国外无人机空空打击作战典型样式及关键技术研究
2024-08-22 00:00:00高书亮段鹏飞田浩袁成
航空兵器 2024年3期
关键词:无人机





摘" 要:""""" 无人机在现代战争中正发挥着日益重要的作用。 本文针对国外无人机用于现代空空作战的研究进展、 典型作战样式及其关键技术进行了分析, 梳理分析了当前国外无人机用于空空打击作战的典型装备和技术发展现状, 结合当前国外无人机装备发展现状分析了无人机直接应用于空空打击作战的优势和劣势; 基于当前国外典型无人机平台性能特点, 提出了无人机参与空空打击作战的三类潜在典型应用样式; 针对无人机用于空空打击作战的实际需要, 分析了无人机应用于未来空空作战的关键支撑性技术。
关键词:""""" 无人机; 空空作战; 作战样式; 机载武器
中图分类号:""""" TJ760
文献标识码:""" A
文章编号:"""" 1673-5048(2024)03-0014-07
DOI: 10.12132/ISSN.1673-5048.2024.0073
引用格式: 高书亮, 段鹏飞, 田浩, 等. 国外无人机空空打击作战典型样式及关键技术研究[ J]. 航空兵器, 2024, 31( 3): 14-20.
Gao Shuliang, Duan Pengfei, Tian Hao, et al. Research on Typical Operation Modes and Key Technologies of Foreign UAV-Based Air to Air Striking[ J]. Aero Weaponry, 2024, 31( 3):" 14-20.( in Chinese)
0" 引" 言
空空打击作战是指空中作战平台以空空导弹等机载武器对敌方空中目标实施探测、 识别、 打击、 毁伤的作战活动。 随着战争样式的不断发展和演进, 空空打击正日益成为现代战争中的重要组成部分。 随着相关领域技术的快速发展, 无人机在现代空中作战中得到了日益广泛的应用。 尤其是近年来, 无人机技术发展迅猛, 任务领域不断扩展。 但从目前国外发展情况来看, 无人机还主要承担面向陆、 海面目标的精确打击任务, 尚未见到直接承担对空高动态目标打击的报道。 从相关领域研究情况来看, 国内外已经有较多学者开展了部分基于无人机的空战战术和技术研究, 文献[1]分析了现代空战体系的基本演变过程和趋势, 文献[2-4]分析了当前空战环境及美国等国家典型空战作战概念和体系近年来的发展变化, 文献[5-7]分析了当前无人机与有人机进行协同作战应用的典型样式。 从相关研究内容来看, 目前相关研究主要集中在无人机与有人机协同参与空空打击作战等方面, 针对无人机直接遂行对空打击任务研究相对较少。 相比于其他打击样式, 空空打击需要在高动态、 强对抗、 强干扰环境下实现对空中时敏目标的精确命中, 因此无人机应用于空空精确打击作战需要在其长航时、 低成本、 无伤亡等优势的基础上, 进一步增强其对复杂空战环境、 目标探测跟踪、 制导信息保障等方面的适应能力, 从而更好地满足空空打击作战要求。 本文针对无人机用于现代空空作战的可行性、 典型作战样式及其关键技术进行分析, 研究了当前国外无人机用于空空作战的装备和技术发展现状; 针对未来无人机直接参与空空作战的典型样式进行了分析, 提出了三类潜在作战应用样式; 针对无人机用于空空打击作战的实际需要, 从无人机平台、 配套机载武器及机载传感器等角度梳理了相应的能力需求, 分析了无人机应用于未来空空作战的关键支撑性技术。
1" 无人机空空精确打击作战发展现状
美军将无人系统看作是未来战术组成中不可缺少的部分。 根据美国国防部发布的最新版《无人系统综合路线图》, 无人机除了担负传统的情报/监视/侦察(ISR)等非火力打击任务之外, 将越来越多的担负精确火力打击任务[8]。 无人机平台遂行空空精确打击, 需要无人机平台、 配套载荷/武器、 战术战法等方面的多种支撑, 从目前国外发展情况来看, 在多种先进空战作战概念牵引下, 无人机遂行空空打击作战的相关装备和技术研究正在加速推进, 取得了一定进展。
