
插电式混合动力汽车能量管理仿真分析
2024-09-25 00:00刘畅曹强
汽车电器 2024年9期











【摘 要】随着全球汽车保有量的急剧增加,随之而来的是一系列能量短缺和环境污染问题。混合动力汽车具有纯电动汽车和传统燃油车的优点,即有较长的行驶里程且排放较低。文章以插电式混合动力汽车为研究对象,运用纵向动力学相关知识搭建整车的仿真模型,以经典的规则策略控制发动机和电机的能量分配,系统分析电量消耗阶段(Charge Depleting Cycle,CD)、电量维持阶段(Charge Sustaining Cycle,CS)、电池荷电状态(State of Charge,SOC)、电机和发动机的转矩转速、制动力矩分配以及发动机单工况和百公里等效油耗,说明插电式混合动力汽车的性能优于传统燃油汽车。
【关键词】混合动力汽车;动力学方程;能量管理;控制策略
中图分类号:U469.72 文献标识码:A 文章编号:1003-8639( 2024 )09-0003-06
Simulation Analysis of Energy Management of Plug-in Hybrid Vehicles*
LIU Chang,CAO Qiang
(Intelligent Manufacturing and Automobile School of Chongqing Polytechnic Universityof Electronic Technology,Chongqing 401331,China)
【Abstract】With the rapid increase in global car ownership,a series of energy shortages and environmental pollution problems have emerged. Hybrid electric vehicles are a combination of pure electric vehicles and traditional fuel vehicles,combining the advantages of both,reducing emissions while also having sufficient driving range. This article takes plug-in hybrid electric vehicles as the research object,and uses longitudinal dynamics knowledge to build a simulation model of the entire vehicle. The classic rule strategy is used to control the energy distribution of the engine and motor. The system analyzes the Charge Depleting Cycle(CD)and Charge Sustaining Cycle(CS)conditions,battery SOC,motor and engine torque,braking torque distribution,and equivalent fuel consumption of the engine under single working condition and 100 kilometers . This demonstrates the superiority of plug-in hybrid vehicles in terms of performance compared to traditional fuel vehicles.
【Key words】hybrid electric vehicle;kinetic equations;energy management;control strategy
