
基于BSO⁃BP改进动态帧时隙算法的密集环境下RFID标签读写优化方法
2024-09-20 00:00:00王思源洪涛姜逸璇
现代电子技术 2024年8期
关键词:BP神经网络




















摘" 要: 无线射频识别技术作为物联网的关键技术,正在不断发展并广泛应用于我国制造业领域。为了解决大量无线射频识别标签读写时相互竞争信道而产生的数据碰撞现象,需要对标签数量进行准确估计。文章在传统动态帧时隙算法的基础上,利用天牛群搜索算法寻找BP神经网络的最优初始权值和阈值,并将最优值应用到BP神经网络的参数设定中,实现了对标签数量的准确估计。通过实验和企业实际使用RFID绑定电源线的生产效果证明,与传统的动态帧时隙算法相比,所提出的改进算法既保证了读取的准确性,又缩短了读取时间,有效地提高了系统的效率。
关键词: 无线射频识别技术; 动态帧时隙; 密集环境; BSO算法; BP神经网络; 天牛群搜索算法
中图分类号: TN915.04⁃34" " " " " " " " " " " " " 文献标识码: A" " " " " " " " " " " 文章编号: 1004⁃373X(2024)08⁃0061⁃07
Optimization method for RFID tag reading and writing in dense environments based on BSO⁃BP improved dynamic frame time slot algorithm
WANG Siyuan, HONG Tao, JIANG Yixuan
(College of Quality amp; Safety Engineering, China Jiliang University, Hangzhou 310018, China)
Abstract: Wireless radio frequency identification technology, as a key technology of the Internet of Things, is constantly developing and widely applied in the manufacturing industry of China. In order to solve the data collision phenomenon caused by the competition of channels during the reading and writing of a large number of wireless radio frequency identification tags, accurate estimation of the number of tags is required. On the basis of the traditional dynamic frame time slot algorithm, the Tian Niu swarm search algorithm is used to find the optimal initial weight and threshold of the BP neural network, and the optimal value is used to the parameter set of BP neural network, achieving accurate estimation of the number of labels. The production effect of RFID (radio frequency identification) bound power cords by experiments and actual use by enterprises proves that, in combination with the traditional dynamic frame time slot algorithm, the proposed improved algorithm can not only ensure the accuracy of reading, but also shorten the reading time, effectively improving the efficiency of the system.