收稿日期: 2024-05-06
*作者简介:" 高书亮(1982-), 男, 陕西汉中人, 高级工程师, 博士。
1.1" 具备空空打击能力的无人机平台不断出现
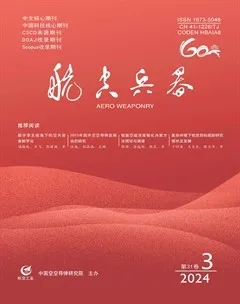
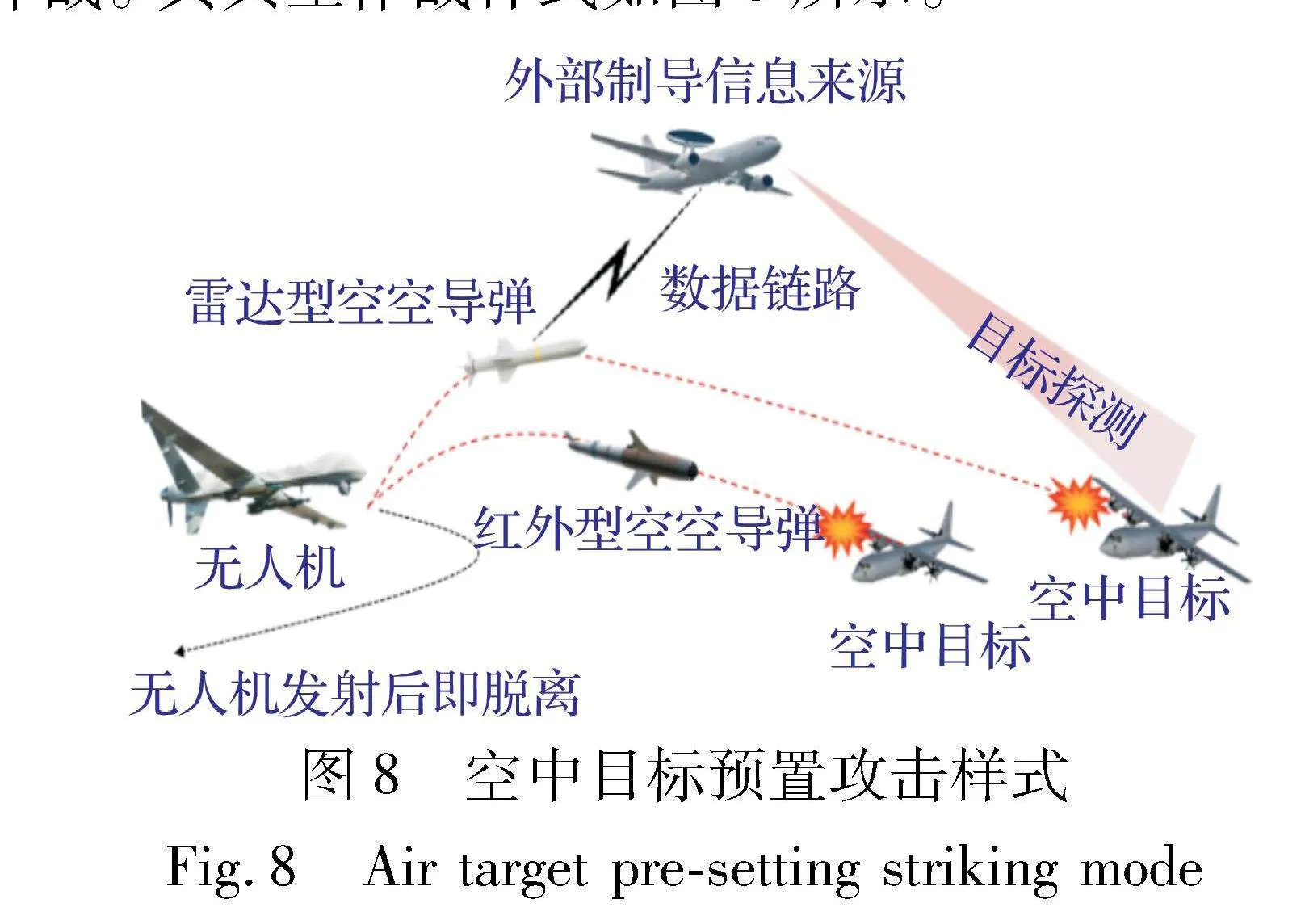
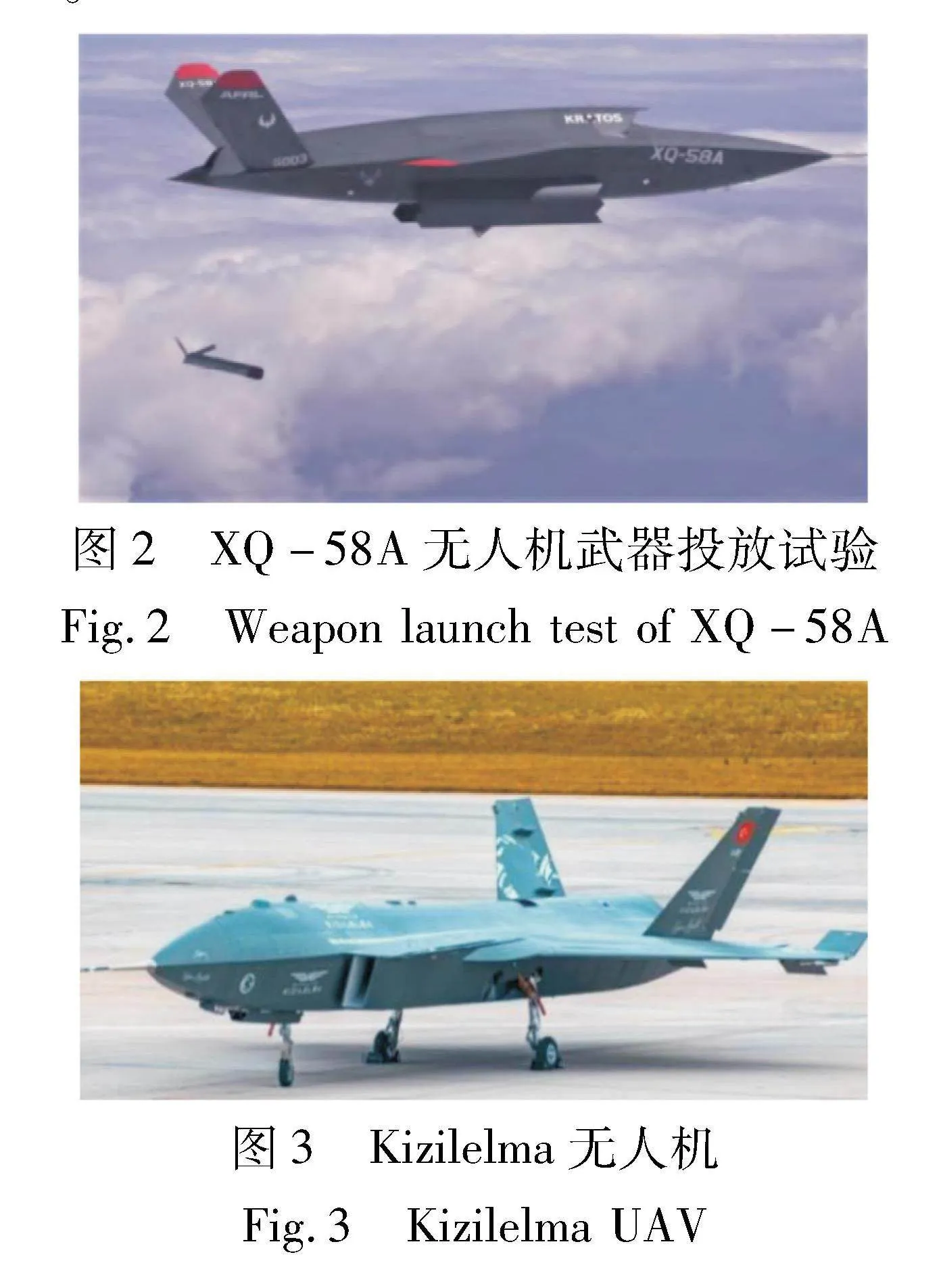
随着无人机技术的快速进步," 国外可遂行空空打击的无人机平台种类和数量正逐步增多," 关键性能水平正快速提升。 从目前国外发展情况来看, 遂行空空作战无人机平台主要包括现有察打一体无人机的改进升级和专门研制新型无人机平台两类情况。 针对第一类情况, 美国等国家正在探索和改进当前其在研在役无人机型号的空空武器携带能力, 不断开展相应的专门试验, 如美军就曾经利用MQ-9无人机进行改装, 并于2020年成功完成了AIM-9X红外型空空导弹的发射攻击试验。 由于当前常见的察打一体无人机在设计之初未考虑空战所需的快速占位、 机动规避、 持续目标跟踪与制导链路保障等要求, 一般不配备远距离对空动目标传感器载荷, 因此往往只能携带红外型空空导弹, 使得其攻击目标范围、 类型, 攻击距离、 打击灵活性等性能都受到较大限制; 第二类情况的典型代表是美国等国家正在研制的一系列新型无人机平台项目, 其中较为典型的包括:" (1)“远射”项目。 该项目由美国国防高级研究计划局(DARPA)主导, 旨在研究、 开发和验证一款可以携带和发射空空导弹的无人机平台, 该无人机可使用有人机平台运载投放, 以显著扩大攻击范围, 提升应对空中威胁的作战效率, 目前已经进入到全尺寸演示样机试验验证阶段, 极有可能在2~3年内实现初步列装。 从目前DARPA公布的研究进展来看, 每架“远射”无人机可装载至少两枚低成本空空导弹, 形成一架有人战机指挥数架“远射”无人机, 实现多个方向、 不同类型威胁目标的蜂群战和弹群战, 已初步具备典型的无人空中攻击能力[9-10], 如图1所示。 (2)“忠诚僚机”项目。 针对未来空中协同作战需求, 美国正在加快协同式空战平台的研究及忠诚僚机系列项目, 典型代表是美国空军研究实验室(AFRL)联合克拉托斯公司开发的XQ-58A 无人战斗机(如图2所示), XQ-58A长8.8 m, 翼展6.7 m, 采用单发、 隐身设计, 最高飞行速度1 050 km/h, 最大航程4 000 km, 实用升限13 715 m[11], 与目前常见无人机不同, 其首次采用了内置弹仓设计, 能够兼容AIM-120 和GBU-39 等弹药, 具备了携带空空武器与长机平台协同作战参与空空作战的基本能力, 目前已经完成了初步的空中开舱弹药投射试验。 (3)专用型制空作战无人机。 近年来, 土耳其等国家正在积极开展制空作战无人机的相关研制工作并取得初步进展。 2023年4月, 土耳其拜卡技术公司研制的Kizilelma无人机(如图3所示)与Akinc察打一体无人机进行了首次编队飞行, 该无人机在最大飞行高度12 000 m, 飞行马赫数0.9的情况下可持续飞行5 h, 能够搭载土耳其研制的“波兹多安”(Bozdogan)和“游隼”(Gokdogan)空空导弹[12]。
1.2" 智能化空战博弈对抗技术快速发展
