基于CNN-LSTM的重型载货车侧翻预测
2024-07-31 00:00:00高梦涵冯樱
湖北汽车工业学院学报 2024年2期



摘 "要:针对车辆在运行过程中左右侧车轮垂直载荷难以直接测量的问题,结合卷积神经网络(convolutional neural network,CNN)和长短时记忆神经网络(long short-term memory,LSTM)对横向载荷转移率(lateral load transfer rate,LTR)进行预测。建立重型载货车TruckSim动力学模型,在鱼钩工况、J-Turn工况和双移线工况下采集车辆的侧向加速度、横摆角速度等行驶状态参数。在MATLAB中建立CNN-LSTM模型,利用CNN-LSTM模型的特征提取和时间序列预测功能,对重型载货车LTR值进行预测,并在多种工况下验证CNN-LSTM模型的性能。结果表明:在不同行驶工况、车辆参数及路面条件下,CNN-LSTM模型能够对重型载货车LTR值进行有效预测。
关键词:重型载货车;侧翻预测;横向载荷转移率;时间序列预测
中图分类号:U463.33 " " " " " " " " " " " " " 文献标识码:A 文章编号:1008-5483(2024)02-0006-06
Rollover Prediction of Heavy-duty Trucks Based on CNN-LSTM
Gao Menghan, Feng Ying
(School of Automotive Engineering, Hubei University of Automotive Technology, Shiyan 442002, China)
Abstract: To address the difficulty in directly measuring the vertical load of the left and right wheels during vehicle operation, a convolutional neural network (CNN) and a long short-term memory neural network (LSTM) were used to predict the lateral load transfer rate (LTR). By establishing