
基于LADRC的四轮全向Mecanum轮机器人运动控制研究
2024-09-14 00:00:00蒋华扬吴涛李明烁孙家辉任建鑫
现代电子技术 2024年6期

摘 "要: 近年来,移动机器人在巡检作业、智能电器、无人驾驶等领域的作用日益显现。全向移动机器人由于结构的特殊性和运动控制的复杂性,采用经典控制方法如比例积分微分控制、线性二次型调节控制等很难实现稳定的控制。针对全向移动机器人易受到外界扰动及其建模不精确的问题,进行四轮全向Mecanum轮机器人的运动控制系统设计。使用扩张状态观测器进行机器人总扰动的实时估计,完成LADRC控制器的设计。实验结果表明,相较于传统控制方法,基于LADRC的控制器能够更好地抑制外部干扰,减小运动误差,并提高机器人的运动精度和鲁棒性。
关键词: 四轮全向Mecanum轮机器人; LADRC控制器; 运动学模型; 扩张状态观测器; 抗扰特性; 轨迹跟踪
中图分类号: TN876⁃34; TP242 " " " " " " " " " "文献标识码: A " " " " " " " " " " 文章编号: 1004⁃373X(2024)06⁃0165⁃06
Research on four⁃wheel omnidirectional Mecanum wheel robot motion
control based on LADRC
JIANG Huayang1, WU Tao1, 2, LI Mingshuo1, SUN Jiahui1, REN Jianxin1
(1. Faculty of Mechanical and Electrical Engineering, Kunming University of Science amp; Technology, Kunming 650500, China;
2. Computer Center, Kunming University of Science amp; Technology, Kunming 650500, China)
Abstract: In recent years, the role of mobile robots has become increasingly evident in fields such as inspection tasks, smart appliances, and autonomous driving. Due to the particularity of the omnidirectional mobile robot structure and the complexity of motion control, classic control methods such as proportional⁃integral⁃derivative control and linear quadratic regulation control are challenging to achieve stable control. In allusion to problem that omnidirectional mobile robot is susceptible to external disturbance and its modeling