改进人工势场法无人机脱离局部极小值问题
2024-09-16 00:00:00秦克斌王帅淇郭晓宇陈一进鲁旭涛
现代电子技术 2024年10期
关键词:避障







摘" 要: 针对现有人工势场法在无人机路径规划应用过程中存在无人机陷入受力平衡,导致目标不可达,且当无人机陷入局部极小值时,该方法无法根据环境信息使无人机脱离力平衡点的问题,提出一种基于自膨胀系数改进的人工势场法。针对无人机陷入局部极小值的问题,建立自膨胀函数;当无人机陷入局部极小值时,针对无人机与目标点的距离为膨胀提供方向。通过改变自膨胀系数增大最近障碍物对无人机产生的斥力从而改变无人机受力形式,解决无人机陷入最优解的问题。仿真实验结果表明,改进后的人工势场法多次改变了无人机陷入最优点的情况,能够解决人工势场法无人机陷入局部极小值无法自主脱离的问题。
关键词: 人工势场法; 无人机路径规划; 膨胀系数; 引力势场; 斥力势场; 局部最优解; 避障
中图分类号: TN919⁃34; TP751" " " " " " " " " "文献标识码: A" " " " " " " " " " " 文章编号: 1004⁃373X(2024)10⁃0107⁃04
Method of UAV separation from local minima based on improved artificial
potential field method
Abstract: In allusion to the problem of unmanned aerial vehicle (UAV) getting stuck in force balance during the application of existing artificial potential field methods in UAV path planning, resulting in unreachable targets, and the inability of this method to detach UAVs from the force balance point based on environmental information when UAVs get stuck in local minima, an improved artificial potential field method based on self expansion coefficient is proposed. A self expansion function is established to address the issue of drones getting stuck in local minima. When the drone falls into a local minimum, the distance between the drone and the target point can