应用于水陆两栖潜水车的小型监控物镜研究
2024-08-12 00:00:00刘禹彤
科技资讯 2024年12期

摘 要:水路两栖潜水车是未来汽车发展的方向之一,是汽车技术进一步向高端应用拓展的技术补充。针对水路两栖潜水车对水下行驶过程超高清视频记录的需求,基于应用光学基本理论和Zemax光学设计软件,完成了以半球罩玻璃为视窗的小型水下定焦监控物镜设计,以适配微光监控相机。该系统光学总长度为58 mm,水下对角线视场角64゜;当奎奈斯特频率为120 lp/mm时,系统的MTF均大于0.3,畸变为6%。该镜头结构简单紧凑,成像质量高,同样适用于其他水下运动平台。
关键词:水陆两栖潜水车水下光学镜头光机结构设计视频监控
中图分类号:TB852.1
Research ona Small-Sized Monitoring Objective Lens for Amphibious Submarine Vehicles
LIU Yutong
University of Sanya, Sanya, Hainan Province, 572000 China
Abstract:A amphibious underwater vehicleis one of the directions for the future development of automobiles and a technological supplement for the further development of automotive technology to high-end application. In order to meet the demandof amphibious underwater vehicles for the ultra-high definition video recording of their underwater driving, based on the basic theory of applied optics and Zemax optical design software, a small-sized underwater fixed-focus monitoring objective lens with hemispherical cover glass as the window is designed to adapt to a low-light monitoring camera. The total optical length of the system is 58mm, and its underwater diagonal field of view is 64゜. When Quineste frequency is 120lp/mm, the MTF of the system is greater than 0.3, and its distortion is 6%. This lens has a simple and compact structure and high imaging quality, and it is also suitable for other underwater motion platforms.
Key Words:Amphibious submersible vehicle; Underwater optical len; Optical-mechanical structure design; Video surveillance