is not accurate, the motion control system of four⁃wheel omnidirectional Mecanum wheel robot is designed. A real⁃time estimation of the overall disturbance for the robot is accomplished by means of an extended state observer, and the design of the LADRC (linear active disturbance rejection control) controller is completed. The experimental results show that, in comparison with traditional control methods, the controller based on LADRC can better suppress external interference, reduce motion errors, and improve the motion accuracy and robustness of the robot.
Keywords: four⁃wheel omnidirectional Mecanum wheel robot; LADRC controller; motion model; expansion state observer; immunity characteristics; trajectory tracking
0 "引 "言
随着科学技术的不断进步和人们对自动化技术的需求增加,移动机器人作为一种具有广泛应用前景的智能机器人系统,受到了越来越多的关注和研究[1⁃2]。移动机器人的运动控制是其关键技术之一,直接影响到机器人在不同环境下的运动能力和任务执行效果。针对移动机器人运动控制领域的研究,许多方法和技术已经被提出和应用[3]。例如:线性控制(PID控制)、模糊控制、神经网络控制、最优控制(LQR和MPC)以及自适应控制,不同的运动控制方法在不同的场景和应用中具有各自的优劣势。本文主要针对移动机器人自身扰动和外界干扰对其运动控制的影响进行进一步研究,因此选择有效抑制外部干扰和未建模动态系统扰动的自适应控制方法。线性自抗扰控制(Linear Active Disturbance Rejection Control, LADRC)是一种对系统的干扰进行实时估计和补偿,从而消除或减小干扰对系统性能的影响的控制方法[4]。研究者们利用LADRC算法设计了移动机器人的路径跟踪控制系统。通过自适应调节控制参数,该系统能够实现对移动机器人在不同路面和环境下的轨迹跟踪控制[5⁃7]。另外,研究者们提出了基于LADRC的轮式机器人速度和位置控制方案,有效解决了轮式机器人在不同工作负载和路面条件下的控制问题[8]。
本文主要针对基于LADRC四轮全向移动机器人的运动控制策略展开相应研究。首先,建立机器人数学模型;其次,进行扩张状态观测器和LADRC控制器的设计;最后,通过对比实验来分析所提出的LADRC控制策略与其他控制方法的优劣势。
1 "机器人数学模型
1.1 "运动学建模
