
高密度椒盐噪声下混合滤波新方法
2024-09-12 00:00:00丁巧方振国
现代电子技术 2024年5期





摘" 要: 图像在采集、传输和处理过程中,易受环境、器材及处理方法的影响,不可避免地会产生不同程度的噪声。当噪声密度超过50%时,噪点信息在图像信息中占据主导地位,一般的中值滤波、均值滤波或自适应滤波等单一滤波方式存在着消除噪声的同时滤除了图像自身细节的问题,导致图像不清晰,滤波效果较差。由此提出高密度椒盐噪声下混合滤波新方法,采取降噪、去噪、强化边缘三个层级混合滤波,最后用噪声密度达到80%的图像进行测试验证,有效地滤除了噪声,恢复了图像的细节信息,得到了很好的效果。
关键词: 图像去噪; 混合滤波; 细节保护; 高密度噪声; 椒盐噪声; 边缘强化; 噪点信息; 自适应模糊中值
中图分类号: TN911.73⁃34; TP391" " " " " " " " 文献标识码: A" " " " " " " " " " "文章编号: 1004⁃373X(2024)05⁃0098⁃04
New method of mixing filtering under high⁃density salt⁃and⁃pepper noise
DING Qiao, FANG Zhenguo
(School of Physics and Electronic Information, Huaibei Normal University, Huaibei 235000, China)
Abstract: In the process of acquisition, transmission and processing, images are susceptible to the environment, equipment and processing methods, which will generate different degrees of noise inevitably. When the noise density exceeds 50%, the noise information dominates the image information. The general single filtering methods such as median filtering, mean filtering and adaptive filtering filters out the details of the image itself while