
GNSS+1588v2高精度时间同步技术实现
2024-09-12 00:00:00王潇禾李雪梅廖麒
现代电子技术 2024年5期




摘" 要: 5G高精度时间同步是作为5G基站建设的重要要求之一,但随着5G室内基站数量呈现几何级数增长,使用GNSS授时同步时钟势必会存在很多限制,比如容易受场地环境的影响无法获取卫星信号、GNSS 接收机的成本突增,所以使用GNSS时钟同步技术不适合5G基站的大规模部署。文中提出一种基于OCTEON Fusion平台的GNSS+1588v2时间同步技术实现方案,其特点在于使用层次式同步,通过GNSS给一个时钟系统同步授时,被授时的时钟系统作为主时钟系统通过1588v2地面链路给下一级时钟系统授时,实现一个GNSS给多个基站同步授时。文中对现有的GNSS时钟同步授时进行分析,在此基础上提出一种基于OCTEON Fusion平台的GNSS+1588v2时间同步方案,在对此方案的同步精度和同步稳定性的测试中,时钟同步精度达到10 ns左右,同步稳定性达到10 ns以内。
关键词: 5G; 1588v2; GNSS; 时间同步; 同步精度; 同步稳定性
中图分类号: TN91⁃34" " " " " " " " " " " " " " " 文献标识码: A" " " " " " " " " " " 文章编号: 1004⁃373X(2024)05⁃0042⁃04
Implementation of GNSS+1588v2 high⁃precision time synchronization technology
WANG Xiaohe, LI Xuemei, LIAO Qi
(School of Mechanical and Electrical Engineering, Chengdu University of Technology, Chengdu 610059, China)
Abstract: 5G high⁃precision time synchronization is one of the important requirements for the construction of 5G base stations. However, with the exponential growth of the quantity of 5G indoor base stations, there