四轮全向Mecanum轮机器人的位置和姿态在二维平面运动具有各自的作用,运动学建模过程同时定义全局坐标系与机器人坐标系。运动学模型在理论分析层面阐述了机器人运动控制单元驱动4个Mecanum轮完成全方位移动的过程,为了简化建模和分析过程,在做出理想条件假设的情况下,分析机器人的运动学模型[9⁃11]。
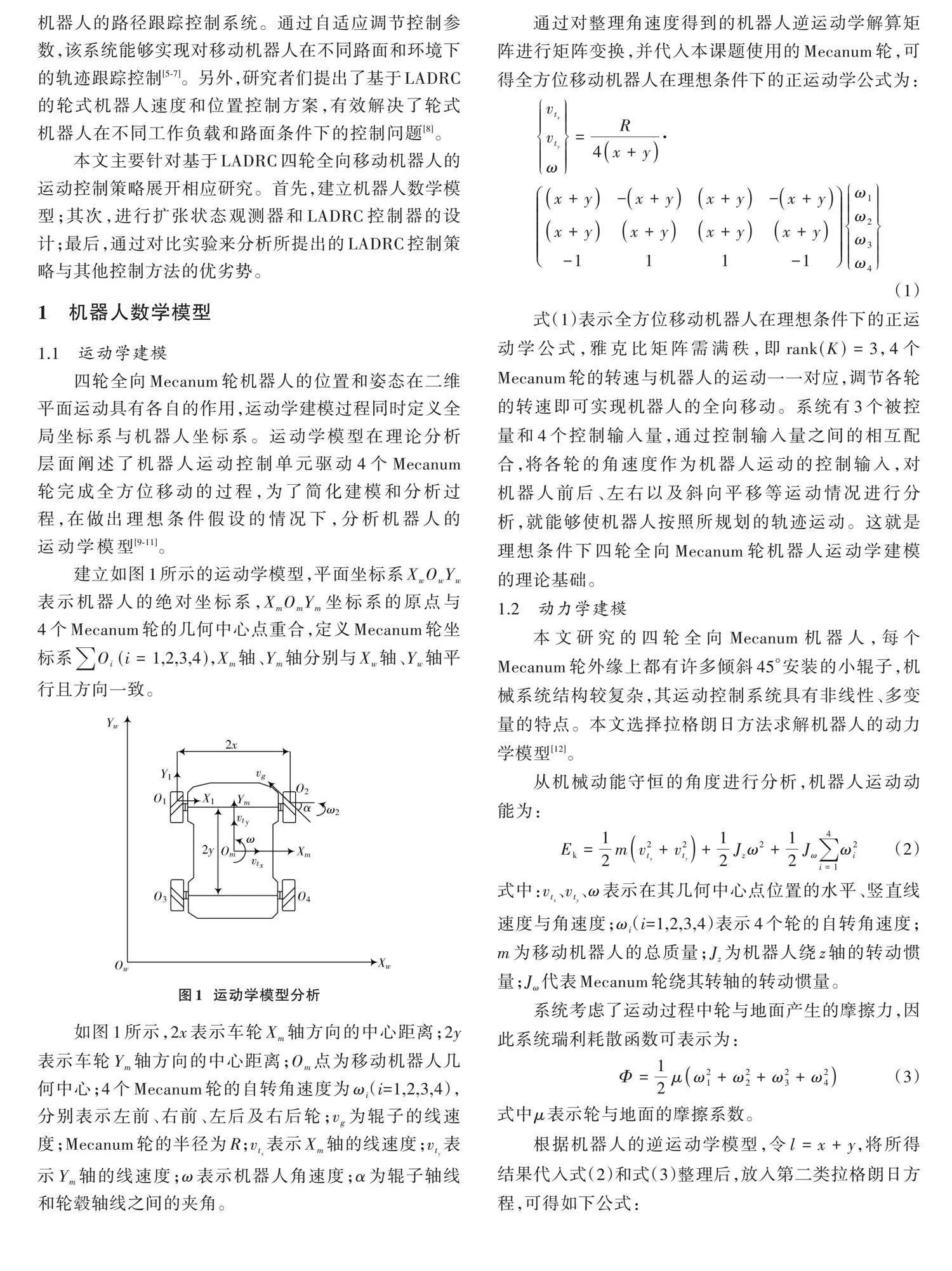
建立如图1所示的运动学模型,平面坐标系[XwOwYw]表示机器人的绝对坐标系,[XmOmYm]坐标系的原点与4个Mecanum轮的几何中心点重合,定义Mecanum轮坐标系[Oi(i=1,2,3,4)],[Xm]轴、[Ym]轴分别与[Xw]轴、[Yw]轴平行且方向一致。
如图1所示,[2x]表示车轮[Xm]轴方向的中心距离;[2y]表示车轮[Ym]轴方向的中心距离;[Om]点为移动机器人几何中心;4个Mecanum轮的自转角速度为[ωi](i=1,2,3,4),分别表示左前、右前、左后及右后轮;[vg]为辊子的线速度;Mecanum轮的半径为R;[vtx]表示[Xm]轴的线速度;[vty]表示[Ym]轴的线速度;[ω]表示机器人角速度;[α]为辊子轴线和轮毂轴线之间的夹角。
通过对整理角速度得到的机器人逆运动学解算矩阵进行矩阵变换,并代入本课题使用的Mecanum轮,可得全方位移动机器人在理想条件下的正运动学公式为:[vtxvtyω=R4x+y·x+y-x+yx+y-x+yx+yx+yx+yx+y-111-1ω1ω2ω3ω4] " " " " (1)
式(1)表示全方位移动机器人在理想条件下的正运动学公式,雅克比矩阵需满秩,即[rank(K) = 3],4个Mecanum轮的转速与机器人的运动一一对应,调节各轮的转速即可实现机器人的全向移动。系统有3个被控量和4个控制输入量,通过控制输入量之间的相互配合,将各轮的角速度作为机器人运动的控制输入,对机器人前后、左右以及斜向平移等运动情况进行分析,就能够使机器人按照所规划的轨迹运动。这就是理想条件下四轮全向Mecanum轮机器人运动学建模的理论基础。
1.2 "动力学建模
本文研究的四轮全向Mecanum机器人,每个Mecanum轮外缘上都有许多倾斜45°安装的小辊子,机械系统结构较复杂,其运动控制系统具有非线性、多变量的特点。本文选择拉格朗日方法求解机器人的动力学模型[12]。
从机械动能守恒的角度进行分析,机器人运动动能为:
[Ek=12mv2tx+v2ty+12Jzω2+12Jωi=14ω2i] "(2)
式中:[vtx]、[vty]、[ω]表示在其几何中心点位置的水平、竖直线速度与角速度;[ωi](i=1,2,3,4)表示4个轮的自转角速度;[m]为移动机器人的总质量;[Jz]为机器人绕[z]轴的转动惯量;[Jω]代表Mecanum轮绕其转轴的转动惯量。
系统考虑了运动过程中轮与地面产生的摩擦力,因此系统瑞利耗散函数可表示为:
[Φ=12μω21+ω22+ω23+ω24] " (3)
式中[μ]表示轮与地面的摩擦系数。
根据机器人的逆运动学模型,令[l = x+y],将所得结果代入式(2)和式(3)整理后,放入第二类拉格朗日方程,可得如下公式:
[Ax+Bx=FxAy+By=FyCθ+l2Bθ=τA=m+4JωR2,B=4μR2,C=Jz+4Jωl2R2] " (4)
