基于便携式三维激光扫描仪的路面平整度测评
2024-07-31 00:00:00付靖洋王生怀
湖北汽车工业学院学报 2024年2期



摘 "要:针对当前公路路面测量评定方法结构复杂、成本高昂的问题,构建了基于便携式三维激光扫描仪的测量评定方法。采用三维激光扫描仪对沥青公路路面数据进行测量,获取路面三维点云数据,经分析处理得到路面的三维高程曲面,使用RegularizeData3D算法和经验模态分解等方法对数据进行预处理,重构区域路面不平度,获取路面相应等级的路面平整度数据序列,最后求解和分析试验路面功率谱密度,并根据统计结果对整个试验路面状况进行评价。结果表明:系统能较好地重建所测区域路面的特征信息,路面平整度大部分集中在A级和B级,整体路面平整度在B级以上。
关键词:路面平整度;测量评定方法;RegularizeData3D;经验模态分解;路面功率谱密度
中图分类号:TP391.41;U416.2 " " " " " 文献标识码:A 文章编号:1008-5483(2024)02-0017-04
Measurement and Evaluation of Pavement Leveling Based on
Portable 3D Laser Scanner
Fu Jingyang, Wang Shenghuai
(School of Mechanical Engineering, Hubei University of Automotive Technology, Shiyan 442002, China)
Abstract: In order to solve the problem of complex structures and high costs of the current highway pavement measurement and evaluation methods, a measurement and evaluation method based on a portable 3D laser scanner was constructed. The 3D laser scanner was adopted to measure asphalt highway pavement data and acquire 3D point cloud data of the pavement. The 3D elevation surface of the pavement was obtained after analysis and processing, and the RegularizeData3D algorithm, empirical modal decomposition (EMD), and other methods were utilized to preprocess the data, reconstruct the regional pavement unevenness, and obtain the leveling data series of the corresponding pavement. Finally, the power spectrum density of the experimental pavement was calculated and analyzed, and the entire experimental pavement condition was evaluated based on the statistical results. The experimental results show that the system can better reconstruct the characteristic information of the measured regional pavement. The pavement leveling is mostly concentrated in grades A and B, and the overall pavement leveling is above B grade.
Key words: pavement leveling; measurement and evaluation method; RegularizeData3D; empirical mode decomposition; power spectrum density of pavement
对路面的表面形貌信息进行有效测量并作出评价,成为公路养护领域的重要研究方向。吴秉军等[1]提出一种采用道路表面形貌信息由检测仪器测量全断面平整度的计算方法;曲啸天等[2]用改进后的平整度仪实测路面平整度数据,通过经验模态分解(EMD)算法去除路面干扰项,使用多种评估函数相配合的方法,对路面的平整度进行评估;王国林等[3-8]测量并获取路面结构信息,利用三维软件处理并重构实测路面;徐中源[9-10]等人使用水准仪得到路面信息,对实测数据进行EMD去除趋势项,建立了一个自回归AR模型来求解路面功率谱密度;赵新等 [11]采用三维激光雷达获取道路表面信息,并构建了一套采集系统;Javidi和González等[12-13]获取路面三维数据时,使用多种三维仪器相配合的方法,精准测量实验道路;Yu S J等[14]开发了一套远距离收集路面信息的车载激光路面测量系统;Deng等[15]使用英国摆锤测试仪和便携式高分辨率3D激光扫描仪相结合的方式采集路面数据;Bidgoli A M等[16]开发了一个基于传感器和地理定位系统的自动化路面状况数据收集系统;Kai C等[17]利用激光雷达构建了道路识别系统,并利用激光雷达点云数据测量路面高程信息。上述研究均采用非接触式激光测量仪器对路面进行测量和评定,获取的路面结构信息详细,但测量评定方法结构复杂、成本高昂。基于此,文中提出了一套基于便携式三维激光扫描仪的测量评定方法,采用便携式三维激光扫描仪测量试验路面得到路面平整度数据,使用RegularizeData3D算法和EMD方法对检测得到的数据进行预处理,再借助Pyulear算法对道路功率谱密度进行求解,得到试验路面的功率谱密度,根据求解结果对路面状况进行有效评价。