随着人工智能技术与现代空战的不断结合, 为高动态、 不确定、 不完备信息条件下的空战博弈问题带来了新的解决途径。 智能空战相关领域技术的快速发展, 使得能够采用无人化、 智能化空战决策机制和平台指挥无人机开展复杂环境下空中作战, 为开展复杂的制空精确打击带来了天然的优势。 当前, 无人机正日益成为国外人工智能空战的天然试验和验证平台, 并且随着无人机技术的不断发展, 无人机+人工智能的模式正在现代空战中逐步呈现出不断增强的作战效能。 2020年8月, 在DARPA举办的“Alpha Dogfight trial”人机对抗赛中, 美国苍鹭公司设计的智能飞行自主决策系统驾驶F-16战机以5:0的优势战胜了F-16的飞行教官; 美国空军研究实验室战略发展规划和实验办公室(SPDE)推动的“天空博格人”项目采用多种无人机平台开展搭载验证, 先后成功在克拉托斯公司的UTAP-22无人机(如图4所示)及MQ-20“复仇者”无人机(如图5所示)等平台上实现了搭载首飞。 2020年12月, XQ-58A 实现与F-22、 F-35A和F-35B 等有人战机协同半自主编队飞行; 同
月, 美国空军的ARTU无人U-2项目表明了无人系统
的操作权首次超过人类飞行员, 展现出自主化空中作
战的趋势。" 在智能化作战算法和引擎的支持下," 无人机
平台可以在无人工干预或少人工干预的情况下, 自主完成信息获取、 态势感知、 任务规划和作战决策, 从而自主遂行防空压制、 对面突击、 情报监视侦察等多种任务, 对于复杂空战环境和任务的适应能力正在不断增强[13]。
1.3" 新型微小型化机载制空导弹不断涌现
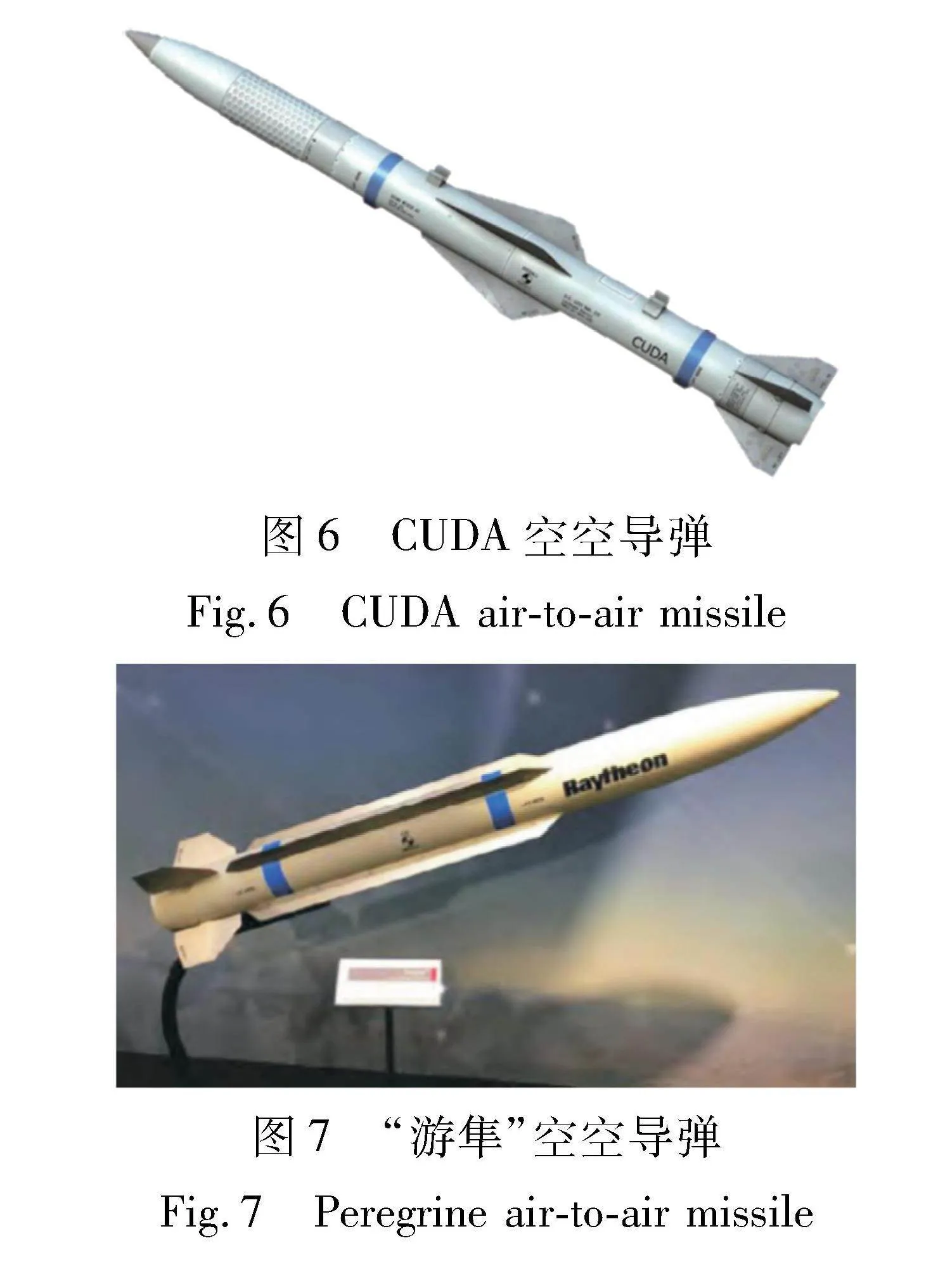
空空导弹是实施空空打击作战的直接手段。 当前, 一批新概念空空导弹正不断出现, 这些导弹往往具有体积小、 重量轻、 使用灵活等特点, 能够满足无人机平台的搭载需要[14]。 这些新型空空导弹通常为紧凑型气动外形, 采用高集成度相控阵导引头、 一体化制导控制计算机、 高性能固体火箭发动机、 直接力姿态控制等新型技术, 具有全天候、 高装载、 小型、 快速、 轻量级的特点, 可应对无人机、 有人机和巡航导弹等多种目标威胁[15]。 其中, 美国披露的下一代小型先进能力导弹(如图6所示)弹长仅为1.8 m; 雷神公司展示的“游隼”新型中距空空导弹(如图7所示)的尺寸仅有美国当前主战空空导弹(AIM-120)的一半, 但可将AIM-120 导弹的射程与导弹的格斗机动性相结合, 其典型条件下攻击距离不低于100 km, 具有极强的机动性, 同时显著提升现有飞机挂载密度。 由于小型、 微型化空空导弹相比于传统主战空空导弹在体积、 重量、 发射条件等方面都有明显的减小, 更加适合在当前无人机平台上挂载使用[16-17]。
2" 无人机遂行空空打击作战的主要优劣势分析
2.1" 优势分析
一是全天候长航时留空能力带来的作战持久性优势。 传统战斗机平台受制于其燃油携带量, 使得其巡航时间相对较短, 而无人机普遍采用高升阻比气动外形和大容量燃油装载, 同时无需考虑飞行机组的生理承受能力, 因此其留空时间普遍高于有人机。 MQ-9A察打一体无人机最长留空时间达到了27 h, MQ-20“复仇者”无人机最长留空时间达到了20 h, 这是目前有人战斗机难以达到的。
二是无人员伤亡带来的作战灵活性优势。 由于无人机没有飞行机组, 因此空战过程中无需考虑己方人员伤亡问题, 可以遂行多种飞行航迹和接敌路径, 对于突然加速、 变高、 大机动过载转弯等空战样式和动作的承受能力更强。
三是更强的隐身能力带来的作战突然性优势。 由于不需要飞行员座舱等部位, 高端无人机平台往往可以更加自由的开展隐身设计, 同时由于无人机体积相比于大型战斗机而言普遍偏小, 因此同等情况下具有更小的RCS特征, 这就使得其具有更加优秀的隐蔽接敌并突然发动攻击的能力。 当前, 美军多型无人机机身大量采用复合材料, 雷达反射截面积小, 隐身性能大幅提高。 以RQ-180隐身侦察无人机为例, 其机身采用飞翼布局, 后缘构型简洁, 蒙皮覆盖新型隐身材料, 使得其隐身性能进一步提升。
2.2" 劣势分析
一是整体飞行性能相对不足。 当前主要军用无人机出于续航和隐身双重考虑, 大多采用大展弦比固定翼和飞翼布局, 导致机身阻力相对偏大, 在动力装置性能无明显提升的情况下, 机动性能不足, 面向空战占位抢占能力相对不足, 有研究表明, 美国忠诚僚机XQ-58A稳定盘旋过载仅1.693g, 明显低于当前主流战斗机水平。 此外, 由于当前多数无人机飞行速度相对较低, 基本不具备稳定的超音速巡航能力, 发射空空导弹等武器的初始条件相对较差, 对提升武器射程、 速度等性能不利。