式中:广义力[Fx]、[Fy]为[Xw]和[Yw]方向上的总驱动力;[τ]表示绕[z]轴旋转的总转矩。
在机器人坐标系下,沿[Xm]和[Ym]轴的驱动力[F′x]和[F′y]以及绕[Zm]轴的合力矩[τ]与电机驱动力矩[τi]的关系式如下:
[F′xF′yτ=12RPτ1τ2τ3τ4,P=1111-11-11-l-lllτ1τ2τ3τ4=2RPTPPT-1F′xF′yτ] (5)
系统的总驱动力通过[F′x]与[F′y]二力合成所得,通过坐标变换矩阵可将驱动力在全局坐标系下的[Xw]和[Yw]轴中进行重新分解,进而获得[Fx]与[Fy],因此转换关系式如下:
[FxFyτ=12RwmRTPτ1τ2τ3τ4] " (6)
式中[wmR]表示全局坐标系与机器人坐标系转换矩阵。
综合式(4)~式(6)可得式(7),即控制输入为各Mecanum轮电机驱动力矩,状态变量为四轮全向机器人位姿[q]的系统动力学模型。
[A000A000Cq+B000B000l2Cq=12RwmRTPτ1τ2τ3τ4] "(7)
2 "机器人LADRC控制器设计
2.1 "控制系统设计
四轮全向Mecanum轮机器人的建模过程存在一定误差,机器人系统内部的不确定因素难以消除,也容易受到外界环境的干扰。针对目前机器人的控制策略存在依赖被控对象的数学模型而导致抗干扰性能较差等问题,本文采用LADRC对机器人的运动控制问题进行研究。
由式(7)可知,系统由4个电机提供的驱动力矩作为输入,但是状态量[q]只有3个,因此系统存在控制耦合,需要进行变量代换实现控制解耦,将系统简化为[x]、[y]和[θ]三个独立的单输入单输出系统。根据式(5)~式(7),且由式(6)最终可得到新的动力学方程[13]:
[Mq+Cq =u] (8)
2.2 "扩张状态观测器的设计
扩张状态观测器是一种用于系统状态估计的技术,它可以提高控制器对系统状态的感知能力。本节选择线性扩张状态观测器LESO[14⁃15]对四轮全向Mecanum轮机器人的总扰动进行实时估计,将式(8)改写为:
[q=q2q2=q = M-1u-Cq+f] "(9)
式中:[f]为系统总扰动,不仅包含系统耗散力为代表的系统非保守力,同时也包括系统运动过程中的外部环境因素干扰以及建模过程中模型不精确导致的不确定性等内部扰动。
用[z1]、[z2]、[z3]分别对[q]、[q]、[f]进行估计,根据四轮全向Mecanum轮机器人的系统方程式(9),设计LESO如下:
[z1=z2+β1q1z2=z3+M-1u-Cq+β2q1z3=β3q1] "(10)
式中:[q1]作为[q]的估计误差,并且[q1=q-q],[q]表示机器人的位姿估计值;[β1]、[β2]、[β3]为设计的观测器增益,观测器增益的取值可通过极点配置法计算得到。LESO的特征方程如下:
[λ0(s)=s3+β1s2+β2s+β3=0] (11)
为了参数调试方便,将LADRC的调参问题与观测器带宽相联系,特征方程的极点都配置在[-ωo]处,[ωo]作为观测器带宽,这样式(11)可以改写为:
[λ0(s)=s3+β1s2+β2s+β3=s+ωo3=0] (12)
通过合理设计LESO以及正确配置观测器增益的值,LESO可以较为精准地估计系统方程的各状态变量和扩张的状态变量,能够实现[z1→q],[z2→q],[z3→f]。LESO对于不确定情况下四轮全向Mecanum轮机器人的运动控制具有关键作用。