由于实际工况的不确定性和扰动极大地增加了混合动力汽车和插电式混合动力汽车能量管理策略设计的难度,因此开发高效、自适应的能量管理算法至关重要[1-2]。插电式混合动力汽车的能量管理是整车的重点,其功能是对每一时刻发动机和动力电池的输出功率进行分配,在保证动力性、安全性、舒适性等前提下,提高车辆的经济性以及其他性能,降低排放,比如综合考虑电池寿命的能量管理策略。因此,在已知整车驾驶载荷的情况下,如何做好2个能量源之间的功率分配,对插电式混合动力汽车的性能优化尤为重要[3-4]。除此之外,一个优良的车辆模型保证了研究内容的合理性。在对车辆进行能量管理的研究中,若搭建的车辆模型过于简单,则无法对制定策略进行有效验证;若车辆模型过于复杂,则会增加计算负担[5]。因此,本文选择基于纵向动力学对车辆进行建模,不考虑车辆的横向运动,对规则策略下插电式混合动力汽车的燃油经济性进行分析。
1 整车模型搭建
搭建仿真模型需在仿真软件中建立各系统子模型,科学设计控制策略并对整车性能进行仿真,进而验证动力系统仿真模型的正确性和精度,验证嵌入的控制策略的合理性及正确性,分析能量分配的最优性和节能减排的经济性。同时对仿真结果进行分析,能快速有效地找出控制策略设计的不合理之处,便于修改。搭建仿真模型可以缩减实车的研发周期,大大降低成本预算,对插电式混合动力汽车的研究有着极大的作用。
1.1 插电式混合动力汽车系统结构
插电式混合动力汽车是一种兼具纯电动汽车和纯燃油汽车主要特性的复合车型[6]。它融合了传统燃油汽车和电动汽车的两套系统,能外接电源充电,综合两者之间的优点,使得汽车既能做到零污染出行,又具有较佳的续驶里程[7-9]。根据驱动电机在整个动力系统的位置可以将这类车型划分为P0~P4结构,具体如图1所示。P2构型中电机位于发动机输出轴之后变速器之前,两者之间通过离合器断开,使得电机能单独驱动车辆以及对制动时的能量进行回收,同时变速器的存在使得电机并不需要太大的扭矩,是目前应用较多的一种构型[10]。因此,本文选择并联的P2构型作为研究对象,基于纵向动力学对能量分配问题进行仿真分析,以提高车辆的燃油经济性。所选车型的基本参数及性能指标见表1。
1.2 纵向动力学分析
纵向动力学将车辆看成一个质点,忽略侧向运动,整车的行驶阻力平衡方程式如下:
(1)
式中:Ff——滚动阻力;Fw——空气阻力;Fi——坡度阻力;Fj——加速阻力。
Ff阻力效应体现在轮胎内部摩擦产生弹性迟滞,使得轮胎变形时对它做的功有损失而不能全部收回,计算公式如下:
(2)
空气阻力Fw指汽车直线行驶时在行驶方向的分力,计算公式如下:
坡度阻力Fi指汽车上坡行驶时在重力沿着坡道方向的分力,计算公式如下:
(4)
加速阻力Fj指汽车加速行驶时需要克服其质量加速运动的惯性力,计算公式如下:
上述式中:m——汽车质量,kg;g——重力加速度,m/s2;f、α——滚动阻力系数和道路坡度;CD——空气阻力系数;A——迎风面积,m2;u——车速,km/h;δ——旋转质量换算系数。
将整车行驶总阻力平衡方程乘以车速并进行单位转换,得到车辆功率平衡方程式如下:
(6)
以上即为能量源应提供的整车需求功率,η是传动系的效率。
1.3 仿真模型搭建
研究整车控制策略对插电式混合动力汽车性能的影响,需要建立精准的动力系统模型。本文利用MATLAB/Simulink仿真平台,基于稳态试验数据,不考虑模型的内部工作过程,通过反映发动机燃油消耗率、电机效率与转速、转矩之间关系的二维插值表建立发动机及驱动电机黑箱模型[11]。车辆发动机万有特性图和电机效率Map图如图2、图3所示。
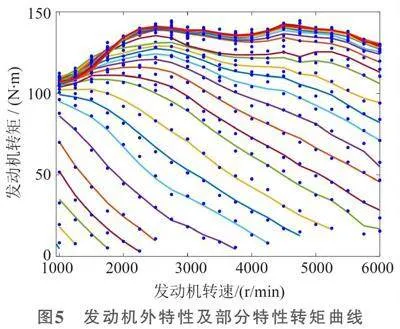
所建发动机模型峰值功率为80kW,最大扭矩为140N·m,最大转速为6000r/min,最大扭矩转速3000~5000r/min,额定功率40kW。
所建电机模型峰值功率为100kW,最大扭矩为160N·m,最大转速为12000r/min,额定功率75kW,额定转速为6000r/min,额定转矩为120N·m,额定电压为315V。