1 评定方法工作原理
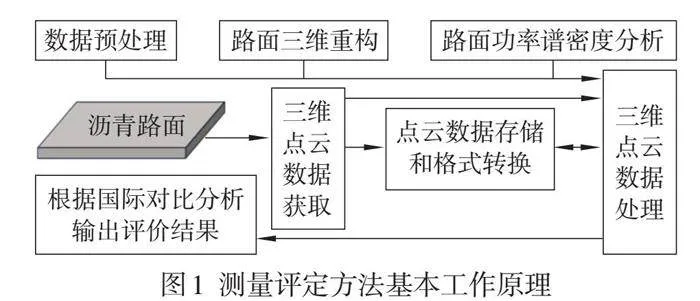
如图1所示,评定方法的工作流程包括获取三维点云数据、处理点云数据、分析后得出评估结果。通过便携式三维扫描仪和计算机共同获取三维点云数据,被检测路面表面信息通过数字化转换成点云数据存储到仪器配套软件中进行存储。对检测数据的处理是评定方法的核心部分。使用仪器软件进行简化和降噪等处理,得到处理后的点云文件;再通过MATLAB编程和算法完成对点云数据的读取,实现对路面表面的三维重构,达到对试验路面的三维可视化表达;最后基于预处理数据求解路面功率谱密度,根据求解得到的结果对路面特征进行分析,与GB/T7031—2005中给定的路面平整度标准进行对比,得到试验路面的平整度等级。
2 路面不平度数据采集
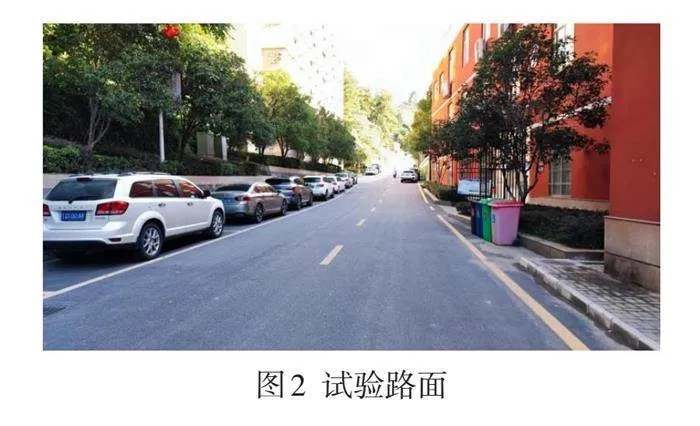
选定试验路面如图2所示,沥青路面长50 m、宽6 m,测量路面时,仅获取直线段路面信息,取长度40 m、宽5 m,沿长度方向每隔2 m、宽度方向每隔0.5 m测量1次。经过对路面的初步判断,考虑到激光扫描仪的测量精度、测量速度和试验成本等因素,选用的采集设备为武汉中观公司生产的RigelScan Elite便携式三维扫描仪(图3)。此激光仪具有单边扫描、多边扫描等多种扫描功能,拥有28条扫描激光束,且具有双重扫描模式,测量精度最高为0.02 mm,分辨率最高为0.01 mm,体积精度为0.02+0.035 mm·m⁻¹,结合全局测量系统Photoshot则体积精度为0.02+0.015 mm·m⁻¹,并且兼容UG、Polyworks、Geomagic studio等三维设计软件,操作方便适用范围广。因为检测仪器为光学仪器,实验环境对数据获取有较大的影响。为消除日光照射的影响,检测路面时间选择在夜间进行,如图4所示。试验路面三维重构模型如图5所示,可以看出,经三维重构后的路面模型与所测路面相符。
3 实测路面数据预处理
3.1 RegularizeData3D算法
RegularizeData3D算法是GridFit算法的修改版,能够从散乱的输入数据中产生一个平滑的三维表面。GridFit算法的立方体插值功能和线性插值功能比较粗糙,并且平滑度参数定义不明确,容易出现过拟合和拟合不到位的情况。而在RegularizeData3D算法中,插值拟合功能得到了改善和提高,平滑度参数是指平滑度与保真度的比值,不会因为输出网格分辨率而受到影响。通过对Smoothness参数的调整,几乎能在低噪点数据上达到与输出表面完全一致的效果。因此,选用RegularizeData3D计算方法,能更好地还原路面信息,更直观地观测三维扫描后的路面平整度信息,提高路面信息视觉化表达的精确性。采用RegularizeData3D算法平滑函数处理后,拟合路面如图6所示。
3.2 去趋势项处理
由于试验路面具有坡度,评定过程中产生较大误差,误差用趋势项表示。为消除路面坡度对评定结果的影响,采用EMD方法,即
[M1t=emaxt+emint2] (1)
式中:[M1t]为试验路面采集数据计算后的包络均值;[emaxt]为上包络线;[emint]为下包络线。根据路面平整度采集数据的所有峰值和谷值,通过三次样条函数插值拟合得到包络线。将路面平整度采集数据序列[Xt]减去[M1t],得到去掉低频段之后的新数据:
[H1,1t=Xt-M1t] (2)
若[H1,1t]满足固有模态函数(intrinsic mode function, IMF)的理论必要条件,则为测量采集数据的第1阶IMF函数。此时,可得出采集数据的1阶IMF分量为
[C1t=IMF1t=H1,1t] (3)
将[Xt]减去[C1t],得到去掉高频段之后的新路面平整度序列[R1t]为
[R1t=Xt-C1t] (4)
重复上述计算,得到第n阶IMF分项[Cnt],直到第n项[Rnt]或[Cnt]小于EMD程序中人工设置的原始值,或直到第n项[Rnt]计算后得到一个单调函数或常数,此时可停止模态分解过程。分解后的路面平整度最终可使用的数据序列为
[X(t)=i=1nCit-Rnt] (5)
根据上述原理,对试验路面的测量采集数据进行EMD分解,获取一系列高频率和低频率段的IMF函数,同时得到去除试验路面趋势项后的路面平整度数据,用于后续的路面功率谱密度分析。
4 求解道路功率谱密度
采用MATLAB中的Pyulear函数对试验路面的道路功率谱求解并分析,得到功率谱曲线,与GB/T7031—2005中路面平整度分级线进行比对,如图7所示。由图7可观察到,试验道路的功率谱密度曲线在低频段中波动较大,在高频段中波动较小;试验路面的特性参数都位于A、B分级线之间,得出试验路面等级在B级路面以上、A级路面以下。