a TruckSim dynamic model for heavy-duty trucks, state parameters of the vehicle under fishhook, J-Turn, and double lane conditions were collected, such as lateral acceleration and yaw velocity. A CNN-LSTM model was established in MATLAB, and the feature extraction and time series prediction functions of the model were used to predict the LTR of heavy-duty trucks. In addition, the performance of the CNN-LSTM model was verified under various working conditions. The experimental results show that the CNN-LSTM model can effectively predict the LTR of heavy-duty trucks under different driving conditions, vehicle parameters, and road conditions.
Key words: heavy-duty trucks; rollover prediction; LTR; time series prediction
重型载货车由于车身及货物质量大,重心相对较高,因此在快速变线或紧急避让时更容易发生侧翻。根据NHTSA侧翻事故统计数据显示,1982年至2021年,美国重型载货车侧翻的平均死亡率为44.1%[1],提高重型载货车防侧翻技术水平显得尤为重要。国内外学者对侧翻预警和防侧翻控制进行了大量研究。褚端峰等[2]提出一种新的侧翻评价指标,将车辆当前侧向加速度与实时极限侧向加速度的比值作为侧翻的判定条件,结合TTR计算车辆在未来发生侧翻的时间。Tianjun Zhu等[3]结合概率计算提出了基于支持向量机经验模型的新型车辆侧翻预警算法。Quguang Guan等[4]将非承载轮的垂直载荷与车辆总重的比值作为侧翻评估指标来实现侧翻预警。