
基于ISO 11992标准的主挂车间容错通信浅析
2024-09-25 00:00张一鑫王远波陈姿霖
汽车电器 2024年9期




【摘 要】随着车辆电气化程度的提高,商用车主车和挂车间的连接由原来的机械连接逐步替换成电气连接。文章介绍国际通用标准中对主车和挂车间的专用通信要求,包含通信电压、通信的容错模式以及该协议的应用优势。
【关键词】单双线运行模式;商用车;挂车;协议;CAN
中图分类号:U463.6 文献标识码:A 文章编号:1003-8639( 2024 )09-0072-03
Requirements for Communication Between Tractor and Trailer Based on ISO 11992 Standard
ZHANG Yixin,WANG Yuanbo,CHEN Zilin
(Shaanxi Heavy Duty Automobile Co.,Ltd.,Automobile Engineering Research Institute,Xi'an 710200,China)
【Abstract】With the improvement of vehicle electrification,the connection between tractor and trailer of commercial vehicle is gradually switched from the original mechanical connection to the electrical connection. This paper introduces the special communication requirements of the international general standard between tractor and trailer,including the communication voltage,the fault-tolerant mode of communication and the application advantages of the requirements.
【Key words】single-and double-line operation mode;commercial vehicle;trailer;protocol;CAN
1 概述
ISO 11992协议定义了主车和挂车之间的通信要求,共包含4部分:通信的物理层、制动和行驶系应用层、制动和行驶系之外的设备应用层、诊断通信。ISO 11992协议与OSI模型的对应关系见表1。
本文主要介绍ISO 11992-1协议中的通信电压、单双线运行模式、协议的应用场景以及优势。
2 通信介绍
2.1 电压和参数要求
该协议所支持的CAN总线系统为24V和12V(简称Vs),差分电压Vdiff的计算见公式(1),总线电压见表2,位定时参数见表3。
Vdiff=VCAN_L-VCAN_H(1)
2.2 单双线运行模式
2.2.1 概述
该协议采用一种单双线容错冗余机制,当发生CAN_H断路、CAN_L断路、CAN_H对电源短路、CAN_L对电源短路、CAN_H对地短路、CAN_L对地短路总线故障时,启动单总线运行模式,确保数据的正确传输。当发生CAN_H和CAN_L短路、CAN_H和CAN_L均断路故障时单总线运行模式无法起作用,数据传输中断。
单总线模式指单独的CAN_H或CAN_L可以独立运行完成数据传输;双总线模式指CAN_H和CAN_L共同协同完成数据传输。
tr为初始化报文的重复时间。在<5tr时间内出现通信中断故障不启动单双线探测切换机制,在>5tr时间出现通信中断故障时需启动单双线探测切换机制,最后确定正确的运行模式。
在CAN_H断路、CAN_H对地短路、CAN_H对电源短路故障发生时,总线运行在CAN_L运行模式,应关闭CAN_H的主驱动器,用参考电压代替CAN_H的接收比较器的电压。在CAN_L断路、CAN_L对地短路、CAN_L对电源短路故障发生时,总线运行在CAN_H运行模式,应关闭CAN_L的主驱动器,将CAN_L的隐性电源切换到高阻抗状态,并用参考电压代替CAN_L的接收比较器的电压。
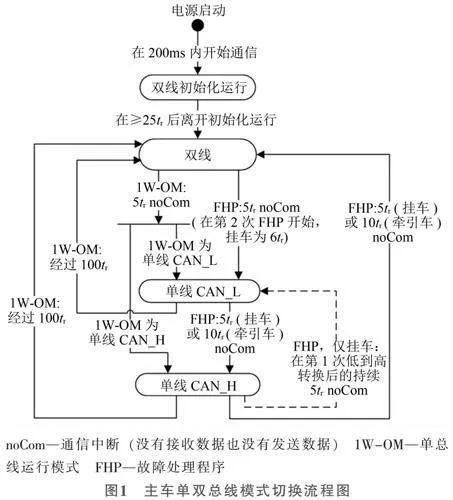
2.2.2 主车单双线运行模式
如图1所示,主车单双线运行模式检测机制步骤如下。
1)电源闭合后,在200ms内ECU开始通信发送总线报文,跳转到无故障检测的双线运行模式。
2)在无故障检测的双线运行状态下运行30tr时间后,跳转到有故障检测的双线运行模式。
3)在有故障检测的双线运行模式下,如果发现有>5tr时间通信中断,则跳转到单总线CAN_L测试模式。
4)到单总线CAN_L测试模式后,测试时间为10tr。如果通信中断,则跳转到单总线CAN_H测试模式;如果通信成功,则跳转到单总线CAN_L运行模式。
