
磁悬浮轴承系统辨识与鲁棒控制
2024-08-31 00:00:00王艺宇周瑾徐园平周扬张一博
机械制造与自动化 2024年3期
关键词:鲁棒控制












摘 要:为解决传统鲁棒控制器设计中存在的磁悬浮轴承被控模型建模复杂且难以准确建模的问题,运用正交多项式拟合方法,对模态实验测得转子的刚体模态及弯曲模态频响数据进行系统辨识,建立磁悬浮轴承转子系统被控模型;基于系统辨识所建立的磁悬浮轴承被控模型进行H∞鲁棒控制器设计。实验结果证明:基于系统辨识模型的鲁棒控制器能够实现转子的稳定悬浮及对转子刚体模态的控制。
关键词:磁悬浮轴承;鲁棒控制;系统辨识
中图分类号:TH133.3文献标志码:A文章编号:1671-5276(2024)03-0204-05
System Identification and Robust Control of Magnetic Suspension Bearing
Abstract:Regarding the complexity and dificulty in accurate modeling of magnetic suspension bearing rotor in the design of traditional robust controllers, the orthogonal polynomial fitting method is applied to measure the rigid body mode and systematically identify frequency response data of bending mode of the rotor through the modal experiment, and the controlled model of the magnetic suspension bearing rotor system is established. An H∞ robust controller is designed based on the controlled model of the maglev bearing established by system identification. The experimental results prove that the robust controller based on the system identification model can realize the stable suspension of the rotor and control the rigid body mode of the rotor.