Zhiguo Zhao等[5]建立了基于AR-HMM的侧翻预警模型,利用算法预测未来某时刻内车辆的运行状态,准确率达到96.3%。金智林等[6]基于线性三自由度汽车侧翻动力学模型,计算了横向载荷转移率(lateral load transfer rate,LTR)及其一次变化率和二次变化率,得到汽车侧翻预警时间。王朝阳[7]在三自由度车辆侧翻运动学模型的基础上建立LTR估计器,建立了商用车侧翻灰色预测模型。张昊等[8]以车辆归一化的零力矩点横向偏移为预警指标,使用模型预测控制器对横摆力矩与侧向加速度进行分析,通过差动制动分配力矩实现车辆防侧翻。高泽鹏等[9]利用高斯混合马尔可夫模型对当前车辆状态下与侧翻相关的变量进行训练,提出基于极限学习机的车辆侧翻预警方法。朱天军等[10]利用AdaBoost学习算法构建了多个弱分类器的架构,实现了复杂行驶工况下重型载货车辆侧翻评价指标的实时准确计算。上述研究的重点在于侧翻评价指标的选择和侧翻预警方法的创新,未充分考虑车辆实际行驶工况的多样性,以及车辆行驶历史状态对当前侧翻状态的影响。文中结合卷积神经网络(convolutional neural network,CNN)和长短时记忆神经网络(long short-term memory,LSTM),构建了基于CNN-LSTM的重型载货车侧翻预测模型,并在MATLAB中对多种工况和行驶条件下的侧翻预测模型效果进行验证。
1 重型载货车侧翻评价指标及因素
1.1 重型载货车侧翻评价指标
1) 侧翻仿真模型 利用TruckSim建立重型载货车动力学模型。车辆模型设置为6档自动变速器、前后非独立悬架、液压制动方式,模型的主要参数如表1所示。
2) 侧翻评价指标 在对车辆侧翻稳定性分析中,以侧倾角、横摆角速度或侧向加速度作为侧翻判定标准,不能全面反映车辆侧翻状态。文中选择可信度更高的LTR[11]值作为重型载货车的侧翻评价指标,LTR计算公式:
[RLT=Fr,i-Fl,iFr,i+Fl,i] (1)
式中:RLT为重型载货车的LTR值;[Fr,i]为作用于第[i]个右轮上的垂直载荷;[Fl,i]为作用于第[i]个左轮上的垂直载荷。由式(1)可知RLT取值范围[[-1,+1]],当RLT取[±1]时,车辆已经开始发生侧翻。
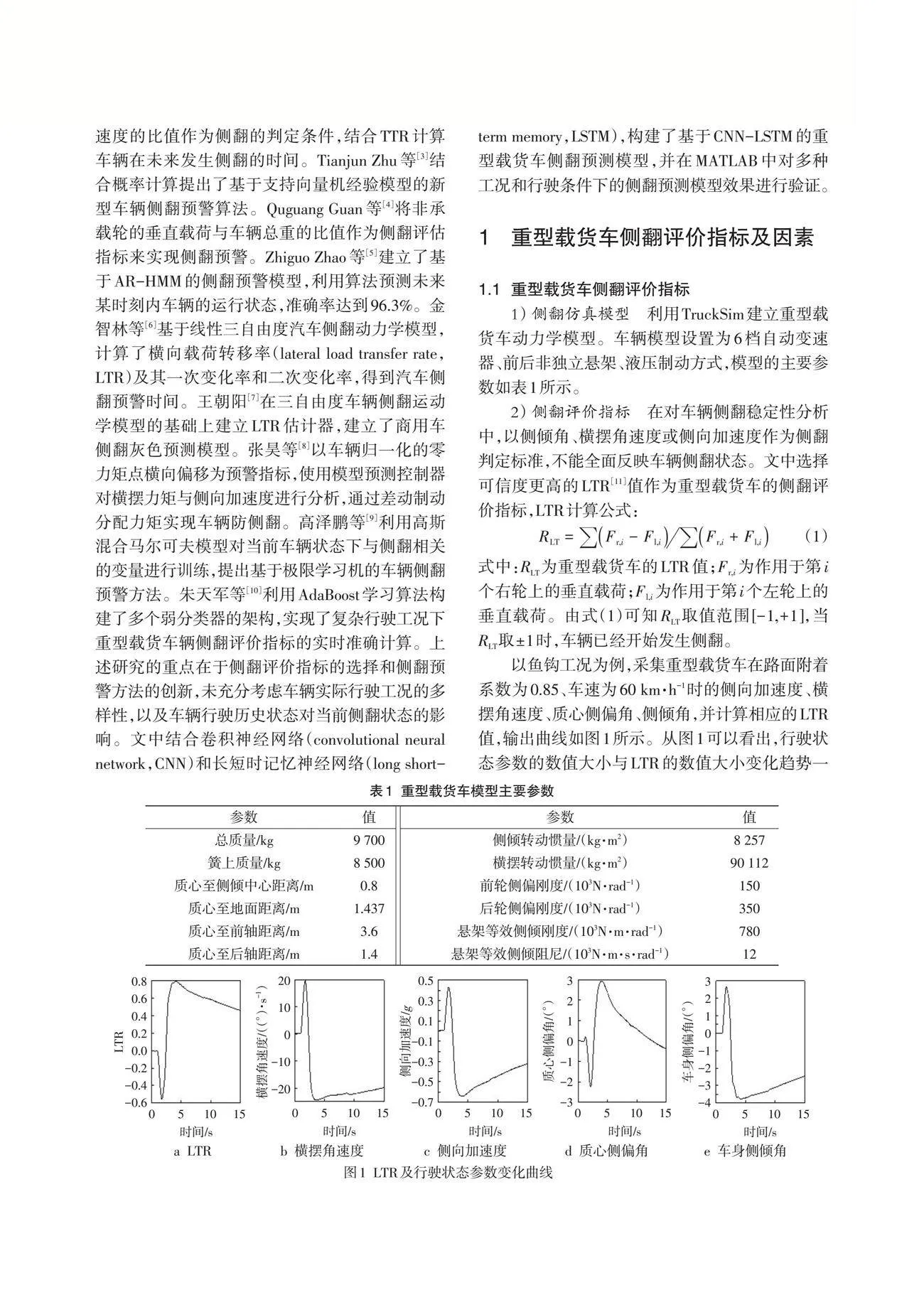