are bound to be many limitations in using GNSS (global navigation satellite system) to time synchronous clocks, for example, being susceptible to the site environment and far from obtaining satellite signals, surge of GNSS receiver cost. Therefore, the use of GNSS clock synchronization technology is not suitable for large⁃scale deployment of 5G base stations. In view of this, a GNSS+1588v2 time synchronization technology implementation scheme based on the OCTEON Fusion platform is proposed. The scheme is characterized by synchronously timing a clock system by GNSS in manner of hierarchical synchronization. The clocked clock system is used as the main clock system to time the next clock system by the 1588v2 terrestrial link, so that a GNSS can synchronously time a plurality of base stations. In this paper, the existing GNSS clock synchronization timing is analyzed, based on which a GNSS+1588v2 time synchronization scheme on the basis of OCTEON Fusion platform is proposed. In the synchronization accuracy and synchronization stability test, the clock synchronization accuracy of the proposed scheme reaches about 10 ns, and its synchronization stability is kept within 10 ns.
Keywords: 5G; 1588v2; GNSS; time synchronization; synchronization accuracy; synchronization stability
0" 引" 言
目前国内电信运营商主要采用的时间同步技术是GNSS卫星授时同步技术[1]。这种方法主要是在各个基站上部署GNSS信号接收器,从而获得高精度的时间基准源用于同步各个基站内的时间,实现各个基站的时间同步[2]。然而随着5G部署数量的增大,室内基站也呈现几何数量的增长,势必会存在卫星信号覆盖盲区[3]。此外,GNSS信号接收器的安装和维护成本相对较高,不利于5G基站的大规模部署。
基于1588v2的本地高精度时间同步网络[4⁃5],通过网络中的时间链路传递承载设备配置1588v2功能,使得网络中间边界时钟节点的一个端口作为从时钟,与上级时钟保持同步,其他端口则作为下一级时钟系统的主时钟,生成新的1588v2报文向下游传递[6]。通过该方式将时钟源时间基准信号逐点传递至5G基站设备。
因此,将基站GNSS信号接收机规划到一定的数量范围,再结合通过在1588v2地面传输网实现高精度时间同步信号的传输技术[7],是一种既经济可行又可保证通信网实现高精度时间同步的方法。
1" 系统总体设计
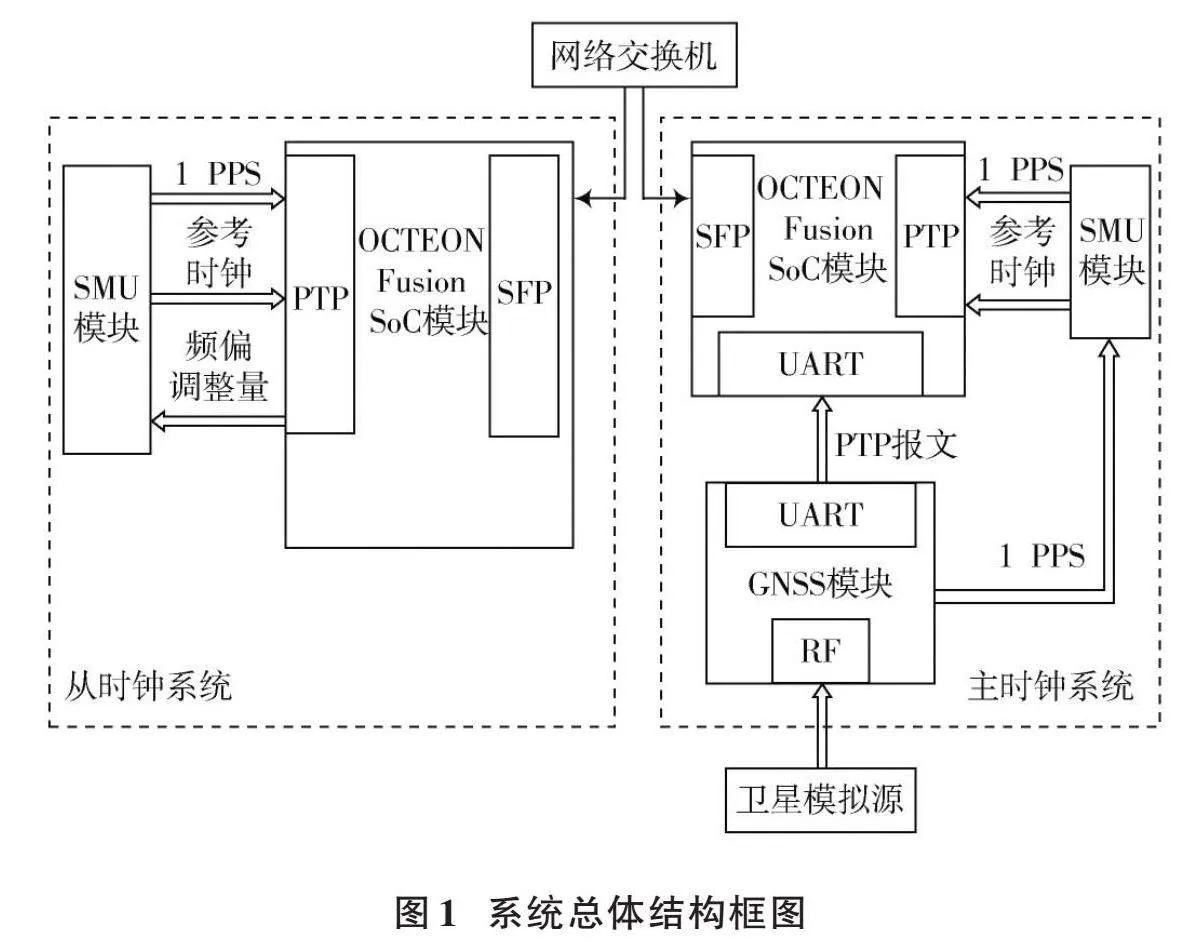
本文设计的同步系统由主从时钟系统组成,主从时钟系统结构差异主要体现在从时钟系统没有GNSS模块,所以下面只对主时钟系统进行阐述。系统主要包含三大模块:OCTEON Fusion SoC模块、SMU模块、GNSS模块。OCTEON Fusion SoC模块主要实现1588v2报文的收发、链路延迟和偏移量及频率偏移量的计算、补偿调整同步时间;SMU模块主要实现锁定GNSS模块输出的1 PPS,提供实现1588v2功能所需的1 PPS和参考时钟;GNSS模块主要接收卫星模拟源所发射的信号,并解析出NMEA报文传输到OCTEON Fusion SoC。系统总体框图如图1所示。