Keywords:magnetic suspension bearing; robust control; system identification
0 引言
磁悬浮轴承主要依靠电磁力对转子进行控制,使转子悬浮在指定位置。磁悬浮轴承的振动控制一直是研究的核心问题之一。鲁棒控制器由于其抗干扰能力强,能够保证系统参数在一定范围内摄动均能实现稳定等优势,已经在磁悬浮轴承转子系统控制中得到了广泛的应用。
目前关于磁悬浮轴承鲁棒控制器已经做了一定研究,MUSHI等[1]针对压缩器中转子所受气动载荷的影响,设计了μ综合鲁棒控制器,有效抑制了系统中存在的扰动。RAN等[2]分别设计了H∞及μ综合鲁棒控制器,实现了磁悬浮轴承系统的过临界。
鲁棒控制器的设计依赖于被控模型的建立。由于磁悬浮轴承系统复杂,很难快速地建立精准被控模型。系统辨识为被控模型的快速搭建提供了可能性,同时辨识的模型在频域具备更好的拟合性,因此可以基于系统辨识的被控模型建模快速设计鲁棒控制器。VAZQUEZ等[3]对磁悬浮轴承转子模型进行了系统辨识;孙喆等[4]通过磁悬浮轴承扫频激励,提出了一种柔性转子模型测试与辨识的方法。
本文采用正交多项式拟合法对磁悬浮轴承转子系统进行频响辨识,选取合适的频段辨识系统模态参数,从而得到所需的被控模型;基于所辨识的被控模型进行H∞鲁棒控制器设计,最终通过实验验证了所设计控制器的有效性。
1 系统模型辨识
1.1 正交多项式拟合原理
对于图1所示的多自由度系统,其节点与节点之间存在一定的频响关系[5],可以写成如下有理分式多项式。
式中:分母阶次n=2N;分子阶次m=n-2。此时分子分母多项式可以分别表达为
将式(1)分子、分母同除bn,在拟合过程中引入负频率[6],满足H(jω-i)=H(-jωi)=H*(jωi)。
将式(1)左右同乘分母多项式并基于最小二乘法将其线性化,得到拟合方程为
式中:X=-Re(PHQ); Y=0.5(PHP+PTP*); Z=0.5(QHQ+QTQ*); G=Re(PHW); F=Re(QHW); C=(a0,a1,…,am)T; D=(b0,b1,…,bn-1)T;
将幂基多项式转化为Forsythe复正交多项式,其表达式形式如下:
1.2 转子系统拟合
基于上文所述的有理多项式拟合方法[7],本节开展磁悬浮轴承转子系统的拟合。通过模态敲击实验可以得到转子所需两节点之间的频响数据,基于此类数据,进一步开展被控模型辨识,并以此作为控制器设计的基础。