以鱼钩工况为例,采集重型载货车在路面附着系数为0.85、车速为60 km·h-1时的侧向加速度、横摆角速度、质心侧偏角、侧倾角,并计算相应的LTR值,输出曲线如图1所示。从图1可以看出,行驶状态参数的数值大小与LTR的数值大小变化趋势一致,并在同时到达峰值。因此选择重型载货车的侧向加速度、横摆角速度、质心侧偏角、侧倾角对LTR值进行预测。
1.2 重型载货车侧翻影响因素分析
车辆侧翻主要包含车辆因素、道路因素和驾驶员因素。车辆因素主要指车辆的固有特性,如车辆操纵稳定性、车辆外形尺寸、车辆的装载情况等。道路因素主要指道路的附着系数、道路坡道角、弯道半径等。驾驶员因素主要指车辆的行驶速度、转向输入角速度和其他操作方式[12]。文中重点研究了重型载货车车速、路面附着系数、质心高度以及方向盘转角对车辆侧翻的影响。
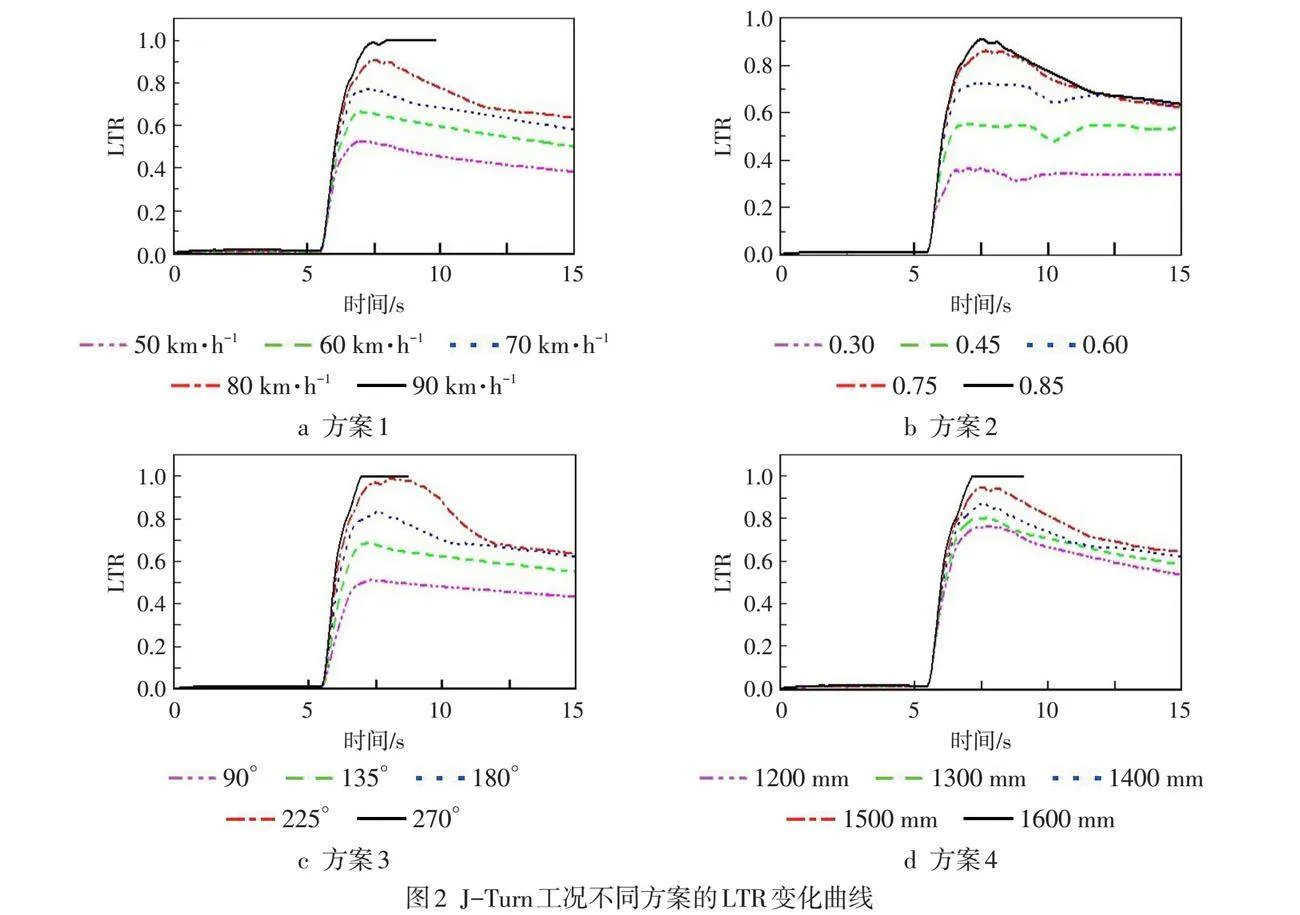
在J-Turn工况下,设定基准参数:车速为80 km·h-1、路面附着系数为0.85、质心高度为1 400 mm、方向盘转角为200°。方案1~4分别对应取不同的车速、路面附着系数、方向盘转角、质心高度,在其他参数不变的情况下,进行大量仿真试验,得到各方案下重型载货车行驶过程中的LTR变化曲线,如图2所示。从图2可以看出,车速、路面附着系数、方向盘转角和质心高度均对LTR值产生不同程度影响。随着各方案取值的增加,LTR值增大,车辆侧翻的危险性增大。因此,车速、路面附着系数、方向盘转角和质心高度是影响重型载货车侧翻的重要因素。
2 车辆侧翻预测模型
2.1 数据采集
依据GB/T6323—2014,文中选取鱼钩工况、J-Turn工况、双移线工况,进行重型载货车侧翻试验[13]。试验参数按照1.2中方案1~4进行设置,试验中采集车辆行驶过程的侧向加速度、横摆角速度、质心侧偏角、车身侧倾角,作为预测模型的输入,计算相应的LTR,作为预测模型的输出。
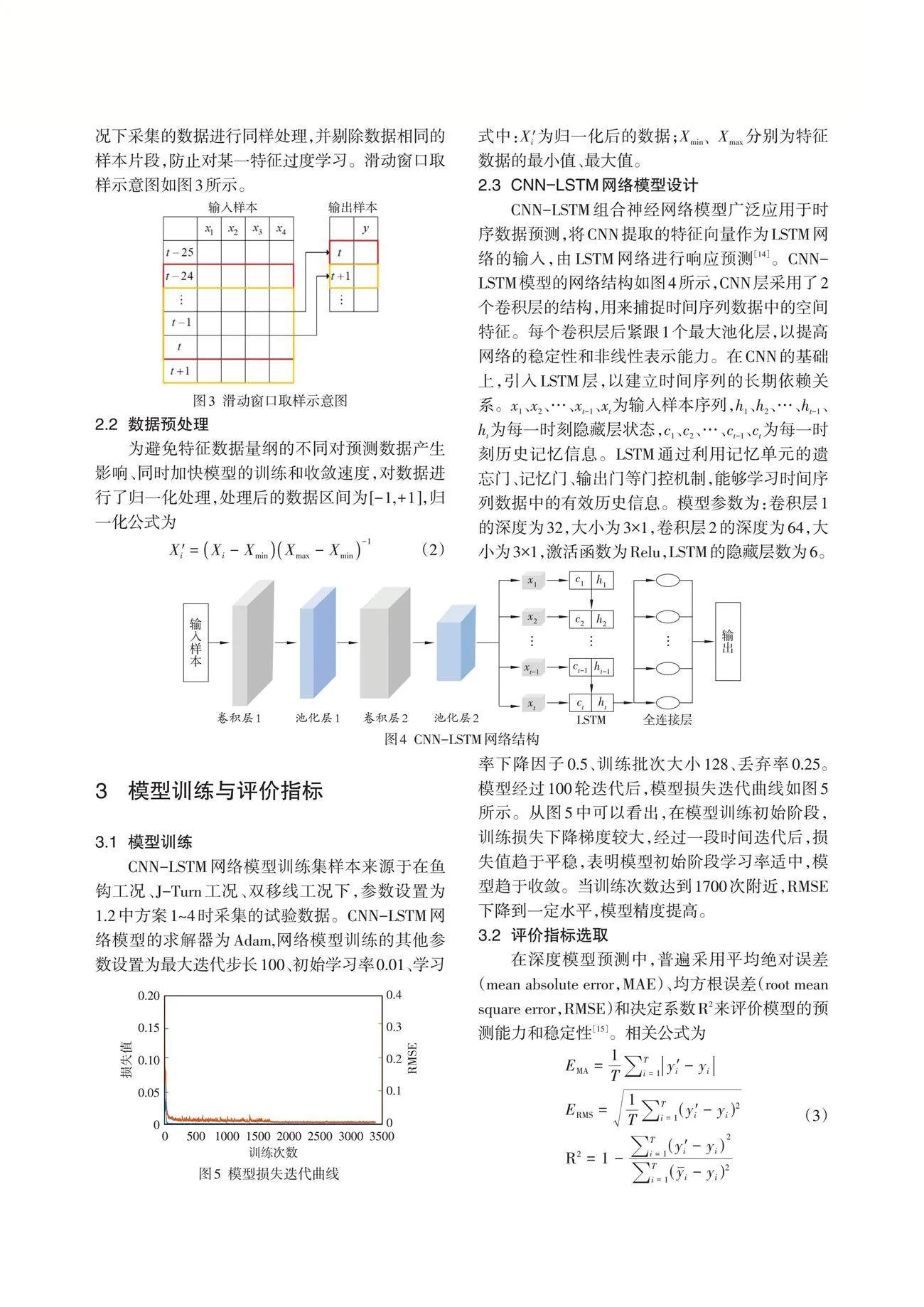
为了实现CNN对时序数据的特征提取,保证输入特征在时间上的连续,采取滑动窗口的方式对输入样本数据进行取样。经多番验证,滑动窗口大小为25时,单个输入样本是具有4个特征维度和25个时间步的时序数据,此时LSTM神经网络单元能够最大程度保留历史有效信息,单个输出样本为相应输入样本第25个时间步的LTR值。