provide the direction for expansion. By changing the self expansion coefficient to expand the repulsive force generated by the nearest obstacle on the drone, the force form of the drone can be changed, solving the problem of the drone falling into the optimal solution. The simulation experimental results show that the improved artificial potential field method has repeatedly changed the situation of unmanned aerial vehicles being trapped in the optimal position, and can solve the problem of UAVs being trapped in local minima and unable to autonomously detach by means of the artificial potential field method.
Keywords: artificial potential field method; UAV path planning; expansion coefficieny; gravitational potential field; repulsive potential field; local optimal solution; obstacle avoidance
0" 引" 言
无人驾驶飞机(Unmanned Aerial Vehicle, UAV)是一种通过自备程序控制装置实现自主导航并完成空中作业任务的工具。相比传统飞行器,无人机具有使用灵活、操作简单、价格低廉等优势,在农业、军事、工业等领域都得到了广泛的应用。为了实现UAV在复杂环境中能够准确地抵达目标地点,研究一种符合无人机使用的路径规划算法成为无人机技术的关键一环[1⁃3]。
由于无人机在执行任务过程中会出现不同数量与位置的障碍物,对无人机的安全构成威胁,造成无人机受损,导致作业任务无法继续进行,因此对无人机路径规划算法的速度和效率提出了更高的要求。文献[4]提出了一种目标区域偏置扩展的无人机移动算法,先利用目标区域偏置扩展方法快速规划路线,再限制采样空间大小和扩展节点数量,修正方法得到平滑路线。文献[5]采用三阶B样条曲线进行航迹预规划,利用地图梯度信息并设计碰撞、平滑与可行性约束方程,实现轨迹动态规划。文献[6]针对传统人工势场法的路径规划中存在局部极小值和目标不可达问题,将算法道路边界障碍化,对障碍物密集部分进行连锁处理,引入目标点与无人机距离因数,并将局部极小值点设置为虚拟障碍物,解决了无人机陷入局部最小值的问题。