, 等. 波形分集阵雷达抗欺骗式干扰技术[J]. 电子学报, 2019, 47(3): 545-551.
Xu Jingwei, Liao Guisheng, Zhang Yuhong, et al. On Anti-Jamming Technique with Waveform Diverse Array Radar[J]. Acta Electronica Sinica, 2019, 47(3): 545-551.(in Chinese)
[2] 韦文斌, 彭锐晖, 孙殿星, 等. 基于频响特性的大起伏密集假目标干扰识别技术[J]. 兵工学报, 2023, 44(10): 3204-3217.
Wei Wenbin, Peng Ruihui, Sun Dianxing, et al. Recognition of Dense False Target Jamming with Large Fluctuations Using Frequency Response Characteristics[J]. Acta Armamentarii, 2023, 44(10): 3204-3217.(in Chinese)
[3] Berger S D. Digital Radio Frequency Memory Linear Range Gate Stealer Spectrum[J]. IEEE Transactions on Aerospace and Electronic Systems, 2003, 39(2): 725-735.
[4] Feng D J, Xu L T, Pan X Y, et al. Jamming Wideband Radar Us-ing Interrupted-Sampling Repeater[J]. IEEE Transactions on Aerospace and Electronic Systems, 2017, 53(3): 1341-1354.
[5] Yan B, Paolini E, Xu L P, et al. A Target Detection and Tracking Method for Multiple Radar Systems[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: 1-21.
[6] Ma H, Antoniou M, Stove A G, et al. Target Kinematic State Estimation with Passive Multistatic Radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2021, 57(4): 2121-2134.
[7] Cao X M, Yi J X, Gong Z P, et al. Automatic Target Recognition Based on RCS and Angular Diversity for Multistatic Passive Radar[J]. IEEE Transactions on Aerospace and Electronic Systems, 2022, 58(5): 4226-4240.
[8] Zhang J Q, Wang Y. A Three-Dimensional Imaging Method of Ship Target via Multistatic Distributed InISAR[J]. IEEE Geoscience and Remote Sensing Letters, 2022, 19: 1-5.
[9] Huang D T, Cui G L, Yu X X, et al. Joint Range-Velocity Deception Jamming Suppression for SIMO Radar[J]. IET Radar, Sonar & Navigation, 2019, 13(1): 113-122.
[10] Yang Y, Da K, Zhu Y F, et al. Consensus Based Target Tracking Against Deception Jamming in Distributed Radar Networks[J]. IET Radar, Sonar & Navigation, 2023, 17(4): 683-700.
[11] Zhang H W, Liu W J, Zhang Q L, et al. Joint Resource Optimization for a Distributed MIMO Radar when Tracking Multiple Targets in the Presence of Deception Jamming[J]. Signal Processing, 2022, 200: 108641.
[12] 王铮, 韩宝玲. 基于UKF航迹滤波的干扰目标智能识别算法研究[J]. 航空兵器, 2019, 26(1): 83-88.
Wang Zheng, Han Baoling. An Intelligent Recognition Method for Jamming Target Based on UKF Track Filtering[J]. Aero Weaponry, 2019, 26(1): 83-88.(in Chinese)
[13] 赵艳丽, 周颖, 王雪松, 等. 基于动力学模型的有源假目标鉴别方法[J]. 国防科技大学学报, 2007, 29(5): 60-65.
Zhao Yanli, Zhou Ying, Wang Xuesong, et al. Algorithm of Discriminating Active Decoys and Radar Target Based on the Dynamic Model[J]. Journal of National University of Defense Technology, 2007, 29(5): 60-65.(in Chinese)
[14] 饶彬, 王雪松, 丹梅, 等. 球坐标系下具有抗干扰能力的弹道导弹跟踪算法[J]. 电子学报, 2009, 37(9): 1944-1949.
Rao Bin, Wang Xuesong, Dan Mei, et al. Ballistic Missile Tracking Algorithm with Anti-Jamming Capability in Spherical Coordinates[J]. Acta Electronica Sinica, 2009, 37(9): 1944-1949.(in Chinese)
[15] Blom H A P, Bar-Shalom Y. The Interacting Multiple Model Algorithm for Systems with Markovian Switching Coefficients[J]. IEEE Transactions on Automatic Control, 1988, 33(8): 780-783.
[16] Ru J, Li X R. Variable-Structure Multiple-Model Approach to Fault Detection, Identification, and Estimation[J]. IEEE Transac-tions on Control Systems Technology, 2008, 16(5): 1029-1038.
[17] Zhao S Y, Huang B, Liu F. Fault Detection and Diagnosis of Multiple-Model Systems with Mismodeled Transition Probabilities[J]. IEEE Transactions on Industrial Electronics, 2015, 62(8): 5063-5071.
[18] 饶彬, 肖顺平, 赵志超, 等. 外太空有源假目标的运动学特性[J]. 电子与信息学报, 2009, 31(11): 2600-2605.
Rao Bin, Xiao Shunping, Zhao Zhichao, et al. Motional Characteristics of Exo-Atmospheric Active Decoys[J]. Journal of Electronics & Information Technology, 2009, 31(11): 2600-2605.(in Chinese)
[19] Pourbabaee B, Meskin N, Khorasani K. Sensor Fault Detection, Isolation, and Identification Using Multiple-Model-Based Hybrid Kalman Filter for Gas Turbine Engines[J]. IEEE Transactions on Control Systems Technology, 2016, 24(4): 1184-1200.
[20] Sadeghzadeh-Nokhodberiz N, Poshtan J. Distributed Interacting Multiple Filters for Fault Diagnosis of Navigation Sensors in a Robotic System[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2017, 47(7): 1383-1393.
[21] Li X R, Bar-Shalom Y. Multiple-Model Estimation with Variable Structure[J]. IEEE Transactions on Automatic Control, 1996, 41(4): 478-493.
Joint Tracking and Recognition Method for Ballistic Targets and
False Targets Based on Fine Difference Feature Estimation of
Motion Pattern Set
Cai Guiquan1, Rao Bin1*, Song Dan2
(1. School of Electronics and Communication Engineering, Sun Yat-sen University, Shenzhen 518107, China;
2. Test Center, National University of Defense Technology, Xi’an 710106, China)
Abstract: Aiming at the difficulty of tracking and recognizing ballistic targets and active multi-false targets in the presence of countermeasures, a joint tracking and recognition method for ballistic targets and false targets based on the robust interacting multiple model (RIMM) strategy is proposed. This method develops the interacting multiple model (IMM) strategy based on the deduced true target and false target motion pattern set and the fine difference features within the set, using the extended Kalman filter (EKF) as sub filters. Additionally, this method introduces probability adjustment factors and time-varying factors into the IMM strategy to update the probability transition matrix in real time and amplify the fine feature difference of the motion pattern set effectively, which not only achieves stable tracking of ballistic targets and false targets, improves the tracking accuracy, but also identifies them online in real time, achieving integrated tracking and identification. Simulation results show that the proposed method has better performance than traditional single model EKF algorithm and classical IMM+EKF algorithm, and it can track and recognize ballistic targets and false targets in real time, which is conducive to improving the efficiency of radar resource scheduling.
Key words: ballistic target; active false target; target tracking; target recognition; interacting multiple model