Keywords: RFID; dynamic frame time slots; dense environment; BSO algorithm; BP neural network; Tian Niu Qun search algorithm
0" 引" 言
无线射频识别技术(Radio Frequency Identification, RFID)作为物联网的一种关键技术,正在不断发展,在我国制造领域得到广泛的应用。根据应用对象的实际生产背景、工艺、流程等,RFID技术会呈现不同的使用效果,实现了实时监控、质量追溯、自动化生产等目标,更好地辅助生产[1]。在实际应用中,企业生产电源线现场环境复杂,标签绑定在无规律摆放的电源线上,读写器需要在众多摆放密集的标签之间读取信息,因此常常会受到其他标签信息干扰,使得标签性能总体降低,最终导致部分标签出现漏读的现象。
燕怒等人通过检测不同输入阻抗、雷达散射面积等值,并且考虑了在密集环境下,标签天线会发生相互影响的现象,建立了一个网络模型来分析标签天线的阻抗,并通过暗箱测试得出测试距离,以及仿真计算得出标签天线的最大识别距离[2]。周伟辉等人提出一种新算法,将分组动态帧和混合查询树相结合,以提高在大量标签的使用场景下的整体吞吐率,将每一次没有识别出来的标签通过标识分组,提高了吞吐率,有效解决了标签碰撞的问题[3]。M. Golsorkhtabaramiri等人提出一种分布式方法和信道监听技术,以有效地读取密集RFID网络中的所有标签。该方法通过几何概率分布函数选择时间间隔以获取控制信道,并且通过测量来自相邻读取器的信号强度并共享标签信息,利用无线电波增加识别系统的吞吐量,同时避免控制信道中的各种冲突[4]。Su Z等人提出了一种基于相邻信息的多通道RFID读写器防冲突协议,以解决RFID系统中可能发生的读写器冲突问题[5]。
考虑到实际情况的多变性,已有研究利用动态帧时隙算法,该算法可以确保在标签数量动态变化的情况下系统依旧以最大效率运行[6⁃7]。但是动态帧时隙算法初始帧的长度不定,没有参考帧长,当出现起始帧长度与标签总数相差较大的情况,RFID系统将对所有标签进行识别,进而确定调整方案。故本文利用天牛群改进BP神经网络的动态帧时隙算法来准确估计标签数量,提高读取效率,提升系统吞吐率。
1" RFID系统读取关系模型研究
RFID系统读取关系模型的数学分析部分是将密集环境下的众多标签与单个读写器数据交换的过程转换成数学模型。本文的主要目标是建立一个RFID系统读取关系模型,在读写器输出功率大小以及读写器和标签之间距离高度限制的条件下,找出一种在多标签情况下读写的最佳条件。
根据在自由空间中传播损耗原理可知,当传播路径越长时,传播损耗越多,电磁波的信号传播影响越小。在读写器读取信息过程中,存在RFID标签密集摆放的情况。在RFID系统中,由读写器向标签发送信号,RFID标签接收该信号,最后将处理好的数据发送给读写器。读写器开始发射出的信号在经过前向和反向的传播后,期间损失的能量可能无法满足读写器天线的激励要求。通常,通过读写器中RSSI信号值来作为判断RFID系统性能的好坏指标[8]。电源线RFID标签读写变量关系模型如图1所示。
图1中各符号的含义如下:
1) [D1]~[D5]:电源线上捆绑的标签1~5;
2) [U]:读写器信号发射时距离标签D1的距离;
3) [M]:标签之间纵向的距离;
4) [N]:标签之间横向的距离;
5) [P]:读写器输出功率;
6) [Pj1]:电源线上标签[D1]接收到读写器发送的信号功率;
7) [Pf1]:电源线上标签[D1]返回给读写器的信号功率;
8) [Tr]:电源线上标签[D1]返回的信号输送给读写器所在位置的功率;
9) [T'r]:电源线上标签[D4]返回的信号输送给读写器所在位置的功率。
