改进分类回归树模型的青冈枝叶点云分类研究
2024-09-12 00:00:00潘政尚马开森龙依赖珍贵孙华
南京林业大学学报(自然科学版) 2024年4期

摘要:【目的】传统的树木枝叶点云分类模型结构与特征过于复杂,存在稳定性差、精度低、模型过拟合及计算成本高等问题。研究以阔叶树青冈(Quercus glauca)地面激光点云数据为基础,提出一种改进的分类回归树(classification and regression tree, CART)枝叶点云分类模型。【方法】首先根据点的邻域特征构造特征描述子,确定邻域搜索参数的最佳取值。通过逐步引入变量和调整决策树模型结构实现对分类回归树模型的改进。将改进后模型的分类结果与Logistics回归和K近邻模型进行对比。【结果】特征描述子作为变量引入后,模型测试数据分类准确率有所提升,比Logistics回归和K近邻模型分别高出13.1%和13.6%;改进后的分类回归树模型准确率有较大提升,稳定性好且模型大小显著降低,模型大小较改进前减少了99.9%,数据训练时间仅为调整前的51.3%;改进后的方法在树干和树叶上的综合评价指标均在0.9左右,差距小于0.001,无过拟合现象。【结论】改进的CART模型具有较高的精度,在小样本上也能取得较好的分类效果,稳定性好。研究结果可为地面激光雷达枝叶点云精准快速分类提供参考。
关键词:地面激光雷达;点云分类;点云特征;分类回归树
中图分类号:S758; TP391"""" 文献标志码:A开放科学(资源服务)标识码(OSID):
文章编号:1000-2006(2024)04-0123-09
An improved CART model for leaf and wood classification from LiDAR pointclouds of Quercus glauca individual trees
PAN Zhengshang1, MA Kaisen1, LONG Yi1, LAI Zhengui2, SUN Hua1
(1.Research Center of Forestry Remote Sensing amp; Information Engineering, Central South University of Forestry and Technology, Key Laboratory of Forestry Remote Sensing Based Big Data amp; Ecological Security for Hunan Province, Key Laboratory of National Forestry and Grassland Administration on Forest Resources Management and Monitoring in Southern China, Changsha 410004, China;2.Lutou Experimental Forest Farm, Central South University of Forestry and Technology, Yueyang" 414000, China)
Abstract: 【Objective】Due to the complex structure and features, traditional classification models for tree branches and leaf point clouds typically face several problems, including poor stability, low accuracy, model overfitting, and high computational costs. In this study, we propose an improved CART (classification and regression tree) model for leaf and branch classification based on Quercus glauca individual tree point cloud data from terrestrial laser LiDAR. 【Method】First, the feature descriptor was constructed according to the neighborhood points, and the optimal value of the neighborhood search parameter was then determined. The CART model was improved by gradually introducing variables and adjusting the structure of the decision tree. The classification results of the improved CART model were compared with those of the Logistics regression and K-nearest neighbor (KNN) models. 