eliminating noise, which results in unclear images and poor filtering effects. Therefore, a new method of mixing filtering under high⁃density salt⁃and⁃pepper noise is proposed. In the method, three levels of mixed filtering are adopted, named noise reduction, denoising and edge enhancement. Finally, the image with noise density of 80% is used for test and verification. The results show that the noise is filtered out effectively, the detailed information of the image is restored, and good results are obtained.
Keywords: image denoising; hybrid filtering; detail protection; high⁃density noise; salt⁃and⁃pepper noise; edge reinforcement; noise information; adaptive fuzzy median
0" 引" 言
图像在采集、传输和处理过程中,受环境、器材及处理方法的影响,不可避免地会产生不同程度的噪声[1],其中图像的椒盐噪声由图像的极值组成,在视觉上表现为黑白相间的亮暗点[2],会给图像的处理带来严重的问题,所以降低图像的椒盐噪声变得十分有意义。文献[3]提出了基于自适应中值滤波算法的研究和改进,避免了对信号点的处理。文献[4]提出了一种简单的椒盐噪声滤波算法,基于先定位后滤波的思想对噪点和信号点做了不一样的处理。当噪声密度过高时,图像的细节部分也可能被当成噪点进行处理,导致边缘模糊。文献[1]提出了具有去除椒盐噪声能力的改进双边滤波算法,对自适应模板进行替换,实现保边的同时能去噪,但是对噪点的去除效果下降,使得图像质量下降。文献[2]提出了一种去除椒盐噪声的自适应模糊中值滤波算法,引入了模糊系数和模糊变量,实现了对噪点不同可能性的处理,使得图像关键信息都得到了保护,但是该算法复杂程度高、不容易复现。针对以上细节保护和噪声滤除问题,对自适应模糊中值进行了优化并融合中值、双边滤波,即使在噪声达到80%时,处理效果依然不错,80%加噪图像如图1所示。