二是机载武器适配能力有待提高。 相比于有人主战飞机, 当前主流无人机的机腹、 翼下挂点数量相对偏少, 多数尚未采用内埋式弹舱等先进武器发射装置, 主要采用激光指示吊舱等作为目标跟踪指示传感器, 所挂载的机载弹药主要以空面武器为主[18], 对空空武器的兼容能力还有待提高。 同时, 由于大多数无人机尚未配备支持对空目标搜索跟踪的探测传感器(如火控雷达、 红外搜索跟踪传感器等), 因此很难为机载制空武器提供复合制导所需的全程信息保障, 难以闭合对空打击环路。
三是复杂电磁环境适应能力有待提高。 当前无人机自主决策程度相对偏低, 遂行复杂作战任务往往需要有人机、 地面任务指控站等多种手段进行外部作战指挥, 因此大量依赖复杂数据通信链路。 在复杂电磁环境中作战时, 一旦被敌方干扰、 截获甚至接管通信链路, 很有可能造成无人机作战失控, 在复杂电磁环境下的对空作战能力的鲁棒性尚有待观察。
3" 无人机空空打击作战典型样式
3.1" 预置空中目标攻击
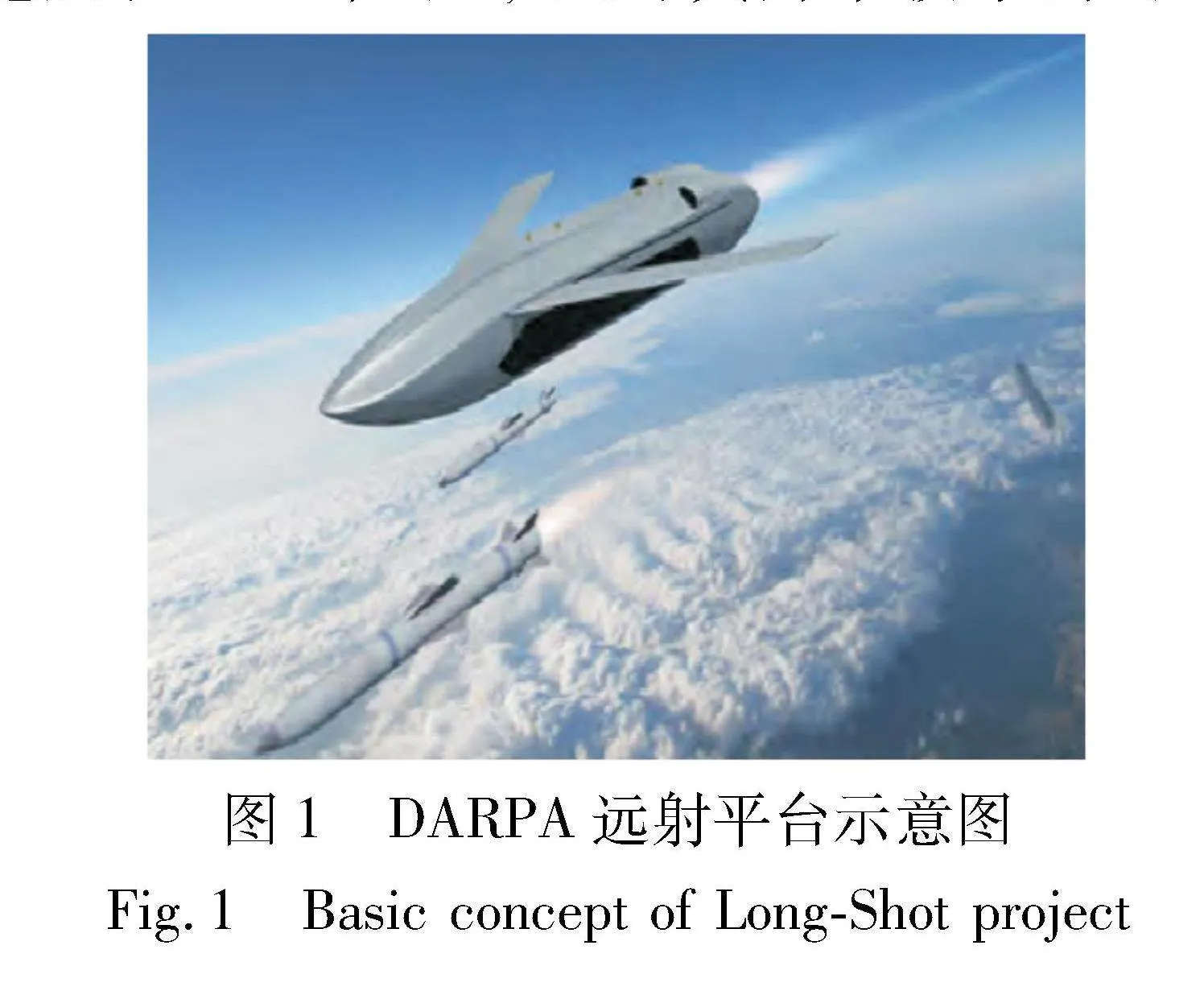
以美国MQ-9察打一体无人机为例, 在此样式下, 无人机可根据地面或空中指挥平台提供的预置攻击指令和目标参数, 携带空空导弹武器对对手的加油机、 运输机等大型空中目标进行攻击。 这种样式一般出现在低烈度空战区域或无人机使用方已经基本夺取制空权的情况下, 由于攻击目标飞行速度慢、 逃逸能力差、 目标特性显著, 一旦被战斗机、 预警机或地面雷达发现很难快速逃离所在空域, 因此可采用快速预置目标参数的方式引导无人机前往攻击。 在此情况下, 无人机仅作为空空导弹发射平台, 空空导弹可采用发射前自主目标截获或依靠预警机等外部传感器提供中制导, 无人机无需为空空导弹提供任何中制导信息, 可实现发射后立即脱离, 仅需要具备针对空空导弹的挂载、 加电、 初始目标装订和发射等能力即可, 也无需配备主动雷达等复杂探测制导设备, 现有大型察打一体无人机经简单改装后即可完成此类作战。 其典型作战样式如图8所示。
3.2" 外部指挥引导下的半自主攻击
以美国忠诚僚机XQ-58A为例, 在此样式下, 无人机可在邻近有人机的概略引导下, 前往敌方空中目标所在空域, 随即凭借自身携带的雷达、 光电/红外、 ESM等传感器搜索发现敌方目标, 自主完成目标截获、 威胁判别和目标航迹跟踪生成后, 经邻近有人机或地面指挥中心许可并下达攻击作战指令后, 发射所携带的空空导弹, 并为空空导弹提供全程中制导信息, 直至导弹导引头开机并截获敌方目标。 此类样式下, 一般攻击距离相对预置空中目标攻击样式更远, 往往需要使用具有更远射程的雷达型空空导弹, 同时无人机需配置雷达、 光电/红外、 ESM等传感器, 以便在较大范围内搜索探测并跟踪空中目标, 同时具备双向数据链路发射接收能力, 从而确保为导弹提供全程制导。 其典型作战样式如图9所示。
3.3" 无人机全自主空空攻击
以美国忠诚僚机XQ-28A为例, 在此样式下, 无人
机可在有人机或地面指挥中心装订的作战任务指引
下, 自主完成飞行路径规划, 前往任务空域完成攻击占位, 利用自身携带的机载传感器发现敌方空中目标, 完成目标航迹跟踪、 威胁研判并完成自主攻击决策, 在此
基础上," 发射空空导弹并提供全程制导," 确保命中敌方
目标。 在此样式下, 无人机有效攻击距离和攻击覆盖范围最大, 整个过程除开始阶段需要外部指控平台(有人机或地面指挥中心)下达作战任务外, 全程不需外部干预, 无人机平台自主完成对空打击的OODA杀伤链全闭环过程, 可搭配雷达、 红外等多种不同类型空空导弹, 可视敌方目标情况灵活开展单次、 多次攻击, 即能够攻击中高空的战斗机、 大型飞机等目标[19], 也能够攻击中低空的无人机、 直升机、 巡航导弹等目标, 作战使用和武器选择最为灵活, 但对无人机平台的自主探测、 任务规划、 信息融合、 武器挂载等相关能力提出了更高的要求。 其典型作战样式如图10所示。