2.3 "LADRC控制器的设计
对于四轮全向Mecanum轮机器人而言,其系统带宽受车体硬件等物理因素的限制,不能无限增大。对于实时改变的系统,LESO估计系统总扰动的效果并不理想,导致仅靠PID控制不能获得较好的控制性能,因此将设计的控制器分为扰动补偿部分和轨迹跟踪部分,一部分控制系统的误差,一部分控制系统的稳定。这样既能让移动平台快速稳定运行,又能使系统的误差较小。
控制器的扰动补偿部分[16]公式如下:
[u1=-Mz3] "(13)
式中[z3]包含了建模过程的不确定性、机器人运动过程中系统参数的改变以及外界环境因素对机器人产生的干扰。在控制器中对系统的总扰动[z3]进行补偿,进而实现对四轮全向Mecanum轮机器人的精准控制。
控制系统设计的要求是轨迹跟踪,为此轨迹跟踪部分设计如下:
[u2=Mqd+KPqd-z1+KDqd-z2+M-1Cq] "(14)
式中:[qd]表示机器人的期望位姿;[KP]和[KD]分别为比例和微分的放大系数。
[ωci=ωc1+aqi+b, "i=1,2,3] "(15)
式中:[ωc]表示控制器初始带宽;[qi]代表[q]的第[i]个分量。
将式(13)与式(14)联立,可得含有扰动补偿的LADRC公式为:
[u=u1+u2=Mqd+KPqd-z1+ " " " "KDqd-z2+M-1Cq-z3] " " (16)
由[u=Bτ]可知,[u]为系统的虚拟控制量,其中[τ=R2P1wmRu],令[B1=R2P1wmR],可得含有扰动补偿的非线性控制器为:
[τ=B1u=B1Mqd+KPqd-z1+ " " " "KDqd-z2+M-1Cq-z3] (17)
根据[ωci]公式可知:当速度[qi]远大于[a]时,各通道的控制器增益近似等于初始增益;当速度[qi]远小于[a]时,控制器增益比初始增益大,既能提高控制精度,又能避免执行器饱和。控制器最大增益通过式(15)中参数[a]和参数[b]确定,可以有效避免控制器因带宽过大造成的系统不稳定等问题。
在控制器中,[-Mz3]作为扰动补偿项,其中[z3]表示系统的总扰动,通过补偿扰动能够最大程度地降低不确定性对系统的影响,使得控制器拥有良好的主动抗扰性能。控制器中既包含已知数学模型的信息,也包含给定的轨迹信息,减轻了控制器的计算负担,减少了扰动估计的滞后,改善了控制器的控制性能。
3 "仿真结果与分析
3.1 "对比仿真实验参数设置
仿真的参考轨迹设置为具有不稳定性的圆形,在轨迹跟踪过程中机器人的运动方向会发生变化,这一过程相当于在轨迹中添加扰动,用这种方法来证明LADRC算法的抗扰特性。本文将圆形的直径设为[1 m],参考轨迹为:[x=cost],[y=sint],[θ=t],机器人的线速度取[0.072 m/s],角速度取4.5 rad/s。为验证LADRC的优势,仿真过程中与工业中常用的PID控制器进行对比。LESO的观测器带宽[ωo=2],线速度LADRC控制器的参数为:[Kp1=5 000A],[Kd1=100A];角速度LADRC控制器的参数为:[Kp2=5 000C],[Kd2=100C]。设置线速度PID控制参数为:[KP1=100A],[KD1=100A];角速度PID控制参数为[KP2=100C],[KD2=100C]。初始条件下,将四轮全向Mecanum轮机器人的初始值设置为:[x=0.5 m],[y=0.2 m],[θ=0];仿真时间设置为[10 s],采样频率为[500 Hz]。四轮全向Mecanum轮机器人模型参数设定如表1所示。