1" 算法的设计及实现
1.1" 降噪阶段
在高密度噪声下,噪点占主体,如果直接对图像进行处理,会出现将信号点当成噪点被处理掉,导致图像质量下降。先对图像进行多幅图像相加求平均的处理,来降低一部分噪声,降噪图像如图2所示。
假设[G(x,y)]是无噪声图像[f(x,y)]被噪声[η(x,y)]污染的图像,每对坐标[(x,y)]处噪声不相关。图像[g(x,y)]是通过[K]幅不同[G(x,y)]取平均得到的:
[g(x,y)=1ki=1kG(x,y)]" (1)
则满足:
[Eg(x,y)=f(x,y)] (2)
和
[σ2g(x,y)=1kσ2η(x,y)] (3)
式中:[σ2g(x,y)]和[σ2η(x,y)]分别是[g(x,y)]和[η(x,y)]在[(x,y)]处的方差。
则平均图像中任意一点处的标准差为:
[σgx,y=1kσηx,y]" (4)
式(4)表示当[k]增大时,像素值的变化将减小,[g(x,y)]将逼近[f(x,y)]。
1.2" 噪点去除阶段
自适应模糊中值的模糊系统就是通过测量数据来反映该系统的输入输出关系,并具有逻辑推理、数值计算和非线性函数的逼近能力。
设二维模糊系统[g(x)]为集合[U=[α1, β1]×[α2, β2]∈R]上的一个函数,解析式形式未知,假设对任意一个[x∈U],都能得到[g(x)],则可以设计一个逼近的模糊系统:
步骤1:在[[αi, βi]]上定义[Ni]([i]=1,2)个标准、一致和完备的模糊集:[A1i],[A2i],…,[ANii]。
步骤2:组建[M=N1×N2]条模糊集IF⁃THEN规则[Ri1i2μ]:如果[x1]为[Ai11]且[x2]为[Ai22],则[y]为[Bi1i2],其中,[i1]=1,2,…,[N1],[i2]=1,2,…,[N2],将模糊集[Bi1i2]的中心(用[yi1i2]表示)选择为:
[yi1i2=gei11,ei22] (5)
[fx=i1=1N1i2=1N2yi1i2μi1A1x1μi2A2x2i1=1N1i2=1N2μi1A1x1μi2A2x2] (6)
步骤3:根据[M=N1×N2]条规则构造的模糊系统[f(x)]来逼近[g(x)]。
本文采用疑似噪声点与窗口内相邻像素点的绝对灰度差的中值来定义模糊变量,因为中值比均值和最大值有更好的稳健性。先对含噪图像进行噪点检测,将灰度值为0或者255的值取为0,定义为疑似噪声点,其余值取为1,定义为信号点。