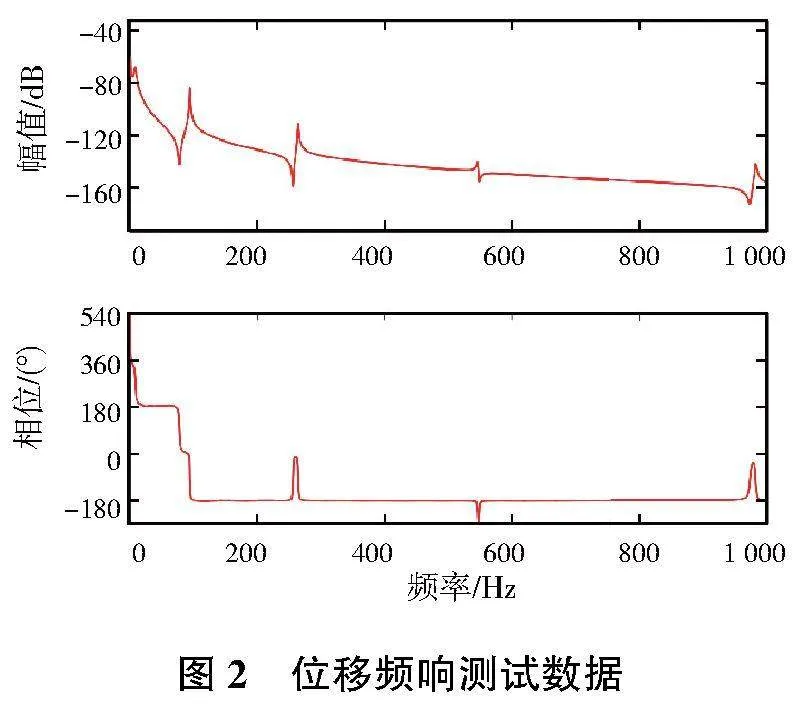
图2为转子系统测得位移频响数据,拟合一阶模态需采用二阶传递函数。在控制器被控模型设计中,首先需要拟合的为转子的刚体模态,此时选取频段0~30Hz进行模型拟合,其拟合曲线如图3所示。
通过图3(a)局部放大可以看出,由于模态敲击实验中很难做到自由—自由态,因此存在一定的支承刚度,刚体模态频率不为0。此时由于拟合曲线仅由刚体模态决定,所拟合的频响模型与实验频响曲线幅值存在一定差距,但总体趋势保持一致。为了保证辨识模型的准确,对此模型进行修正,使其刚体模态频率接近0。图中3曲线为修正后模型的频响曲线,其传递函数如下:
从式(5)可得刚体模态频率为2Hz,从图3中可以看出其拟合性得到了明显的改善。将所辨识的转子模型代入磁悬浮轴承转子系统模型中,由图3(b)可以看出,辨识被控模型曲线与扫频实验频响曲线具有较好的拟合性。
为了验证系统拟合方法对磁悬浮轴承转子系统弯曲模态辨识的有效性,选取3~30Hz、246~400Hz,辨识转子的刚体模态及二阶弯曲模态,选用四阶传递函数进行拟合,其拟合传递函数如下:
柔性模态辨识曲线对比如图4所示,此时辨识被控模型曲线与实验测得频响函数拟合性较好。传递函数由刚体模态及二阶弯曲模态叠加而成,因此未出现前文所述的刚体模态频率不为0导致的拟合不准确问题。通过上述拟合实验验证了系统拟合的可行性与有效性。
2 控制器设计与仿真
2.1 鲁棒控制器理论
鲁棒控制系统的结构如图5所示,P(s)为被控对象,F(s)为控制器模型;e1(t)、e2(t)为系统传递中的中间变量。输入u1(t)到输出y1(t)的传递函数可以表示为Ty1u1。小增益定理如图所示[8],M(s)为线性控制系统,Δ(s)为一未知增益函数,当且仅当小增益条件
M(jω)Δ(jω)<1,ω∈R(7)
满足时,系统对于所示系统对稳定的Δ(s)都是内部稳定的。外部干扰信号会在环路中逐渐衰减掉以实现内部稳定。
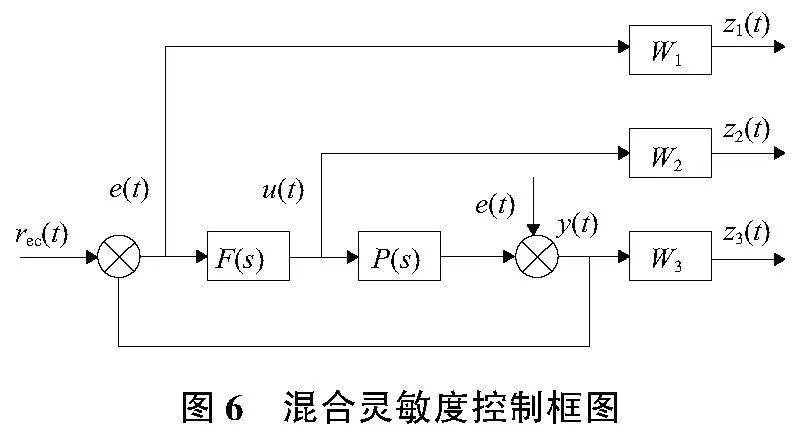
混合灵敏度问题是H∞鲁棒控制器设计中常用的设计方法,其将系统的鲁棒性问题及跟踪性能问题转化为一般灵敏度问题进行求解,其设计原理如图6所示。
图6中rec、e、u、d、y和z分别为参考输入、跟踪误差、控制信号、干扰信号、输出信号、观测信号。W1、W3分别为需要设计的灵敏度、补灵敏度加权函数,W2为加性不确定性加权函数。
灵敏度函数S(s)表达式如下:
其反映了系统追踪信号的能力及对扰动的一致能力,一般要求其在低频段增益越小越好。