3.2 "对比仿真结果分析
为了进一步对LADRC算法性能进行量化,从而对控制器的有效性进行直观对比,采用累积绝对跟踪误差作为评价指标,定义如下:
[T(exy)=0Tex+eydtT(eθ)=0Teθdt] " (18)
式中:[ex]、[ey]、[eθ]为控制误差。
通过式(18)可知,累积绝对误差从全局上对LADRC的控制效果进行评定,评价指标表示移动机器人轨迹跟踪累积的跟踪误差的大小,累积绝对跟踪误差越小,表示机器人的轨迹跟踪性能越好,即控制器性能越好。
本次仿真中设置机器人进行低速运动,以尽可能减少系统扰动影响。两种控制算法对于圆形轨迹的跟踪性能如图2所示。
从图2机器人的轨迹跟踪曲线可知:一方面LADRC算法的轨迹跟踪性能在xy平面以及θ方向较好,能更快地到达稳态,机器人实际位姿轨迹与期望轨迹相差较小;另一方面,LADRC算法误差较小,而PID算法存在一定的超调。
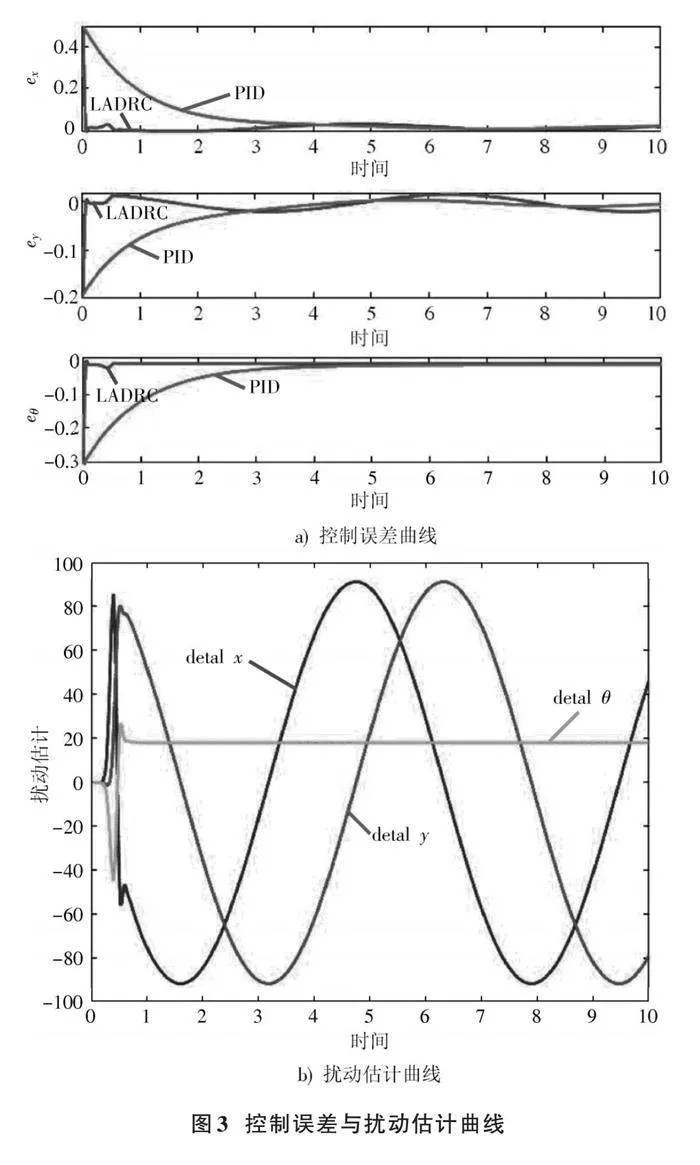
控制误差与扰动估计曲线如图3所示。由图3a)可知,轨迹跟踪过程中LADRC算法的控制性能明显好于PID算法,优势体现在如下两个方面:
1) 控制性能较好。起始阶段LADRC算法最大偏差小,系统到达稳态时间短,响应时间较快,控制误差在稳定状态下系统偏差较小,误差波动很小,整个控制过程比较稳定。
2) 抗扰性能较好。LADRC算法响应迅速,跟踪圆形轨迹的运动过程中没有出现很大的偏差和抖振现象;而PID算法的控制误差明显较大,存在较大超调和振荡,且轨迹跟踪速度较慢。
由图3b)可知,扰动作用过程中,观测器的响应速度较快,LESO观测器能够快速精确地对扰动进行实时估计,使得控制器能够对扰动进行实时补偿,因此具有优越的主动抗干扰性能。另一方面,尽管LADRC的扰动估计值波动较大,但控制误差比较小,说明算法的扰动补偿能力好,具备较强的扰动抑制作用。扰动估计值包括机器人未建模的部分,能够提升控制器的控制系统总体精度。
4 "结 "论
本文所设计的含有扰动补偿的四轮全向Mecanum轮机器人LADRC控制器不仅能够精确地获得控制系统总扰动的估计值,并对其扰动进行补偿,而且还能保证很高的控制精度,减小不确定性对机器人轨迹跟踪控制的影响。同时本文设计的控制器保持了传统LADRC的强鲁棒性,控制性能不随外界环境和扰动变化而变化,使得在实际轨迹跟踪控制过程中机器人可以不受环境等因素限制,最大超调量可忽略不计,控制量输出相对稳定,具有实际应用价值,有助于提升控制系统的稳定性和可靠性。本文研究的成果对于移动机器人技术的发展和应用具有重要意义。通过引入LADRC技术,成功提升了移动机器人的运动控制性能,使其更适应复杂和不确定的工作环境;同时,为移动机器人运动控制领域的进一步研究和应用提供了有益的参考和借鉴。
注:本文通讯作者为吴涛。
参考文献
[1] 曹风魁,庄严,闫飞,等.移动机器人长期自主环境适应研究进展和展望[J].自动化学报,2020,46(2):205⁃221.