[Fi,j=0," " "x(i, j)=0 or 2551," " "otherwise] (7)
定义一个初始矩形窗口大小为3×3,计算该矩形窗口下[N(i, j)]的和。
[G3(i, j)=N(i, j)] (8)
若[G3(i, j)]gt;0,则提取窗口内那些不为0的点的灰度值,然后用中值代替[(i, j)]的灰度值;若[G3(i, j)]lt;0,则继续扩大窗口,直至有信号点出现。若窗口尺寸等于7×7,[G3(i, j)]仍然lt;0,则按照3×3窗口内与[(i, j)]相邻左上角4个元素的均值代替[(i, j)],重复以上步骤,直至图像遍历完成。经过以上步骤滤波后,图像数据大小基本确定。根据灰度值连续性,再定义一个模糊变量:
[D(i, j)=mediany(k,l)-x(i, j)]" (9)
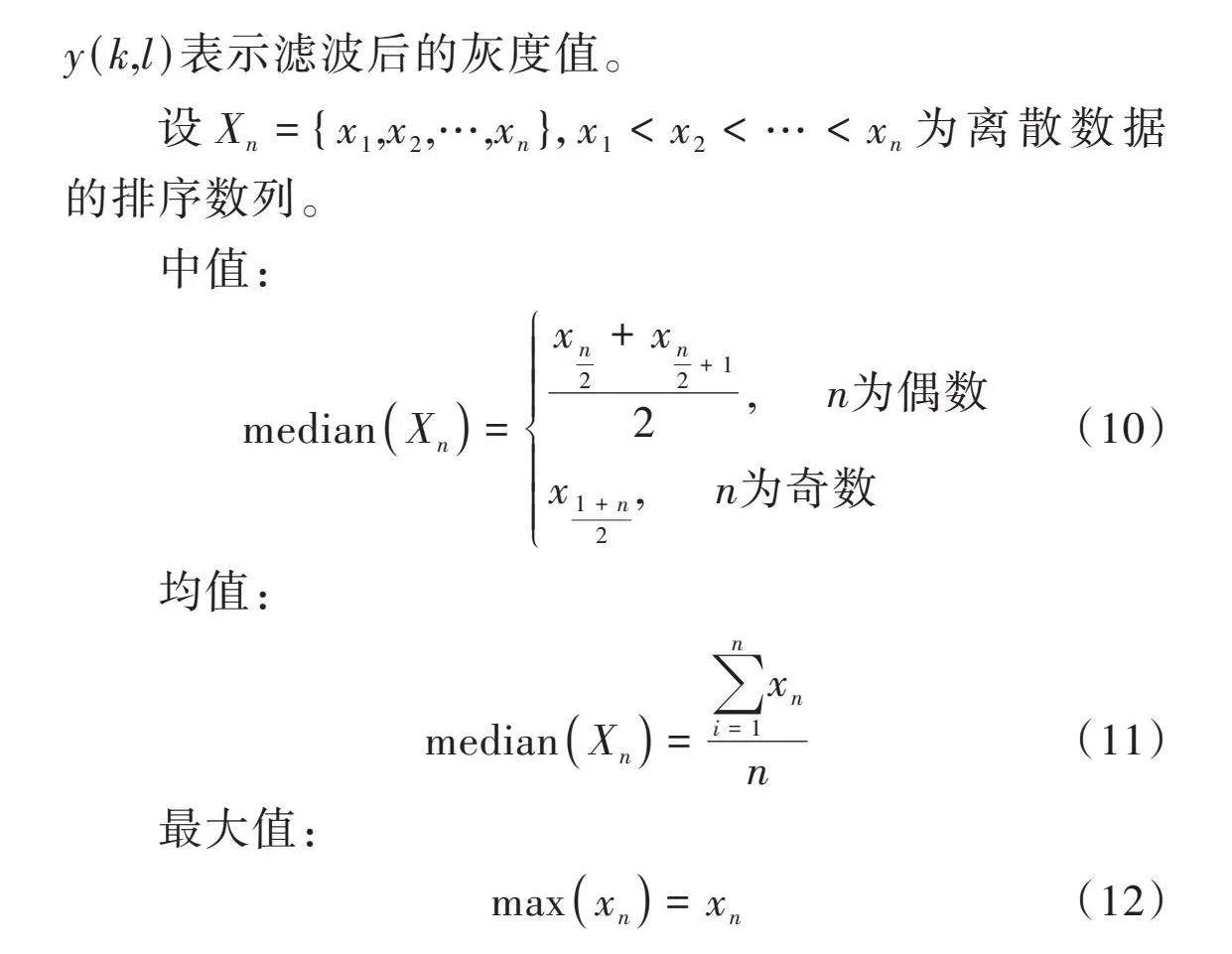
式(9)是用灰度差的中值定义的模糊变量,其中,[y(k,l)]表示滤波后的灰度值。
设[Xn={x1,x2,…,xn}],[x1lt;x2lt;…lt;xn]为离散数据的排序数列。
中值:
[medianXn=xn2+xn2+12," " " "n为偶数x1+n2," " " "n为奇数]" (10)
均值:
[medianXn=i=1nxnn] (11)
最大值:
[maxxn=xn] (12)
椒盐噪声在数据上的表现就是极大值或极小值,从式(11)、式(12)可以看出,椒盐噪声对均值和最大值影响较大,数据中只要有极值出现,均值就会偏斜,如图3、图4所示。
图3表示当有极大值出现时,均值偏大,图4表示当有极小值出现时,均值偏小,相比之下,中值更加稳健,因此当数据中有极值出现时,中值比最大值和均值有更好的稳健性。
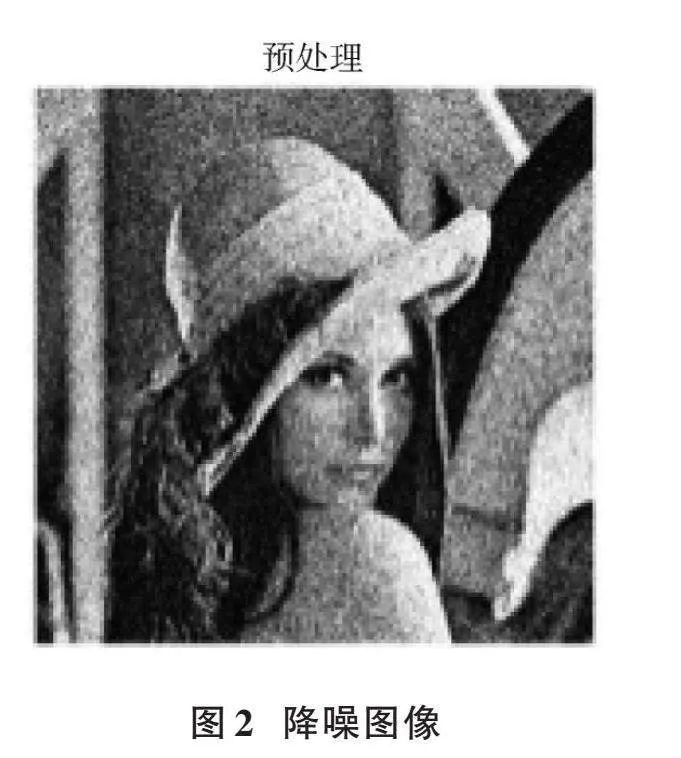
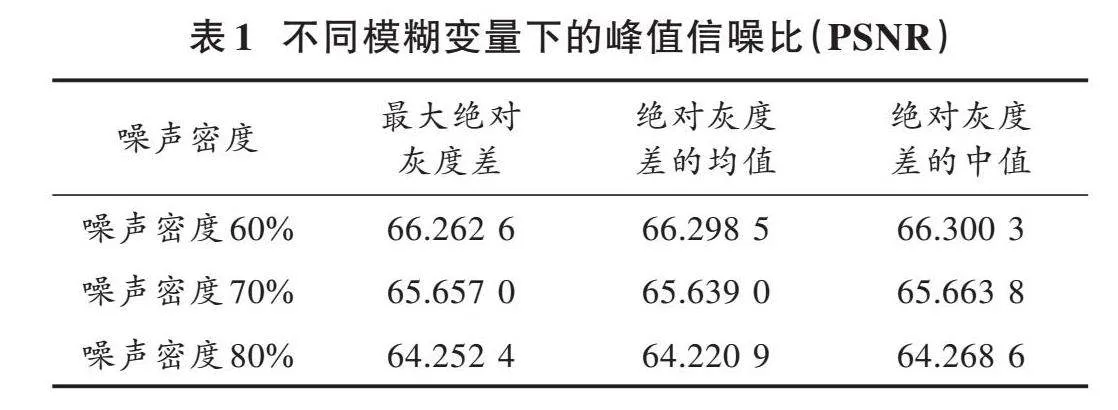
在相同噪声密度下,选用不同模糊变量得到的峰值信噪比如表1所示,可以看出绝对灰度差的中值作为模糊变量的PSNR整体上都提高了。
定义模糊隶属度函数来判断滤波之后的数值与原数值的误差。
模糊隶属度函数如下:
[Fi,j=0," " " " " " " " " " " " Di,jlt;T1Di,j-T1T2-T1," " T1≤Di,j1," " " " " " " " " " " " Di,j≥T2 lt;T2] (13)
式中:[T1]和[T2]分别表示[Di,j]的低阈值和高阈值。