【Result】 The accuracy of the improved CART model using the test data increased after introducing the feature descriptors as variables, exceeding that of the Logistics regression and KNN model by 13.1% and 13.6%, respectively. Moreover, the improved CART model exhibited higher accuracy, better stability, and marked reduced model size following the improvement. In particular, the model size was reduced by 99.9% compared with before the improvement, while the data training time was only 51.3% of that before the adjustment. The comprehensive evaluation index of the improved CART model was approximately 0.9 on both trunk and leaf data, with the difference between accuracy on train data and test data lower than 0.001, indicating no overfitting. 【Conclusion】The improved CART model has a high accuracy and stability, and achieves good classification results on small samples. This study provides a methodological reference for the accurate and rapid classification of trunk and leaf point clouds from terrestrial laser LiDAR.
Keywords:terrestrial laser LiDAR; point cloud classification; point cloud features; classification and regression tree
森林中树木的树干结构包含了许多与树木生长生态过程相关的信息,如胸径、树高、枝干倾角、枝下高等参数。传统森林调查聚焦于树木的主干信息,获取数据不连续、效率低[1]。地面激光雷达是一种主动遥感技术,能够以非接触方式快速获取高密度的树木三维点云信息[2],在短时序小尺度地物观测上具有优势。
树木结构信息主要来源于树木点云的树干部分,树叶点云会对树干信息的定量分析带来影响,因此需要进行枝叶点云分离。枝叶分离的方法按照原理可以分为基于回波特征与基于几何特征两大类。基于回波特征的方法主要利用激光点云的回波强度实现分类[3],这种方法主要利用树干与树叶表面微观物理特性带来的反射率差异实现枝叶分离,通过开发辐射校正模型[4]进行分类。但受森林复杂大气环境与激光雷达传感器性能差异的影响,基于回波特征的方法稳定性差,难以大规模应用[5]。而基于几何特征的方法一般通过提取点或局部点构成的集合特征进行分类,利用分类模型实现枝叶点云的分离[6-7]。在模型方面,非监督模型主要包括多尺度超体素分割算法[8]、最短路径算法[9]等,这类模型需要针对不同类型的数据进行调参,且对数据中的噪声较为敏感,精度较低,稳定性差[10]。监督模型主要包括常规机器学习模型[11]和深度学习模型[12-14],这类方法不受森林类型和数据源的限制[15-17],但需要人工输入大量的训练数据[18],且模型复杂度的提升会导致过拟合现象[19-20]。因此,本研究对基于几何特征的监督分类模型的技术流程进行优化,提出一种改进的分类回归树(classification and regression trees,CART)模型[21],可有效解决目前地面激光雷达树木点云分类存在的稳定性差、精度低、模型过拟合等问题。