4" 无人机空空打击作战的关键技术
着眼当前国外技术发展趋势, 为了有效支撑无人机平台执行空空打击作战任务, 必须在如下关键技术领域实现突破。
4.1" 空战无人平台总体设计与优化技术
空空打击作战对于空战平台提出了较为特殊的性能需求, 如强隐身能力、 大航时\航程能力、 高机动飞行能力、 目标探测跟踪能力和大容量武器\传感器携带能力等。 当前, 国外空战无人平台总体思路主要包括两类:" 一是“无人机+”, 即在现有无人机平台上加改装部分空空武器和传感器。 由于目前国外大多数主流大型无人机平台均面向ISR任务和低强度对抗下的空对面火力支援任务设计, 其机动飞行性能、 隐身性能和武器挂载性能均无法和有人战斗机相比, 因此这种模式往往仅能支撑低烈度情况下的有限空战目标, 很难适应高强度空空作战需要; 二是“+无人机”, 即为满足高强度空空作战需要, 全新设计专用无人机平台。 从目前美国DARPA“远射”项目和通用原子公司的“Gambit”项目等经验来看, 主要采用新型翼身融合气动布局、 高性能涡扇发动机、 内埋进气道、 大容量内置式弹仓、 全向宽频隐身、 综合模块化航电等先进设计技术, 全面提升空战无人机平台的飞行性能、 隐身性能、 传感器综合应用性能及武器挂载能力, 更好地满足空空作战的需要。 需要指出的是, 由于不受驾驶人员的生理承受能力限制, 无人机在提升隐身性能, 进而增加隐蔽接敌并发起突然对空精确打击等方面具有天然的优势, 美国XQ-58A无人机采用了表面斜置、 背负式进气道和V型尾翼等隐身设计, 具有良好的隐身性能, 其综合隐身水平极有可能与F-22/F-35等隐身战机在同一量级。 MQ-25A无人机也通过背负式进气道、 倾斜的 V 形垂尾、 二维尾喷口等设计来降低雷达和红外的可探测性, 可借此优势前往高烈度战场边缘执行加油、 攻击等作战任务。
4.2" 面向无人平台约束的先进机载传感器技术
机载传感器是无人机独立完成目标探测、 跟踪、 识别和制导的核心手段, 在执行空空打击任务过程中具有重要作用。 当前, 国外主流无人机平台尚未配置包括机载火控雷达等在内的机载传感器, 对空中高动态目标的自主搜索和跟踪识别能力相对较弱。 随着机载传感器领域的快速发展, 面向无人机装机约束的新型机载传感器将不断涌现。 以机载火控雷达为例, 该领域正初步呈现出宽角域全向探测、 宽频段超隐身、 射频隐身、 抗干扰等新的发展趋势和需求[20-21]。 以美国雷神公司最新推出的APG-79(V)4机载火控雷达为例(如图11所示), 该型雷达采用最新氮化镓(GaN)射频收发组件及全新的射频封装技术, 核心设备总重量约45 kg, 其重量和尺寸仅相当于当前主流有源相控阵火控雷达的三分之一, 成本仅相当于后者的二分之一, 具有结构重量轻、 体积尺寸小、 安装维护简单等特点, 当前已经启动了为美国海军陆战队F/A-18进行换装的工作, 已经基本具备了安装在无人机平台的可能。 如国外无人机平台能够可靠的加装和使用此类火控雷达, 将具备完整的自主对空目标搜索、 跟踪和识别能力, 其对空打击性能会得到显著提升。
4.3" 低成本小型化先进机载武器技术
能够挂载、 发射和制导空空导弹是无人机完成空空打击任务的关键因素。 受制于当前主流无人机平台在武器挂载和发射条件等方面的局限, 高密度、 小型化空空导弹极有可能是今后一个时期无人机空空武器的重要发展方向。 随着战术导弹武器小型化技术的不断进步, 先进小型化空空导弹正在逐步走向实用阶段。 美国空军正在研发“小型先进能力导弹”(SACM) , 计划将其用于穿透型制空项目发展出的未来战斗机上, 该型导弹计划采用经济可承受导引头、 超敏捷弹体、 高比冲推进和抗干扰制导引信等一体化技术, 可在不影响PCA 平台隐身情况下增加战斗机内埋弹舱的载弹量和增强战斗机的作战能力。 多种类型先进空空导弹的不断出现, 有望进一步提升无人机的空中打击密度和精度[22]。 此外, 随着低成本设计技术的不断引入, 以数字迭代为主、 辅以样机试验验证的基于模型的系统工程方法成为导弹低成本设计体系构建的重要手段。 通过对需求的细致分解, 以模块化、 模型化、 组合化为核心, 在虚拟空间中快速迭代可行方案, 缩短研发周期、 提升设计质量、 降低产品全寿命周期的成本, 适应规模化需求的空空导弹设计需要。 低成本、 小型化机载武器技术的不断进步, 为无人机尽可能高密度的携带和发射使用先进机载武器, 扩充火力打击密度和效率提供了更多可能。