随着汽车行业的不断发展,水陆两栖潜水车逐渐走入人们的视野,并大大刺激了汽车在高端定制、水下探险等方面的需求。水下摄影技术是进行水下探险的基本手段。由于介质的改变,将空气中的光学系统经过简单防水密封后放在水下,会遇到像质恶化、视场角损失等问题。对此,孙传东等人[1]介绍了几种改装方法,但并不能彻底地消除上述影响。为了解决这一难题,人们设计了水下专用摄影物镜,这类镜头从设计之初就综合考虑了水介质的影响,但视场角较小、体积较大,不能很好地集成在有限空间内。例如:孙传东设计的水下摄像镜头视场角仅为40°;翟学锋[2]设计的水下镜头最大视场角仅为30°,总长达到了110 mm。与国外Deepsea公司、Kongsberg公司等水下商用相机产品差距较大。国内多家单位均致力于水下成像装备开发,但相关产品均采用直接封装普通相机的技术手段,且用平板玻璃作为耐压窗口,这就导致了水下相机视场角较空气中视场角大幅减小,同时也未考虑海水引入的光学像差。同时,目前常见的国内外水下相机体积均比较大,不适合集成到水栖两用汽车中[3-5]。
针对上述问题,本文基于Zemax完成了一种小型化水下物镜设计,明确了设计指标,结合光学设计和光机结构设计,阐述了一种水下小型监控物镜的设计方法。
1 光在水中的传播特性
水下光学镜头的成像质量受到两方面因素的影响:一是水体的吸收散射;二是工作介质、光学窗口改变引入的像差。
根据比尔-朗伯定律,光在衰减介质水中传播距离z时,其辐照度的指数衰减特性如下:
Iz=I0e-kz(1)
式(1)中:k是总衰减系数,为散射衰减系数s和吸收衰减系数a之和。不同水域水体的衰减并不相同,一般情况下港口、近海、湖泊、河流水体的悬浮粒子浓度较高,对光的衰减很大[6-9],对水下相机的成像分辨率有大幅恶化。
