
基于DeepLabv3+的太阳能电池板污染面积分割与计算算法研究
2024-07-13 08:49耿欣娄清辉冯康康潘天航杨玉朱旻昊
新能源科技 2024年3期
耿欣 娄清辉 冯康康 潘天航 杨玉 朱旻昊
摘要:在露天环境中运行的太阳能电池板易受积尘等污染物覆盖的影响,进而降低其发电效率。为了定量评估污染物对太阳能电池板表面污染的程度,文章采用DeepLabv3+语义分割模型对太阳能电池板污染面积进行分割与计算。首先,通过训练DeepLabv3+模型,实现对太阳能电池板图像的精确分割,从而提取出污染区域。然后,通过计算污染区域像素点总数占整块太阳能电池板图像像素点总数的比例,量化污染物的面积。最后,在实际场景中的实验表明,DeepLabv3+分割太阳能电池板污染物的精准率、F1得分和平均准确率分别达到97.17%、96.45%和96.79%。该方法为太阳能电池板的维护管理和效率优化提供了科学依据。
关键词:DeepLabv3+;太阳能电池板;面积分割
中图分类号: TP3-05 文献标志码: A
0 引言
太阳能发电作为一种清洁可再生能源,具有广泛的地理分布特性,在发电过程中不产生温室气体和其他污染物,对缓解环境破坏具有显著的作用[1]。随着太阳能技术的持续进步,太阳能发电的成本逐渐降低,已经成为主流的发电方式之一。灰尘及鸟粪的积累不仅会遮挡电池板表面,减少太阳光的吸收,还可能导致热斑效应,引起局部温度升高,从而降低发电效率。此外,污染物中的化学物质可能对电池板表面造成腐蚀[2]。因此,定期监测、清洁和维护太阳能电池板,以减轻污染物的影响,对于保持其发电效率至关重要。
