
基于AFCKF的捷联旋转弹视线角速率滤波算法
2024-09-25 00:00:00夏书涵范军芳纪毅王伟陈仕伟马乾才
航空兵器 2024年4期











摘 要:针对捷联旋转弹输出的视线角速率与姿态误差强耦合的问题, 提出一种基于自适应渐消容积卡尔曼滤波(AFCKF)的方法。 为实现弹目视线角速率的解耦, 考虑弹目相对运动特性, 构建包含末制导段视线角速率估计模型的状态模型, 并根据几何关系建立了包含弹目视线角和姿态角的量测模型。 为解决旋转弹下传统CKF视线角速率估计结果的发散导致滤波失效, 引入基于残差序列的渐消因子对预测状态协方差进行调节以快速收敛估计结果。 为验证AFCKF的有效性, 考虑姿态角和量测角的典型干扰。 仿真结果表明, 所提方法的视线高低角速率估计误差均值、 方位角速率估计误差均值分别为传统EKF的30.41%和42.18%, 有效提升了旋转弹视线角速率估计的精度。
关键词:旋转弹; 捷联导引头; 视线角速率; AFCKF; 非线性滤波
中图分类号: TJ765.3; V249.3
文献标识码: A
文章编号:1673-5048(2024)04-0086-07
DOI: 10.12132/ISSN.1673-5048.2024.0032
0 引 言
捷联导引头的优势在于其能够快速、 准确地搜索、 识别和跟踪目标, 在旋转弹上使用捷联导引头能够有效降低成本。 然而, 由于捷联导引头与弹体固连, 只能获取弹体坐标系下耦合了弹体姿态信息的测量数据, 而无法直接用于旋转弹的末制导控制。 此外, 旋转弹存在转速过高和姿态初值获取困难等问题, 因此旋转弹的视线角速率提取成为一个值得研究的问题。 目前, 学者们通过建立弹目视线角速率的状态方程和量测方程, 并利用卡尔曼滤波及其扩展算法来实现弹目视线角速率的提取。 孙婷婷等[1]在线性化捷联导引头数学模型后, 采用微分+稳态Kalman滤波估计视线角速率; Wang等[2]提出一种基于扩展卡尔曼滤波器(EKF)的LOS速率估算方法, 并通过使用带有光轴俯仰角的实际捷联激光导引头进行硬件在环模拟实验。 Zhu等[3]采用长短时记忆(LSTM)循环神经网络, 提出一种解耦算法, 解决了难以描述噪声特征的问题。
对于非线性状态估计, 最常用的算法包括扩展卡尔曼滤波(EKF)、 无迹卡尔曼滤波(UKF)以及容积卡尔曼滤波(CKF)。 其中, EKF需要非线性函数进行近似线性化, 因此对于非线性较强的状态方程效果并不理想; UKF在高维度空间具有发散的问题, 且需要选取适当的sigma点以避免过拟合或欠拟合; CKF基于随机采样点的高维积分问题被提出, 使用采样点(或称为Cubature点)来近似非线性函数, 从而可以减小拟合误差, 并且可以维护二阶矩来更好地估计噪声的协方差。 因此CKF相比于EKF和UKF, 具有较小的非线性误差, 适用于高维状态空间, 并且能够有效处理高斯不确定性的非高斯传感器噪声。 杨阳等[4]采用UKF对视线角速率进行估计, 减小了线性化误差对系统的影响。 张韬等[5]采取无迹施密特卡尔曼滤波器(USKF)在目标机动及制导律有落角约束的条件下完成了制导信息的提取。 Waldmann[6]针对运动模型高非线性特点, 采用无迹卡尔曼滤波技术估计弹目视线角速率。 但是UKF在高维空间可能存在发散或者精度下降的情况, 因此CKF在基于Cubature变换的基础上被提出。