4.4" 自主在线决策与任务规划能力
无人机空空作战的最终目标是实现无人机在无外界人为因素干预下, 成功、 可靠、 安全的完成对空打击过程。 相比于有人机空战, 无人机平台必须具备“人不在环”条件下的自主在线决策与任务规划能力, 所涉及的关键技术主要包括:" (1)多传感器智能信息融合技术。 其能够将深度学习等多种先进人工智能方法引入机载信息处理回路, 能够更加高效、 完整的实现多种机载传感器的信息处理、 航迹跟踪、 目标识别等功能, 为作战决策提供更加完备、 精确的态势信息; (2)面向无人空战的自主战术生成技术。 针对无人机自主化、 高智能特点及空空打击作战的强对抗、 快节奏等需求, 无人作战飞机应能够根据空战态势及时抢占并保持有利位置, 寻机歼敌并保全自己。 为此, 与有人机空战类似, 需要在智能化空战决策平台和手段支撑下, 搭载自主机动决策方法或引擎, 对战术实施距离、 机动规避时机、 空战战术策略等进行精细化前置估计, 形成空战战术动作的自主在线推演与生成能力, 为开展无人空战奠定基础[23-25]; (3)实时智能化自主决策技术。 将现代复杂推理的自动化决策辅助技术与空空作战相结合, 进一步提升作战态势的感知效率, 并能够基于当前空战态势快速完成作战筹划和智能自主决策, 能够支撑无人机超视距空战下的主动攻击、 机动规避、 火力分配等行为指令的自主在线生成, 从而避免由于数据链路延迟等造成的“人不在回路”决策延迟, 从而有针对性的支撑无人机自主空战决策[26-27]; (4)高性能制导数据链路技术。 现代新型数据链路和通信网络的快速发展, 可以为无人机遂行空空作战提供更大的支持。 以LINK16\22\TTNT等为代表的新一代数据链路能够更加高效的实现空中节点的组网信息交换, 支持超视距、 大带宽数据传输, 具备一定的抗电子干扰能力。 当前美军一方面正积极对传统的导弹双向制导数据链技术进行大力升级, 以战斧4和5A巡航导弹为例, 逐步应用成熟的双向卫星数据链, 可使攻击控制器控制飞行中的导弹转向攻击其他或更重要的目标, 以期增强战术导弹的多目标打击适应能力[28]; 另一方面还正在发展适用于F-35、 F-22、 XQ-58A等隐身飞机的多功能先进数据链(MADL), 该数据链可实现隐身飞机之间的数据交互, 被截获概率较低, 可实现多作战域、 多任务伙伴之间的信息交互, 最大限度实现多域传感器的对接, 确保无人机实现更加高效的地空、 空空数据共享, 从而为遂行高实时的空空打击作战提供目标信息、 作战指令、 态势共享等多种信息辅助[29]。
5" 结" 束" 语
本文针对无人机用于现代空空作战的可行性、 典型作战样式及其关键技术进行分析, 研究了当前国外无人机用于空中对抗作战的装备和技术发展现状, 提出了相应的作战应用样式, 分析了无人机应用于未来空空作战的关键支撑性技术。 纵观当前无人机及相关技术领域的发展现状, 国外无人机装备直接投入空空打击作战还有一定的距离, 必须从无人机平台、 配套机载武器\传感器及相应的作战应用等方面解决很多问题, 进一步闭合包括探测、 跟踪、 制导、 攻击的完整打击链条。 随着相关领域技术的不断发展, 无人机应用于空空打击作战的条件和技术基础正在不断成熟, 国外在这一领域近年来不断取得了新的进展, 为此应持续关注这一领域的最新发展动向和未来趋势。
参考文献:
[1] 樊会涛, 闫俊. 空战体系的演变及发展趋势[J]. 航空学报, 2022, 43(10): 527397.
