
基于Smart3D的倾斜摄影真三维模型的建立研究
2024-07-15 00:00:00王娜
科技资讯 2024年9期


摘要:倾斜摄影测量技术是近年来发展迅速的新兴科学技术,满足了研究和应用领域的广泛需求,在城市三维实景建模中有着广阔的应用前景。针对吉林某大学三维建模任务,分别从数据获取、模型构建等方面详细介绍了基于Smart3D软件的倾斜摄影三维建模的方法步骤,并对测区进行三维场景构建,同时对三维模型场景成果的精度进行了分析。结果表明,基于倾斜摄影测量的自动化真三维建模方式建模速度快、质量高、工程量较少,构建的三维场景细节丰富。
关键词:倾斜摄影测量三维模型空三加密精度评价
ResearchontheEstablishmentofaTrue3DModelofObliquePhotographyBasedonSmart3D
WANGNa
JilinProvincialInstituteofPhotogrammetryandRemoteSensing,Changchun,JilinProvince,130051China
Abstract:Theobliquephotogrammetryisanemergingscientifictechnologythathasrapidlydevelopedinrecentyears,whichmeetsthewideneedsofresearchandapplicationfieldsandhasbroadapplicationprospectsinurban3Drealscenemodeling.Forthe3DmodelingtaskofauniversityinJilin,thispaperprovidesadetailedintroductiontothemethodsandstepsofthe3DmodelingofobliquephotographybasedonSmart3Dsoftwarefromtheaspectsofdataacquisitionandmodelconstruction,constructsthe3Dsceneofthemeasurementarea,andanalyzestheaccuracyofthe3Dmodelsceneresults.Theresultsshowthattheautomatedtrue3Dmodelingmethodbasedonobliquephotogrammetryhasfastmodelingspeed,highqualityandlessengineeringquantity,andthattheconstructed3Dscenehasrichdetails.
KeyWords:Obliquephotogrammetry;3Dmodel;Aerialtriangulation;Accuracyevaluation
三维模型的本质是基于二维地理信息所制作的三维地理信息,是对传统二维地理信息的革新与升级,较之二维地理信息,表现更为系统、逼真、更具立体性。三维模型场景能提供一种更加直观、更为真实的可视化功能,不仅能对城市各自然要素进行浏览查看,还能对建设要素进行分析[1]。
三维模型创建方式有两种。一是利用二维线划数据和与之对应的高度属性信息,开展三维建模,并采集现实纹理图片,贴于建筑物表面。此种方式构建的模型精度高、纹理真实,但由于周期长及成本高,不适用大区域作业。二是采用数字摄影测量技术进行三维建模,地物及地表特征点线面等数据信息的采集速度快,建模过程自动化,还支持外形规则的建筑物的纹理自动化提取。此方式真实度高、建模速度快,因而可以对大场景进行实时更新[2]。本文结合吉林某大学校区内实景三维建模需求,探讨了基于倾斜摄影测量的三维建模技术流程。
1测区数据获取
测区位于吉林某大学校区内,面积约为1.41km2。测区内主要建筑有图书馆、网球馆、宿舍区、教学楼等。测区范围如图1所示。
1.1影像数据获取
航飞质量主要受航线、相对航高、重叠度的影响,为得到高质量的航拍影像,需要在进行航飞计划时对这些参数进行设置。
本次测量采用红鹏六轴无人机AC1600,相机型号为SONYILCE-7RM2,传感器大小为35.9mm,相机焦距为35.1701mm,无人机航高为180m,航向和旁向重叠度都是70%。共得到5组影像共1255张影像图片及对应的Pos点数据,影像宽度为7952像素,高度为5304像素。
1.2像控点数据获取
控制点坐标值是摄影测量的重要参数。根据作业要求确定控制点个数,并对控制点坐标和高程值进行外业测量。
1.2.1像片控制点布设方案
依据航线规划和影像数据,主要采用区域网法布点方案[3],依据控制点布设原则,选取测区域内28个控制点作为像控点参与解算,如图2所示。
1.2.2像控点选测
像控点的精度要求:相对邻近的基本像控点,平面像控点和平高像控点的图中误差不超过0.2mm。高程像控点和平高像控点的高程中误差不超过0.1m[4]。
像控点位置都用适应大小的“十字丝”在影像上进行标示,并用文字对点位位置进行详细描述,便于内业人员判读[5]。采用统一规格的点之记表格对像控点信息进行记录,表格的主要内容有像控点点名、作业人员姓名、像控点坐标、点位全图、点位略图、点位详图、点位说明等。