自适应渐消卡尔曼滤波是防止滤波器发散的一种有效方法, 其核心思想是使用适当的渐消因子调整预测的均方误差并抑制滤波器的发散。 庄朝文等[7]提出一种基于假设检验的多重渐消因子卡尔曼滤波算法, 使对象模型存在误差或对象受到外扰时仍然收敛。 徐定杰等[8]提出利用残差序列的协方差, 自适应地改变渐消因子调整新息的权重, 减小了陈旧量测量值估计的影响。 Dang 等[9]引入了一种鲁棒的非线性卡尔曼滤波, 称为最小误差熵配准点立方卡尔曼滤波(MEEF-CKF), 并展示了其增强的鲁棒性。 这些方法可以提高滤波估计结果, 并在历史观测数据累积导致不稳定甚至发散的可能性下保持其有效性。
为了抑制滤波器的发散并提高视线角速率的提取精度, 以及提高捷联导引头制导信息的精度, 本文结合自适应渐消因子和CKF算法, 调整渐消因子的选取来实现稳定且精确的视线角速率提取。 采用AFCKF和EKF两种算法对末制导段的旋转弹弹目视线角速率进行估计。 结果表明, AFCKF在抑制滤波器发散方面表现出卓越性能, 有效提升视线角速率提取的精确度。 相较于EKF, AFCKF在导引信息输出制导精度方面表现更出色。
1 问题描述航空兵器 2024年第31卷第4期
夏书涵, 等: 基于AFCKF的捷联旋转弹视线角速率滤波算法
捷联导引头测量得到的弹目体视线角耦合了弹体姿态角, 因此需要建立不同的坐标系和不同坐标系之间的旋转关系来描述各角度之间的关系, 得到弹目视线角速率解耦算法的状态方程和量测方程, 以建立视线角速率解耦算法。
1.1 坐标系关系
旋转弹捷联导引头视线角速率估计模型用到的坐标系如下: 惯性坐标系OxIyIzI, 弹体坐标系OxByBzB, 体视线坐标系Oxsyszs, 视线坐标系Oxlylzl。
用来描述坐标系关系的角如下: qlh, qlv为惯性坐标系到视线坐标系下的视线角高低角和视线方位角; ψ, γ分别为弹体的俯仰角、 偏航角和滚转角; qsh, qsv为弹体坐标系到体视线系下的体视线高低角和体视线方位角。 各坐标系关系如图1所示。
视线角和体视线角的关系如图2所示。
1.2 弹目视线角模型
根据惯性坐标系和弹体坐标系的转换关系可得
[xByBzB]T=L(γ, , ψ)[xIyIzI]T(1)
式中: L(γ, , ψ)是和姿态角相关的变换矩阵, 可表示为
L(γ, , ψ)=L11L12L13L21L22L23L31L32L33(2)
将式(2)代入式(1)可得末制导段体视线高低角和体视线方位角的数学表达:
qsh=arcsin(L21cosqlhcosqlv+L22sinqlh-L23cosqlhsinqlv)
qsv=-arctanL31sinqlhcosqlv+L32sinqlh-L33cosqlhsinqlvL11cosqlhcosqlv+L12sinqlh-L13cosqlhsinqlv(3)
将式(3)记作h(x), 则观测方程可以写为
y=h(x)+v(n(, ψ, γ), Δq)(4)
式中: v(n(, ψ, γ), Δq)为体视线角高低角和体视线方位角的观测噪声, 以及耦合了姿态角误差的噪声。 其中, 观测噪声的分布为高斯分布, 而耦合了姿态角误差的噪声具有非均匀性和方向性, 并具有一定的累积效应, 无法用常规分布来描述。
根据惯性坐标系和弹体坐标系的转换关系可知, 弹体坐标系的转动角速度可表示为
ω=ψ·+·+γ·(5)
即
ωxBωyBωzB=L(γ, , ψ)0ψ·0+Lx(γ)00·+γ·00(6)
整理后可得姿态角的运动学方程为
·=ωyBsinγ+ωzBcosγ
ψ·=(ωyBcosγ-ωzBsinγ)/cos
γ·=ωxB-tan(ωyBcosγ-ωzBsinγ)(7)
可以看出, 由于旋转弹在弹轴方向转速过快, 导致姿态角随着时间快速变化, 使得姿态变换矩阵迅速变化, 根据量测方程的形式可以得到, 视线角观测误差耦合了快速变化的姿态变换矩阵, 因此不能够以简单的非线性滤波进行处理。
1.3 弹目运动模型
在视线坐标系中, 末制导段弹目相对运动方程可表示为
I¨s=I¨I+L(qlh, qlv)[ω·×]II+2L(qlh, qlv)[ω×]I·I+
L(qlh, qlv)[ω×][ω×]II(8)
将 qlh, q·lh, qlv, q·lv分别设为状态变量x1, x2, x3, x4, 将变换矩阵带入式(8), 根据弹目运动方程可建立末制导段状态方程f(x):
x·1=x2
x·2=- 2R·Rx2 - x24sinx1cosx1 - aByRx·3=x4
x4=2x2x4tanx1 - 2R·Rx4+aBzRcosx1(9)
式中: aBy, aBz分别为准弹体系下弹体加速度的y, z分量; R为弹目距离。
2 滤波器设计
gFoD14tE9+59aRzGj+i+imNDALZpOzDh2Qe+ifbzoY8=2.1 容积卡尔曼滤波
根据弹目视线角模型和弹目运动模型可以得到状态方程f(x)和量测方程h(x), 状态变量x^为qlh, q·lh, qlv, q·lv, 其中, q·lh为视线高低角速率, q·lv为视线方位角速率, 量测信息z^为qsh, qsv。 由于状态方程和量测方程均具有较强的非线性, 维度较高, 且由于旋转弹在弹轴方向的转速很大, 姿态矩阵快速变化, 因此相对于将非线性方程线性化的方法, 直接进行非线性滤波将具有更好的精度。 CKF不需要求解雅可比矩阵, 并在估计的状态变量大于3时具有更好的收敛效果。
CKF通过球面积分规则和径向规则将非线性滤波转化为数值积分进行处理, 过程分为预测步、 更新步, 以及估计。 根据以上规则, CKF的算法流程如图3所示。