文献[7]在调整半径为R的虚拟势场的圆形检测模型基础上,提前检测障碍物斥力势场形成的“最小值陷阱”,结合LSTM改进强化学习模型,对障碍物进行了有效避障。文献[8]为了解决无人机因引力过大与障碍物相撞问题,提出了模糊远近界点概念,并结合模拟退火算法解决了局部极小值问题。文献[9]将引力函数进行分段,解决了传统人工势场法中引力过大的问题,并在斥力函数中加入动态排斥电势,解决了目标不可达的问题。
上述研究对于无人机路径规划过程中人工势场法可能出现极小值,使得无人机陷入最小值陷阱的问题,普遍采用了在最小值位置上建立虚拟障碍物产生斥力势场[10⁃12]等方法,并未考虑当新设置的虚拟障碍物产生的斥力势场产生出新的局部极小值点的情况,也无法应对大面积或者障碍物较多的复杂地图以及局部极小值较多等问题。本文针对上述问题,提出一种基于自膨胀系数改进人工势场法,从而进行路径规划的方法。首先根据人工势场法特性建立膨胀指标,根据地图障碍物特性确定膨胀系数大小;再参考目标点位置确定膨胀方向,使无人机不需要额外操作即可脱离局部最小值陷阱,解决了无人机无法依靠自身脱离局部极小值的问题。
1" 人工势场法建立
1.1" 引力势场搭建
人工势场法[13]通过对目标点建立引力势场来对目标进行吸引。引力势场主要与无人机和目标点之间的欧氏距离有关,距离越大,无人机所受势能越大;距离越小,无人机所受势能越小,其公式如下:
式中:[ς]为尺度因子;[ρ(q,qgoal)]表示物体当前状态与目标距离,为矢量。
无人机对受到目标点引力[Fatt(q)]表示为:
[Fatt(q)=-∇Uatt(q)=ςρ(q,qgoal)] (2)
1.2" 斥力势场搭建
决定障碍物斥力势场的主要因素为无人机与障碍物之间的距离,无人机未进入障碍物斥力势场影响范围时,其不受斥力势场影响;当无人机进入斥力势场范围后,其与障碍物之间距离越小,斥力越大,而距离越大,斥力越小。斥力势场函数为:
式中:k为斥力尺度因子;[ρ(q,qo)]为无人机与目标点之间的距离;[ρo]为每个障碍物影响半径。
斥力势场梯度公式如下:
1.3" 合力势场
无人机采用人工势场法进行移动时,同时受到障碍物斥力势场与目标点引力势场影响,因此其总的势场为:
无人机所处位置由无人机所受合力决定,公式为:
[-∇Ureq(q)=-∇Uatt(q)-∇Urep(q)]" (6)
2" 问题分析
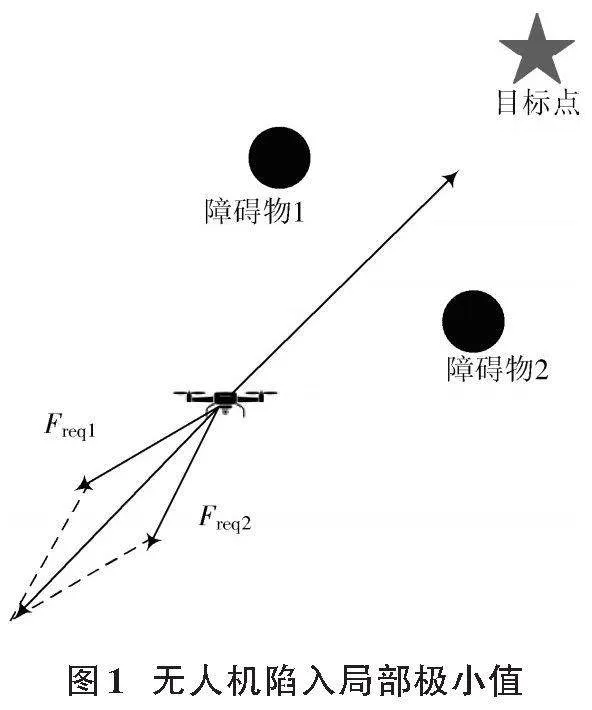
人工势场法应用方便,搭建势力场简单,但在使用的过程中仍然存在问题。如无人机在移动过程中,当两个障碍物势场产生的斥力与目标点产生的引力刚好达到平衡,此时无人机陷入力平衡状态,无法继续进行移动。同时人工势场法中存在极小值点的数量与位置均无法确定的问题,随着地图和障碍物数量不断增加,地图内存在的局部极小值点的数量也无法确定,若需要对每个局部极小值点建立虚拟障碍物,则效率过低。无人机陷入局部极小值示意图如图1所示。