5 结论
文中构建了一种路面测量评定方法,采用手持三维激光扫描仪测量试验路面三维点云数据,通过RegularizeData3D算法和EMD去除趋势项等方法对数据进行处理,完成路面的三维等效重构,能较好地还原原始路面信息,对试验路面功率谱密度进行求解并作出评价,结果表明,所测区域路面整体水平较好,整体属于B级路面,其特性参数在A级和B级之间。
参考文献:
[1] "吴秉军,刘东海,孙源泽,等. 基于路面高程自动测量的全断面平整度计算方法[J]. 中国公路学报,2016,29(11):10-17.
[2] "曲啸天,赵强,赵吉业,等. 基于实测不平度的路面等级分析与评价[J]. 中外公路,2019,39(1):40-45.
[3] "王国林,魏领军,景鹏,等. 汽车道路路面谱采集典型道路选择方法[J]. 合肥工业大学学报(自然科学版),2009,32(5):640-643.
[4] "刘永臣,王国林,杨彦鹏,等. 基于实测道路谱的路面等效重构[J]. 农业工程学报,2012,28(19):26-32.
[5] "王国林,魏领军,王启唐,等. 路面平整度主观评价方法及其试验验证[J]. 中外公路,2009,29(1):40-42.
[6] "段虎明,石峰,谢飞,等. 路面不平度研究综述[J]. 振动与冲击,2009,28(9):95-101.
[7] "汪斌,过学迅,杨波,等. 路面不平度再现方法研究[J]. 汽车科技,2008(5):29-32.
[8] "过学迅,刘汉斌,汪斌,等. 路面不平度的测量与重构[J]. 车辆与动力技术,2010(4):14-18.
[9] "徐中源. 基于实测路面信息的三维虚拟路面重构研究[D]. 青岛:青岛大学,2018.
[10] "徐中源,李雪峰,孙荣强,等. 基于实测路面高程数据的路面不平度研究[J]. 青岛大学学报(工程技术版),2018,33(2):104-107.
[11] "赵新,李杰,岳丹丹,等. 三维激光雷达果园路面不平度采集试验与分析[J]. 华中农业大学学报(自然科学版),2022,41(2):227-236.
[12] "Javidi B,Kim D,Kishk S E S. A laser-based 3D data acquisition system for the analysis of pavement distress and roughness[R]. Connecticut Transportation Institute,University of Connecticut,School of Engineering,2004.
[13] "González A,O’Brien E J,Li Y Y,et al. The Use of Vehicle Acceleration Measurements to Estimate Road Roughness[J]. Vehicle System Dynamics,2008,46(6):483-499.
[14] "Yu S J,Sukumar S R,Koschan A F,et al. 3D Reconstruction of Road Surfaces Using an Integrated Multi-sensory Approach[J]. Optics and Lasers in Engineering,2007,45(7):808-818.
[15] "Deng Q,Zhan Y,Liu C,et al. Multiscale power spectrum analysis of 3D surface texture for prediction of asphalt pavement friction[J]. Construction and Building Materials,2021,293:123506.
[16] "Arbabpour Bidgoli M,Golroo A,Sheikhzadeh Nadjar H,et al. Road Roughness Measurement Using a Cost-effective Sensor-based Monitoring System[J]. Automation in Construction,2019,104:140-152.
[17] "Chen K. Road Roughness Recognition Based on Lidar[J]. Journal of Physics:Conference Series,2022,2278(1):012008.
猜你喜欢
摄影世界(2022年1期)2022-01-21 10:50:14
建材发展导向(2019年11期)2019-08-24 06:36:06
建材发展导向(2019年10期)2019-08-24 06:25:40
知识经济·中国直销(2018年12期)2018-12-29 12:22:14
江西建材(2018年1期)2018-04-04 05:26:16
商周刊(2017年6期)2017-08-22 03:42:36
山东大学法律评论(2016年0期)2016-08-16 03:24:12
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
现代营销·经营版(2015年3期)2015-04-20 06:46:58
河南科技(2014年8期)2014-02-27 14:08:04