设置仿真步长为0.01,仿真时间为15 s,车速为50 km·h-1,鱼钩工况下车辆未发生侧翻,此时预测模型的输入样本数据大小为4×1 501,将该样本数据进行滑动窗口取样,设置滑动步长为1,得到1 477个大小为4×25的输入样本片段。对其他工况下采集的数据进行同样处理,并剔除数据相同的样本片段,防止对某一特征过度学习。滑动窗口取样示意图如图3所示。
2.2 数据预处理
为避免特征数据量纲的不同对预测数据产生影响、同时加快模型的训练和收敛速度,对数据进行了归一化处理,处理后的数据区间为[[-1,+1]],归一化公式为
[X′i=Xi-XminXmax-Xmin-1] (2)
式中:[X′i]为归一化后的数据;[Xmin、Xmax]分别为特征数据的最小值、最大值。
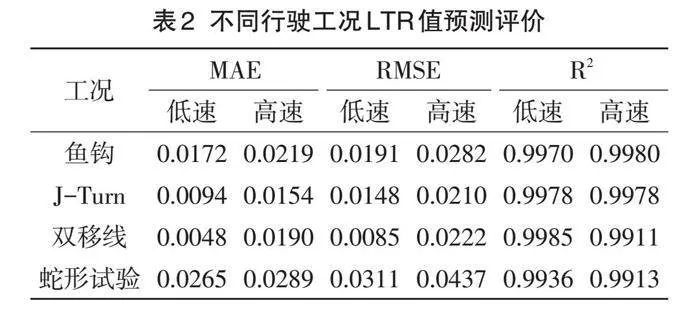
2.3 CNN-LSTM网络模型设计
CNN-LSTM组合神经网络模型广泛应用于时序数据预测,将CNN提取的特征向量作为LSTM网络的输入,由LSTM网络进行响应预测[14]。CNN-LSTM模型的网络结构如图4所示,CNN层采用了2个卷积层的结构,用来捕捉时间序列数据中的空间特征。每个卷积层后紧跟1个最大池化层,以提高网络的稳定性和非线性表示能力。在CNN的基础上,引入LSTM层,以建立时间序列的长期依赖关系。x1、x2、…、xt-1、xt为输入样本序列,h1、h2、…、ht-1、ht为每一时刻隐藏层状态,c1、c2、…、ct-1、ct为每一时刻历史记忆信息。LSTM通过利用记忆单元的遗忘门、记忆门、输出门等门控机制,能够学习时间序列数据中的有效历史信息。模型参数为:卷积层1的深度为32,大小为3×1,卷积层2的深度为64,大小为3×1,激活函数为Relu,LSTM的隐藏层数为6。
3 模型训练与评价指标
3.1 模型训练
CNN-LSTM网络模型训练集样本来源于在鱼钩工况、J-Turn工况、双移线工况下,参数设置为1.2中方案1~4时采集的试验数据。CNN-LSTM网络模型的求解器为Adam,网络模型训练的其他参数设置为最大迭代步长100、初始学习率0.01、学习率下降因子0.5、训练批次大小128、丢弃率0.25。模型经过100轮迭代后,模型损失迭代曲线如图5所示。从图5中可以看出,在模型训练初始阶段,训练损失下降梯度较大,经过一段时间迭代后,损失值趋于平稳,表明模型初始阶段学习率适中,模型趋于收敛。当训练次数达到1700次附近,RMSE下降到一定水平,模型精度提高。