[yi,j=1-Fi,j×xi,j+Fi,jMi,j] (14)
式中[Mi,j]为窗口自适应策略滤波后的值,误差均可用公式(14)统一表示。对于几乎没有误差时,[F(i,j)=0],保持原值输出;对于误差很大时,[F(i,j)=1],输出窗口自适应策略滤波后的[M(i,j)];当有一定误差时,利用模糊加权来输出最后的滤波结果。
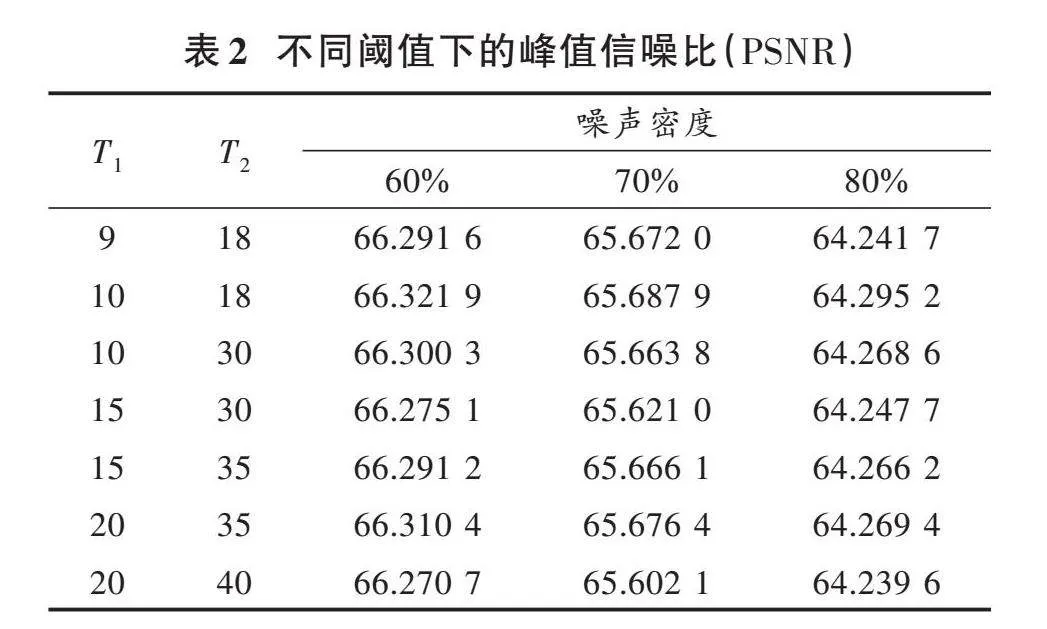
为了选取合适的[T1]、[T2]来进行滤波以达到最好的峰值信噪比(PSNR),选取了几组数据来记录滤波后的峰值信噪比如表2所示。
从表2可以看出:[T1=0.55⋅T2]左右时滤波效果比较理想;当[T2]gt;35时,PSNR减小;当[T1]=10、[T2]=18时,对不同密度噪声均有很好的去噪效果。因此,本文选择的参数为[T1]=10、[T2]=18。
自适应模糊中值依靠模糊系统去除了大概率噪声,因为模糊系统函数选择的主观性,在滤波后的图像中仍有一小部分噪声。中值滤波在处理小概率噪声消除上有比较理想的处理效果,所以在自适应模糊之后添加一次中值滤波来进行再次滤波,但是会模糊掉一些边缘细节。噪点去除结果如图5所示。
1.3" 强化边缘阶段
双边滤波是一种以高斯核为基础的非线性滤波,既有保边效果也有降噪平滑效果,采用了加权求平均的方法[5]。用中值滤波处理后的图像会模糊掉一部分边缘细节,添加双边滤波处理,不仅可以滤掉一些噪声还可以对被模糊的细节有一个增强的效果,这样最终得到的图像边缘比较清晰明显。
1.4" 实验结果及分析
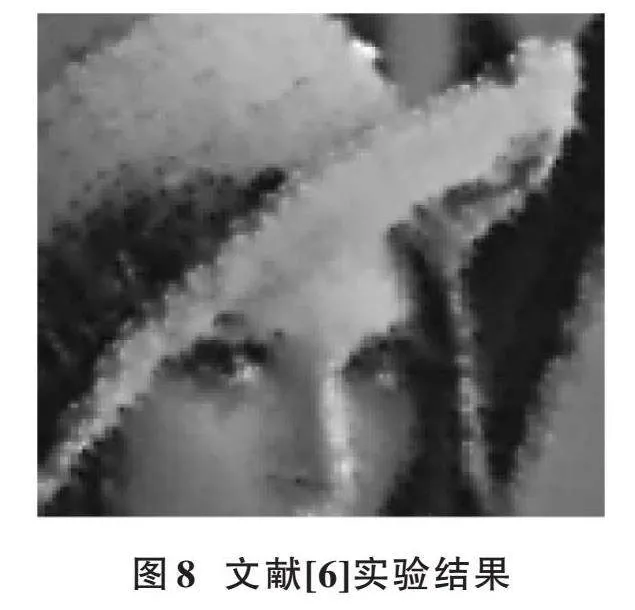
利用Matlab R2018b的实验环境,依据上述提出的混合滤波算法,对添加80%椒盐噪声的256×256的Lena图像进行仿真实验,如图6所示。为了验证本文算法的有效性,与文献[3]和文献[6]实验结果进行对比,如图7、图8所示。
从上述滤波结果可以看出,本文算法相比于各文献中所处理的结果边缘更加清晰,去噪能力也更明显。从算法结构上可知,该混合算法的有效性不仅体现在输出结果的稳定性上面,还体现在没有增加算法的复杂度,对于算法的复现很容易实现。
2" 结" 论
本文提出了一种在高密度椒盐噪声下的滤除算法,该算法分三步完成,其中去噪部分利用优化已有的算法来提高算法的有效性,从主观视觉分析上看,本文方法的结果相比于其他方法效果更佳。
注:本文通讯作者为方振国。
参考文献
[1] 周航,韩权.具有去除椒盐噪声能力的改进双边滤波算法[J].北京交通大学学报,2017,41(5):43⁃51.