补灵敏度函数T(s)表达式如下:
其反映了系统对高频不确定性扰动的抑制能力,一般要求其在高频段增益越小越好。
其可避免控制电压的饱和,同时又影响控制系统的带宽,因此其增益应适当选择既不能过大又不能过小。根据鲁棒控制定理,在加权函数的设计过程中需满足:
2.2 鲁棒控制器设计与仿真
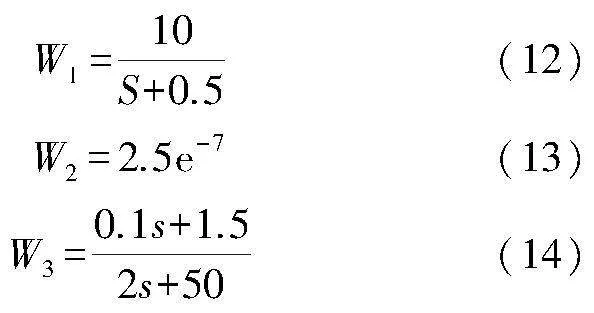
根据上文设计加权函数可得:
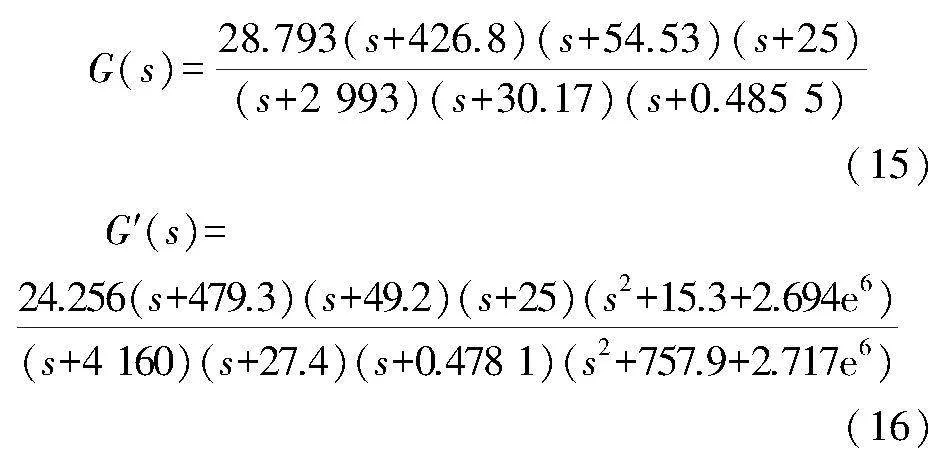
将上述加权函数代入混合灵敏度框图,得到广义被控模型P(s)并求解鲁棒控制器模型:
式(15)为基于刚体模态辨识模型式(5)设计的H∞控制器模型,式(16)为基于刚性模态及柔性模态式(6)设计的H∞鲁棒控制器模型。下面以式(15)分析H∞鲁棒控制器性能。
由图7可知所设计的鲁棒控制器在低频段呈现了积分效应,在中频段呈现了类似PD控制器的频响特性。
3 实验
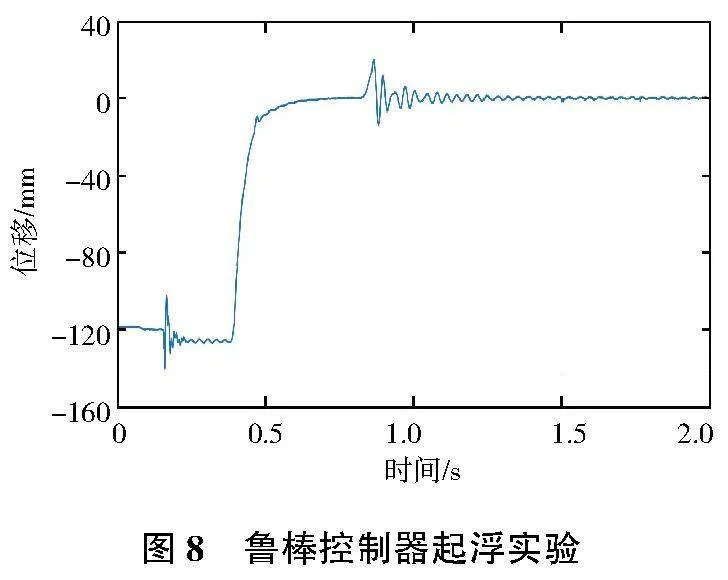
对所设计的H∞鲁棒控制器进行静态悬浮实验,以刚体模态控制器为例,其效果如图8所示。
由图8可知,转子超调量较小,在1.0s内便完成了转子的静态悬浮,具有较好的起浮特性。
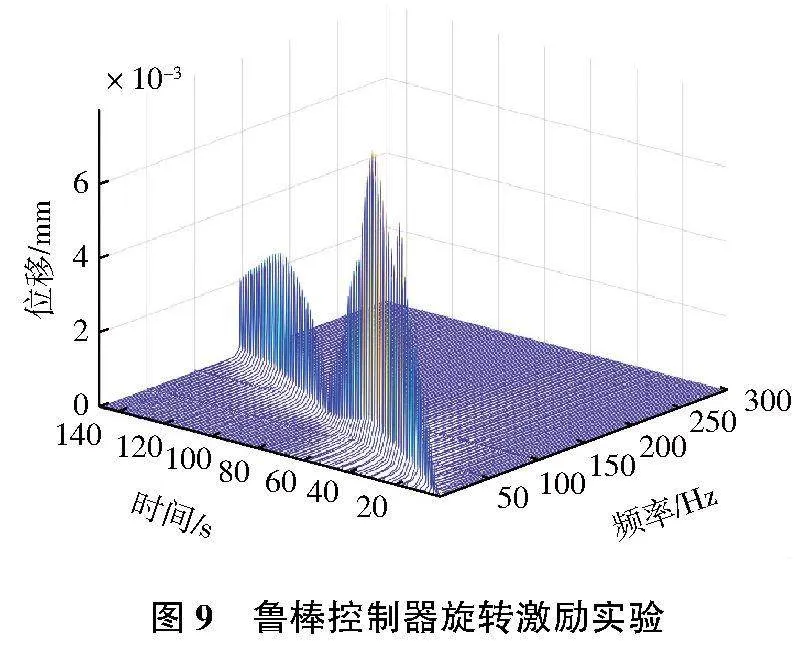
图9为磁悬浮轴承实验台添加1~150Hz一系列正弦激励的响应瀑布图。从图中可以看出,在转子系统刚体模态处,幅值出现了峰值,其振动幅值较小,体现了H∞鲁棒控制器对转子系统刚体模态的控制效果。
4 结语
本文基于正交多项式拟合原理对转子系统刚体模态及弯曲模态进行了系统频响辨识,建立了磁悬浮轴承系统被控模型,通过磁悬浮轴承扫频实验验证了通过拟合模型的准确性。随后基于混合灵敏度鲁棒控制器设计方法,对辨识的系统被控模型进行H∞鲁棒控制器设计。实验结果表明,基于系统辨识的鲁棒控制器应用于磁悬浮轴承系统中,具备较好的起浮特性及对刚体模态的控制效果,验证了基于模型辨识的鲁棒控制器设计的有效性及可行性。
参考文献:
[1] MUSHI S E, LIN Z L, PAUL E. Stability analysis for a flexible rotor on active magnetic bearings subject to aerodynamic loads [C]// Proceeding of the 12th International Symposium on Magnetic Bearings. [S.I.: s.n.]2010: 22-25.