3.2 评价指标选取
在深度模型预测中,普遍采用平均绝对误差(mean absolute error,MAE)、均方根误差(root mean square error,RMSE)和决定系数R2来评价模型的预测能力和稳定性[15]。相关公式为
[EMA=1Ti=1Ty′i-yiERMS=1Ti=1T(y′i-yi)2R2=1-i=1T(y′i-yi)2i=1T(yi-yi)2] (3)
式中:EMA为MAE的计算值;ERMS为RMSE的计算值;[yi]为LTR的真实值;[y′i]为LTR预测值;[yi]为预测值的平均值。RMSE受异常值的影响更大,通过观察MAE与RMSE的比值,可以找到预测结果中的异常错误。R2是用来评估模型拟合程度好坏的指标,取值范围在0到1之间,越接近1表示模型的拟合程度越好。综上所述,所设计的重型载货车侧翻预测流程如图6所示。
4 预测结果及分析
为了验证预测模型的有效性,选取与训练集不同的参数进行试验,在基准参数的基础上调整某项参数制定试验方案。设定基准车速为80 km·h-1、路面附着系数为0.85、质心高度为1400 mm、方向盘转角为200°。
4.1 不同行驶工况
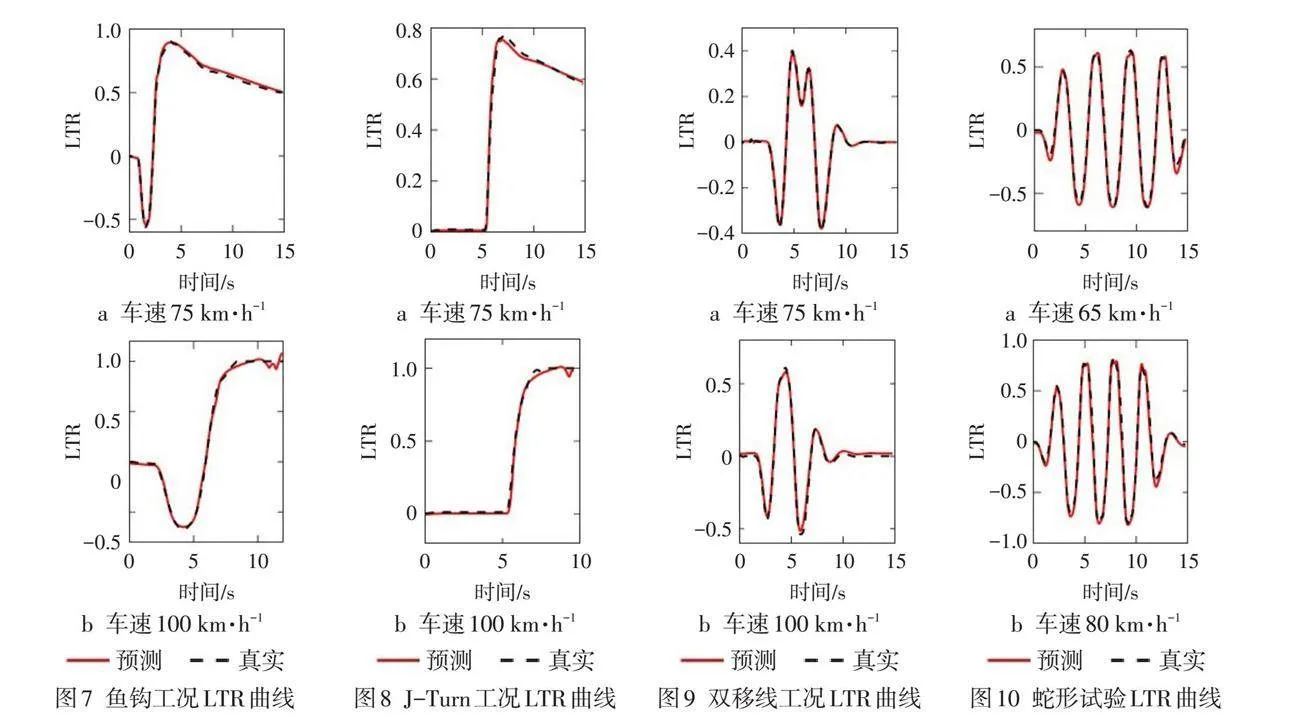
设定车速为75 km·h-1、100 km·h-1时,进行鱼钩工况、J-Turn工况和双移线工况验证试验,3种行驶工况的LTR曲线如图7~9所示。设定车速为65 km·h-1、80 km·h-1时进行蛇形试验,LTR曲线见图10。根据4种行驶工况在高速行驶和低速行驶时的预测数据计算MAE、RMSE、R2,结果如表2所示。由图7~10和表2可知,在不同行驶工况及不同车速下,所提出的预测模型均能实现对LTR值的预测,R2均大于0.9,MAE和RMSE均在0.05以下,预测精度高。说明CNN-LSTM网络预测模型能够适用于不同行驶工况,具备一定的泛化性能。
4.2 J-Turn工况下的不同行驶条件
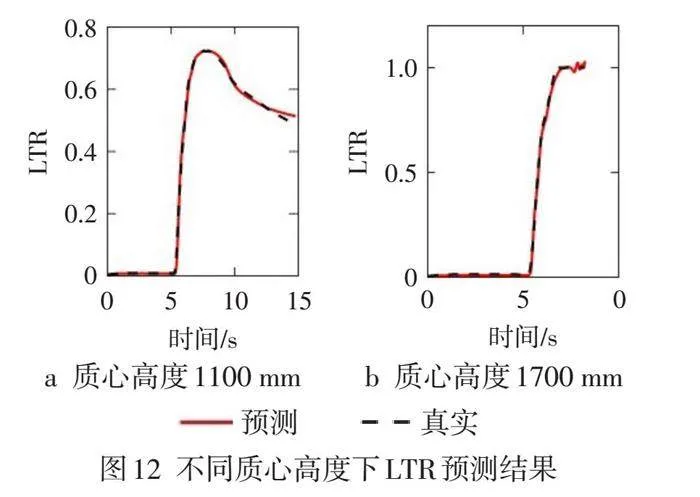
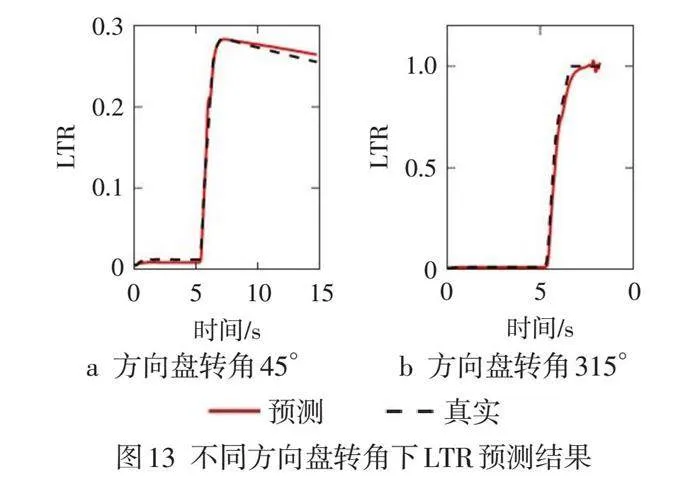