2" 1588v2同步原理
主从时钟系统周期性地通过连续交换报文发送与接收时刻的时间戳,基于链路对称性[8],从时钟通过同步算法计算偏移量并进行时间调整,以实现与主时钟系统同步[9⁃10]。
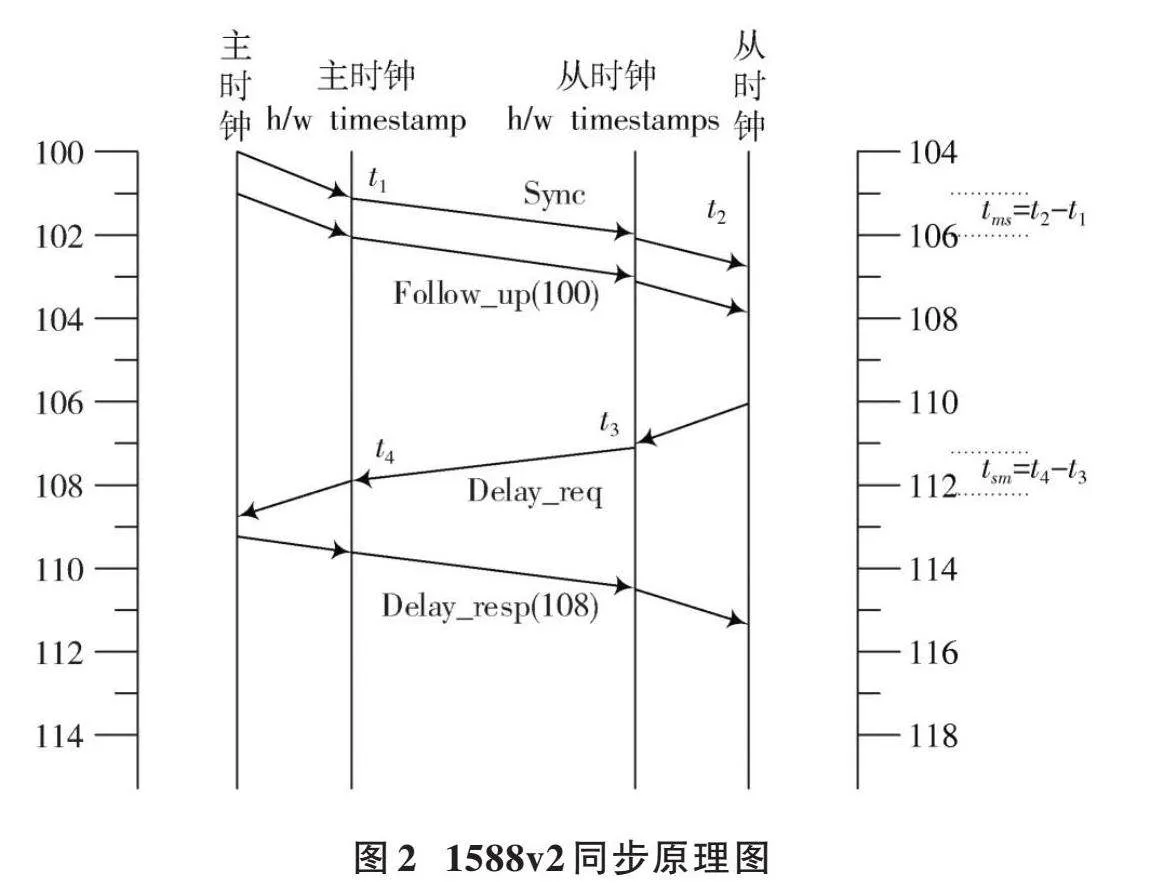
本文采用E2E延时机制[11],在two_step模式下[12],主时钟发送Sync报文[13],记录Sync报文离开的时刻[t1] timestamp,随后主时钟将[t1] timestamp填充到Follow_up报文里,发送到从时钟侧;从时钟侧接收到Sync报文,记录Sync报文到达从时钟侧的时刻[t2] timestamp,接收到Follow_up报文并从中获取[t1] timestamp;从时钟然后发送Delay_req报文,记录Delay_req报文离开从时钟侧的时刻[t3] timestamp。
主时钟侧接收到Delay_req报文,记录下Delay_req到达时刻[t4] timestamp,随后主时钟将[t4] timestamp填充到Delay_resp报文,发送到从时钟侧。从时钟侧收到Delay_resp报文并从中获取[t4] timestamp,这样经过前面连续的交换报文过程后,从时钟侧获取到了[t1]、[t2]、[t3]、[t4]四个timestamp,通过下面的公式可计算出链路延迟和偏移量。整个报文交互过程如图2所示。
由图2可知,由[t1]、[t2]时间戳可以得到[tms]。
[tms=t2−t1=delay+offset] (1)
式中:delay为链路延迟;offset为偏移量。
由[t3]、[t4]时间戳可以得到[tsm]。
[tsm=t4-t3=delay−offset] (2)
联合式(1)和式(2)可以得offset和delay。
[offset=(tms−tsm)2] (3)
[delay=(tms+tsm)2] (4)
所得到的offset和偏移量经过OCTEON Fusion SoC补偿处理后,实现主从系统的时间同步。
3" 主从时钟系统同步过程
3.1" 主时钟系统同步过程