2.2 AFCKF
当测量值不断增大时, 会导致滤波器发散, 进而失去估计作用, 这种情况在强非线性的状态方程和量测方程下更加的显著。 针对卡尔曼滤波器的发散问题, 渐消自适应卡尔曼滤波器利用观测数据, 并充分利用渐消因子λk, 以抑制滤波器的记忆长度。 渐消滤波[10]引入与滤波器自身输入的观测数据和估计数据相关的渐消因子来实时调整状态预测的协方差矩阵, 以解决滤波器发散的问题, 从而提高其鲁棒性[11-12]。
非线性滤波能够更好地适应系统的非线性特性, 一般来说能够解决普通的视线角速率和姿态角误差强耦合的问题。 然而, 根据式(4)和式(7)对旋转弹模型的描述, 旋转弹的姿态的变化较快, 姿态角误差反映到观测方程中的噪声更加具有不确定性, 一般的非线性滤波无法有效地适应这种快速变化的特性。 因此, 需要加入自适应渐消因子, 使得滤波器能够更有效地处理由于强耦合引起的不确定性变化。
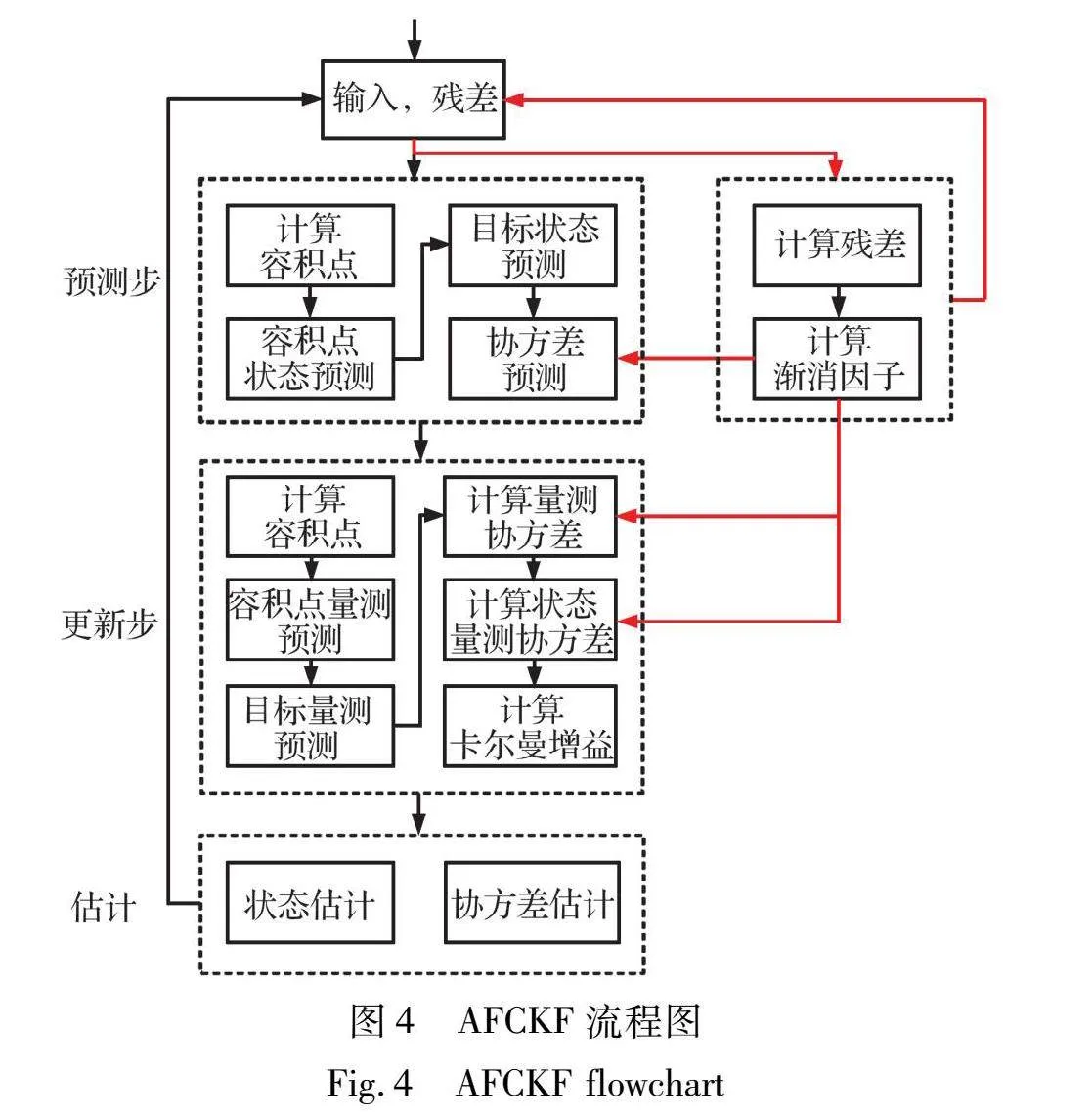
自适应渐消因子能够自动调整参数以适应不同工作条件和系统动态, 灵活地调整性能以更好地处理强耦合关系。 这种自适应性不仅加速了滤波器参数的收敛过程, 同时在系统动态变化时维持了滤波器的稳定性。 通过实时调整参数, 有效地抑制了强耦合问题中伴随的不确定性, 提高了系统的稳定性和性能。 此外, 通过优化观测模型, 滤波器能够更准确地适应姿态角误差和视线角速率之间的耦合关系, 从测量值中提取更有用的信息, 进一步提升估计的准确性。 加入自适应渐消因子的CKF流程如图4所示。
自适应渐消滤波通过引入渐消因子λk, 调整滤波增益, 使得残差序列保持正交, 即
E[(xk-x^k)(xk-x^k)T]=min
E(dk+jdTk)=0, k=0, 1, …; j=1, 2, …
其中, dk为残差, 即dk=zk-h(xk|k-1)。 所有时间的残差序列应该保持相互正交。
传统的自适应渐消算法是基于EKF建立的, 本文将在CKF中加入渐消因子 , 其计算过程如下:
S0, k=εS0, k-1+didTi1+ε, k>0
didTi, k=0 (10)
Nk=S0, k-HkQk-1HTk-Rk(11)
Mk=HkPxk|k-1HTk-Rk(12)
λk=max1, trace(Nk)trace(Mk)(13)
式中: Hk为量测方程在x^k|k-1处的雅可比矩阵; ε为遗忘因子, 通常取值在0.95到0.995之间。 将此渐消因子加入CKF中, 即可得到自适应渐消CKF算法。
在加入渐消因子后, CKF过程中的预测协方差改写为
Pk|k-1=
λk+11m∑mi=1(χ^ik|k-1-x^ik|k-1)(χ^ik|k-1-x^ik|k-1)T·
λTk+1+Qk-1(14)
量测协方差改写为
Sk|k-1=λk+11m∑mi=1(Z^ik|k-1-z^ik|k-1)(Z^ik|k-1-z^ik|k-1)T+Rk