5)在步骤4)进入单总线CAN_L运行模式后,在100tr时间内,如果发现有>5tr时间通信中断则跳转到步骤4)的单总线CAN_L测试模式,并按照顺序执行;在单总线CAN_L运行模式中如果一直通信成功,100tr时间到后跳转到双线测试1模式;在双线测试1模式,如果通信成功则跳转到步骤3)的有故障检测的双线运行模式,并按照顺序执行;如果发现有>5tr时间通信中断再跳转到步骤5)的单总线CAN_L运行模式,并按照顺序执行。
6)在步骤4)进入单总线CAN_H测试模式后,在10tr时间内,如果通信中断则跳转到步骤3)的有故障检测的双线运行模式,并按照顺序执行;如果通信成功则进入单总线CAN_H运行模式。
7)进入单总线CAN_H运行模式后,在100tr时间内,如果发现有>5tr时间通信中断则跳转到步骤4)的单总线CAN_L测试模式,并按照顺序执行;在单总线CAN_H运行模式中如果一直通信成功,100tr时间到后跳转到双线测试2模式;在双线测试2模式,如果通信成功则跳转到步骤3)的有故障检测的双线运行模式,并按照顺序执行;如果发现有>5tr时间通信中断再跳转到步骤7)的单总线CAN_H运行模式,并按照顺序执行。
2.2.3 挂车单双线运行模式
如图2所示,挂车单双线运行模式检测机制步骤如下。
1)电源闭合后,在200ms内ECU开始通信发送总线报文,进入无故障检测的双线运行模式。
2)在无故障检测的双线运行模式下,运行30tr时间后离开该状态,进入有故障检测的双线运行模式。
3)在有故障检测的双线运行模式下,如果发现有>5tr时间通信中断,则跳转到单总线CAN_L第1次测试模式。
4)到单总线CAN_L第1次测试模式后,如果发现有>5tr时间通信中断,则跳转到单总线CAN_H第1次测试模式;如果通信成功,则跳转到单总线CAN_L运行模式。
5)在步骤4)进入单总线CAN_L运行模式后,在100tr时间内,如果发现有>5tr时间通信中断则跳转到步骤4)单总线CAN_L第1次测试模式,并按照顺序执行;在单总线CAN_L运行模式中如果一直通信成功,100tr时间到后跳转到双线测试2模式;在双线测试2模式,如果通信成功则跳转到步骤3)有故障检测的双线运行模式,并按照顺序执行;如果发现有>5tr时间通信中断,则跳转到步骤5)单总线CAN_L运行模式,并按照顺序执行。
6)在步骤4)进入单总线CAN_H第1次测试模式后,如果通信成功,进入单总线CAN_H运行模式;如果发现有>5tr时间通信中断,则跳转到单总线CAN_H第2次测试模式。
7)在步骤6)进入单总线CAN_H运行模式后,在100tr时间内,如果发现有>5tr时间通信中断,则跳转到步骤5)单总线CAN_L第1次测试模式,并按照顺序执行;在单总线CAN_L运行模式中,如果一直通信成功,100tr时间到后,跳转到双线测试3状态;在双线测试3状态,如果通信成功则跳转到步骤3)有故障检测的双线运行模式,并按照顺序执行;如果发现有>5tr时间通信中断,再跳转到步骤7)单总线CAN_H运行模式,并按照顺序执行。
8)在步骤6)进入单总线CAN_H第2次测试模式后,如果通信成功则跳转到步骤7)单总线CAN_H运行模式,并按照顺序执行;如果发现有>5tr时间通信中断,则跳转到单总线CAN_L第2次测试模式。
9)在步骤8)进入单总线CAN_L第2次测试模式后,如果通信成功,则跳转到步骤5)单总线CAN_L运行模式,并按照顺序执行;如果发现有>5tr时间通信中断,则跳转到双线测试1模式。
10)在步骤9)进入双线测试1模式后,如果通信成功,则跳转到步骤3)有故障检测双线运行模式,并按照顺序执行;如果发现有>6tr时间通信中断,则跳转到步骤4)单总线CAN_L第1次测试模式。
3 协议比对
商用车车内通信常用的CAN通信协议为SAE J1939。ISO 11992为商用车的主车和挂车之间的专用通信协议,该协议与SAE J1939协议的区别见表4。
由于主车与挂车之间通信采用硬线连接及弱电压差分信号,存在运行工况恶劣、线束磨损、信号干扰大等情况,造成主挂之间通信环境相比车内通信更加复杂,容易产生信号衰弱及中断等故障。经过相关组织的大量实际验证以及各主机厂的实际应用,ISO 11992定义的通信机制在抗地偏、抗干扰、抗衰减能力方面更加优越,通信可靠性进一步提升。
4 结束语
ISO 11992定义的商用车主车和挂车间的通信电压以及总线运行容错模式,相比其他总线协议在抗地偏、抗干扰、抗衰减能力方面更能保证主挂车之间的通信稳定性,目前国内外各主机厂和挂车厂家都在逐步应用,在相关零部件设计过程中可参考该协议进行。
参考文献:
[1] ISO 11992-1:2019,道路车辆 牵引车和挂车电气连接的数字信息交互 第1部分:物理层和数据链路层[S].
(编辑 杨凯麟)
作者简介张一鑫(1988—),男,硕士,工程师,主要从事商用车电器系统开发设计工作。