在J-Turn工况下,路面附着系数为0.18和1时LTR曲线如图11所示,质心高度为1100 mm和1700 mm时LTR曲线如图12所示,方向盘转角为45°和315°时LTR曲线如图13所示。根据预测结果计算CNN-LSTM预测模型的相关评价指标MAE、RMSE、R2,结果如表3所示。图11~13和表3体现了重型载货车在不同的影响因素取值下,模型对LTR值的预测性能。相关系数R2保持在0.9以上,预测误差MAE和RMSE均不超过0.06。由此可知,文中提出的CNN-LSTM网络预测模型在不同路面附着系数、不同质心高度及不同方向盘转角下均能准确地对LTR进行预测,且具有较高的预测精度,说明该模型稳定性好。
5 结论
基于重型载货车TruckSim模型仿真试验,利用行驶状态参数与横向载荷转移率LTR的相关性,建立CNN-LSTM网络模型对横向载荷转移率LTR进行预测。考虑多种侧翻影响因素的CNN-LSTM网络预测模型,在不同的行驶工况和行驶条件下,可以实现由行驶状态参数对LTR的预测。该方法能够适应重型载货车复杂多样的行驶工况,实时准确的得到车辆侧翻状态。在未来研究中,将对车辆侧翻机理进行深入分析,从人-车-路全面的探究车辆侧翻因素和参数,考虑不确定条件下的车辆侧翻预测模型参数表征问题。
参考文献:
[1] "李一兵,孙岳霆,徐成亮. 基于交通事故数据的汽车安全技术发展趋势分析[J]. 汽车安全与节能学报,2016,7(3):241-253.
[2] "褚端峰,崔剑,邓泽健,等. 基于改进TTR算法的车辆侧翻预警研究[J]. 中国机械工程,2016(11):1557-1561.
[3] "Zhu T J,Yin X X,Na X X,et al. Research on a Novel Vehicle Rollover Risk Warning Algorithm Based on Support Vector Machine Model[J]. IEEE Access,2020,8:108324-108334.
[4] "Guan Q G,Gong A H,Hu M M,et al. Anti-rollover Warning Control of Dump Truck Lifting Operation Based on Active Suspension[J]. Journal of Control,Automation and Electrical Systems,2021,32(1):109-119.