为了使RFID系统读写能够达到最优的情况,设立限定条件来满足读写的需要,即:将RFID标签[D1]返回的信号输送给读写器所在位置的功率[Tr]需要尽可能得大,以此来保证返回到该位置时的功率能够达到信号值的最低限度;读写器输出信号的位置距离标签[D1]的距离[U]也要尽可能得短[9⁃10]。
综上所述,建立的数学模型如下:
目标函数:
[k1=maxTrk2=minU] (1)
式中:[k1]表示电源线上标签[D1]返回的信号输送给读写器所在位置的功率的最大值;[k2]表示读写器信号发射时距离标签[D1]的距离的最小值。
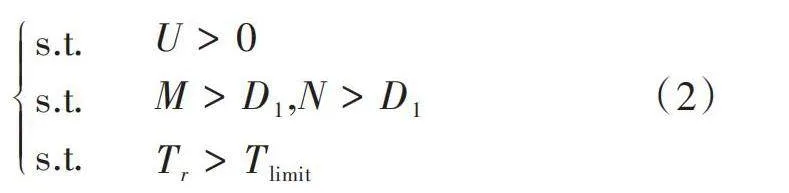
约束条件:
[s.t.s.t.s.t.Ugt;0" " " " " " " " " Mgt;D1,Ngt;D1Trgt;Tlimit" " " " " " ] (2)
式中[Tlimit]表示电源线工作的标签返回的信号输送给读写器所在位置的临界值。
将建立的电源线生产过程RFID系统读取关系模型与本文重点研究的改进动态帧时隙算法相结合,用实际的生产效果展现RFID系统最佳的读写性能。
2" 改进动态帧时隙算法优化研究
在使用单个读写器进行读写多个标签时,标签的响应会出现一系列的数据碰撞,造成读取效率低的现象[11]。现在很多改进动态帧时隙算法虽然提高了RFID系统的识别率,但是一定程度上加重了读写器的负担,读取的时间变久了,算法的复杂度也变高了。本研究针对这种现象,提出一种改进算法,能够有效地解决基础动态帧时隙算法带来的局限性。
2.1" 基于BSO⁃BP神经网络模型搭建
在密集环境中,读写器会因为接收来自不同方位RFID标签发射的信号而造成数据紊乱,受到该密集环境下非线性的影响。目前在对动态帧时隙算法的研究中,由于BP神经网络的非线性映射能力强,这一特性满足对动态帧时隙算法的建模需求[12⁃13]。选择合适的参数是提升BP神经网络算法训练精度的关键因素。由于参数的随机性,可能会限制算法收敛速度并陷入局部最优,因此有必要设计有效的参数优化策略,以更快地收敛至全局最优,从而提高模型的准确率[12,14]。因此,本文采取利用天牛群搜索算法来改进BP神经网络(BSO⁃BP)的算法,其模型建立流程如图2所示。
模型建立步骤如下:
1) 定义模型结构。该模型结构为3⁃5⁃5⁃1。其中3表示为BP神经网络输入层神经元个数为3个,分别表示为空闲时隙数[n1]、成功读取到标签时的时隙数[n2]、碰撞时隙数[n3];5为隐含层神经元个数,共有2个隐藏层;1表示为输出层的神经元个数,表示估计标签的数量[ne]。BP神经网络结构图如图3所示。
2) 设置感知因子[mt]。通过设定足够大的初始步长[mt]来控制天牛的搜索区域,以免陷入局部最优。在学习天牛群最优时,采取定向学习策略。感知因子[mt]公式如下:
[mt=Mmax-Mmax-Mmingt-gtmingtmax-gtavgMmax," gt≥gtavgmt=Mmax," gtlt;gtavg] (3)
式中:[gt]、[gtmin]、[gtmax]和[gtavg]分别表示经过[t]次迭代后天牛单个个体的适应度、天牛群体的最小适应度、天牛群体的最大适应度以及天牛群体平均适应度。
3) 适应度函数的确认。测试数据的误差和适应度评价函数两者将被用来促进空间区域的搜索能力。适应度函数如公式(4)所示:
[fit=i=1NRi-R'i] (4)
式中:[N]代表训练所需的样本数量;[Ri]为第[i]个样本的输出值;[R'i]为第[i]个样本的实际值。
4) 初始化天牛群。使用Tent映射创建良好的初始天牛群,并为每只天牛分配随机向量。
5) 评估。根据公式(4)来计算初始位置的适应度函数值。
6) 更新天牛位置。
7) 更新解。利用已知天牛个体的位置坐标,通过算法计算公式得到天牛个体适应度[gt]与天牛群体的平均适应度[gtavg]。根据公式(3)和公式(5)更新单个天牛的位置,并调整和更新BP神经网络的阈值与权值,以计算当前坐标下的适应度函数值,实现解的更新。
[Yt+1=Yt-mtsignfYtsr-fYtslX+dtδYszbest-Yst] (5)