针对太阳能电池板因积尘、鸟粪等污染而导致的效率下降问题,本研究采用深度学习技术中的语义分割模型DeepLabv3+,对太阳能电池板图像上的污染物进行精确监测与分割[3],并计算污染物在电池板上的覆盖面积。这一方法为太阳能电池板的定期清理和维护提供了科学的理论基础。DeepLabv3+模型是在DeepLabv3的基础上发展起来的[4],通过引入一个简单有效的解码器模块来优化物体边界的分割精度。该模型将深度可分离卷积应用于空洞空间金字塔池化(Atrous Spatial Pyramid Pooling, ASPP)和解码器部分[5-6],从而构建了一个更快速、强大的编码器-解码器网络。这种网络结构的设计旨在提高分割任务的效率和准确性,特别是在处理太阳能电池板这样的实际应用场景时。
1 DeepLabv3+模型介绍
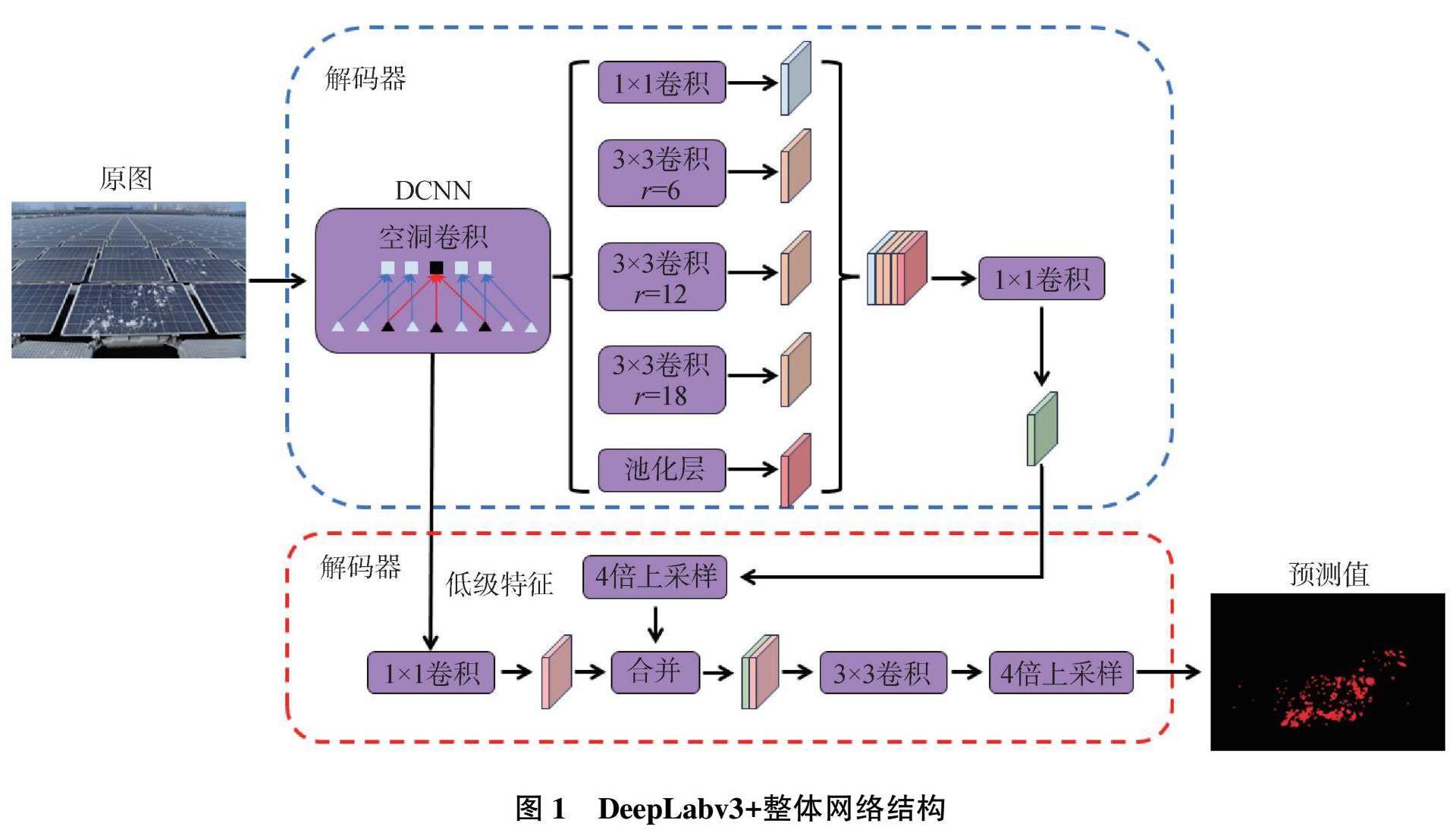
DeepLabv3+模型的核心架构是编码器-解码器结构。在这种结构中,编码器逐步减少特征图的尺寸,同时捕获更高层次的语义信息;解码器的任务是从这些压缩的特征中恢复出空间信息,以实现精确的图像分割。在DeepLabv3的基础上,DeepLabv3+引入了一个简单而有效的解码器模块,这一模块显著提升了分割效果的清晰度和准确性。DeepLabv3+模型的总体结构如图1所示,包含了编码器、解码器以及它们之间的交互过程。
1.1 空洞卷积
DeepLabv3+模型采用的空洞卷积技术通过调节深度卷积神经网络的特征分辨率,来调整卷积滤波器的视野,从而实现多尺度信息的捕获。对于输入的二维特征映射x,空洞卷积在其输出映射y的每个位置i上应用卷积滤波器w的过程可形式化为以下公式:
y|i|=∑kx[i+r·k]w[k](1)