3" 算法优化
3.1" 膨胀系数的引入
当无人机陷入局部最小值时,无人机处于受力平衡状态。在经典人工势场法中,无人机此时无法依靠自身脱离局部最小值点,若依靠人工干扰脱离局部最小值点,无人机有可能再次回到此局部最小值点;同时,受限于地图面积与多障碍物影响,地图内可能存在数量未知的局部极小值点,若均需要人工干预,则会严重影响无人机飞行效率。
因此,本文通过引入膨胀系数,使无人机进入局部极小值点后,依靠自身脱离局部极小值点;若无人机再次回到此局部极小值点,则膨胀系数将会变大,使无人机下次脱离局部极小值点的距离更大,公式如下:
式中:[ω]为膨胀系数;[σ]为膨胀方向;n为回到局部极小值点的次数;N为返回次数上限。
3.2" 膨胀方向选择
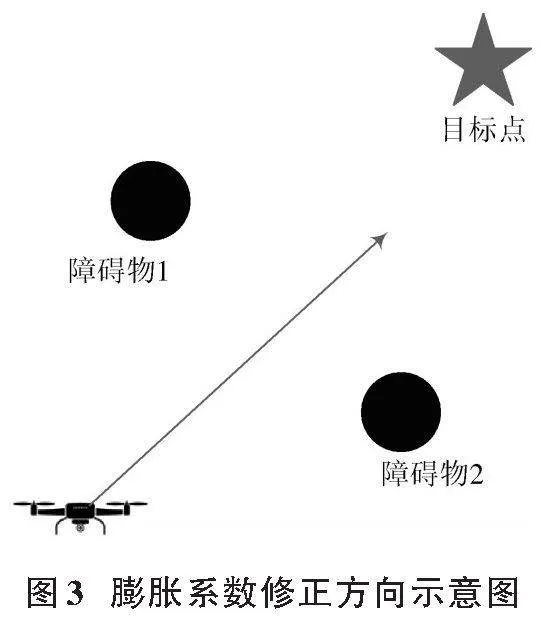
膨胀方向的选择对于无人机能否顺利脱离局部极小值点以及无人机无法碰撞障碍物发挥着重要作用。膨胀系数方向示意图如图2所示,膨胀系数修正方向示意图如图3所示。
无人机膨胀系数方向应与目标点方向一致,若膨胀方向不一致,无人机脱离局部极小值点后极易再次陷入局部极小值点。同时,无人机膨胀方向应考虑最近障碍物的欧氏距离,公式如式(9)、式(10)所示。若目标方向上存在障碍物,同时膨胀距离恰好大于此欧氏距离,则无人机将与障碍物发生碰撞。
式中:[(xgoal,ygoal)]为目标位置;[(xobj,yobj)]为距离最近的障碍物位置。
4" 算法仿真实验
4.1" 仿真条件
自膨胀系数优化算法流程如图4所示。
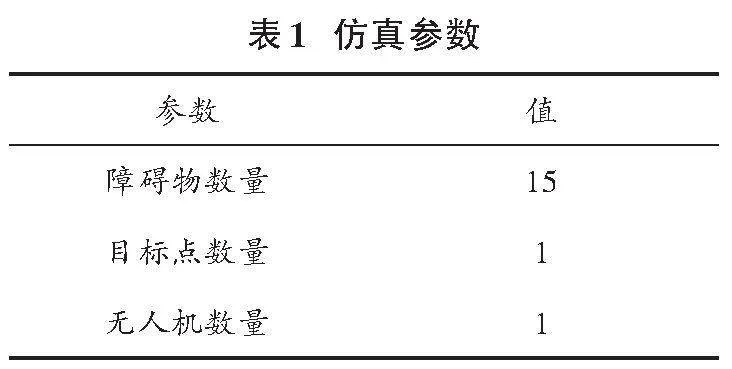
本文采用CPU:i5⁃8300,Matlab 2022a软件进行仿真实验,仿真参数设置如表1所示。
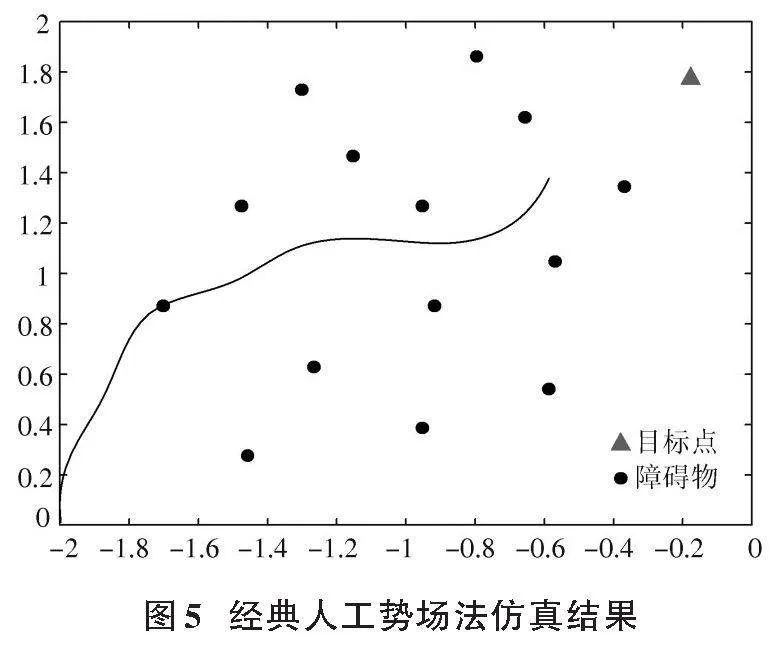
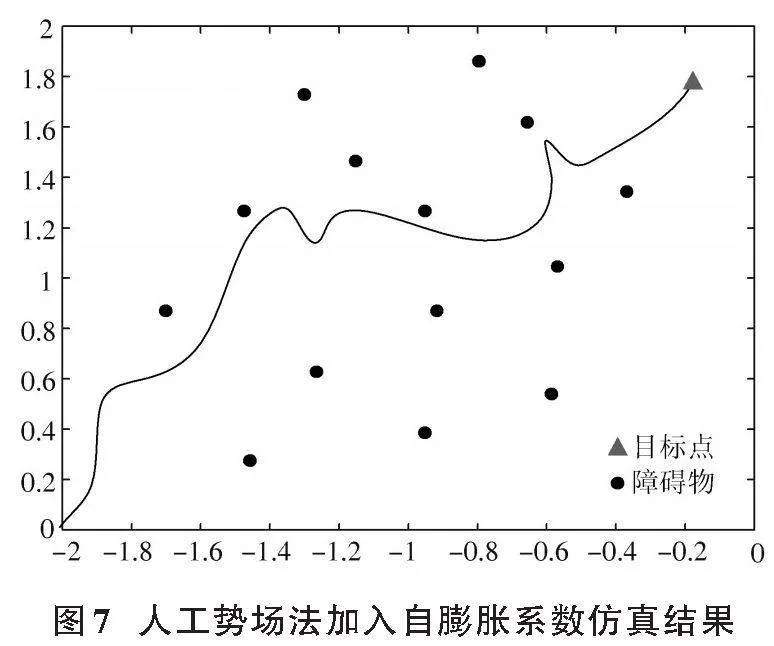
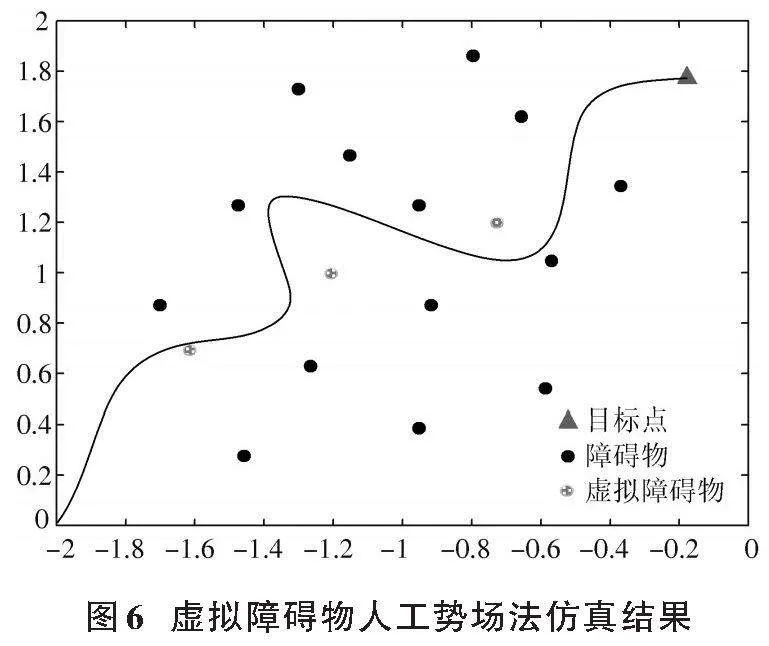
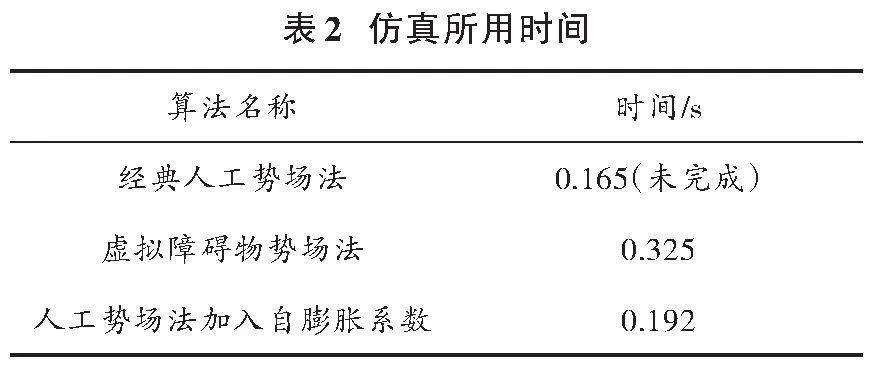
仿真对比试验分别采用经典人工势场法、虚拟障碍物人工势场法以及加入自膨胀系数的人工势场法,仿真结果如图5~图7所示。仿真所用时间如表2所示。
4.2" 总" 结
仿真实验结果表明:在相同地图中,多障碍物采用经典人工势场法,无人机无法依靠自身脱离局部最优解从而抵达目的地;在虚拟障碍物人工势场法中,当无人机陷入局部最小值,需要在最小值处建立虚拟障碍物,依靠虚拟斥力场脱离此处,但由于不可见最小值点过多,导致需要建立数量未知的虚拟障碍物;加入自膨胀系数的人工势场法中,无人机陷入局部最优解,依靠自身膨胀系数脱离局部最优解陷阱,从而顺利抵达目的地。
5" 结" 语
目前,人工势场的使用场景主要集中在有大障碍物的开阔地域方面,而本文研究的加入自膨胀系数的人工势场法在障碍物密度极大的小地图情景下,可能会存在自膨胀系数的增大导致无人机与障碍物发生碰撞的情况,因此需要进一步研究。