[5] "Zhao Z,Chen N,Wang Y,et al. The Model and Algorithm of Rollover Warning for Heavy Duty Vehicle Based on AR-HMM[A]. Journal of Investigative Medicine[C]. Lippincott Williams amp; Wilkins Two Commerce SQ,2001 Market ST,Philadelphia ,2014,62(8):S98–S98.
[6] "金智林,严正华. 基于二次预测型横向载荷转移率的汽车侧翻预警研究[J]. 中国机械工程,2019,30(15):1790-1795.
[7] "王朝阳. 基于工况识别的商用车侧翻预警方法研究[D]. 武汉:武汉理工大学,2021.
[8] "张昊,李擎. 微型货车高速转弯的改进模型预测防侧翻控制[J]. 科学技术与工程,2023,23(19):8264-8272.
[9] "高泽鹏,任宏斌,陈思忠,等. 基于极限学习机在线学习的车辆侧翻状态预测[C]// 2020中国汽车工程学会年会暨展览会. 2020中国汽车工程学会年会论文集. 上海:2020:481-488.
[10] "朱天军,麻威,王振峰,等. 基于AdaBoost算法的重型车辆侧翻预警研究[J]. 重庆交通大学学报(自然科学版),2021,40(8):25-33.
[11] "徐中明,于海兴,伍小龙,等. 车辆侧翻指标与侧翻风险因素分析[J]. 重庆大学学报,2013,36(3):25-31.
[12] "杨晶晶. 基于TruckSim的客车侧翻影响因素研究[D]. 西安:长安大学,2019.
[13] "国家质量监督检验检疫总局,中国国家标准化管理委员会. 汽车操纵稳定性试验方法:GB/T 6323—2014[S]. 北京:中国标准出版社,2014:56.
[14] "张学兵,谢啸楠,王礼,等. 基于CNN-LSTM混合神经网络的高速铁路地震响应预测[J]. 湘潭大学学报(自然科学版),2024,46(1):1-13.
[15] "高亚军,唐力辉,王振鹏,等. 基于循环神经网络和数据差分处理的油田产量预测方法[J]. 中国海上油气,2023,35(3):126-136.