式中:[mt]表示感知因子;[signfYtsr-fYtslX]表示感知方向,在经过[t]次迭代的气味浓度基础上,若左须的适应度值大于右须,[sign·]取1,天牛往左须方向移动,反之,则相反;[dtδYszbest -Yst]表示学习策略,[dt]表示学习因子,[Yszbest]表示天牛群中表现效果最好的个体,[ δ]为服从(0,1)随机分布的随机值,[Yszbest-Yst]表示在经过[s]次迭代中,比较天牛群体最优个体和单个天牛个体,以便考虑天牛群体最优个体对单个天牛个体的指导作用。
8) 控制迭代更新。确定满足下述条件时,执行步骤9):适应度函数值达到设定精度(0.02)和最大迭代次数(20 000),否则,返回步骤6)。
9) 生成最优解。当算法迭代完成时且适应度函数值达到设定的精度0.02或迭代次数达到20 000代时,BP神经网络训练将得到最优初始权值和阈值,并将其输入至BP神经网络中进行二次训练,最终输出标签预测模型[MN]。
2.2" 估计剩余标签数
每轮读写器检测到的空闲时隙数[n1]、成功时隙数[n2]、碰撞时隙数[n3]和估计剩余标签[ne],两者本质上是一种函数关系[F],如式(6)所示,可以用来表示在某一时刻,标签的重新分布状态和新的估计值之间的关系。
[ne=Fn1,n2,n3] (6)
使用改进后的BP神经网络模拟目标函数,通过执行一个复杂的离线训练过程,可以获得准确的模型,并使用一个简单的向前计算过程来估计剩余标签的数量,从而实现对目标函数的预测。整体的标签估计算法流程如图4所示。
通过将动态帧时隙得到的时隙数代入本节得出的BSO⁃BP模型实现标签数估计,具体流程如下:
1) 利用式(7)~式(10)计算出不同待读取标签数[n]处于不同帧长[N](假设待读取标签数[n∈0,1,2,…,5N])时期的时隙空闲数[n1]、成功读取数[n2]、碰撞数[n3]、估计剩余标签数[ne]。
[n1=nP1] (7)
[n2=nP2] (8)
[n3=nP3] (9)
[ne=n-n2]" " " (10)
式中:空闲时隙概率为[P1];成功时隙概率为[P2];碰撞时隙概率为[P3]。[n1]、[n2]、[n3]组成数据集[TN=nen1,n2,n3]。
2) 每个帧长度对应的[TN]数据集分别输入网络中进行训练,网络指标收敛后,得到相应帧长为[N]的网络模型[MN]。
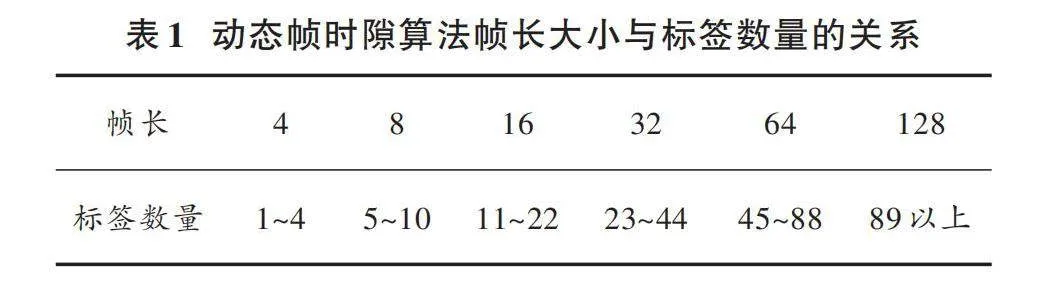
3) 把读写器每轮的阅读周期检测到的实际空闲时隙数、成功时隙数、碰撞时隙数(n1、n2、n3)输入相应的网络模型[MN],最终输出估计剩余标签数[ne],阅读器根据表1调整下一次读写周期帧长。
3" 仿真及性能分析
3.1" 仿真实验设计
本节通过将改进后的BSO算法应用于BP神经网络来优化阈值和权值,提升BP神经网络对RFID标签的估计运算能力,并且可以减少读取标签的时间消耗,同时也保证了标签估计性能的精密度。实验阶段对BP、BSO⁃BP和传统的Vogt[15]结合动态帧时隙算法进行了比较。
假设帧长为[F],待识别标签数目为[n],则任意一个时隙中同时存在[x]个标签响应阅读器的概率如式(11)所示:
[Bn,1Fx=nx1Fx1-1Fn-x] (11)
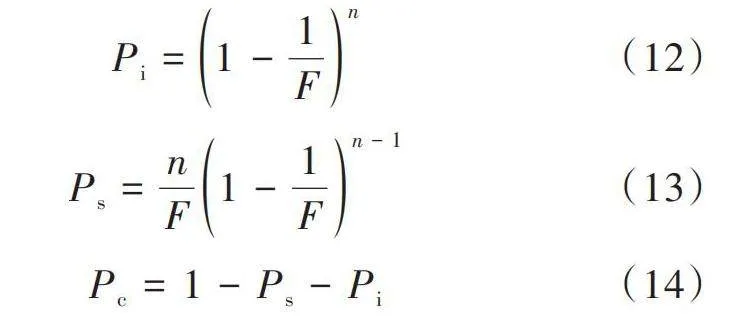
通过式(11)可以得出空闲时隙概率[Pi]、成功时隙概率[Ps]和碰撞时隙概率[Pc],如下:
[Pi=1-1Fn] (12)
[Ps=nF1-1Fn-1] (13)
[Pc=1-Ps-Pi] (14)
一帧结束后产生的各种时隙数估计值[si]、[ss]和[sc]如下:
[si=FPi=F1-1Fn] (15)
[ss=FPs=n1-1Fn-1] (16)
[sc=F-si-ss] (17)
3.2" 性能分析
3.2.1" 数据预处理
使用Matlab 2019作为实验的仿真平台,对本节中改进的RFID标签数量估计算法进行仿真验证,并将其与BP神经网络以及基于Vogt估计算法的动态帧时隙算法进行比较。