参考文献
[1] 海振洋,王健,牟思凯,等.无人驾驶路径规划算法综述[J].农业装备与车辆工程,2022,60(11):142⁃146.
[2] 郑志强,段方,宋国鹏,等.无人车路径规划算法研究综述[C]//2022年无人系统高峰论坛(USS2022)论文集.西安:[出版者不详],2022:122⁃126.
[3] 刘志飞,曹雷,赖俊,等.多智能体路径规划综述[J].计算机工程与应用,2022,58(20):43⁃62.
[4] 易驰,伍建辉.目标区域偏置扩展的RRT*路径规划算法[J].现代信息科技,2022,6(19):7⁃12.
[5] 罗银辉,李荣枝,潘正宵,等.多约束的无人机动态路径规划算法研究[J].无线电工程,2023,53(1):11⁃17.
[6] 牛秦玉,李美凡,赵勇.改进人工势场法的AGV路径规划算法研究[J].机床与液压,2022,50(17):19⁃24.
[7] 罗洁,王中训,潘康路,等.基于改进人工势场法的无人车路径规划算法[J].电子设计工程,2022,30(17):90⁃94.
[8] 李家林,张建强,李春来.基于优化人工势场法的无人艇局部路径规划[J].舰船科学技术,2022,44(16):69⁃73.
[9] 刘忠,伊戈,张建强.基于改进人工势场法的无人艇避障算法[J].海军工程大学学报,2021,33(5):28⁃32.
[10] 陈天德,黄炎焱,沈炜.基于虚拟障碍物法的无震荡航路规划[J].兵工学报,2019,40(3):651⁃658.
[11] 叶炜垚,王春香,杨明,等.基于虚拟障碍物的移动机器人路径规划方法[J].机器人,2011,33(3):273⁃278.
[12] 雷兆明,孙鹤旭,刘作军,等.非完整性约束下移动机器人带虚拟障碍物的路径规划[C]//第二十六届中国控制会议论文集.北京:北京航空航天大学出版社,2007:2744⁃2748.
[13] 王庆禄,吴冯国,郑成辰,等.基于优化人工势场法的无人机航迹规划[J].系统工程与电子技术,2023,45(5):1461⁃1468.
猜你喜欢
农业科技与装备(2016年11期)2017-04-22 20:15:55
价值工程(2017年10期)2017-04-18 15:18:31
现代电子技术(2017年5期)2017-04-01 23:27:12
中国科技博览(2017年2期)2017-03-30 10:39:27
科学与财富(2016年34期)2017-03-23 09:29:54
中国新技术新产品(2017年2期)2017-01-20 18:09:43
科技创新与应用(2016年34期)2016-12-23 10:14:38
电子技术与软件工程(2016年20期)2016-12-21 10:44:40
中小企业管理与科技·中旬刊(2016年9期)2016-10-29 00:35:08
电脑知识与技术(2016年17期)2016-07-23 20:24:38