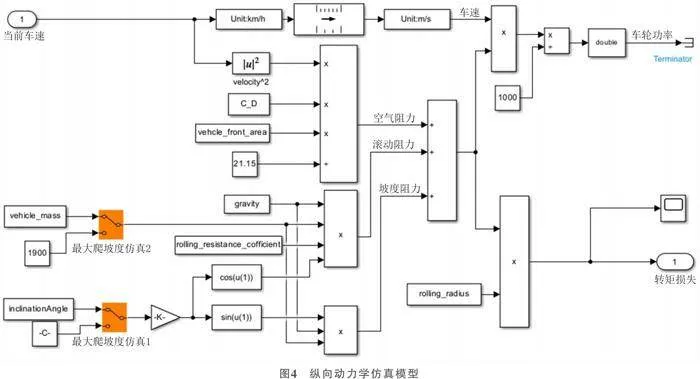
驾驶员踩下油门踏板或制动踏板后,控制策略根据所需功率对能量进行分配,发动机、电机输出功率经传动系传递至车轮,车辆驱动力在克服滚动阻力和空气阻力的同时,将多余的力用于克服加速阻力或者坡度阻力,使得车辆能够加速行驶或者爬上一定坡度的坡道,其纵向动力学仿真模型如图4所示。
1.4 仿真模型验证
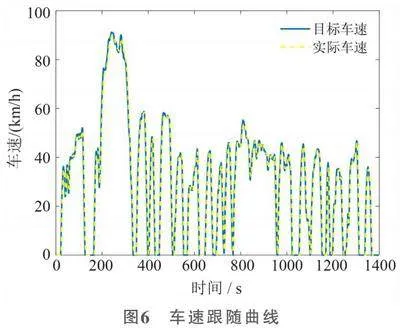
动力性指标的衡量因素主要有汽车的加速时间、最大爬坡度和最高车速。本文采用的插电式混合动力汽车0—100km/h加速时间为8s,最大爬坡坡度imax为20%,最高车速为180km/h。在仿真平台建立整车动力系统模型后,需对模型的准确性进行验证。图5为发动机外特性及部分特性仿真结果和试验数据的对比,其反映出的仿真结果与试验数据基本一致。图6为UDDS循环工况下的车速跟随曲线,可以看出所建立的模型对驾驶员需求功率响应迅速准确。除此之外,对整车动力性能指标的验证也非常关键。
由滚动阻力和空气阻力的计算公式可知,随着车速的增加,两者的大小随之增加。当汽车以最高挡行驶,节气门全开时,滚动阻力和空气阻力之和等于汽车驱动力时的车速即为最高车速,见式(7),此时汽车处于稳定的平衡状态。如图7所示,仿真模型中车速达到182km/h后趋于稳定状态,为模型所能达到的最高车速,满足目标车辆的指标值。
(7)
由于汽车加速度测量较为困难,因此可由加速时间表征汽车的加速能力。从汽车最低稳定车速开始,以最佳动力性换挡,行驶至100km/h车速需要的时间即为车辆的0—100km/h加速时间。由式(8)汽车行驶方程得到水平直线路面的加速度,再对时间进行积分得到车辆的速度,如图8所示,仿真模型百公里加速时间为7.6s,满足目标车辆性能指标。
利用汽车平衡方程式求解车辆1挡时的最大爬坡度如下:
(9)
即:
通过式(10)求出道路坡度角后,可根据式(11)求出相应的坡度值。
(11)
由理论可知,最大爬坡度位于1挡,在仿真模型中以车速线性变化得到汽车滚动阻力和空气阻力之和,将节气门开度设为100%,发动机以外特性曲线输出扭矩,同时以动力性规律换挡,得到图9所示的1~6挡对应的爬坡度曲线。1挡爬坡度的最大值24%即为车辆的最大爬坡度,满足目标车辆的性能指标。
2 控制策略设计
混合动力汽车的能量管理控制策略目前大致可分为基于规则、基于优化和基于学习3大类[12]。基于规则的能量控制策略是通过人类先知经验和专业知识制定的,其方法较为固定,不需要预知行驶工况信息,鲁棒性强,有较好的稳定性和可靠性,易于实现[13]。因此,本文选择规则策略对所选车型的能量分配问题进行讨论分析。
2.1 规则策略框架
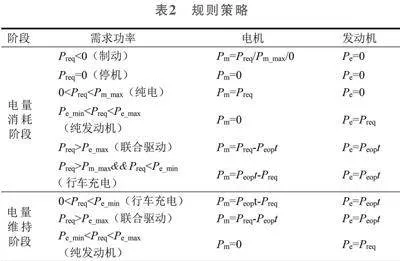
插电式混合动力汽车与其他混合动力汽车相比,可以通过外接电源充电,因此优先消耗电池的电量是提升车辆燃油经济性的一种有效途径。但动力电池的荷电状态SOC较低时,电池性能较差,因此深度放电对电池的寿命影响很大,这使得整车综合成本升高。设置一个放电下限是一种有效的解决方案,根据所建电池模型放电特性,设置其放电SOC下限值为0.3。在充分考虑混合动力系统本身所受的机械和性能两大约束条件基础上设计规则策略框架。机械约束主要包括电机的转矩转速范围与发动机,性能约束在文中指电池的理想充放电范围,可用公式表达为:
(12)
(13)
(14)
(15)
(16)
式中:Te_min、Te(t)、Te_max——发动机最低转矩、t时刻输出转矩和最高转矩;Tm_min、Tm(t)、Tm_max——电机最低转矩、t时刻输出转矩和最高转矩;ωe_min、ωe(t)、ωe_max——发动机最低转速、t时刻转速和最高最速;ωm_min、ωm(t)、ωm_max——电机最低转速、t时刻转速和最高转速;ξ——电池SOC值。
在满足驾驶员动力性要求的前提下考虑动力源能量分配与管理问题,必须首先考虑动力性能及动力源输出要求。根据本文所采用的插电式混合动力汽车结构,发动机和电机的转矩、转速应满足如下公式:
(17)
(18)
式中:Treq——车轮需求转矩;i——传动系速比;ωreq——车轮转速。
规则策略具体方案见表2。
2.2 制动策略设计
当需求功率小于0时,即车辆处于制动状态,根据制动强度的大小以及电池SOC的状态,在保证制动稳定性和安全性的前提下,合理分配电机再生制动和机械制动功率可进一步提高能量利用率。本文根据制动强度的大小及电池SOC状态将制动分为3种模式:当制动强度较小时,通过拖动电机再生制动回收部分能量,不足部分由前轮制动提供;当制动强度一般时,除电机再生制动外,不足部分由前后轮同时提供制动力;当制动强度较大时,则完全采用机械摩擦制动。前后轮制动力大小根据不同模式分别由再生制动、机械制动相结合的m曲线和纯机械制动且前后轮制动力矩成固定比例的β线决定。如图10所示。
3 仿真结果分析
将控制策略嵌入模型中,采用城市道路循环工况UDDS(Urban Dynamometer Driving Schedule)对整车模型进行仿真,当电池电量较高时,优先使用电量,即CD阶段,此时电机作为主动力源。图11为车速、电池SOC和电机的转矩转速曲线图,图中车速较高时,电机转速随之提高,平均转速位于4000~5000r/min之间。需求功率较大时,电池SOC下降较快,在200~400s处;需求功率较小时,电池SOC变化较为平稳,因此电机转矩转速与车速、电池SOC变化密切相关。
图12为循环工况下机械制动和再生制动转矩分配变化情况。由图可知,制动需求转矩较小时,主要由再生制动提供转矩,提高能量的利用率;当制动需求较大时,大部分转矩由机械制动提供,小部分由电机回收。
当电池SOC消耗至下限值时,发动机启动,进入CS阶段,此时发动机作为主要能量源,电池SOC维持在0.3附近。图13为发动机的转矩转速、电池SOC和车速的关系图,可以看到电池SOC始终在0.3附近波动,发动机输出转矩大部分为较为经济的100N·m区域,在满足需求功率的同时多余的能量为电池充电,这避免了发动机在经济性较差的区域工作。
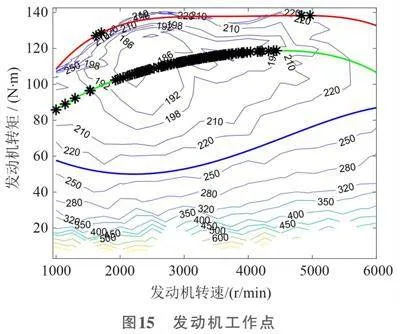
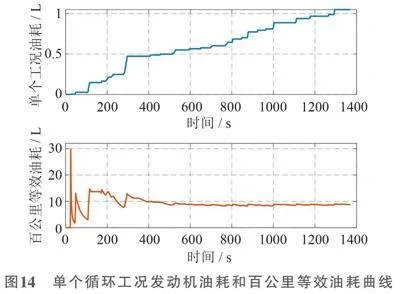
图14为单个循环工况下的发动机油耗和百公里等效油耗曲线,UDDS工况一个循环里程为12.07km,电量维持阶段单个工况发动机油耗为1.05L,百公里等效油耗为8.756L。发动机工作点如图15所示,可以看到其大部分位于最佳经济曲线上,少部分位于外特性曲线上。可以看出,由于电池的存在,使得发动机工作点的选择较为灵活,从而提高发动机的燃油经济性。
4 总结
本文基于纵向动力学对P2构型的插电式混合动力汽车能量管理进行研究与分析,验证了仿真模型的有效性后,设计了规则策略并代入模型,分析了CD阶段和CS阶段下车速与电池SOC、电机和发动机的转矩转速关系曲线、制动时力矩分配曲线以及发动机单工况和百公里等效油耗,仿真结果显示插电式混合动力汽车在电池电量较高时,基本由电机提供动力,在电量较低时发动机开启,电池SOC维持在设定的下限值附近,此时由于电池的存在,可调节发动机在较佳的经济性区域工作,在行程结束后可通过外接电源为电池充电,相较于传统燃油汽车,大大降低了车辆的运行成本。
目前比较先进的策略是运用机器学习相关的知识来实现能量分配的优化。例如采用深度强化学习让代理与环境交互,通过设置奖励,整个算法逐渐收敛最终找到一个最佳的策略使得发动机油耗最低。随着智能网联的发展,通过实时获取交通信息,准确规划整个车辆的行程,运用全局优化算法得到最优解将成为可能。
参考文献:
[1] Lin Xinyou,Wu Jiayun,Wei Yimin. An ensemble learning velocity prediction-based energy management strategy for a plug-in hybrid electric vehicle considering driving pattern adaptive reference SOC[J]. Energy,2021,234(1):121308.1-121308.14.