数据预处理阶段,将数据进行归一化、数据洗牌以及选择8折的交叉验证处理操作,将学习率设置为0.02,最大迭代数设置为20 000,激活函数采用softsign函数,该函数随着定义域取值的变大,其函数图像不断趋近于1,而随着定义域的缩小,函数图像逐步趋近于-1。函数图像在靠近定义域中心0时速度变快,但是分散到两端相对平滑。图5展示了softsign(x)函数与tanh(x)函数的对比图像。从图中可以看出,由于softsign(x)函数在原点附近的平滑性,它在梯度下降过程中提供了更稳定的性能,这有助于避免在训练神经网络时出现的梯度消失问题。这种特性使得softsign(x)函数在本应用场景下优于tanh(x)函数,尤其是在处理极端输入值时。同时,损失函数采用均方误差(MSE)函数。
训练结果如图6所示。当迭代次数为100次时,最后的损失值即均方误差为0.005 2。
3.2.2" 算法效率分析
常用评价标签阅读效率的指标一般为以下两种:一是系统吞吐率;二是消耗时隙数。在动态帧时隙算法中,系统吞吐率定义为:在一次读取中,成功识别的标签数与总共消耗时隙数的比值。仿真实验中将初始帧长固定为128,系统吞吐率对比结果如图7所示。经过天牛群改进BP神经网络后的吞吐率稳定在0.35左右,效果明显优于未经过天牛群改进的BP神经网络与传统Vogt算法。
另外一种衡量指标是系统在一次阅读过程中消耗的总时隙数。消耗的总时隙数越少,表明对剩余标签数量估计越准确。三种算法消耗时隙数的对比结果如图8所示。经过天牛群改进BP神经网络后的动态帧时隙算法消耗的时隙数明显少于未经过天牛群改进的BP神经网络与传统Vogt算法消耗的时隙数。
3.2.3" 时间消耗分析
因为本文改进的算法复杂程度不同,每次读取的系统消耗时间也会有不同。本文提出的基于天牛群改进BP神经网络的标签估计算法在实际读取过程中,网络的前向计算只是计算了复杂度较低的矩阵乘法,同时使用了softsign激活函数,与传统的BP神经网络以及Vogt算法相比较,大大降低了算法的复杂度。
在实验中,进行了15 000次的读取,统计汇总三种算法的总消耗时间,对比结果如表2所示。
从表2可以得出,经过天牛群改进BP神经网络后的动态帧时隙算法相较于Vogt与BP神经网络的动态帧时隙算法消耗的时间明显少很多,效果更好。因此,本文提出的基于天牛群改进BP神经网络的动态帧时隙算法在效率上比传统的方法高很多,系统吞吐率及消耗时隙数等指标也更好,在消耗时隙数上的情况下能够达到更高的吞吐率,更加准确地预估标签数目、帧长,从而提高整个读取系统的效率。
3.3" 系统验证
针对密集环境下电源线RFID标签信息读取能力,在实际生产中进行了验证。本次验证以车间一周内加入基于天牛群改进BP神经网络的动态帧时隙算法前后的读写器对电源线读取数量设置为验证对象,以某一周的电源线绑定的标签数量以及漏读数量作为评价指标,以此来判断本次改进对企业实际生产过程的能力提升效果,直观地展现数据读写的准确性与系统的效率。基于改进前后的手持端RFID读写软件读取RFID标签数量的统计结果如表3和表4所示。
结合上述本文研究算法的改进前后读写器漏读的情况进行统计分析,第二车间一周内电源线标签漏读数量如图9所示。
由图9分析可得,使用天牛群改进BP神经网络的动态帧时隙算法,标签平均漏读数量一周内由原先的128个减少至目前的3个,漏读率减少了97.65%。可以证明该算法有效地改善了标签碰撞的情况。在数据的准确读写方面有了很大的提升,读取准确率由未改进算法前的90%左右的水平到加入天牛群改进BP神经网络的动态帧时隙算法后99%左右的水平,提高了近10%,整个系统效率由此提高。
4" 结" 语
本文以密集环境下电源线RFID标签信息读写方法为研究对象,对RFID标签数量进行更准确的估计。通过Matlab进行了模拟仿真实验,实验证明随着标签数目的不断增加,算法的吞吐率稳定在0.35的水平,相对于之前的算法有了很大的提升,并且具有消耗时隙数少、消耗时间少、效率高的优点,有效解决了原有网络训练测试稳定性差、容易陷入局部最优的问题。在实际应用中,以一周读取标签数量为例,标签漏读率减少了97.65%,该算法有效地改善了标签碰撞的情况。在数据的准确读写方面也有了很大的提升,由未改进算法前的90%左右的水平到加入天牛群改进BP神经网络的动态帧时隙算法后99%左右的水平,读取准确率提高了近10%,整个系统效率由此得到提高。
注:本文通讯作者为洪涛。
参考文献
[1] 魏圣坤,张远辉.用于复杂机床车间环境下的多参数RFID传感器设计[J].机床与液压,2023,51(18):168⁃172.