[2] 万丰丰,周国民,周晓.一种去除椒盐噪声的自适应模糊中值滤波算法[J].浙江大学学报(理学版),2019,46(4):445⁃453.
[3] 赵玲玲.基于自适应中值滤波算法的研究与改进[J].现代计算机(专业版),2019,13(8):58⁃62.
[4] 董继扬,张军英.一种简单的椒盐噪声滤波算法[J].计算机工程与应用,2003(20):27⁃28.
[5] 徐武,张强,王欣达,等.基于改进Canny算子的图像边缘检测方法[J].激光杂志,2022,43(4):103⁃108.
[6] 陈初侠,丁勇,刘栎莉.去除椒盐噪声的自适应开关加权均值滤波[J].计算机工程,2010,36(4):210⁃212.
[7] 黄文笔,战荫伟,陈家益,等.改进的自适应中值滤波算法[J].计算机系统应用,2018,27(10):187⁃192.
[8] 陈从平,王健,秦武.高密度椒盐噪声图像开关自适应滤波算法[J].激光与红外,2011,41(7):817⁃821.
[9] 董林鹭,向洋,林国军,等.一种基于椒盐噪声密度的滤波算法[J].四川师范大学学报(自然科学版),2021,44(2):277⁃284.
[10] 郭慧娟,白文江,岳云霄,等.去除图像椒盐噪声的自适应迭代均值滤波算法[J].太原学院学报(自然科学版),2020,38(3):23⁃28.
[11] 曾宪佑,黄佐华.一种新型的自适应模糊中值滤波算法[J].计算机工程与应用,2014,50(17):134⁃136.
[12] 李强,陈初侠,黄涛,等.一种去除高密度椒盐噪声的中值滤波算法[J].电脑知识与技术,2021,17(35):137⁃139.
[13] 石昌友,孙强,卢建平,等.基于深度融合卷积神经网络的图像边缘检测[J].现代电子技术,2022,45(24):141⁃144.
[14] TOH K K V, MAT ISA N A. Noise adaptive fuzzy switching median filter for salt⁃and⁃pepper noise reduction [J]. IEEE signal processing letters, 2010, 17(3): 281⁃284.
猜你喜欢
摄影之友(影像视觉)(2020年4期)2021-01-09 10:10:10
数学学习与研究(2018年5期)2018-03-28 10:30:58
制导与引信(2017年3期)2017-11-02 05:17:02
数学学习与研究(2016年21期)2017-05-08 19:38:26
摄影之友(影像视觉)(2017年3期)2017-04-28 02:34:31
摄影之友(影像视觉)(2016年5期)2016-09-13 02:37:47
广东技术师范大学学报(2016年5期)2016-08-22 09:07:26
饮食科学(2014年5期)2014-06-18 09:42:17
电视技术(2014年19期)2014-03-11 15:37:54
山西大同大学学报(自然科学版)(2014年1期)2014-01-23 01:54:03