为了实现精确快速稳定的点云枝叶分类,本研究以次生林环境下的阔叶树青冈(Quercus glauca)地面激光点云为研究对象,在对数据进行滤波等预处理的基础上,运用K维树(K-dimensional tree,KdTree)索引加速点云邻域搜索[22],以主成分分析法计算每个点在其邻域内的特征向量和特征值,并计算对应的特征描述子。通过引入特征描述子提高分类精度,调整模型结构消除过拟合现象并对比逻辑斯蒂回归(Logistics regression,LR)、K近邻(K-nearest neighbor,KNN)和原始CART模型在训练和测试数据上的精度,分析模型的改进效果。改进CART模型能够实现高精度的枝叶点云分类,为进一步定量分析森林树木结构信息提供支持。
1 材料与方法
1.1 研究区概况
研究区为湖南省长沙市宁乡市西部黄材镇青羊湖国有林场(112°2′E,28°9′N)。林场年平均气温16.2 ℃,最高气温40 ℃,平均年降水量1 438.8 mm,相对湿度85%,无霜期273 d,属中亚热带向北亚热带过渡的大陆季风性湿润气候区。林场土地总面积为1 129.1 hm2,森林覆盖率为98.7%。主要树种包括马尾松(Pinus massoniana)、南酸枣(Choerospondias axillaris)、青冈(Quercus glauca)等。林场所在区域的植被受人为活动影响较大,多年的砍伐导致该区域的原生植被大部分被破坏,青冈栎主要生长在采伐迹地自然化经营形成的次生林区域。
1.2 研究数据获取
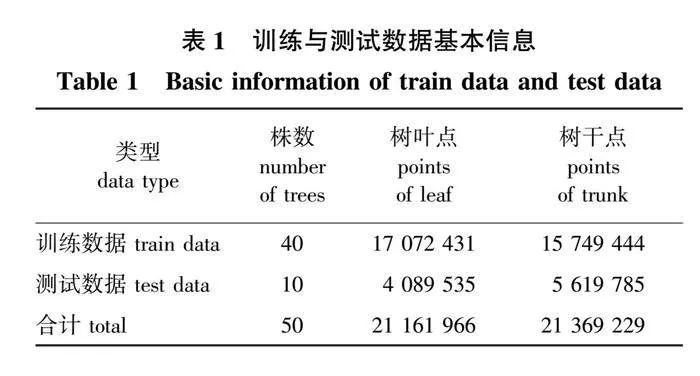
对阔叶树青冈的地面激光点云数据采集时间为2021年9月,使用FARO FOCUS 3D X330地面三维激光扫描仪进行数据采集。为保证获取较为完整的树木点云,每棵树架设3个扫描站,单站扫描数据深度图片分辨率为10 240×4 267像素,经过解算与滤波转化为包含约4 253万点的点云数据。依据树龄、胸径以及郁闭度等因子选择有代表性的样木,一共扫描了50株样木。经过数据预处理,最终得到50个样本数据,按照数据标签比例抽样分离训练数据与测试数据,试验数据的基本信息如表1所示。
完成扫描数据采集后,利用专用围尺和测高器分别量测样木的胸径与树高。在29株样木中,胸径的最小和最大值分别为7.12和33.05 cm,平均值18.75 cm,标准差5.8 cm;树高的最小和最大值分别为7.09和16.19 m,平均值11.63 m,标准差2.26 m。
1.3 点云数据预处理与样本选取
点云数据预处理包括:①点云去噪,利用基于邻域标准差去噪算法删除数据中的离群点[23],搜索参数设置为10,标准差倍数设置为5。②点云重采样,使用基于最小点间距的重采样算法消除由于扫描距离带来的点云密度不均问题[24-25],距离阈值设置为1 mm。③样本数据标记,对点云数据进行人工解译,以手动交互方式分离出完整的树干点云数据,使用KdTree加速K近邻搜索算法构建三维掩膜,利用掩膜提取点云数据,实现枝叶点云数据集的标记。
1.4 点云特征描述子计算
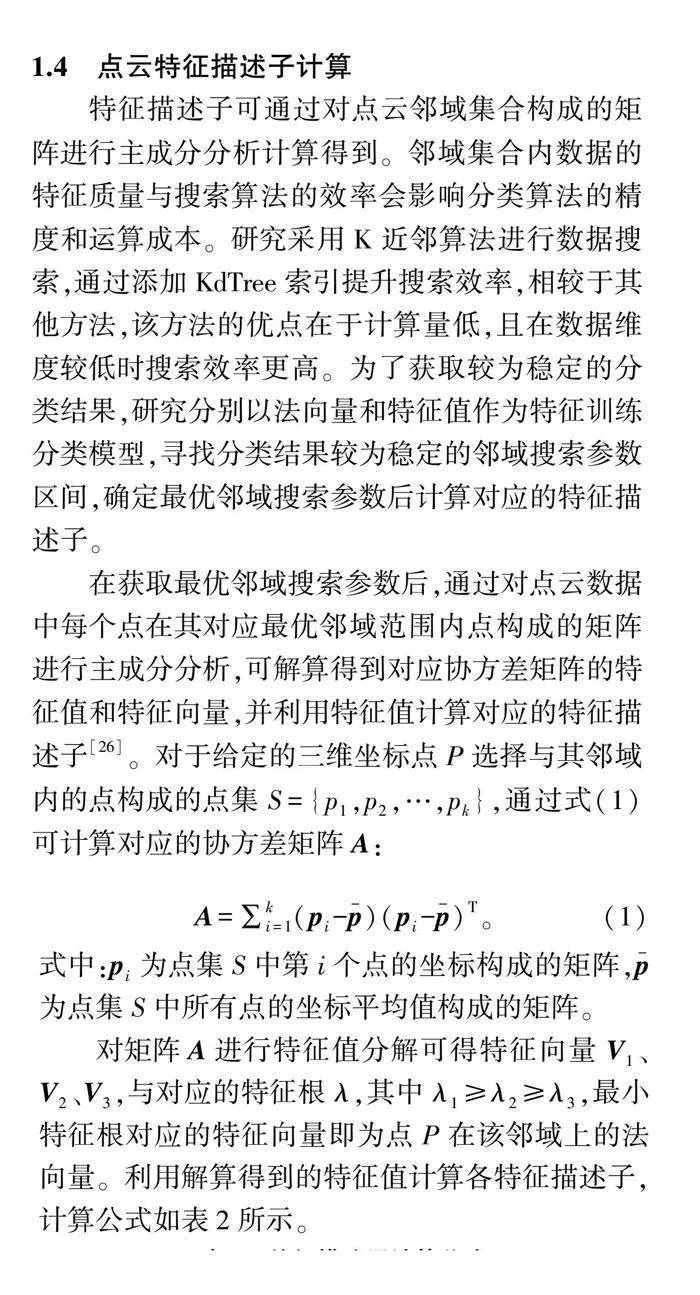
特征描述子可通过对点云邻域集合构成的矩阵进行主成分分析计算得到。邻域集合内数据的特征质量与搜索算法的效率会影响分类算法的精度和运算成本。研究采用K近邻算法进行数据搜索,通过添加KdTree索引提升搜索效率,相较于其他方法,该方法的优点在于计算量低,且在数据维度较低时搜索效率更高。为了获取较为稳定的分类结果,研究分别以法向量和特征值作为特征训练分类模型,寻找分类结果较为稳定的邻域搜索参数区间,确定最优邻域搜索参数后计算对应的特征描述子。
在获取最优邻域搜索参数后,通过对点云数据中每个点在其对应最优邻域范围内点构成的矩阵进行主成分分析,可解算得到对应协方差矩阵的特征值和特征向量,并利用特征值计算对应的特征描述子[26]。对于给定的三维坐标点P选择与其邻域内的点构成的点集S={p1,p2,…,pk},通过式(1)可计算对应的协方差矩阵A:
A=∑ki=1(pi-p-)(pi-p-)T。(1)
式中:pi为点集S中第i个点的坐标构成的矩阵,p-为点集S中所有点的坐标平均值构成的矩阵。
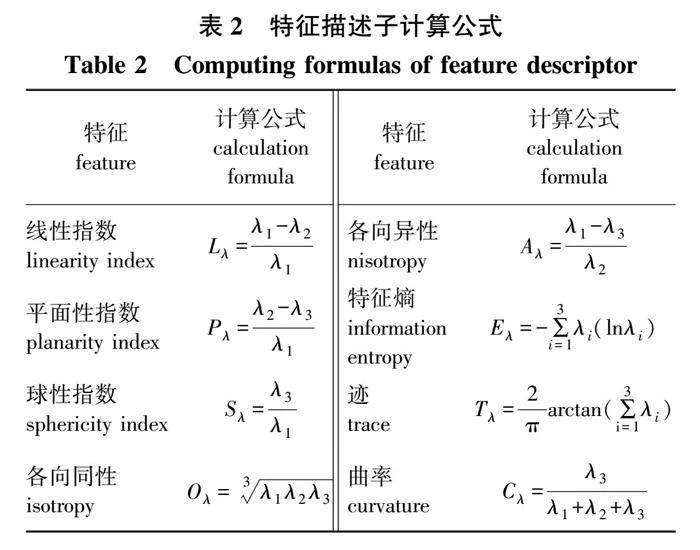
对矩阵A进行特征值分解可得特征向量V1、V2、V3,与对应的特征根λ,其中λ1≥λ2≥λ3,最小特征根对应的特征向量即为点P在该邻域上的法向量。利用解算得到的特征值计算各特征描述子,计算公式如表2所示。
1.5 改进分类回归树模型
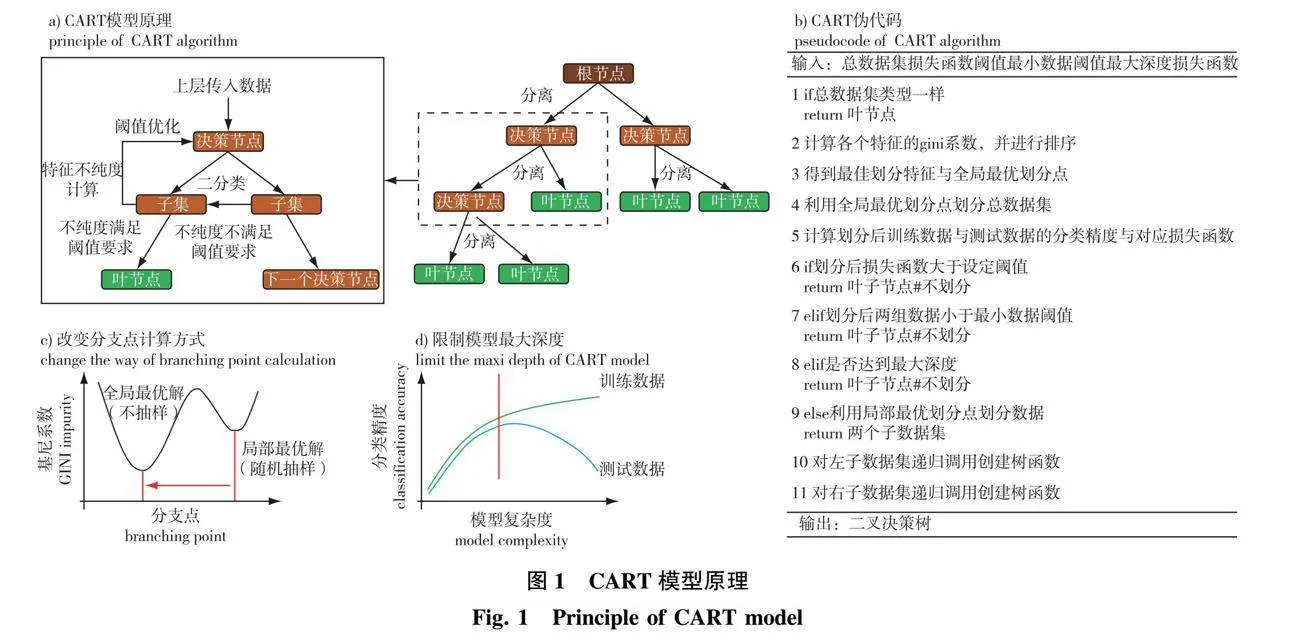