[2] 谢嘉,桑成松,王世明,等.智能跟随移动机器人的研究与应用前景综述[J].制造业自动化,2020,42(10):49⁃55.
[3] 张守武,王恒,陈鹏,等.神经网络在无人驾驶车辆运动控制中的应用综述[J].工程科学学报,2022,44(2):235⁃243.
[4] SUN X, XIONG Y, YAO M, et al. A unified control method combined with improved TSF and LADRC for SRMs using modified grey wolf optimization algorithm [J]. ISA transactions, 2022, 131: 662⁃671.
[5] 翁发禄,郭毅,李胜飞.基于IBS和LADRC的四旋翼飞行器轨迹跟踪控制[J].电光与控制,2019,26(6):65⁃69.
[6] 田运阳,宋保业,吴尤,等.基于改进LADRC的全向移动机器人轨迹跟踪控制[J].控制工程:1⁃8[2023⁃05⁃30].https://doi.org/10.14107/j.cnki.kzgc.20220611.
[7] 王会明,张扬,王雪闯.移动机器人的线性自抗扰控制设计与实验验证[J].控制理论与应用,2022,39(7):1289⁃1296.
[8] 王鑫,刘怡明,王明明,等.基于改进模糊PID的轮式机器人速度控制器设计[J].河北科技大学学报,2020,41(1):50⁃57.
[9] PEZZATO C, FERRARI R, CORBATO C H. A novel adaptive controller for robot manipulators based on active inference [J]. IEEE robotics and automation letters, 2020, 5(2): 2973⁃2980.
[10] LI Y, GE S, DAI S, et al. Kinematic modeling of a combined system of multiple mecanum⁃wheeled robots with velocity compensation [J]. Sensors, 2019, 20(1): 75.
[11] 顾万里,王萍,胡云峰,等.具有H_∞性能的轮式移动机器人非线性控制器设计[J].吉林大学学报(工学版),2018,48(6):1811⁃1819.
[12] 何妍颖,李晔卓,武建昫,等.多模式两轮移动机器人的设计与运动分析[J].机械工程学报,2019,55(23):83⁃92.
[13] AJEIL F H, IBRAHEEM I K, AZAR A T, et al. Autonomous navigation and obstacle avoidance of an omnidirectional mobile robot using swarm optimization and sensors deployment [J]. International journal of advanced robotic systems, 2020, 17(3): 1729881420929498.
[14] 赵珈靓.基于自抗扰控制的全方位移动机器人轨迹跟踪研究[D].天津:天津大学,2018.
[15] WANG Hongdu, LI Xiaogang, LIU Xin, et al. Fuzzy sliding mode active disturbance rejection control of an autonomous underwater vehicle⁃manipulator system [J]. Journal of Ocean University of China, 2020, 19(5): 1081⁃1093.
[16] 马书根,赵珈靓,任超.基于无源性的全方位移动机器人自抗扰控制[J].控制与决策,2018,33(6):1081⁃1086.
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
高技术通讯(2021年7期)2021-08-30 08:36:52
现代信息科技(2021年21期)2021-05-07 02:54:12
家庭影院技术(2020年8期)2020-09-11 06:45:22
福建质量管理(2019年18期)2019-10-14 03:56:20
制造技术与机床(2017年3期)2017-06-23 08:11:21
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
电测与仪表(2014年11期)2014-04-04 09:21:36