Fan Huitao, Yan Jun. Evolution and Development Trend of Air Combat System[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(10): 527397.(in Chinese)
[2] 杨伟. 关于未来战斗机发展的若干讨论[J]. 航空学报, 2020, 41(6): 524377.
Yang Wei. Development of Future Fighters[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(6): 524377.(in Chinese)
[3] 谢岚风, 陈军, 焦璐, 等. 未来空战全域火力场研究[J]. 航空学报, 2024, 45(5): 296-313.
Xie Lanfeng, Chen Jun, Jiao Lu, et al. All-Domain Fire Field in Future Air Combat[J]. Acta Aeronautica et Astronautica Sinica, 2024, 45(5): 296-313.(in Chinese)
[4] 王超磊, 樊会涛. 美军新型制空作战概念研究[J]. 航空兵器, 2022, 29(3): 8-13.
Wang Chaolei, Fan Huitao. Research on New Air Combat Concepts of US Military[J]. Aero Weaponry, 2022, 29(3): 8-13.(in Chinese)
[5] 张曼曼, 姜毅, 杨昌志, 等. 未来空战对抗环境及作战样式研究[J]. 空天防御, 2021, 4(3): 105-109.
Zhang Manman, Jiang Yi, Yang Changzhi, et al. Confrontation Environment and Combat Mode of Future Air Combat[J]. Air amp; Space Defense, 2021, 4(3): 105-109.(in Chinese)
[6] 郭正玉. 美国制空作战概念和能力的新发展[J]. 航空兵器, 2023, 30(4): 10-16.
Guo Zhengyu. New Development of US Air Warfare Concept and Capability[J]. Aero Weaponry, 2023, 30(4): 10-16.(in Chinese)
[7] 张路, 邵正途, 翁呈祥, 等. 美军有/无人机协同作战运用及关键技术研究[J]. 战术导弹技术, 2022(6): 128-137.
Zhang Lu, Shao Zhengtu, Weng Chengxiang, et al. Research on Application and Key Technologies of U.S. Forces Manned/Unmanned Aerial Vehicle Cooperative Combat[J]. Tactical Missile Technology, 2022(6): 128-137.(in Chinese)
[8] 李姝, 裘昌利, 栾爽, 等. 美军无人系统发展规划研究综述[J]. 无人系统技术, 2023, 6(6): 101-108.
Li Shu, Qiu Changli, Luan Shuang, et al. Review on Unmanned Systems Integrated Roadmap by DoD[J]. Unmanned Systems Technology, 2023, 6(6): 101-108.(in Chinese)
[9] 张蓬蓬, 张俊宝, 郭正玉. 远射项目发展及作战使用分析[J]. 飞航导弹, 2021(11): 42-45.
Zhang Pengpeng, Zhang Junbao, Guo Zhengyu. Analysis on the Development and Operational Use of Long-Range Shooting Projects[J]. Aerodynamic Missile Journal, 2021(11): 42-45.(in Chinese)
[10] 杨卫丽, 程鲤. 美国“远射” 项目对未来空战模式影响分析[J]. 战术导弹技术, 2023(1): 162-165.
Yang Weili, Cheng Li. Impact Analysis of LongShot Program of the U.S. on Air-Combat Mode in the Future[J]. Tactical Missile Technology, 2023(1): 162-165.(in Chinese)
[11] 卢元杰, 陈星伊. XQ-58A无人机总体方案分析[J]. 飞机设计, 2021, 41(3): 1-4.
Lu Yuanjie, Chen Xingyi. Analysis of the Overall Scheme of the XQ-58A UAV[J]. Aircraft Design, 2021, 41(3): 1-4.(in Chinese)
[12] 金钰, 谷全祥. 2023年国外军用无人机装备技术发展综述[J]. 战术导弹技术, 2024(1): 33-47.
Jin Yu, Gu Quanxiang. Overview of the Development of Foreign Military UAV Systems and Technology in 2023[J]. Tactical Missile Technology, 2024(1): 33-47.(in Chinese)
[13] 孙智孝, 杨晟琦, 朴海音, 等. 未来智能空战发展综述[J]. 航空学报, 2021, 42(8): 525799.
Sun Zhixiao, Yang Shengqi, Piao Haiyin, et al. A Survey of Air Combat Artificial Intelligence[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(8): 525799.(in Chinese)
[14] 任淼, 刘琪, 刘晶晶. 2019年国外空空导弹发展动态研究[J]. 航空兵器, 2020, 27(4): 17-24.
Ren Miao, Liu Qi, Liu Jingjing. Research on Foreign Air-to-Air Missiles’ Development in 2019[J]. Aero Weaponry, 2020, 27(4): 17-24.(in Chinese)
[15] 陈辛, 张俊宝, 史荣宗. 游隼空空导弹发展及作战分析[J]. 飞航导弹, 2021(12): 25-29.
Chen Xin, Zhang Junbao, Shi Rongzong. Development and Operational Analysis of Peregrine Falcon Air-to-Air Missile[J]. Aerodynamic Missile Journal, 2021(12): 25-29.(in Chinese)
[16] 史荣宗, 张俊宝. 小型先进能力导弹性能估算与分析[J]. 弹箭与制导学报, 2020, 40(6): 69-72.
Shi Rongzong, Zhang Junbao. Performance Estimation and Analysis of Small Advanced Capability Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40(6): 69-72.(in Chinese)
[17] 李斌, 刘琪, 徐琰珂. 美国未来空空导弹发展与能力[J]. 航空兵器, 2023, 30(2): 83-90.