CART模型是一种基于条件概率的监督学习模型,通过GINI指数对训练数据特征的不纯度进行排序,优先选择不纯度最低的变量进行分割,一个决策节点选择一个变量,循环二分最终形成二叉决策树[27]。模型的主要步骤包括树生成和树剪枝两部分,研究使用Python3社区提供的sklearn机器学习库DecisionTreeClassifier接口实现分类回归树模型的构建。
CART模型在生成决策树的过程中采用贪心策略,只考虑每个节点生成局部最优解,这导致输入变量维度较低时精度不高,引入外部变量可以改善这一问题,但模型复杂度的增加会导致过拟合,因此需要对决策树结构进行调整,即决策树修剪。因此本研究以逐步回归的思路进行变量引入,将特征描述子作为变量依次引入,计算变量引入前后分类模型在测试数据上的准确率增益,选择准确率增益最高的变量,以尽可能少的外部变量实现最大的精度提升。为了解决模型消除复杂度带来的数据过拟合问题,研究结合预修剪与后修剪的思想,采用调整决策节点计算方式与限制模型最大深度的方式对决策树进行调整。在生成决策树时不对数据进行采样,以全局最优解替代局部最优解计算分支点,使每个节点的精度贡献最大化;同时将分类模型在不同数据上分类准确率之差作为损失函数对决策树进行修剪,以损失函数较小时对应的最大决策树深度作为调整改进CART模型的最大深度(图1)。为了验证CART模型及其改进策略带来的准确率提升,本研究选择与LR和KNN模型进行对比。
1.6 精度评价指标
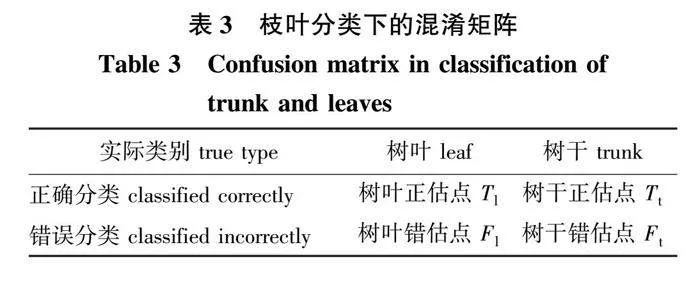
研究使用混淆矩阵与其衍生指标对分类模型精度进行定量评价,混淆矩阵中各个数据类型的意义如表3所示。
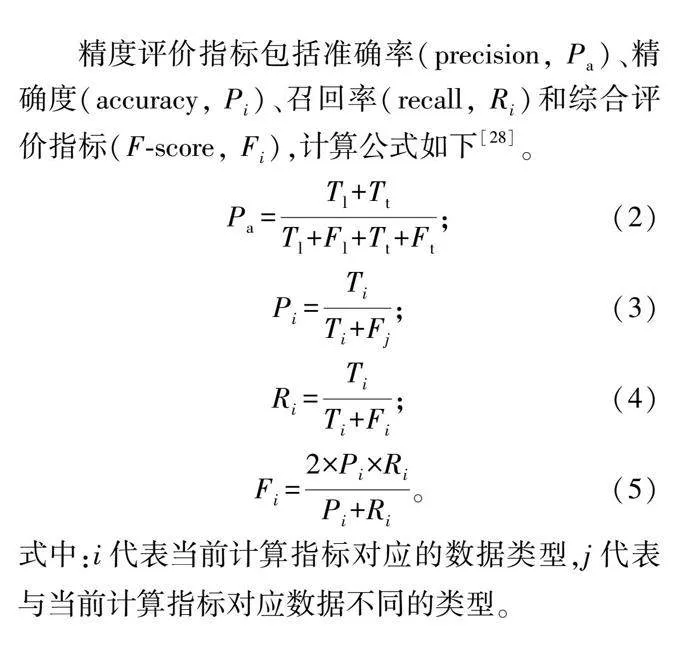
精度评价指标包括准确率(precision, Pa)、精确度(accuracy, Pi)、召回率(recall, Ri)和综合评价指标(F-score, Fi),计算公式如下[28]。
Pa=Tl+TtTl+Fl+Tt+Ft;(2)
Pi=TiTi+Fj;(3)
Ri=TiTi+Fi;(4)
Fi=2×Pi×RiPi+Ri。(5)
式中:i代表当前计算指标对应的数据类型,j代表与当前计算指标对应数据不同的类型。
2 结果与分析
2.1 邻域搜索参数的选择
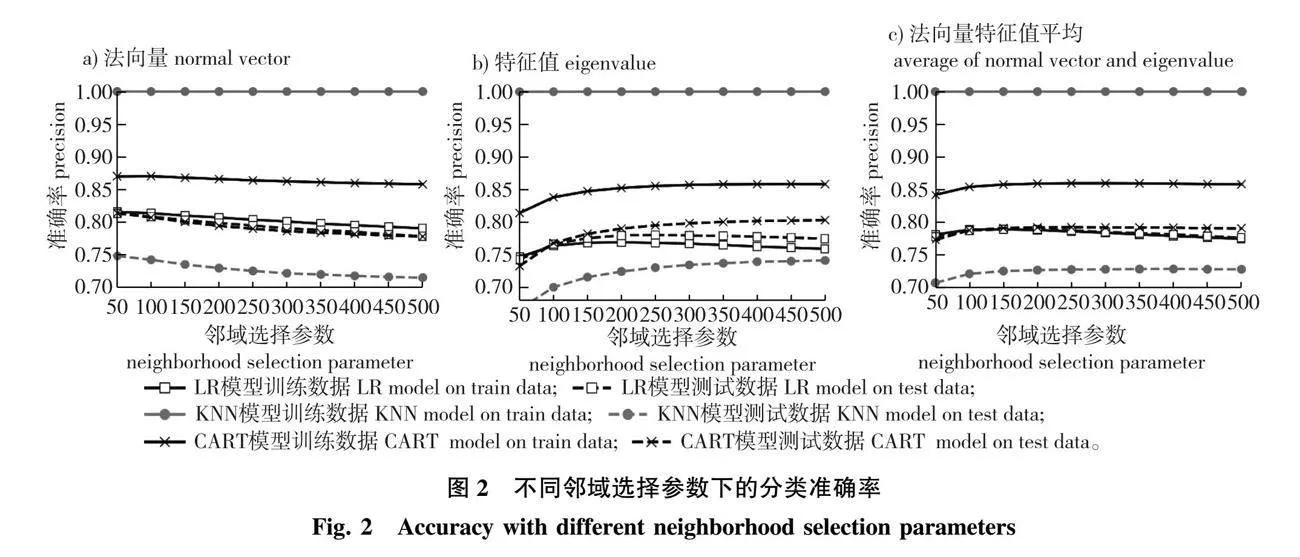
研究以50个点为步长,从50到500共取10组,计算对应邻域搜索参数下的法向量与特征值。分别使用法向量和特征值作为特征变量训练LR、KNN和CART分类模型,计算不同邻域搜索参数下各模型在训练与测试数据上的准确率,通过寻找分类结果较为稳定的邻域搜索参数区间确定最优邻域搜索参数。随着邻域选择参数增加,两组特征训练模型的准确率均有收敛的趋势(图2)。将法向量作为特征训练时,3种模型在测试数据上的分类准确率均呈下降趋势,并在邻域搜索参数达到300后逐渐收敛。将特征值作为特征训练时,3种模型在测试数据上的分类准确率均呈上升趋势,其中CART模型邻域搜索参数达到300后逐渐收敛。这一规律在平均准确率上也适用。为了获得尽可能稳定的分类结果,选择最优邻域搜索参数时应保证两组特征均已收敛,考虑到邻域选择参数与搜索需要消耗的系统资源呈正相关,故研究采用300作为最优邻域选择参数进行特征计算与模型训练。
2.2 CART模型优化
2.2.1 逐步引入特征变量
使用法向量和特征值训练的原始CART模型计算所得的平均测试数据准确率较低。在现有特征基础上,研究逐步引入表2中的8个特征描述子提升分类准确率。通过计算每个描述子带来的精度增益,保留精度增益为正的特征变量。第1轮变量引入时,除迹外的其他7个变量的准确率增益均为正,其中平面性指数增益最大,增益量为0.081;第2轮变量引入时,曲率增益最大,增益量为0.021,与其他增益为正的变量差异不大;第3轮变量引入时,除线性指数外,其他变量均无准确率增益,线性指数的增益小于0.1%,可忽略不计;第4轮变量引入时,所有变量均无准确率增益。在引入平面性指数、曲率后模型精度不再提升,故将法向量与上述特征描述子集合作为改进CART模型的特征变量。
2.2.2 调整决策树结构
适当引入变量能够提升模型精度,但变量增加会提升模型的复杂度,造成模型过拟合。研究结合预修剪与后修剪思想对决策树结构进行改进,在计算分支点时以全局最优解替代局部最优解,同时限制决策树最大深度。通过计算不同最大深度下测试与训练数据的分类精度对模型优化效果进行评价,以全局最优解作为分支点后,训练数据精度随决策树最大深度变化较改进前更稳定,整体精度水平更高(图3)。当最大深度取12时,改进CART模型测试数据准确率达到最大,且训练与测试数据准确率差距较小。生成决策树时使用全局最优解计算分支点会消耗更多计算资源,但限制决策树最大深度能够极大减少训练时间,通过提高浅层节点对模型准确率的贡献减少训练消耗的总资源。研究选择最大深度为12,计算全局最优分支点的模型作为调整改进CART模型。
2.2.3 模型轻量化
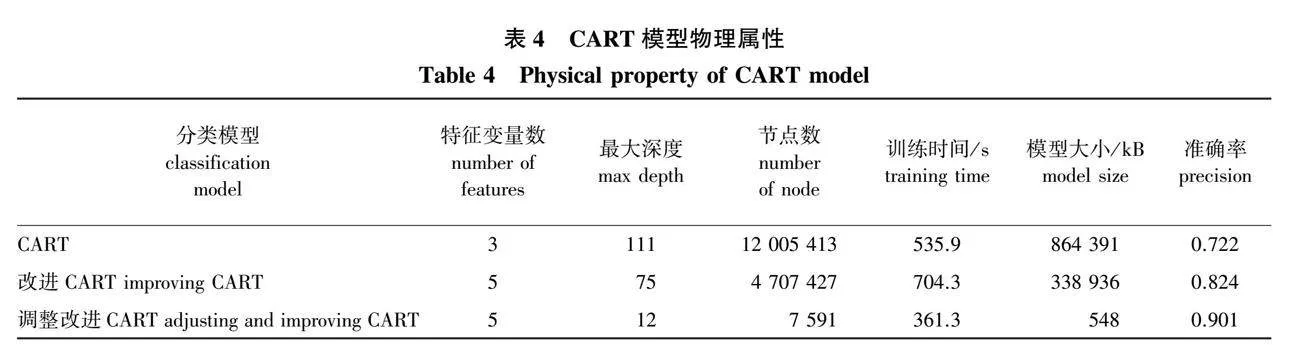