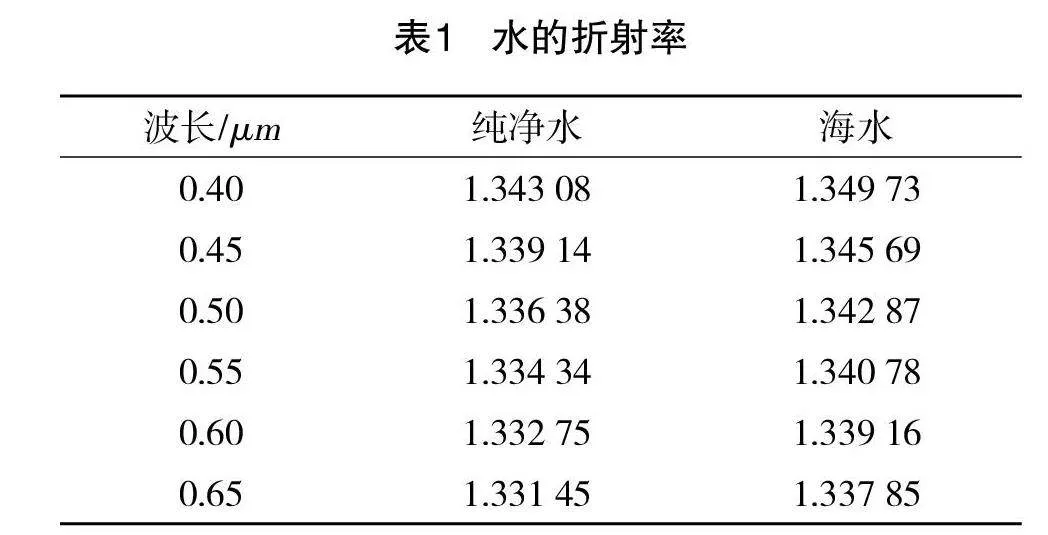
与在空气中的相机不同,水下相机的工作介质由空气变为水,其折射率发生较大变化,利用Schott公式计算折射率,并通过最小二乘法拟合得到纯净水和海水色散系数可得出如下折射率表[10](见表1)。
通常情况下,将空气中的相机封装在平板玻璃的水密耐压舱后,其水下成像质量并不会明显恶化,但会使水下视场角大幅降低。采用球罩玻璃封装会保证较大水下视场角,但是会引入十分明显的畸变。水下相机的成像分辨率与光学镜头和图像传感器像元数量、大小有关[11]。根据奈奎斯特采样定律,单个图像传感器的细节分辨能力为,
〖MTF〗_detect (u_i)=(sin(π〖∙d〗_pixel∙u_i))/(π〖∙d〗_pixel∙u_i )(2)
式(2)中:dpixel为像元尺寸;ui为空间频率;图像传感器截止频率为1/(2dpixel)。整个相机的成像分辨率为:
1/N=1/Nlens+1/Ndetect (3)
式(3)中:Nlens表示光学镜头分辨率, Ndetect为图像传感器分辨率,单位均为lp/mm。
2水下物镜的设计
2.1 设计指标
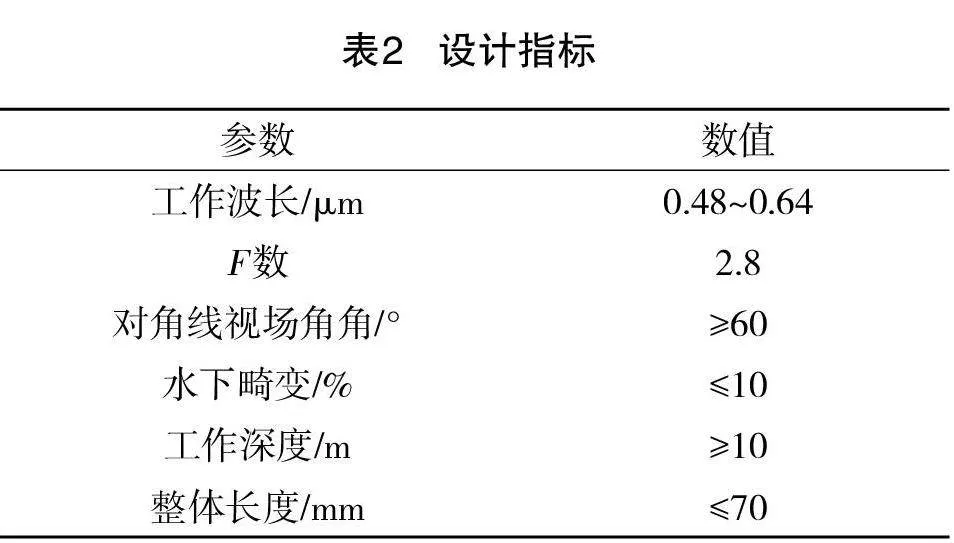
水陆两栖潜水车往往在近岸十米以浅的水域进行下潜,受人为因素影响,该处水域浮游植物、矿物质等悬浮粒子浓度较高,水中能见度较小,导致光在水中传输时面临巨大的吸收和散射。为了较清晰成像,需要采用高灵敏度CMOS成像传感器,型号为1/8英寸的SONY IMX334,分辨率为3840×2160,对角线尺寸为 8.86 mm,单个像元尺寸为2 μm,镜头的具体设计指标如表2所示。
2.2光学设计