其中,参数r控制输入特征的采样步幅。当r设置为1时,空洞卷积退化为标准的卷积操作。通过调整r的值,可以自适应地修改滤波器的视角,从而在不同的感受野中捕获多尺度的上下文信息。
1.2 深度可分离卷积
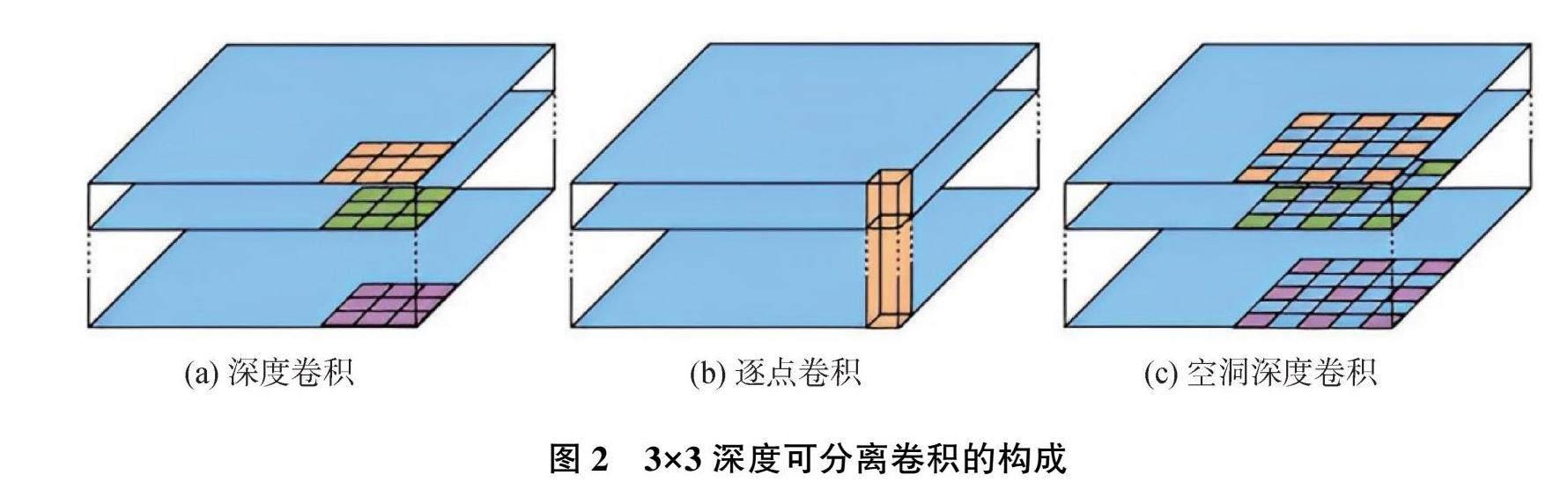
深度可分离卷积(Depthwise Separable Convolution)是一种高效的卷积操作[7],它将标准卷积分解为2个步骤:先对每个输入通道独立执行空间卷积,即深度卷积;然后,通过1×1的点卷积(也称为逐点卷积)来组合这些深度卷积的输出。这种分解过程如图2所示。深度可分离卷积在保持模型性能的同时,能够显著降低模型的计算量,使其成为深度学习中常用的卷积操作之一。
1.3 编码器
DeepLabv3+模型的解码器部分包括2个主要组件:主干网络(DCNN)和空洞空间金字塔池化(ASPP)模块。解码器中的第一个连接模块是DCNN,用于提取太阳能电池板被污染图像特征的主干网络。DCNN的输出连接到ASPP网络,该网络主要由1个1×1卷积、3个3×3的空洞卷积和1个全局池化层组成,用于对主干网络的输出进行处理。处理后的结果通过1个1×1卷积来减少通道数。具体过程如下:
(1)主干网络有2种网络结构选择,一种是改用空洞卷积的ResNet系列,另一种是改进的Xception网络。从主干网络中提取的太阳能电池板被污染的特征图像分为2部分,一部分是最后一层卷积输出的特征图,另一部分是中间的低层特征图。主干网络的输出第一部分被输入到ASPP模块,第二部分被输入到解码器模块。