主时钟系统的GNSS 模块通过RFmodule接收来自卫星模拟源的信号,经过Digital module处理输出1 PPS信号和1 PPS+TOD信号。SMU模块配置一个DPLL通道为锁相模式,锁定GNSS模块输出的1 PPS信号,输出参考时钟驱动OCTEON Fusion SoC内部的PTP功能模块,输出的1 PPS信号用于PTP模块捕获1 PPS信号边沿来到时PTP模块的TOD counter在此时刻的timestamp。ts2phc工具用于维持GNSS输出的TOD与OCTEON Fusion SoC内部的TOD之间的同步,OCTEON Fusion SoC内部的PTP每检测到一次DPLL输出的1 PPS信号边沿,触发ts2phc软件执行一次同步操作,即触发ts2phc的slave线程取用从UART获取的NMEA protocol,并解析出GNSS TOD,同时获取捕获的1 PPS信号在边沿时所记录的timestamp,将两者用于计算offset,计算出的offset经过servo处理后得到补偿调整信息adjust TOD,输入到OCTEON Fusion SoC的TOD counter,从而实现主时钟系统与GNSS的同步。
同时,ptp4l master进程通过NetWork接口进行PTP报文同步,给从时钟系统授时。主时钟系统同步流程如图3所示。
3.2" 从时钟系统同步过程
从时钟系统与主时钟系统的同步过程存在几处差异,主要体现在从时钟系统不带GNSS模块,SMU模块配置TOD counter, OCTEON Fusion SoC工作机制不同。
从时钟系统的DPLL通道配置为DCO模式,输出的参考时钟用于驱动OCTEON Fusion SoC的PTP功能。Linux系统加载SMU对应的驱动后生成一个对应TOD counter的设备,SMU的TOD counter输出的1 PPS信号用于捕获PTP模块的TOD counter的timestamp。ts2phc工具用于维持SMU内部的TOD counter与OCTEON Fusion SoC的TOD counter的同步,OCTEON Fusion SoC每检测到一次1 PPS信号边沿,触发ts2phc软件执行一次同步操作。
从时钟系统通过Network接口接收来自主时钟系统的1588v2报文,ptp4l slave进程计算出的offset在经过servo得到频偏补偿调整量作用到SMU的DCO通道,从而实现与主时钟系统的同步。从时钟系统同步流程如图4所示。
4" 测试验证
本设计通过RIGOL示波器捕获主从系统的1 PPS信号,来验证本文设计的1588v2同步精确度。通过日志工具打印来验证本文设计的1588v2同步稳定性。