考虑到水下视场角和水陆两栖潜水车的行驶环境,选用耐高温、耐高压、耐腐蚀,莫氏硬度为9的人造蓝宝石玻璃作为前端水密耐压窗口。蓝宝石相比其他玻璃材料,在具有200~5 500 nm的光谱透过性能外,经常被用于各类装备的保护视窗,可以有效避免陆地行驶时的沙尘和水下悬浮颗粒对镜头的磨损。
镜头的光学结构设计如图2所示。
所设计的为定焦光学镜头,其中图2(a)中第1个镜片为内径62 mm的人造蓝宝石窗口,人造蓝宝石按照250 MPa的屈服强度核算,可以承受水下10 m工作深度的水压;该窗口与水陆两栖潜水车外壳集成为一体,采用低成本NBR70的丁腈密封圈进行密封,丁腈橡胶是由丙烯腈与丁二烯单体聚合而成的共聚物,耐磨性较高,耐热性较好。
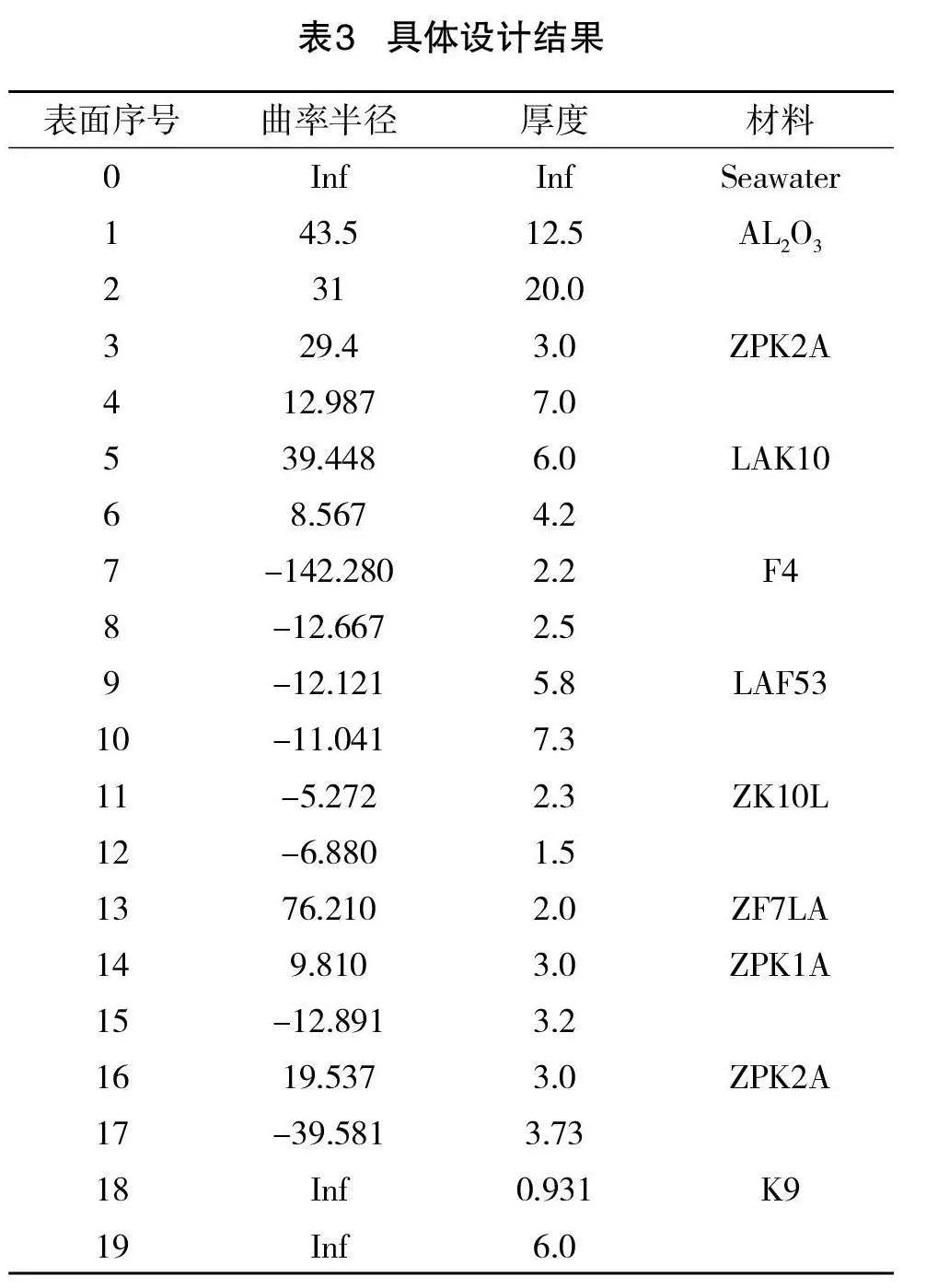
为了降低生产制造成本,所有镜片均为球面镜。第2、3、4、5、6材料依次为ZPK2A、LAK10、F4、LAF53、ZK10L,第7片为ZF7LA和ZPK1A的双胶合透镜,第8片为ZPK2A,第9片为材质K9玻璃的保护视窗。保护视场角与后焦面,即图像传感器的距离为6 mm。具体设计结果如表3所示。
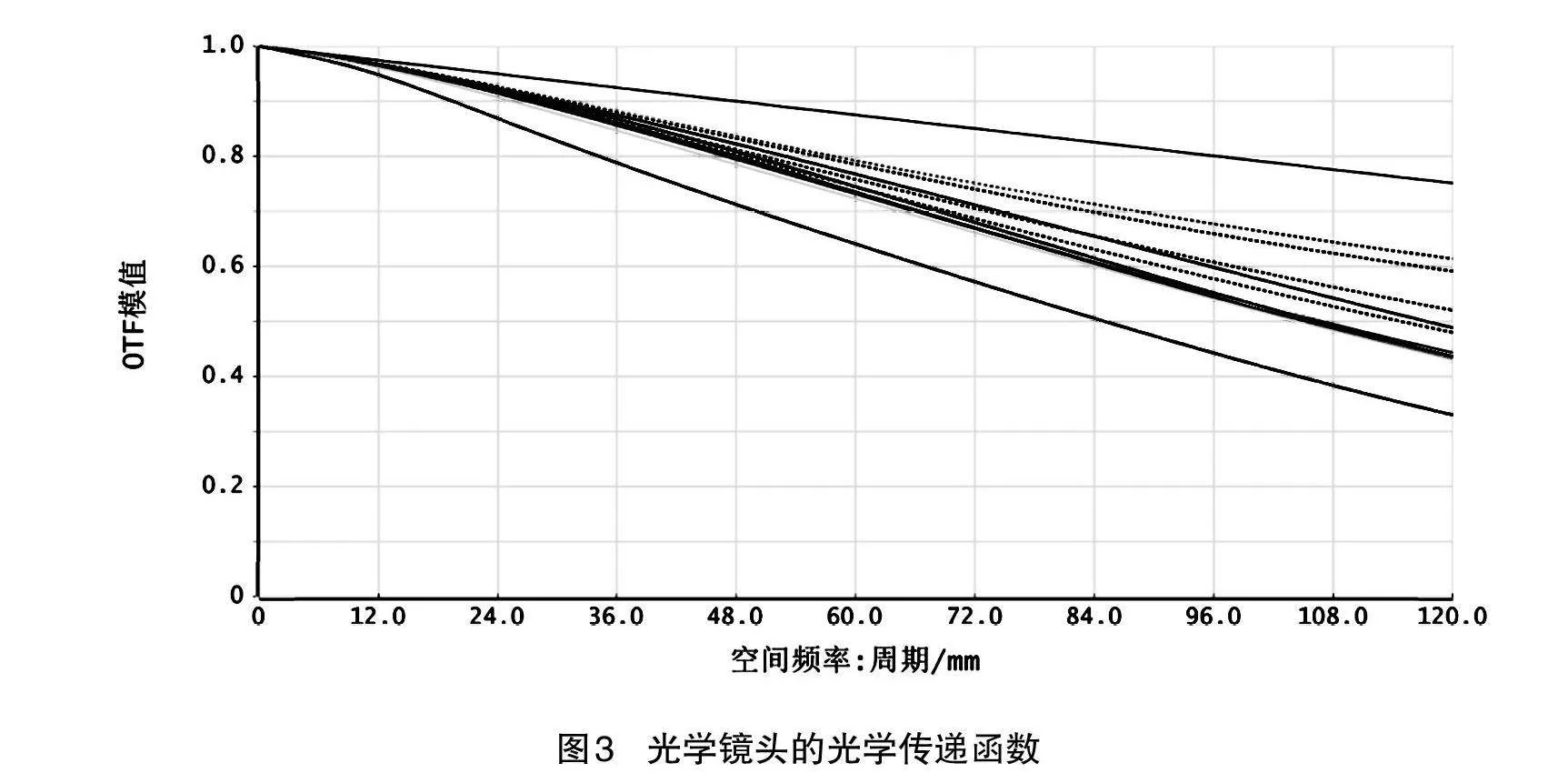
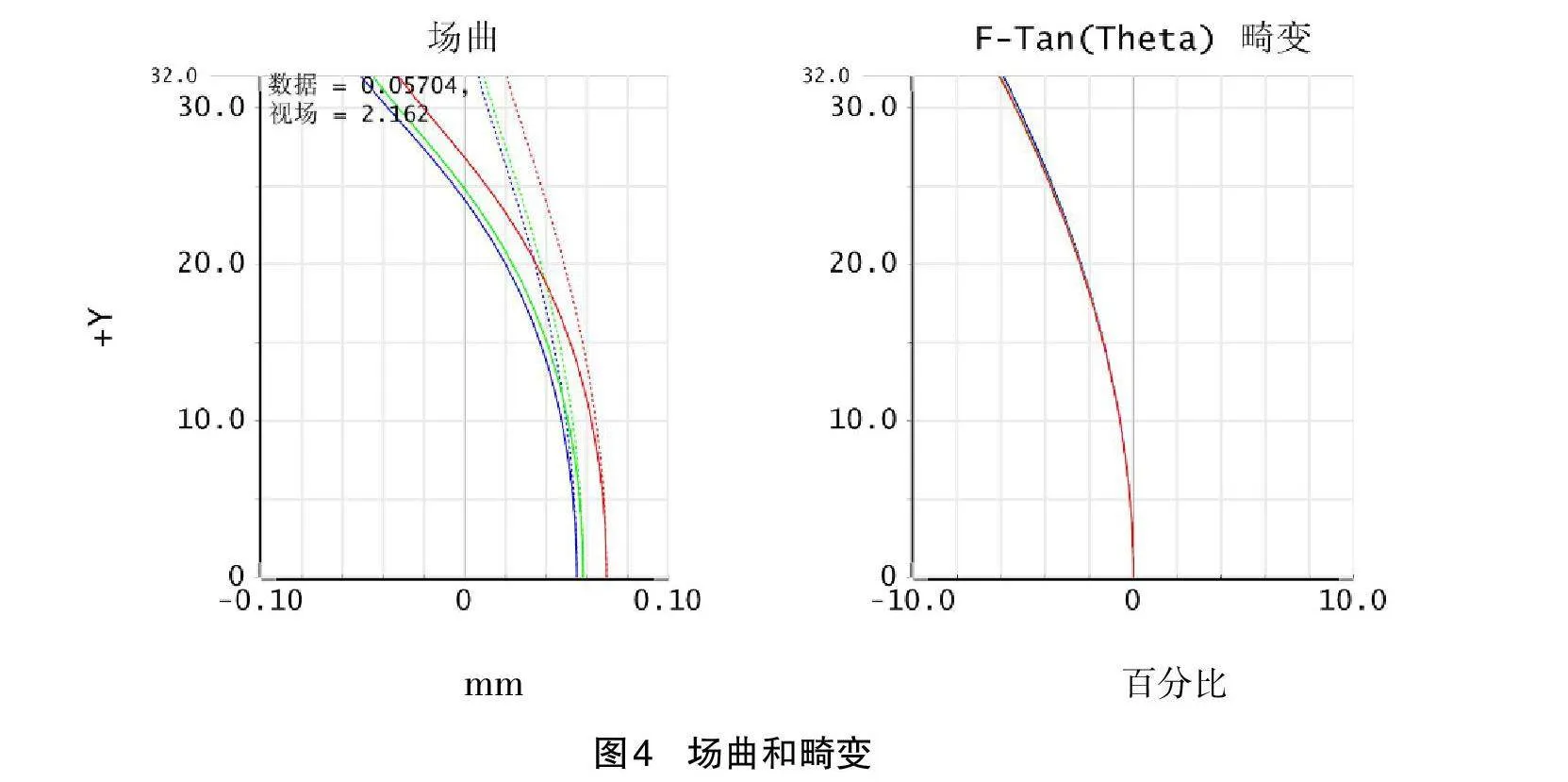
如前文所述,光学传递函数是一个空间不变线性系统的成像性质,可用物、像平面上不同频率的余弦分布的振幅比和相位差来表示。在Zemax光学设计中,用传递函数曲线的高频部分表征设计结果的细节分辨能力。图3为光学镜头的传递函数,如图所示该镜头的各位置奎奈斯特频率120 lp/mm均大于0.3,且各视场角曲线重合度较高,可确保成像质量均匀。图4为镜头场曲和畸变设计结果,可见光学镜头的畸变控制在6%左右,该畸变人眼较难分辨。