(15)
状态量测协方差改写为
Ck=λk+11m∑mi=1(χ^ik|k-1-x^ik|k-1)(Z^ik|k-1-z^ik|k-1)T(16)
3 仿真分析
以某小型制导弹药为例, 制导弹药的初始位置为[2 700 m-2 700 m700 m] , 发射点初速度为200 m/s, 目标位置为[0 m0 m0 m]。 初始弹目视线高低角为10°, 弹目视线方位角为45°, 弹道偏角为10°, 弹道倾角为10°。 初始状态的弹目视线角和视线角速率和真实值有30%的偏差。 根据弹目相对运动模型和制导律在不同转速下对弹道进行仿真[13-14], 本文采用的制导律是比例导引[15], 表达式如下:
a=NR·0q·lvq·lh(17)
式中: N 为比例导引的系数, 取值为5。 制导弹药和目标的运动轨迹如图5所示。
在不同转速条件下分别采用EKF[16-17], CKF[18]和本文提出的AFCKF算法对视线角和视线角速率进行估计。
3.1 非旋转弹药角速率估计
当滚转角速度为0时, 经过EKF, CKF和AFCKF的视线高低角和视线方位角估计误差如图6所示, 其中, 真实值是理想条件下解耦得到的视线角和视线角速率。
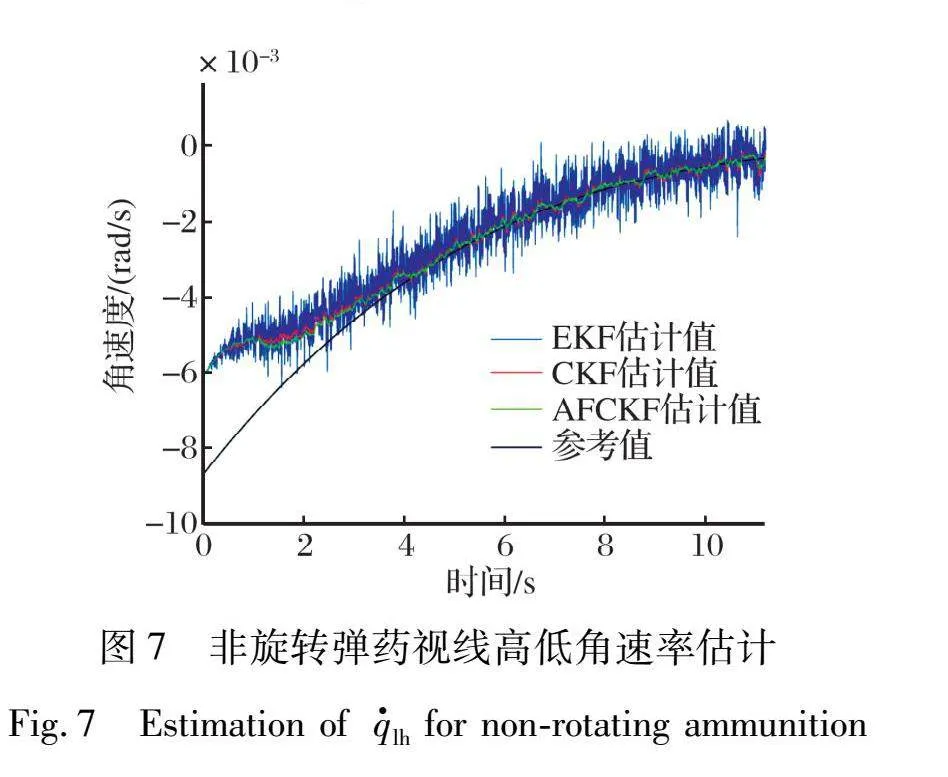
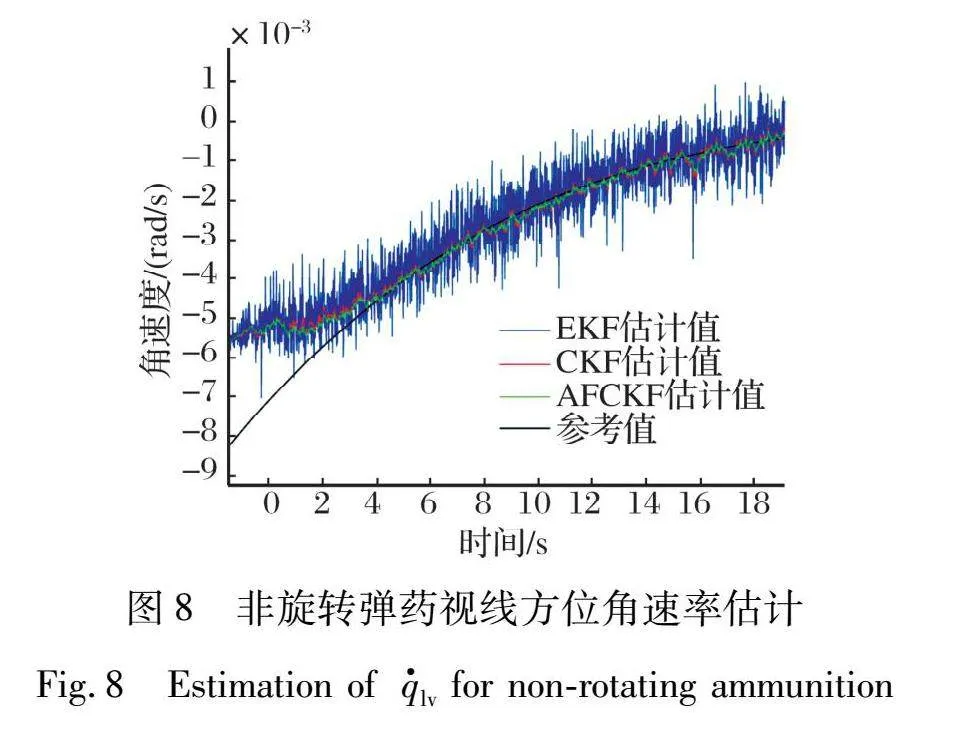
视线高低角速率和视线方位角速率的估计结果如图7~8所示。
角速率估计误差如图9所示。
从图6~9可以看出, EKF和AFCKF均可以对视线角和视线角速率有着较好的估计效果。 其中, AFCKF的滤波效果是优于EKF与CKF的滤波效果的, 这是因为相对于EKF与CKF, AFCKF对于具有强非线性的状态方程和观测方程具有更高的精度, 而且对分布进行近似要易于对任意非线性函数的近似。 此外, 由于自适应调整的渐消因子, 滤波器能够更准确地适应姿态角误差和视线角速率之间的耦合关系。
3.2 旋转弹药角速率估计
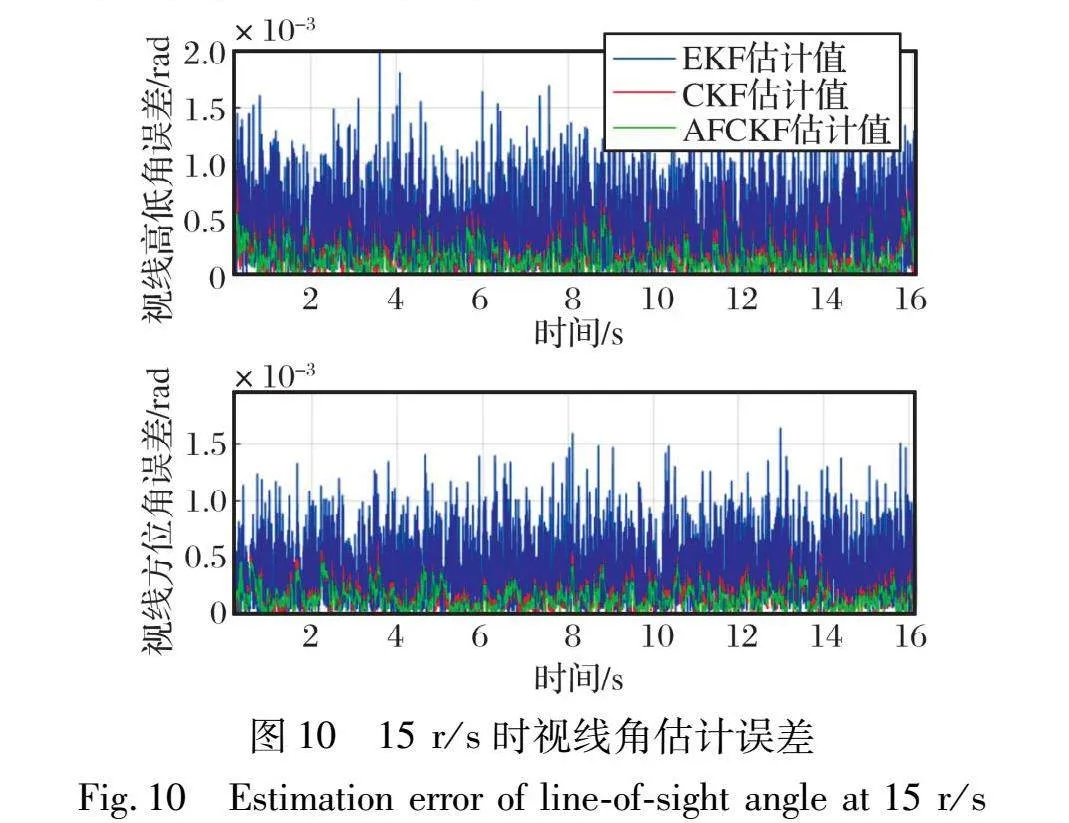
当滚转角速度为15 r/s时, 经过EKF和AFCKF的视线高低角和视线方位角估计误差如图10所示。
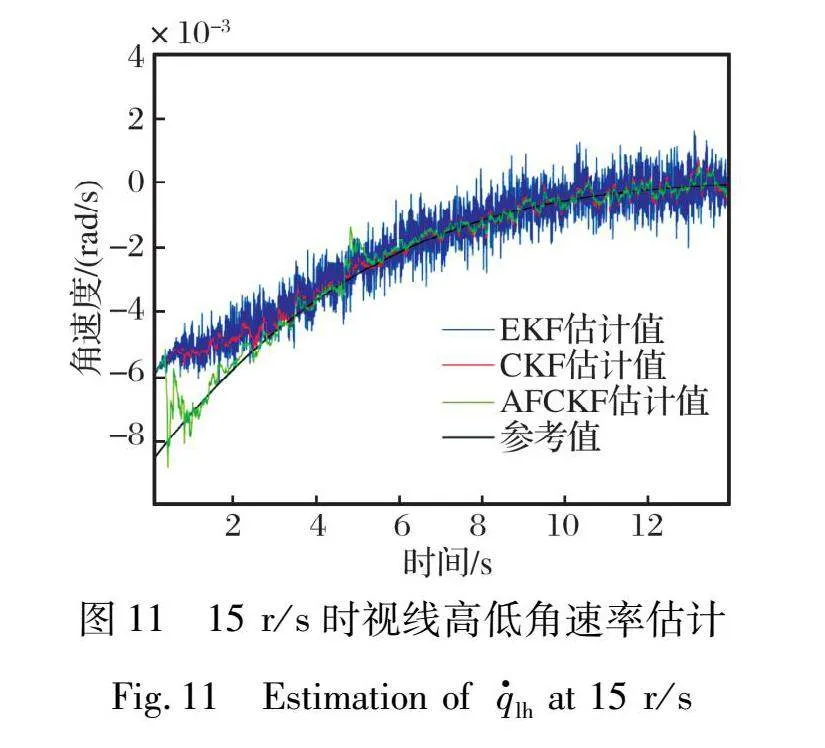
视线高低角速率和视线方位角速率的估计结果如图11~12所示。
对比图10~12与图6~8可以看出, 旋转弹下的弹目视线角和弹目视线角速率估计由于耦合了快速变化的
姿态角信息, 使得估计结果相对于非旋转弹更容易发散。
且对于初始误差影响, 由于采用了自适应渐消因子, 因此在结果发散的短暂时间步后, 在旋转弹的条件下, 自适应渐消因子迅速增大, 及时调整了滤波增益, AFCKF能够更加迅速地收敛到最优估计值。 使得估计结果收敛回误差范围内。
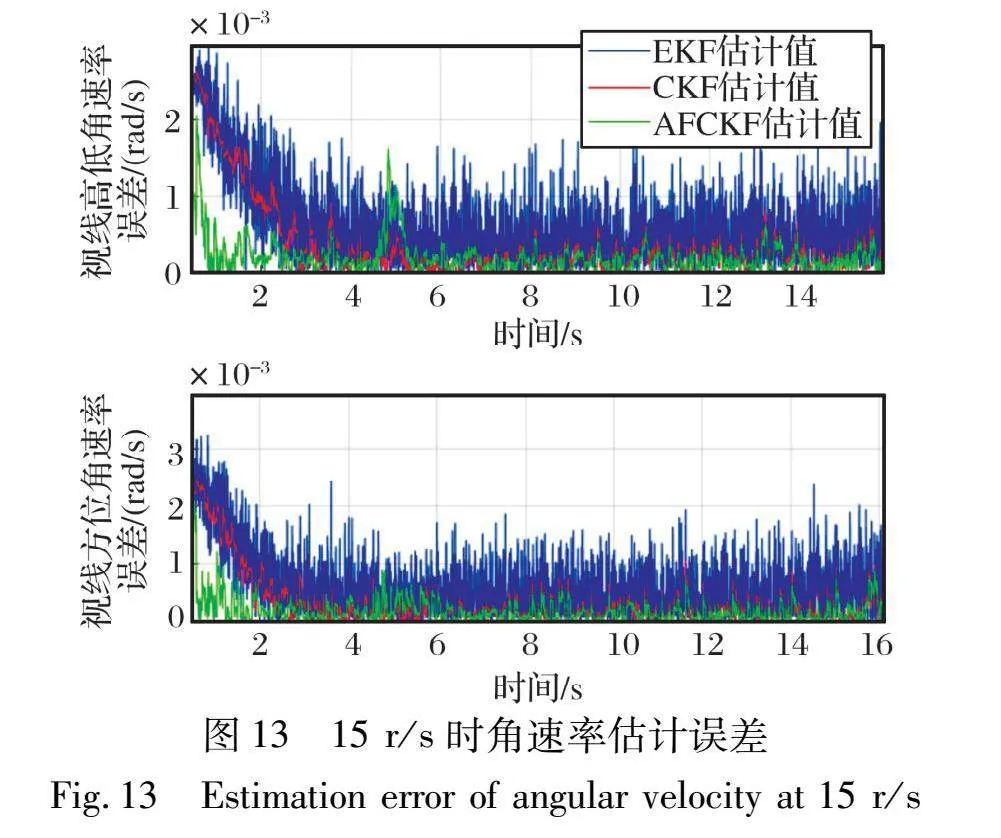