[2] Yong W,Yuankai W,Yingjuan T,et al. Cooperative energy management and eco-driving of plug-in hybrid electric vehicle via multi-agent reinforcement learning[J]. Applied Energy,2023,332(15):120563.1-120563.12.
[3] 张乔. 基于并行计算的混合动力汽车等效燃油消耗最小策略研究[D]. 重庆:重庆理工大学,2022.
[4] 彭韵寒. 基于强化学习的插电式混合动力汽车能量管理策略研究[D]. 重庆:重庆大学,2019.
[5] Renzong Lian,Jiankun Peng,Yuankai Wu,et al. Rule-interposing deep reinforcement learning based energy management strategy for power-split hybrid electric vehicle[J]. Energy,2020,197(15):117297.1-117297.9.
[6] 马博岩. 插电式混合动力汽车复合储能系统设计及能量管理与优化研究[D]. 秦皇岛:燕山大学,2022.
[7] 宋鹏翔. 插电式混合动力公交车工况预测与智能能量管理策略研究[D]. 长春:吉林大学,2021.
[8] Xinyou L,Jiayun W,Yimin W. An ensemble learning velocity prediction-based energy management strategy for a plug-in hybrid electric vehicle considering driving pattern adaptive reference SOC[J]. Energy,2021,234(1):121308.1-121308.14.
[9] Ningyuan G,Xudong Z,Yuan Z,et al. Real-time predictive energy management of plug-in hybrid electric vehicles for coordination of fuel economy and battery degradation[J]. Energy,2021,214(1):119070.1-119070.20.
[10] J Ruan,C Wu,Z Liang,et al. The application of machine learning based energy management strategy in multi-mode plug-in hybrid electric vehicle,part I:Twin Delayed Deep Deterministic Policy Gradient algorithm design for hybrid mode[J]. Energy,2023,262(15):126792.1-126792.13.
[11] 隗寒冰. 重度混合动力汽车油耗和排放综合控制策略研究[D]. 重庆:重庆大学,2012.
[12] 薛四伍. 基于深度强化学习的混合动力汽车能量管理策略研究[D]. 南京:南京航空航天大学,2021.
[13] 李央. 基于锂电池和超级电容的车用混合动力系统能量管理研究[D]. 杭州:浙江大学,2021.
(编辑 杨凯麟)
*基金项目:重庆市教育委员会科学技术研究项目(KJQN202303129)。
作者简介刘畅(1996—),女,助教,从事汽车电子、深度学习研究工作;曹强(1985—),男,讲师,从事动力电池管理系统、复杂系统建模与预测控制研究工作。