[2] 燕怒,李达,韩冬桂,等.密集环境下无源超高频系统RFID标签识别性能研究[J].现代电子技术,2019,42(14):18⁃21.
[3] 周伟辉,蒋年德.智能包装中的RFID标签防碰撞算法研究[J].包装工程,2018(21):11⁃16.
[4] GOLSORKHTABARAMIRI M, TAHMASBI M, ANSARI S. A distributed mobile reader collision avoidance protocol for dense RFID networks [J]. Wireless personal communications, 2022, 6(1): 1⁃17.
[5] SU Z, WAN C, HE G, et al. NIAP: a neighbor information based multichannel RFID reader anti⁃collision protocol [C]// 2022 7th International Conferenceon Intelligent Information Technology. Foshan: IEEE, 2022: 70⁃76.
[6] 陈红琳.RFID系统防碰撞算法研究[J].计算机技术与发展,2016,26(10):108⁃112.
[7] 吴凡.UHFRFID标签防碰撞算法分析与研究[D].南京:南京邮电大学,2019.
[8] 何勇,郭政鑫,桂林卿,等.基于RSSI序列特性的RFID多标签相对定位方法[J].计算机科学,2023,50(11):296⁃305.
[9] 李文峰.物联网感知层关键技术研究[D].成都:电子科技大学,2017.
[10] 姚金玲,刘婕,闫雪锋.食品质量追溯中RFID多标签识别防碰撞算法[J].食品与机械,2021,37(6):97⁃101.
[11] 陈祥营,朱正伟.基于RFID系统的防碰撞算法研究与改进[J].电子测量技术,2021,44(11):84⁃89.
[12] 明东岳,王尚鹏,雷鸣,等.结合BP神经网络的动态帧时隙ALOHA改进算法[J].小型微型计算机系统,2021,42(9):1920⁃1923.
[13] 张军翠,王立成.基于天牛须搜索优化支持向量机液压泵故障诊断[J].噪声与振动控制,2022,42(3):105⁃109.
[14] HE F, ZHANG L. Mold breakout prediction in slab continuous casting based on combined method of GA⁃BP neural network and logic rules [J]. International journal of advanced manufacturing technology, 2018, 95(9/12): 4081⁃4089.
[15] 董轩江,李世宝,蔡丽萍,等.基于分组映射的防碰撞查询树算法[J].计算机工程,2020,46(8):184⁃189.
作者简介:王思源(1997—),男,浙江杭州人,硕士,研究方向为基于RFID的质量追溯方法。
洪" 涛(1970—),男,陕西安康人,正高级工程师,硕士生导师,研究方向为RFID质量追溯系统。
姜逸璇(1998—),女,浙江建德人,硕士,研究方向为RFID标签天线结构优化。
猜你喜欢
商情(2016年43期)2016-12-23 14:23:13
软件导刊(2016年11期)2016-12-22 22:01:20
软件导刊(2016年11期)2016-12-22 21:53:59
电子技术与软件工程(2016年20期)2016-12-21 10:42:59
科技视界(2016年26期)2016-12-17 17:57:49
考试周刊(2016年21期)2016-12-16 11:02:03
现代经济信息(2016年27期)2016-12-16 01:26:55
价值工程(2016年30期)2016-11-24 13:17:31
商情(2016年39期)2016-11-21 09:30:36
数字技术与应用(2016年9期)2016-11-09 22:37:01