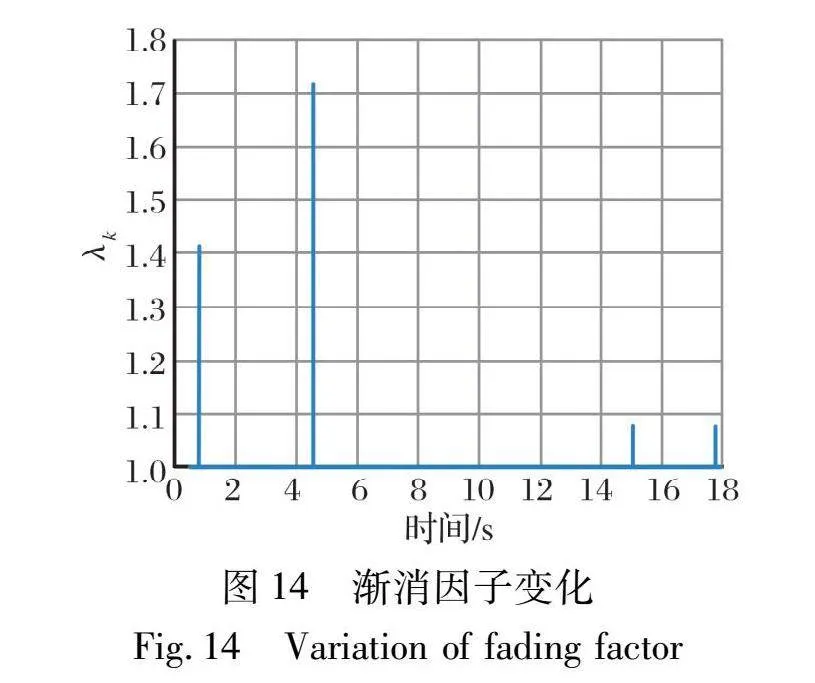
角速率估计误差如图13所示。 自适应渐消因子如图14所示。
图14中, 在4.4 s时, AFCKF的估计结果开始发散, 然而此时自适应渐消因子变大, 及时地调整了滤波增益, 有效地抑制了发散。 从图14可以看出, 渐消因子可以迅速变化, 从而快速遗忘错误的历史数据并调整滤波器到实际状态输入。 因此, 渐消因子在自适应衰减滤波器中起着重要作用, 能够帮助滤波器迅速适应外部环境的变化。
同时, 进行了 8 r/s 旋转弹药的仿真, 结果与15 r/s 旋转弹药结果类似, 不再给出相关的估计示意图, 只统计了误差等关键数据, 并用于和非旋转弹药及15 r/s 弹药的结果进行对比。
EKF和AFCKF的在各转速下视线高低角速率的绝对误差平均值如表1所示, 均方根误差(RMSE)如表2所示; 各转速下视线方位角速率的绝对误差平均值如表3所示, 均方根误差(RMSE)如表4所示。
从表1~4可以看出, 在15 r/s的情况下, AFCKF的视线高低角速率估计绝对误差平均值为EKF的30.41%, 均方根误差为EKF的35.10%, 视线方位角速率估计绝对误差平均值为EKF的42.18%, 均方根误差为EKF的49.16%, 估计精度满足比例导引所需要的视线角速率。 验证了AFCKF在旋转弹末制导段下具有更好的性能。
同时, 对比不同转速旋转弹下的估计精度可以看出, AFCKF比EKF受到的影响更小, 在转速增大的情况下, AFCKF保持了滤波的精度和稳定性。 随着转速的增大, AFCKF通过调整渐消因子的方式有效地抑制滤波器的发散, 使得滤波精度满足比例导引的需求。 和CKF相比, AFCKF具有更快的收敛速度, 在系统存在较大误差的情况下可以快速收敛到最优估计值, 使得估计结果收敛回误差范围内。
4 结 论
本文提出一种结合了CKF和渐消因子的AFCKF算法, 适用于末制导段捷联旋转弹的弹目视线角速率估计。 该算法有效解决了在弹体和导引头之间存在强耦合的情况下估计弹目视线角和角速率的问题。 仿真结果显示, 所提算法在准确性、 收敛速度和稳定性方面优于EKF和CKF。 在末制导阶段, 该算法具有更快的收敛速度, 从而实现更精确的弹目视线角速率输出。 未来的研究可以通过调整自适应渐消因子来提高该算法的性能, 实现更快的收敛速度。
参考文献:
[1] 孙婷婷, 储海荣, 贾宏光, 等. 捷联式光学图像导引头视线角速率估计[J]. 光学学报, 2014, 34(6): 0612010.
Sun Tingting, Chu Hairong, Jia Hongguang, et al. Line-of-Sight Angular Rate Estimation of Strapdown Optical Image Seeker[J]. Acta Optica Sinica, 2014, 34(6): 0612010.(in Chinese)