[2] RAN S L,HU Y F,WU H C. Design,modeling,and robust control of the flexible rotor to pass the first bending critical speed with active magnetic bearing[J]. Advances in Mechanical Engineering,2018,10(2):168781401875753.
[3] VAZQUEZ J A,MASLEN E H,AHN H J,et al. Model identification of a rotor with magnetic bearings[J]. Journal of Engineering for Gas Turbines and Power,2003,125(1):149-155.
[4] 孙喆,赵晶晶,时振刚. 电磁轴承支承柔性转子模型测试与辨识[J]. 机械工程学报,2016,52(8):16-22.
[5] 傅志方,华宏星. 模态分析理论与应用[M]. 上海:上海交通大学出版社,2000.
[6] 陈颖,陈怀海. 一种二自由度系统物理参数识别方法[C]// 第十届全国振动理论及应用学术会议. 南京:中国振动工程学会,2011:207-213.
[7] 王彤,张令弥. 有理分式正交多项式频响函数模态参数识别[J]. 航空学报,2003,24(2):140-143.
[8] 周衡,金超武. 基于H∞和干扰观测器的磁悬浮轴承干扰抑制方法[J]. 机械制造与自动化,2022,51(3):149-151,158.
猜你喜欢
制造技术与机床(2019年9期)2019-09-10 07:36:30
自动化学报(2019年6期)2019-07-23 01:18:22
北京航空航天大学学报(2018年1期)2018-04-20 06:38:13
中国现代教育装备(2017年17期)2017-01-28 19:17:54
计算技术与自动化(2016年4期)2017-01-11 14:01:31
厦门理工学院学报(2016年1期)2016-12-01 04:50:41
北京航空航天大学学报(2016年7期)2016-11-16 01:51:01
中国科技博览(2016年26期)2016-10-24 18:17:55
系统工程与电子技术(2016年4期)2016-08-24 07:46:18
自动化学报(2016年3期)2016-08-23 12:02:52