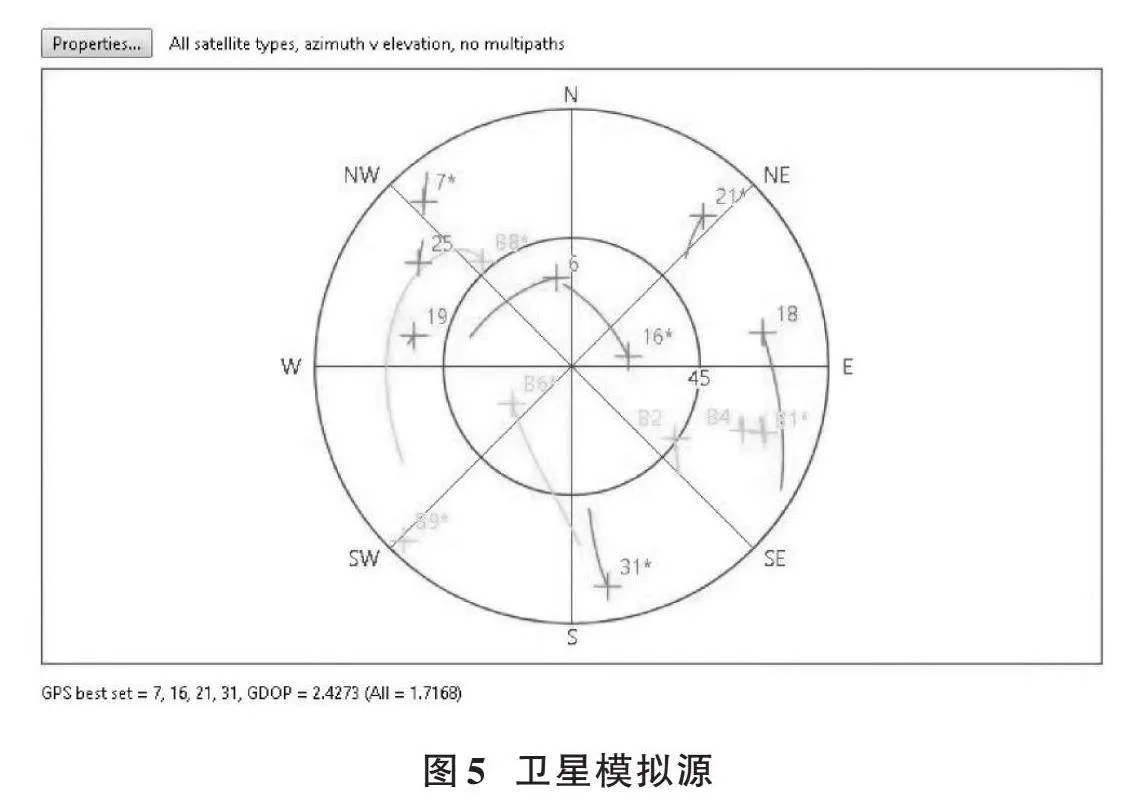
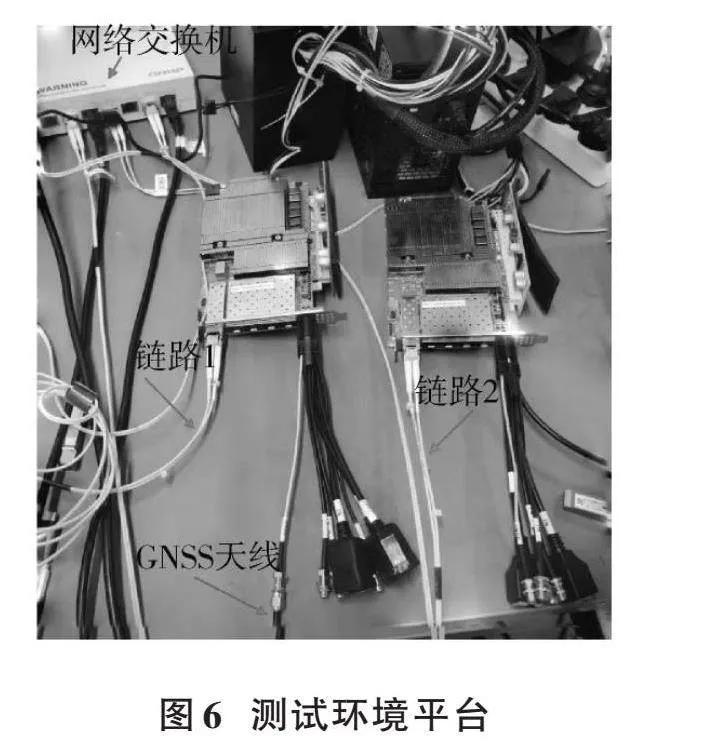
本文设计的主从系统是基于OCTEON Fusion系列芯片的硬件板卡,SMU模块采用瑞萨的ClockMatrix系列,GNSS模块采用的是泰斗T系列授时模块。GNSS星座模拟器使用SpirentGSS7000系列来模拟卫星信号,模拟源发星情况如图5所示。其测试平台如图6所示。从图6可以看到,主从系统是相互独立的硬件板卡,主时钟系统通过GNSS天线接收卫星信号,开始主时钟系统的同步过程,从时钟系统通过链路2和链路1接收主时钟系统的1588v2报文,开始从时钟系统的同步过程。
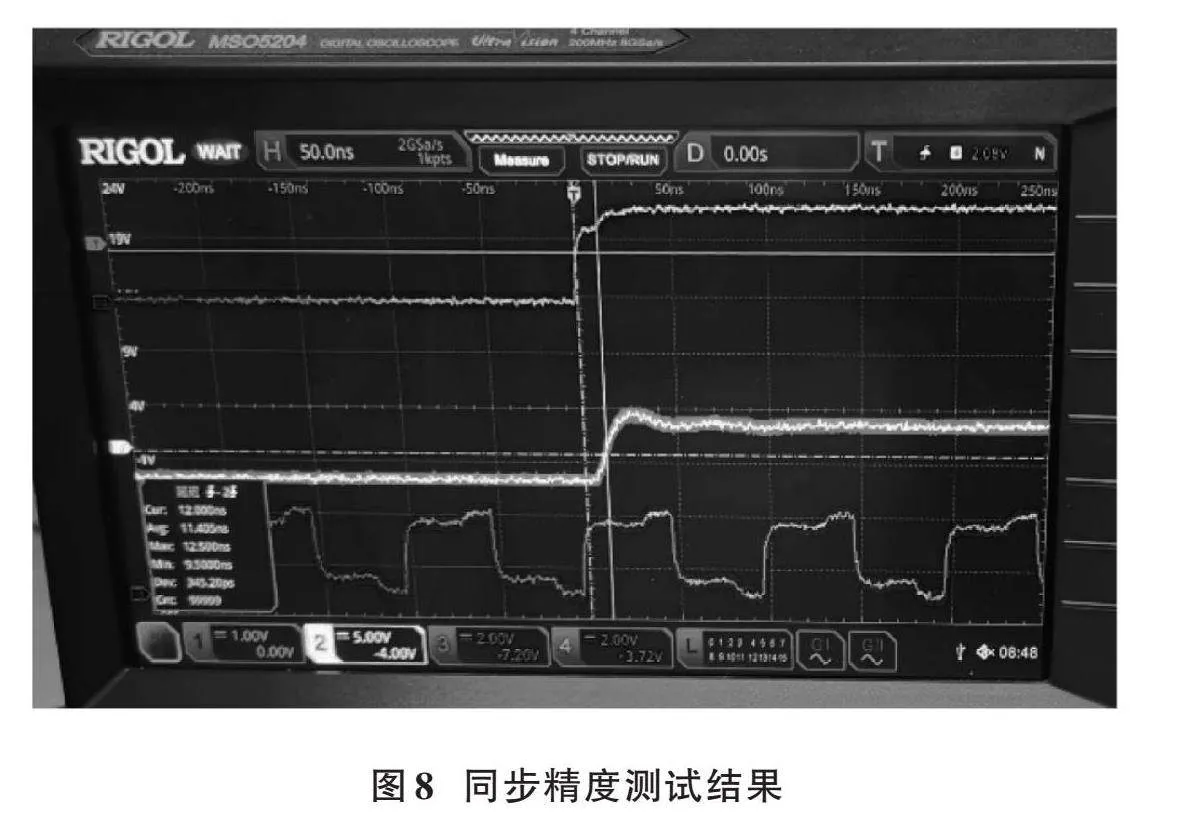
本文设计使用USB⁃TypeC转接线来提供示波器测试点和串口调试口。通过从系统的串口登录进入板卡根目录后,运行1588v2 slave脚本,待ptplog日志打印显示rms值,预期结果稳定在30 ns以内,即1588v2同步稳定完成,实际测试结果在10 ns以内,符合预期结果。其测试结果如图7所示。1588v2同步完成后,主从时钟系统通过USB⁃TypeC的OUT⁃SMA输出口分别连接至示波器的2通道和4通道,以主时钟系统输出作为触发通道,观察两者的相位差。预期结果相位误差应该在1.5 μs以内,实际相位误差在10 ns左右,很好地达到预期结果。其测试结果如图8所示。
5" 结" 语
文中详细阐述了一种基于OCTEON Fusion平台的GNSS+1588v2的同步技术实现方案,并且通过示波器和串口调试工具在硬件平台上验证了设计的稳定性、时间同步精度要求以及方案的可行性。本文设计达到时间同步精度标准的情况下,实现GNSS一对多的时钟同步授时,减少了GNSS接收机部署的数量,为5G基站大量部署提供了一种可行方案。本文设计还可以进一步优化,日后会考虑支持1588v2+SyncE、支持GPS和北斗模式随时切换、支持卫星信号断开后系统守时24 h等功能。
参考文献
[1] 包其齐,连世龙.一种基于IEEE 1588v2协议的5G时间同步方案[J].长江信息通信,2023,36(3):182⁃184.
[2] 赵良,张贺,魏步征,等.基于北斗和1588v2的5G基站时间同步应用探讨[J].通信世界,2021(16):35⁃37.