研究使用sklearn机器学习库的DecisionTreeClassifier接口进行模型训练,在八核心AMD Ryzen 7 4800H 2.9GHz处理器、16 GB内存的PC机上部署Python3环境下,使用Python3集成joblib模块将改进CART模型导出为pkl文件,计算改进与调整前后CART模型决策树所含的节点数、模型训练时间与模型大小。调整后的改进CART模型性能有较大提升,测试数据准确率为0.901,较调整前上升了9.3%,决策树中包含节点7 591个,为调整前的0.2%,训练时间为361.3 s,较调整前减少了48.7%(表4)。模型本身所占用的硬盘空间大小与训练所需时间决定其推广能力,模型决策树结构会影响模型运行计算量。研究在不降低分类精度的前提下,通过调整模型结构,降低了CART分类模型的时间成本和模型大小,调整改进后模型大小较改进前减少了99.9%,实现模型轻量化,提高了模型的可移植性,有利于模型的推广应用。
2.2.4 模型稳定性分析
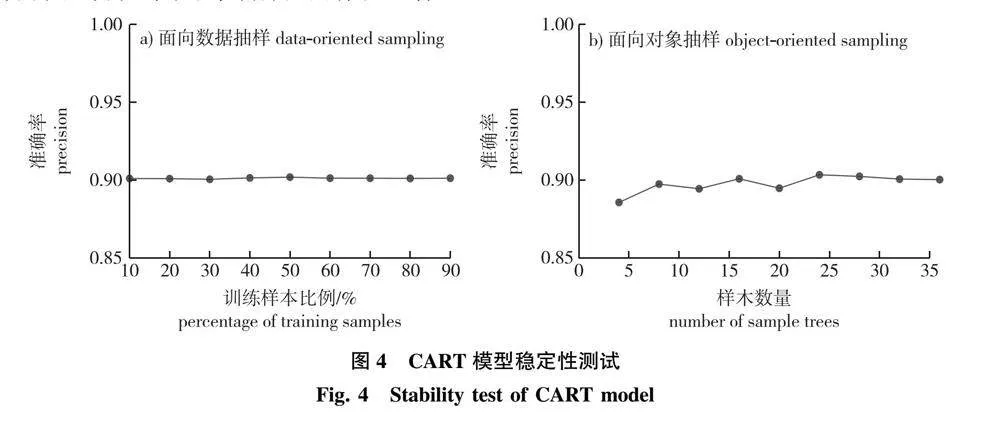
研究采用降低训练样本比例的方法测试调整改进CART模型的稳定性,分别使用面向数据和面向对象的方法对训练数据进行抽样,通过计算测试数据分类准确率验证分类模型在小样本下的分类精度。面向数据随机抽样时,分类模型精度随样本比例的增大没有显著变化,具有较好的稳定性,说明大部分树干与树叶点的邻域特征间存在显著差异;面向对象抽样时,分类模型精度仅在样本数小于30时存在一定波动,当训练样本数大于30时,分类模型精度表现较为稳定(图4),说明训练数据中样木的选取会影响分类结果,应优先选择具有代表性的样木数据进行训练。以上结果说明调整改进CART模型具有较高的稳定性,结合具有代表性的训练数据时,能够实现高精度的点云枝叶分类。
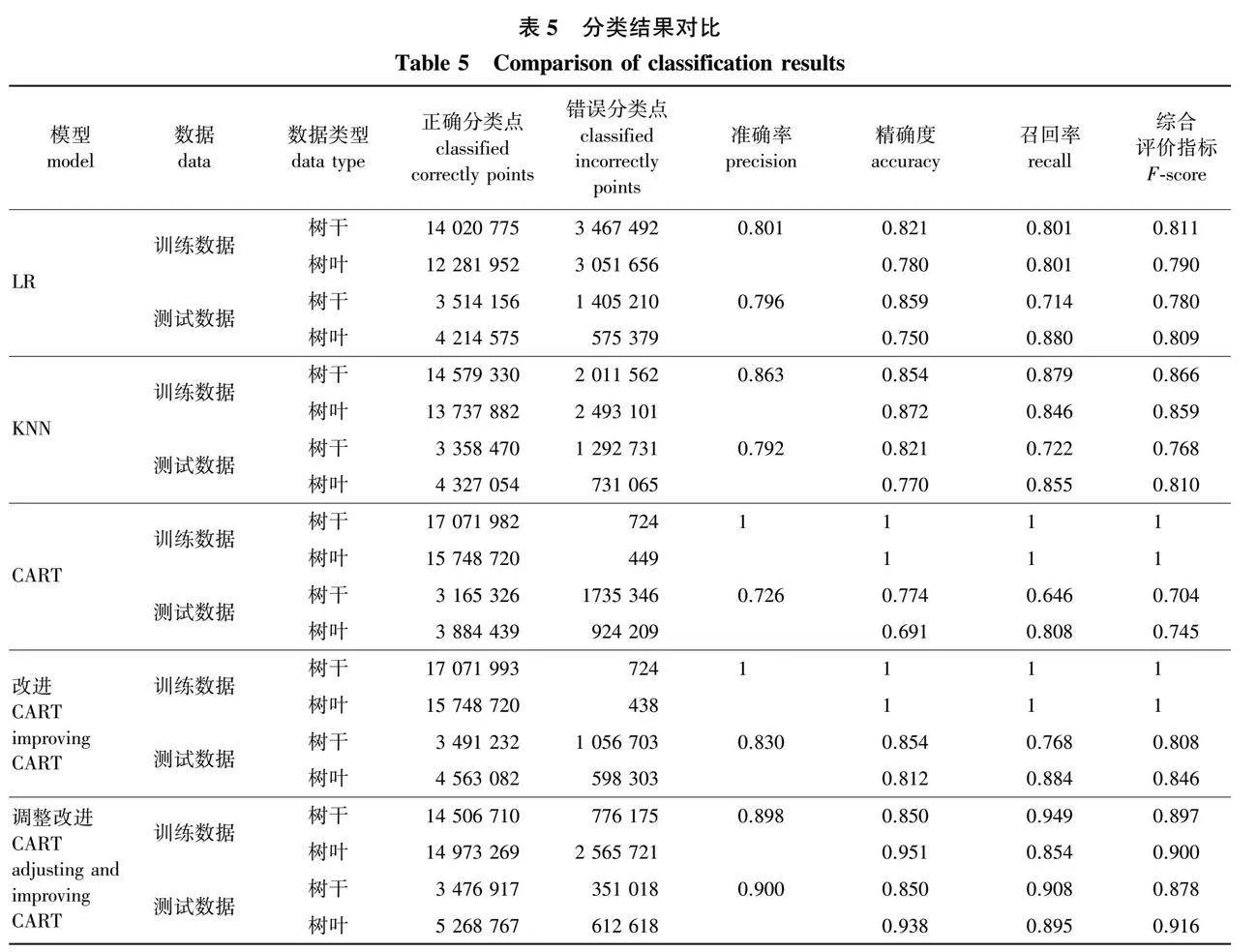
2.3 模型分类结果比较
通过计算整体与不同类别在训练与测试数据上的分类准确率、精确度、召回率和综合评价指标来评价模型分类精度。对比调整改进前后的CART与LR、KNN分类模型的精度评价指标(表5),3种模型对树叶的识别精度均高于树干,在测试数据上,LR与KNN模型对树叶点云的综合评价指标为0.809和0.810,而调整改进CART模型的综合评价指标为0.916,分别高出LR与KNN模型13.2%和13.1%,调整改进CART模型分类精度较高。而KNN与LR模型在测试和训练数据上的分类准确率差距分别为0.071和0.05,调整改进CART模型的差距为0.002,显著低于前者。特征描述子作为变量引入后,模型测试数据分类准确率提升了23.97%。调整改进CART模型对树叶与树干均有较好的识别能力,在分类精度上优于LR和KNN算法,且不存在数据过拟合现象,能够实现精准快速的枝叶点云分类。
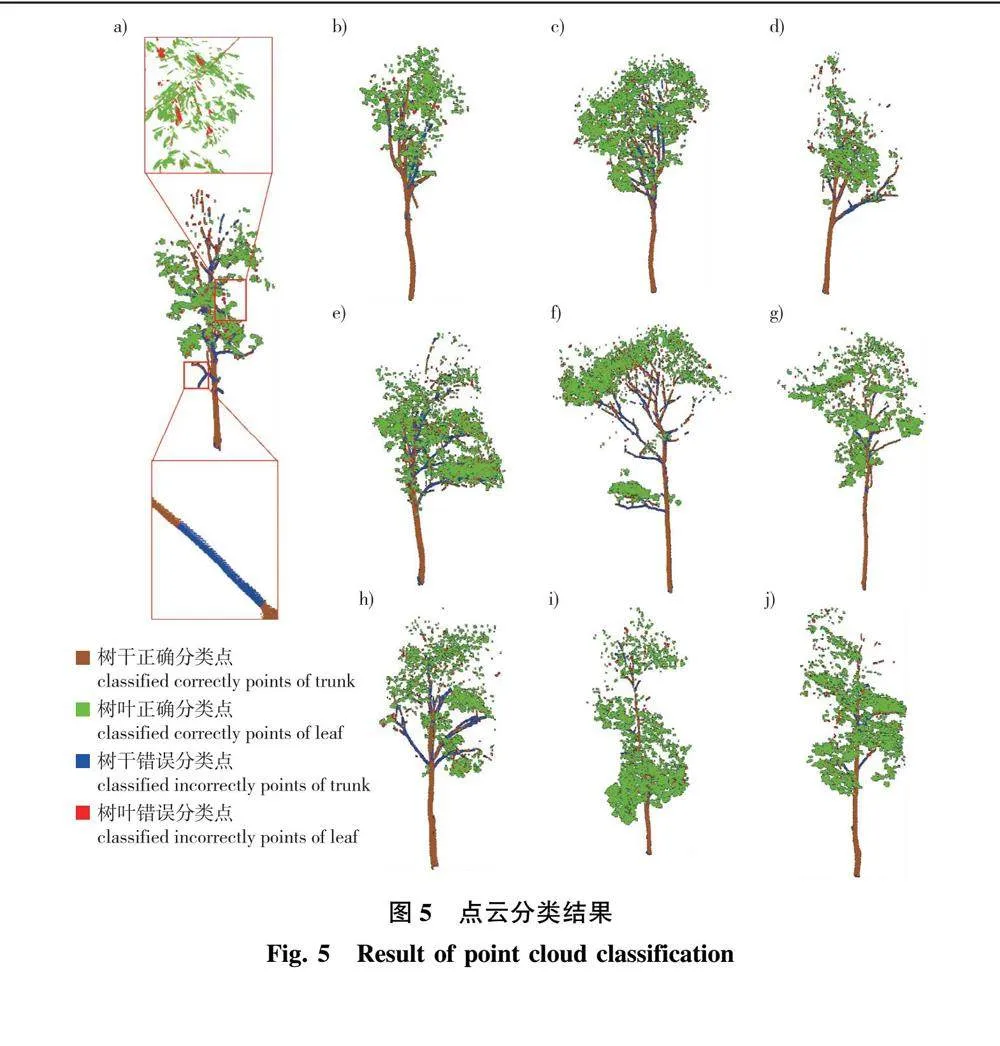
调整改进CART模型在测试数据上的分类结果见图5,其中棕色表示树干正确分类点,绿色表示树叶正确分类点,蓝色表示被错分的树干点,红色表示被错分的树叶点。研究提出的模型能够正确分类大部分数据,包括冠层中的树干点。但依然存在部分错分现象,例如部分垂直分布的叶片被错分为树干,或部分细枝条被错分为树叶,这是由于阔叶树冠层相互遮挡,导致部分点云存在缺失。存在缺失的点云数据差异不显著,造成了分类模型错分,但大部分数据依然被正确分类,可根据实际需求对数据进行后处理,减少错分点云带来的问题。
3 讨 论
研究提出了一种改进的分类回归树模型算法,针对次生林环境下采集的青冈地面激光点云数据,选用了合适的邻域搜索参数计算特征描述子,并通过引入特征描述子与调整决策树结构的方式对模型进行改进。该方法对树木的枝干部分具有较强的识别能力,在训练与测试数据上的分类准确率均在0.9左右,优于现有的监督[29]与非监督方法[9]。在引入平面性指数、曲率两个特征变量后,CART分类模型的测试数据准确率由0.726提升至0.830。与LR、KNN模型相比,调整改进CART模型在测试数据上的准确率比LR和KNN模型分别高13.1%、13.6%,且树干与树叶的综合评价指标均在0.9左右,训练与测试数据准确率差距远低于LR和KNN模型。模型的训练数据与测试数据分类精度差距仅为0.001,无过拟合现象,分类模型结果在测试数据不同类型上的召回率相近,优于汪献义等[16]的研究结果(精度差距为0.036)。调整改进CART模型决策节点数量仅有7 591个,且训练时间减少了48.7%。在保证点云分类精度的基础上,调整改进CART模型降低了模型运算量与内存占用,实现模型轻量化,提高了模型的可移植性,有利于模型的推广应用。模型分类精度在小样本上没有出现明显下降,说明该模型具有较好的稳定性。