Li Bin, Liu Qi, Xu Yanke. Development and Capability of American Air-to-Air Missile in the Future[J]. Aero Weaponry, 2023, 30(2): 83-90.(in Chinese)
[18] 任新联, 李刚. 美国无人机载空地导弹发展现状及趋势[J]. 飞航导弹, 2021(4): 59-62.
Ren Xinlian, Li Gang. Development Status and Trend of Unmanned Air-to-Ground Missiles in the United States[J]. Aerodynamic Missile Journal, 2021(4): 59-62.(in Chinese)
[19] 李望西, 王勇, 吴文超, 等. 面向空空作战的有人/无人机协同作战模式研究[J]. 无人系统技术, 2023, 6(4): 76-84.
Li Wangxi, Wang Yong, Wu Wenchao, et al. Research on Manned/Unmanned Air Vehicle Cooperative Combat Model for Air-to-Air Combat[J]. Unmanned Systems Technology, 2023, 6(4): 76-84.(in Chinese)
[20] 曹兰英, 董晔, 郭维娜. 机载火控雷达发展趋势探究[J]. 航空科学技术, 2021, 32(6): 1-8.
Cao Lanying, Dong Ye, Guo Weina. Development Trend Analysis of Airborne Fire-Control Radars[J]. Aeronautical Science amp; Technology, 2021, 32(6): 1-8.(in Chinese)
[21] 张雷, 方学立. 宽角域机载火控雷达发展浅析[J]. 现代雷达, 2019, 41(12): 17-20.
Zhang Lei, Fang Xueli. A Brief Analysis of Wide-Azimuth Airborne Fire-Control Radar Development[J]. Modern Radar, 2019, 41(12): 17-20.(in Chinese)
[22] 苑桂萍, 张绍芳. 美军穿透型制空概念及相关导弹武器发展[J]. 战术导弹技术, 2018(1): 37-41.
Yuan Guiping, Zhang Shaofang. Penetrating Counter Air Concept of USAF and Its Missile Weapon Development[J]. Tactical Missile Technology, 2018(1): 37-41.(in Chinese)
[23] 单圣哲, 杨孟超, 张伟伟, 等. 自主空战连续决策方法[J]. 航空工程进展, 2022, 13(5): 47-58.
Shan Shengzhe, Yang Mengchao, Zhang Weiwei, et al. Continuous Decision-Making Method for Autonomous Air Combat[J]." Advances in Aeronautical Science and Engineering, 2022, 13(5): 47-58.(in Chinese)
[24] 郭昊, 周德云, 张堃. 无人作战飞机空战自主机动决策研究[J]. 电光与控制, 2010, 17(8): 28-32.
Guo Hao, Zhou Deyun, Zhang Kun. Study on UCAV Autonomous Air Combat Maneuvering Decision-Making[J]. Electronics Optics amp; Control, 2010, 17(8): 28-32.(in Chinese)
[25] 李俊圣, 岳龙飞, 左家亮, 等. 基于深度强化学习的多无人机协同进攻作战智能规划[J]. 航空工程进展, 2022, 13(6): 40-49.
Li Junsheng, Yue Longfei, Zuo Jialiang, et al. Multi-UAV Cooperative Offensive Combat Intelligent Planning Based on Deep Reinforcement Learning[J]. Advances in Aeronautical Science and Engineering, 2022, 13(6): 40-49.(in Chinese)
[26] 陈希亮, 李清伟, 孙彧. 基于博弈对抗的空战智能决策关键技术[J]. 指挥信息系统与技术, 2021, 12(2): 1-6.
Chen Xiliang, Li Qingwei, Sun Yu. Key Technologies for Air Combat Intelligent Decision Based on Game Confrontation[J]. Command Information System and Technology, 2021, 12(2): 1-6.(in Chinese)
[27] 贾高伟, 王建峰. 无人机集群任务规划方法研究综述[J]. 系统工程与电子技术, 2021, 43(1): 99-111.
Jia Gaowei, Wang Jianfeng. Research Review of UAV Swarm Mission Planning Method[J]. Systems Engineering and Electronics, 2021, 43(1): 99-111.(in Chinese) .
[28] 董露, 李文胜. 美军战斧5巡航导弹发展及技术特点分析[J]. 飞航导弹, 2021(12): 116-121.
Dong Lu, Li Wensheng. Analysis on the Development and Technical Characteristics of Tomahawk 5 Cruise Missile of US Army[J]. Aerodynamic Missile Journal, 2021(12): 116-121.(in Chinese)
[29] 马慧敏. 空空导弹数据链仿真实现技术研究[J]. 弹箭与制导学报, 2012, 32(4): 77-79.
Ma Huimin. The Research on Data Link Simulation of Air-to-Air Missile[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2012, 32(4): 77-79.(in Chinese)
Research on Typical Operation Modes and Key Technologies of
Foreign UAV-Based Air to Air Striking
Gao Shuliang1, 2, 3*, Duan Pengfei1, 2, 3, Tian Hao1, 2, 3, Yuan Cheng1, 2, 3
(1. China Aeronautic Establishment, Beijing 100012, China;
2. Collaborative Innovation Center for Future Airborne Weapon Technology, AVIC, Beijing 100029, China;
3.China Airborne Missile Academy, Luoyang 471009, China)
Abstract: UAVs are playing an increasingly important role in modern warfare. This paper analyzes the research progress, typical operation modes and key technologies of foreign UAV used in modern air to air striking. Analyzed the current technological development status of UAVs used in air striking operations abroad, and combined with the current development status of UAV equipment abroad, analyzed the advantages and disadvantages of direct application of UAVs in air striking operations. Based on the performance characteristics of typical foreign UAV platforms, three potential typical application styles for UAV participation in air to air strike operations are proposed. In response to the practical needs of UAVs for air to air striking operations, this paper analyzes the key supporting technologies for the application of UAVs in future air to air striking.
Key words: unmanned air vehicle; air to air striking; operation mode; airborne weapons
猜你喜欢
电脑知识与技术(2016年28期)2016-12-21 12:21:32
电子技术与软件工程(2016年19期)2016-12-19 18:28:28
科技创新与应用(2016年33期)2016-12-17 13:31:31
新教育时代·教师版(2016年27期)2016-12-06 18:14:59
中国科技纵横(2016年17期)2016-11-30 11:51:57
农机使用与维修(2016年10期)2016-11-10 09:45:55
人间(2016年26期)2016-11-03 17:52:40
中国科技博览(2016年22期)2016-11-01 18:10:31
科技视界(2016年22期)2016-10-18 14:30:27
企业导报(2016年9期)2016-05-26 20:58:26