[3] 黄玉宝,王伦锁,王广远.浅析IEEE 1588v2在通信行业的部署方案及应用[J].数字通信世界,2020(2):9.
[4] 高兆强.基于IEEE 1588v2的无线网络时间同步技术[J].通信技术,2021,54(1):147⁃151.
[5] 古方奎,林何平.IEEE 1588v2时间同步网部署方案及应用场景的分析[J].电信工程技术与标准化,2020,33(1):66⁃70.
[6] 卢建福,程明,蒋清宏.1588v2协议在PTN中的实现[J].光通信技术,2021,45(9):59⁃62.
[7] 李由由.基于PTP+SyncE的时间同步技术研究与实现[D].北京:中国科学院大学(中国科学院国家授时中心),2021.
[8] 房晓瑜,王京梅,晏子杰,等.基于FPGA的PTP时间同步技术实现[J].电子科技,2019,32(11):43⁃46.
[9] 贾卫卫.基于IEEE 1588v2协议的LTE小基站时钟同步系统研究[D].大连:大连交通大学,2020.
[10] 封栋,陈晓.基于PTP的加权时钟同步算法[J].网络新媒体技术,2021,10(5):30⁃36.
[11] 程华,范雯,于佳亮,等.利用PTP技术计算传输链路频率偏差的探索[J].电信工程技术与标准化,2022,35(10):88⁃92.
[12] 陶征亮.基于IEEE 1588协议的高精度时钟同步技术研究[D].赣州:江西理工大学,2022.
[13] 任昕旸.基于PTP的高精度网络时间同步系统的研究与优化[D].北京:北京邮电大学,2020.
猜你喜欢
汽车电器(2022年9期)2022-11-07 02:16:24
铁道通信信号(2020年4期)2020-09-21 09:15:24
中国外汇(2019年11期)2019-08-27 02:06:30
制造技术与机床(2017年6期)2018-01-19 02:41:22
北京航空航天大学学报(2017年9期)2017-12-18 07:12:33
光学精密工程(2016年3期)2016-11-07 09:03:34
铁道通信信号(2016年8期)2016-06-01 12:10:21
测绘科学与工程(2016年6期)2016-04-17 06:51:25
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