高精度的枝叶点云分离,对于定量分析树木的生长生态过程具有重要意义。此前的枝叶分离算法研究大部分仅在人工林或非林地环境下采集的样本上取得了较好效果,如孙圆等[3]在城市林地环境下,对银杏(Ginkgo biloba)和无患子(Sapindus saponaria)使用激光强度校正模型进行枝叶分类,达到了约0.8的分类准确率,邢艳秋等[30]对东北林业大学实验林场人工林环境下的蒙古栎(Quercus mongolica)进行枝叶分类,采样9个特征描述子结合LightGBM分类模型进行分类,分类准确率约0.96。这些样木的干形结构相对简单,缺少对复杂地形条件下的枝叶分离研究的讨论。本研究的样木采集自丘陵地区次生林环境下生长的青冈栎单木,包含地形、林地环境、植物叶片遮挡等多种影响因素,其实验结果更接近实际的应用场景,具有更好的普适性。
改进的分类回归树模型在树木主干上能取得良好的分离效果,错误分类点主要集中在少数遮挡较为严重的侧枝或垂直分布的叶片上。此外,在面向数据和面向对象两种抽样方式下,调整改进CART模型均表现出优秀的稳定性。面向数据随机抽样时,分类模型精度随样本比例没有显著变化,大部分树干与树叶点的邻域特征间存在显著差异;而在面向对象抽样时,分类模型精度仅在样本数小于30时存在小幅度波动,训练数据中样木的选取会影响分类结果,在训练模型时应优先选择具有代表性的样木数据。由于传感器扫描角度等问题,调整改进CART模型对一些局部特征相似的点云识别能力较低,且研究样本仅来自次生林环境下的青冈栎单木数据。因此在后续研究中,将继续探索改进CART模型分类结果的后处理方法以及该模型在其他树种或林分环境条件下的适用性。
参考文献(reference):
[1]TAO S L,GUO Q H,XU S W,et al.A geometric method for wood-leaf separation using terrestrial and simulated lidar data[J].Photogram Engng Rem Sens,2015,81(10):767-776.DOI: 10.14358/pers.81.10.767.
[2]杨必胜,董震.点云智能研究进展与趋势[J].测绘学报,2019,48(12):1575-1585.YANG B S,DONG Z.Progress and perspective of point cloud intelligence[J].Acta Geod Cartogr Sin,2019,48(12):1575-1585.DOI: 10.11947/j.AGCS.2019.20190465.
[3]孙圆,林秀云,熊金鑫,等.基于地面激光强度校正数据的单木枝叶分离[J].中国激光,2021,48(1):0104001.SUN Y,LIN X Y,XIONG J X,et al.Separation of single wood branches and leaves based on corrected TLS intensity data[J].Chin J Lasers,2021,48(1):0104001.DOI: 10.3788/CJL202148.0104001.
[4]CALDERS K,DISNEY M I,ARMSTON J,et al.Evaluation of the range accuracy and the radiometric calibration of multiple terrestrial laser scanning instruments for data interoperability[J].IEEE Trans Geosci Remote Sens,2017,55(5):2716-2724.DOI: 10.1109/TGRS.2017.2652721.
[5]夏国芳,胡春梅,曹毕铮,等.激光入射角度对点云反射强度的影响研究[J].激光杂志,2016,37(4):11-13.XIA G F,HU C M,CAO B Z,et al.Study on the influence of laser incident angle on the reflection intensity of the point cloud[J].Laser J,2016,37(4):11-13.DOI: 10.14016/j.cnki.jgzz.2016.04.011.
[6]曹伟,陈动,史玉峰,等.激光雷达点云树木建模研究进展与展望[J].武汉大学学报(信息科学版),2021,46(2):203-220.CAO W,CHEN D,SHI Y F,et al.Progress and prospect of LiDAR point clouds to 3D tree models[J].Geomat Inf Sci Wuhan Univ,2021,46(2):203-220.DOI: 10.13203/j.whugis20190275.