根据光学系统设计经验,设计结果满足清晰成像要求。不包含人造蓝宝石玻璃,该光学镜头总长58 mm,对角线视场角64°,满足设计指标。
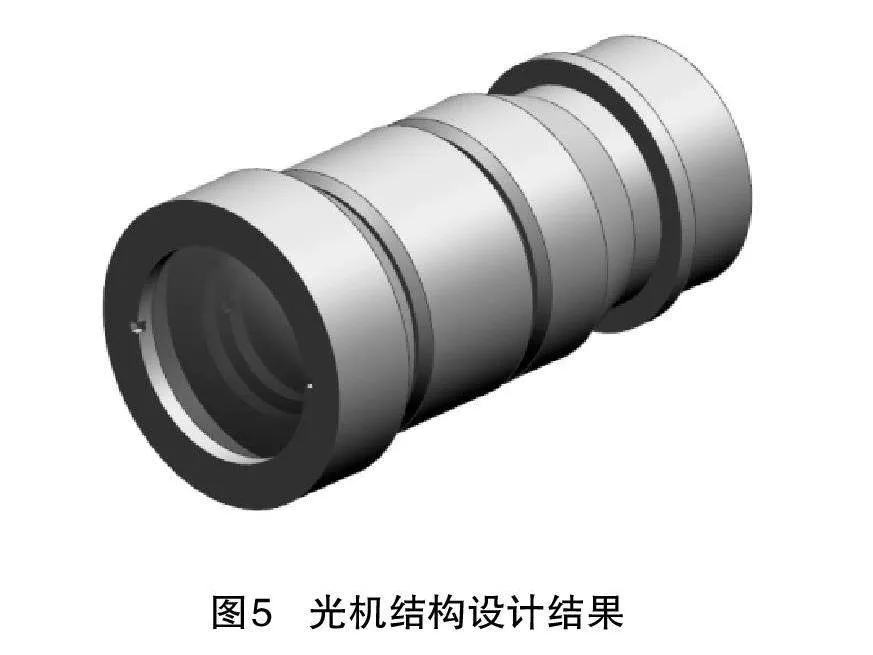
2.3 光机结构设计
图5为镜头的光机结构设计结果。光学镜头机械结构总长60.2 mm,最大直径Ф31 mm。机械结构材料为6061铝合金,表面进行黑色哑光阳极氧化,膜层均匀色泽一致,氧化膜厚度不大于0.02 mm,且进行封闭处理。每个镜片或镜组设计了单独镜座,为了尽可能使镜头轻量化,部分透镜用细牙螺纹压圈压紧,余下的通过环氧树脂粘合剂胶粘。为了适应透镜光学定心后及参与楔形角,压圈的螺纹与镜座的螺纹配合适当放松。
为避免水陆两栖潜水车行驶过程中振动对镜片的应力损伤,在光机界面类型选取方面,尽量采用面接触和相切界面,以减小玻璃和金属界面间的接触应力。其中,采用面接触的明显优点是,倒角和斜边的位置公差和方向公差都可以放宽,降低设计难度。
3 结语
水下视频摄录及监控可以为潜水车的水下行驶提供丰富水下画面,大大提高驾驶体验。本文完成了一款小型水下监控物镜的光学设计和光机结构设计,在保证水下光学成像效果的同时,大大降低镜头的总体质量和体积,为水陆两栖汽车的水下监控应用提供技术支撑。该研究成果在水下安全监测、海洋牧场、深海科考等领域同样具有一定应用前景。
参考文献
孙传东,李驰,张建华,等.水下成像镜头的光学设计[J].光学精密工程,1998(5):7-13.
翟学锋,董晓娜,王国富,等.水下变焦镜头的设计[J].应用光学,2007(4):416-420.
马海宽,曹煊,褚东志,等.应用于海洋监测的水下变焦镜头设计[J].激光与光电子学进展,2017,54(10):68-73.
王雪峰,颜昌翔,王晓东,等.大视场角高分辨率深海探测变焦光学系统设计[J].激光与光电子学进展,2023,60(7):68-74.
曲锐,杨建峰,曹剑中,等.水下大视场角连续变焦光学系统设计[J].红外与激光工程,2021,50(7):233-239.
Jarrett W, Avramov-Zamurovic S, Esposito J ,et al.Machine Learning-Based Underwater Communication System Using Light Carrying Orbital Angular Momentum[J].2022 Conference on Lasers and Electro-Optics (CLEO), 2022:1-2.
孔美巍. 水下无线光通信系统的设计与实验研究[D].杭州:浙江大学,2018.
L Collister-Brian,C Zimmerman-Richard,J Hill-Victoria,et al.Polarized lidar and ocean particles:insights from a mesoscale coccolithophore bloom[J].Applied optics,2020,59(15): 4650-4662.
林宏.海洋悬浮粒子的米氏散射特性及布里渊散射特性研究[D].武汉:华中科技大学,2007.
Milton Laikin. Lens Design, Fourth Edition[M]. America:CRC Press,2016.
丁喆.水下光学成像质量退化机理研究[D].西安:中国科学院大学(中国科学院西安光学精密机械研究所),2022..