2三维模型创建
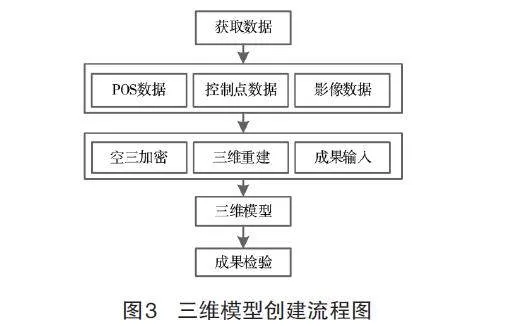
基于计算机视觉三维重建算法,Smart3D软件只需结合飞行过程中获取的Pos数据即可解算出精确的外方位元素。并采用基于特征的匹配算法匹配同名点,采用光束法区域网平差方法进行多视影像联合平差,并根据聚簇算法和基于面片的密集匹配算法完成高密度点云初步构建[6]。最后,基于点云构建的TIN网模型配合纹理映射,实现实景三维模型的构建(如图3所示)。下面详细阐述其中空三加密和成果检验2个环节。
![]()
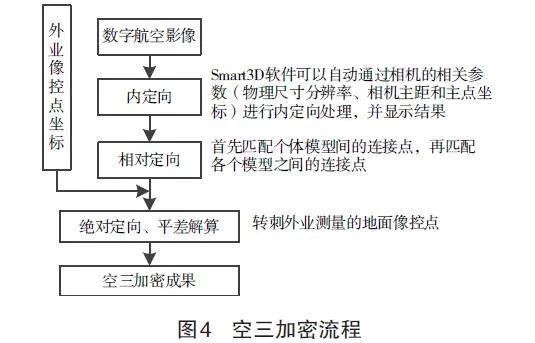
2.1空三加密
空三加密流程,如图4所示。
2.2成果检验
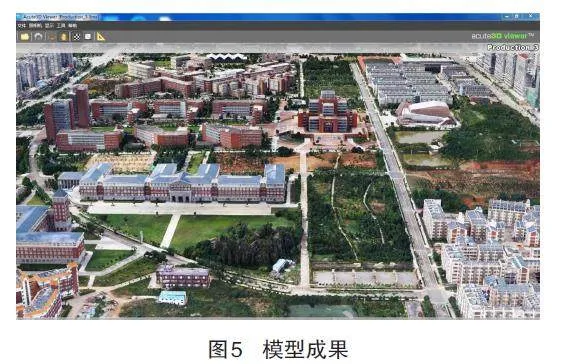
Acute3DViewer可以直接对s3c格式的模型成果进行查看和浏览,如图5所示。如果是osgb格式数据,则可以通过一系列转换操作制作一个s3c模型展示文件在Acute3DViewer里进行浏览查看。
Smart3D生成的数据格式有s3c、fbx、osgb、dae、obj、stl等多种类型,其中osgb、obj和fbx格式可以适用于多种建模软件,以便于后期进行修改。也适用于多种展示平台,可以快速在网络上进行发布,实现共享。
2.3模型修改和对禁飞区域的补充
在对细节要求不高的情况下,Smart3D生产的三维模型可以满足使用要求,后期无需太多修改。但在实际应用过程中,地物间的相互遮挡会给数据的获取造成比较大的干扰。加之目前软件自身也还有一些局限性,模型的细部结构存在破损和缺失的问题。尤其是靠近地面的部分,模型细节和纹理容易缺失和失真。针对模型的局部误差,可以使用其他建模软件如3dsMax、GeomagicStuido等进行修改,再通过retouch操作导入Smart3D软件,重复三维模型重建步骤。
针对禁飞区域,可以采用其他建模技术方法采集数据,建立三维模型,对倾斜三维模型场景进行补充。
Smart3D软件本身能够生成多种类型的数据成果,可以应用到其他三维软件平台中。也可以将3dsMax、GeomagicStuido等软件建立的三维模型成果通过retouch操作导入Smart3D软件中进行拼接。此外,可以将倾斜摄影与近年来发展较好的近景摄影技术进行有机联合,采用统一的空间基准及坐标系统进行空地数据联合建模。在今后的实际项目中,也可以考虑利用机载三维激光扫描获得的高精度点云数据与倾斜摄影测量技术获得的三维模型数据进行融合建模。
目前,正提倡多测合一,随着真三维建模需求和范围的增大,倾斜摄影测量与其他三维建模技术相结合,可大幅提升三维建模的生产效率和模型效果。
3精度评价
精度评价是评定三维模型能否在实际工作中得到应用的一个重要方面,也是衡量三维模型质量的关键环节。本小节根据倾斜摄影三维模型的特点,对测区模型成果进行空三精度、整体结构、细部结构3个方面的精度评价。
3.1空三精度评价
中误差是衡量观测精度的一种数字标准,可以很好地反映误差精度,在测绘领域应用广泛。测区内一共使用28个控制点,空三精度的平面最大误差为0.0013m,最小误差为0.0001m,中误差为0.0005m;高程最大误差为0.001m,最小误差为0,中误差为0.0007m;重投影的均方根最大误差为0.1000px,最小误差为0,中误差为0.0344px;3D最大误差为0.0021m,最小误差为0.0002m,中误差为0.0007m。所有误差均小于0.5,空三精度达到模型生产的要求。
3.2整体模型精度评价
测区一共采用28个控制点坐标,X方向中误差为0.041284m,Y方向中误差为0.032117m,平面中误差为0.052306m,高程中误差为0.060117m。参照《三维地理信息模型数据产品规范》,测量场景模型平面的中误差小于0.5m,高程的中误差小于0.37m,整体模型满足1∶500比例尺测图精度。
4结语
基于Smart3D软件的倾斜摄影建模方法,无需太多人工干预,具有很强的可操作性。并且其成果细部结构表现程度高,精度达到测绘级标准,成果格式也能与多种软件及平台有效结合,在实际工作中具有很强的应用价值。
参考文献
[1]宿文松.基于无人机倾斜摄影测量的露天矿三维建模及应用[D].邯郸:河北工程大学,2023.
[2]胡雪晴,毛庆洲,胡庆武,等.无人机机载激光雷达四面塔镜三维成像方法[J].激光与光电子学进展,2023,60(14):320-328.
[3]张玉涛,孙保燕,莫春华,等.无人机与三维激光扫描融合的拱桥三维重建[J].科学技术与工程,2023,23(6):2274-2281.
[4]陈真.基于无人机航拍图像的城市实景三维重建方法研究[D].重庆:重庆交通大学,2023.
[5]李露,孟偲,武永昌,等.无人机对地观测的遥感场景三维重建实验方案[J].实验室研究与探索,2023,42(3):235-240.
[6]李龙威.无人机航摄影像快速正射拼接及三维重建系统设计与实现[D].西安:长安大学,2023.