[7]黄亮,许文雅,谭帅.树木三维点云的枝叶分割方法[J].北京测绘,2022,36(1):18-22.HUANG L,XU W Y,TAN S.3D point cloud segmentation method for branches and leaves of trees[J].Beijing Surv Mapp,2022,36(1):18-22.DOI: 10.19580/j.cnki.1007-3000.2022.01.004.
[8]FARMAKIS I,BONNEAU D,HUTCHINSON D J,et al.Supervoxel-based multi-scale point cloud segmentation using fnea for object-oriented rock slope classification using TLS[J].Int Arch Photogramm Remote Sens Spatial Inf Sci,2020,43:1049-1056.DOI: 10.5194/isprs-archives-xliii-b2-2020-1049-2020.
[9]林筱涵,李爱农,边金虎,等.基于网络图的地基激光雷达复杂树木点云枝叶分离方法[J].遥感技术与应用,2022,37(1):161-172.LIN X H,LI A N,BIAN J H,et al.A method for separating leaf and wood components of complex tree point cloud data based on network graph with terrestrial laser scanning[J].Remote Sens Technol Appl,2022,37(1):161-172.DOI: 10.11873/j.issn.1004-0323.2022.1.0161.
[10]WANG D,MOMO T" S,CASELLA E.LeWoS:a universal leaf-wood classification method to facilitate the 3D modelling of large tropical trees using terrestrial LiDAR[J].Me-thods Ecol Evol,2020,11(3):376-389.DOI: 10.1111/2041-210x.13342.
[11]WANG D,HOLLAUS M,PFEIFER N.Feasibility of machine learning methods for separating wood and leaf points from terrestrial laser scanning data[J].ISPRS Ann Photogramm Remote Sens Spatial Inf Sci,2017,IV-2/W4:157-164.DOI: 10.5194/isprs-annals-iv-2-w4-157-2017.
[12]VICARI M B,DISNEY M,WILKES P,et al.Leaf and wood classification framework for terrestrial LiDAR point clouds[J].Methods Ecol Evol,2019,10(5):680-694.DOI: 10.1111/2041-210x.13144.
[13]QI C R,YI L,SU H,et al.PointNet++:deep hierarchical feature learning on point sets in a metric space[C]//Proceedings of the 31st International Conference on Neural Information Processing Systems.December,2017,Long Beach,California,USA: ACM,2017:5105-5114.DOI: 10.5555/3295222.3295263.
[14]赵江洪,窦新铜,曹月娥,等.一种基于分割结果实现三维点云分类的方法[J].测绘科学,2022,47(3):85-95.ZHAO J H,DOU X T,CAO Y E,et al.A method for 3D point cloud classification based on segmentation results[J].Sci Surv Mapp,2022,47(3):85-95.DOI: 10.16251/j.cnki.1009-2307.2022.03.012.