[2] Wang C, Liu Y S, Song J M. A Hardware-in-the-Loop Simulation for LOS Rate Estimation of Strapdown Seeker Based on EKF[C]∥14th International Conference on Control, Automation, Robotics and Vision (ICARCV), 2016.
[3] Zhu D, Zheng Y B, Xu W Y, et al. An Accurate Line-of-Sight Rate Estimation Method Based on LSTM Recurrent Neural Network for Strapdown Imaging Seeker[J]. IEEE Sensors Journal, 2022, 22(22): 21827-21836.
[4] 杨阳, 蔡正谊, 陈升泽, 等. 基于无迹卡尔曼滤波的捷联导引头视线角速率估计方法[J]. 兵器装备工程学报, 2019, 40(2): 215-218.
Yang Yang, Cai Zhengyi, Chen Shengze, et al. Study on LOS Angular Rate Estimation Based on UKF for Strapdown Seeker[J]. Journal of Ordnance Equipment Engineering, 2019, 40(2): 215-218.(in Chinese)
[5] 张韬, 张希铭, 王民钢. 全捷联导引头制导信息滤波算法及仿真[J]. 西北工业大学学报, 2015, 33(5): 744-749.
Zhang Tao, Zhang Ximing, Wang Mingang. Algorithm and Simulation for Guidance Information Filter for Strapdown Seekers[J]. Journal of Northwestern Polytechnical University, 2015, 33(5): 744-749.(in Chinese)
[6] Waldmann J. Line-of-Sight Rate Estimation and Linearizing Control of an Imaging Seeker in a Tactical Missile Guided by Proportional Navigation[J]. IEEE Transactions on Control Systems Technology, 2002, 10(4): 556-567.
[7] 庄朝文, 富立, 范跃祖. 一种基于假设检验的多重渐消卡尔曼滤波[J]. 北京航空航天大学学报, 2004, 30(1): 18-22.