[15]ZHOU J J,WEI H Q,ZHOU G Y,et al.Separating leaf and wood points in terrestrial laser scanning data using multiple optimal scales[J].Sensors,2019,19(8):1852.DOI: 10.3390/s19081852.
[16]汪献义,邢艳秋,尤号田,等.基于近邻几何特征的TLS林分点云分类研究[J].北京林业大学学报,2019,41(6):138-146.WANG X Y,XING Y Q,YOU H T,et al.TLS point cloud classification of forest based on nearby geometric features[J].J Beijing For Univ,2019,41(6):138-146.DOI: 10.13332/j.1000-1522.20180308.
[17]麻卫峰,王金亮,张建鹏,等.一种改进法向量估算的点云特征提取[J].测绘科学,2021,46(11):84-90,146.MA W F,WANG J L,ZHANG J P,et al.Feature extraction from point cloud based on improved normal vector[J].Sci Surv Mapp,2021,46(11):84-90,146.DOI: 10.16251/j.cnki.1009-2307.2021.11.012.
[18]梁冲. 面向树木特征提取的室外场景点云数据语义分类 [D]. 南京:南京师范大学, 2021.LIANG C. Semantic classification of outdoor scenic spot pointcloud data for tree feature extraction [D]. Nanjing: Nanjing Normal University, 2021.
[19]ZHU X,SKIDMORE A K,DARVISHZADEH R,et al.Foliar and woody materials discriminated using terrestrial LiDAR in a mixed natural forest[J].Int J Appl Earth Obs Geoinf,2018,64:43-50.DOI: 10.1016/j.jag.2017.09.004.
[20]卢晓艺,云挺,薛联凤,等.基于树木激光点云的有效特征抽取与识别方法[J].中国激光,2019,46(5):411-422.LU X Y,YUN T,XUE L F,et al.Effective feature extraction and identification method based on tree laser point cloud[J].Chin J Lasers,2019,46(5):411-422.DOI: 10.3788/CJL201946.0510002.
[21]PATEL H H,PRAJAPATI P.Study and analysis of decision tree based classification algorithms[J].Ijcse,2018,6(10):74-78.DOI: 10.26438/ijcse/v6i10.7478.
[22]王艳秋,徐传飞,于戈,等.一种面向不确定对象的可见k近邻查询算法[J].计算机学报,2010,33(10):1943-1952.WANG Y Q,XU C F,YU G,et al.Visible k-nearest neighbor queries over uncertain data[J].Chin J Comput,2010,33(10):1943-1952.DOI: 10.3724/SP.J.1016.2010.01943.
[23]刘刚,尹一涵,郑智源,等.基于三维点云的群体樱桃树冠层去噪和配准方法[J].农业机械学报,2022,53(S2):1-11.LIU G,YIN Y H,ZHENG Z Y,et al.Denoising and registration method of group cherry trees canopy based on 3D point cloud[J].Trans Chin Soc Agric Mach,2022,53(S2):1-11.DOI:10.6041/j.issn.1000-1298.2022.s2.021.
[24]张卉冉, 董震, 杨必胜, 等. 点云压缩研究进展与趋势 [J]. 武汉大学学报(信息科学版),2023,48(2):192-205.ZHANG H R, DONG Z, YANG B S, et al. Progress and perspectives of point cloud compression [J]. Geomatics and Information Science of Wuhan University,2023,48(2):192-205.DOI:10.13203/j.whugis20210103.
[25]CHENG X,ZENG M,LIN J P,et al.Efficient L0 resampling of point sets[J].Comput Aided Geom Des,2019,75:101790.DOI: 10.1016/j.cagd.2019.101790.
[26]DONG Z,YANG B S,LIANG F X,et al.Hierarchical registration of unordered TLS point clouds based on binary shape context descriptor[J].ISPRS J Photogramm Remote Sens,2018,144:61-79.DOI: 10.1016/j.isprsjprs.2018.06.018.
[27]张继超,刘宁,宋伟东,等.一种特征选择的全极化雷达影像分类方法[J].测绘科学,2022,47(6):127-134.ZHANG J C,LIU N,SONG W D,et al.A fully polarimetric radar image classification method based on feature selection[J].Sci Surv Mapp,2022,47(6):127-134.DOI: 10.16251/j.cnki.1009-2307.2022.06.016.
[28]卢华清,伍吉仓,张子健.面向地基激光点云的树木枝叶分离[J].中国激光,2022,49(23):156-167.LU H Q,WU J C,ZHANG Z J.Tree branch and leaf separation facing TLS point cloud[J].Chin J Lasers,2022,49(23):156-167. DOI:10.3788/CJL.202249.2310001.
[29]BECKER C,ROSINSKAYA E,HNI N,et al.Classification of aerial photogrammetric 3D point clouds[J].Photogramm Eng Remote Sensing,2018,84(5):287-295.DOI: 10.14358/pers.84.5.287.
[30]邢艳秋,蔡硕,汪献义.采用多尺度近邻体素特征的TLS林分点云分类[J].遥感信息,2021,36(5):1-7.XING Y Q,CAI S,WANG X Y.TLS point cloud classification of forest by multi-scale neighbor voxel features[J].Remote Sens Inf,2021,36(5):1-7.DOI: 10.3969/j.issn.1000-3177.2021.05.001.
(责任编辑 李燕文)
收稿日期Received:2022-11-04""" 修回日期Accepted:2022-12-28
基金项目:国家自然科学基金面上项目(31971578); 湖南省自然科学基金面上项目(2022JJ30078);湖南省科技创新计划(2023RC1065)。
第一作者:潘政尚(20201100030@csuft.edu.cn)。
*通信作者:孙华(sunhua@csuft.edu.cn),教授。
引文格式:潘政尚,马开森,龙依,等.
改进分类回归树模型的青冈枝叶点云分类研究[J]. 南京林业大学学报(自然科学版),2024,48(4):123-131.
PAN Z S, MA K S, LONG Y, et al.
An improved CART model for leaf and wood classification from LiDAR point clouds of Quercus glauca individual trees[J]. Journal of Nanjing Forestry University (Natural Sciences Edition),2024,48(4):123-131.
DOI:10.12302/j.issn.1000-2006.202211006.
猜你喜欢
阅读(快乐英语中年级)(2024年6期)2024-10-14 00:00:00
舰船科学技术(2022年20期)2022-11-28 08:23:02
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
科学与财富(2018年30期)2018-12-28 20:41:40
自动化学报(2018年7期)2018-08-20 02:59:04
自动化学报(2017年4期)2017-06-15 20:28:54
计算机应用(2016年9期)2016-11-01 17:57:12
周口师范学院学报(2016年5期)2016-10-17 06:36:47
体育科技(2016年2期)2016-02-28 17:06:21
电测与仪表(2015年3期)2015-04-09 11:37:56