Zhuang Chaowen, Fu Li, Fan Yuezu. Multiple Fading Kalman Filter Based on Hypothesis Testing[J]. Journal of Beijing University of Aeronautics and Astronautics, 2004, 30(1): 18-22.(in Chinese)
[8] 徐定杰, 贺瑞, 沈锋, 等. 基于新息协方差的自适应渐消卡尔曼滤波器[J]. 系统工程与电子技术, 2011, 33(12): 2696-2699.
Xu Dingjie, He Rui, Shen Feng, et al. Adaptive Fading Kalman Filter Based on Innovation Covariance[J]. Systems Engineering and Electronics, 2011, 33(12): 2696-2699. (in Chinese)
[9] Dang L J, Chen B D, Huang Y L, et al. Cubature Kalman Filter under Minimum Error Entropy with Fiducial Points for INS/GPS Integration[J]. IEEE/CAA Journal of Automatica Sinica, 2022, 9(3): 450-465.
[10] 罗亚伦, 廖育荣, 李兆铭, 等.高超目标强跟踪CKF自适应交互多模型跟踪算法[J/OL].北京航空航天大学学报, doi: 10.13700/j.bh.1001-5965.2022.0587.
Luo Yalun, Liao Yurong, Li Zhaoming, et al. Strong Tracking CKF Adaptive Interacting Multiple-Model Algorithm Based on Maneuvering Hypersonic-Target Tracking[J/OL]. Journal of Beijing University of Aeronautics and Astronautics, doi: 10.13700/j.bh.1001-5965.2022.0587. (in Chinese)
[11] 梁津鑫, 崔颢, 张公平. 强跟踪容积卡尔曼滤波在空空导弹制导中的应用[J/OL]. 航空兵器, doi: 10.12132/ISSN.1673-5048.2024.0004.
Liang Jinxin, Cui Hao, Zhang Gongping. Application of Strong Tracking Cubature Kalman Filter in Air-to-Air Missile Guidance[J/OL]. Aero Weaponry, doi: 10.12132/ISSN.1673-5048. 2024.0004. (in Chinese)
[12] 王炜强, 张跃坤, 贾晓洪, 等. 自适应方差卡尔曼滤波视线角跳变抑制技术[J]. 战术导弹技术, 2022(2): 90-97.
Wang Weiqiang, Zhang Yuekun, Jia Xiaohong, et al. LOS Angle Jump Suppression Technology by Adaptive Variance Kalman Filter[J]. Tactical Missile Technology, 2022(2): 90-97.(in Chinese)
[13] He S M, Lee C H, Shin H S, et al. Optimal Three-Dimensional Impact Time Guidance with Seeker’s Field-of-View Constraint[J]. Chinese Journal of Aeronautics, 2021, 34(2): 240-251.
[14] Elgamel S A, Soraghan J. Target Tracking Enhancement Using a Kalman Filter in the Presence of Interference[C]∥ IEEE International Geoscience and Remote Sensing Symposium, 2009.
[15] Wang Y D, He S M, Wang J, et al. Dynamic Estimation and Compensation of Time Delay for Missiles with Strapdown Seeker[J]. Journal of Guidance, Control, and Dynamics, 2022, 45(4): 781-791.
[16] Maley J M. Line of Sight Rate Estimation for Guided Projectiles with Strapdown Seekers[C]∥AIAA Guidance, Navigation, and Control Conference, 2015.
[17] 高昊, 范军芳. 捷联导引头视线角速率估计算法[J]. 电光与控制, 2021, 28(4): 26-28.
Gao Hao, Fan Junfang. An Algorithm for Estimating Line-of-Sight Angular Rate of Strapdown Seeker[J]. Electronics Optics & Control, 2021, 28(4): 26-28.(in Chinese)
[18] 王明志. 基于容积卡尔曼滤波的制导信息提取方法[D]. 哈尔滨: 哈尔滨工业大学, 2018.
Wang Mingzhi. Guidance Information Extraction Method Based on Cubature Kalman Filter[D].Harbin: Harbin Institute of Techno-logy, 2018. (in Chinese)
An Adaptive Fading CKF-Based Strapdown Rotating
Projectile Line-of-Sight Rate Filtering Algorithm
Xia Shuhan1, Fan Junfang1, Ji Yi1*, Wang Wei2, Chen Shiwei2, Ma Qiancai3
(1. School of Automation, Beijing Information Science and Technology University, Beijing 100192, China;
2. School of Aerospace Engineering, Beijing Institute of Technology, Beijing 100081, China;
3. Xi’an Modern Control Technology Research Institute, Xi’an 710065, China)
Abstract: In response to the strong coupling between line-of-sight angular rate and attitude error in the output of the strapdown rotating projectile, a method based on adaptive fading volume covariance Kalman filtering (AFCKF) is proposed. To achieve the decoupling of line-of-sight angular rate, the relative motion characteristics of missile and target are considered. A state model is constructed, which includes an estimation model of line-of-sight angular rate in the terminal guidance phase, and a measurement model including line-of-sight angle and attitude angular is established based on geometric relationships. To solve the problem of filter failure caused by the divergence of the line-of-sight angular rate estimation results in traditional CKF for rotating projectile, a fading factor based on residual sequence is introduced to adjust the predicted state covariance for quick convergence of the estimation results. To verify the effectiveness of AFCKF, typical interferences of attitude angle and measurement angle are considered. Simulation results show that the mean estimation errors of line-of-sight elevation rate and azimuth rate of the proposed method are 30.41% and 42.18% of the traditional EKF, respectively, effectively improving the accuracy of line-of-sight angular rate estimation for rotating projectil
Key words: rotating projectiles; strapdown seeker; line-of-sight rate; AFCKF; nonlinear filtering