(2)主干网络的输出作为ASPP模块的输入。在ASPP中,采用了4种不同膨胀率的空洞卷积块(每个块包括卷积、批标准化(BN)和激活层)以及1个全局平均池化块(包括池化、卷积、BN和激活层),共产生5组特征图。这些特征图连接起来,经过1个1×1卷积块(包括卷积、BN、激活和dropout层)处理,最后输入到解码器中。
1.4 解码器
在DeepLabv3+模型的解码器部分,输入数据包括来自主干网络中间层的低级特征图和ASPP层的输出。首先,对编码器输出的特征图进行双线性上采样,将其空间分辨率放大4倍。随后,对来自主干网络的底层特征图执行1×1卷积操作,以减少输出通道的数量。接下来,将经过上采样的特征图与经过通道减少的特征图进行串联。串联后,使用3×3卷积操作对特征进行细化,以增强特征的表示能力。最后,对细化后的特征进行简单的双线性上采样,再次将其空间分辨率放大4倍,以便与输入图像的分辨率匹配。这一系列操作确保了模型能够生成与输入图像相同分辨率的精确分割图。
2 数据集与实验环境
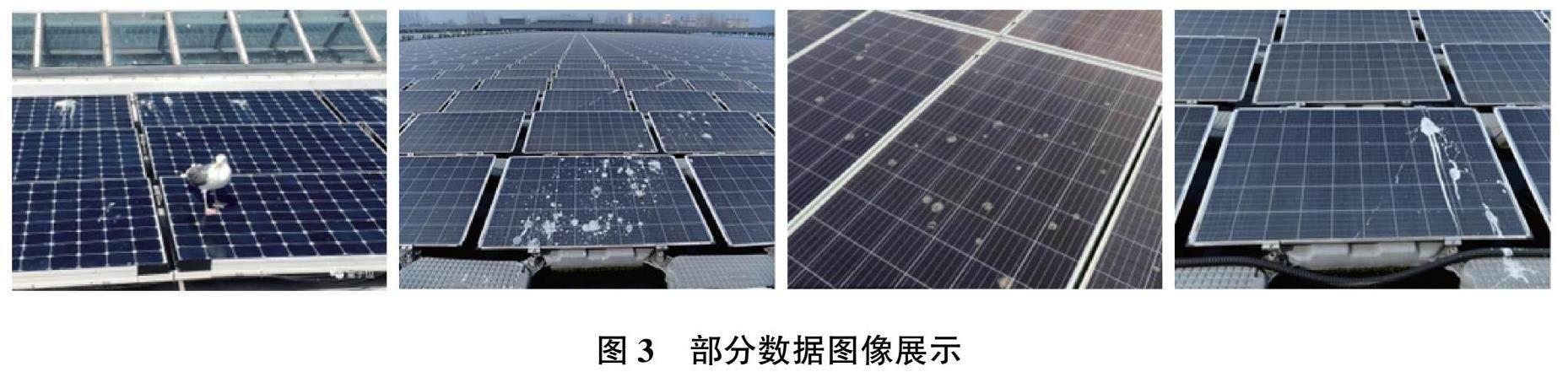
本研究的数据集收集工作依托于大疆无人机[8],该无人机搭载了禅思H20-四传感器套件。该套件集成了高分辨率变焦广角相机、无线网卡等设备。数据采集工作在甘肃省某实验场进行,确保了数据的代表性和多样性。部分数据图像如图3所示,以供参考和分析。
本实验在配备了Ubuntu 18.04操作系统、NVIDIA RTX 3090显卡和Pytorch 1.8框架的服务器环境中顺利开展。该服务器环境为实验提供了强大的计算能力和稳定的软件支持,确保了实验的顺利进行和结果的准确性。
3 实验结果与分析
3.1 评价指标
本实验使用精准率(P)、召回率(R)、F1得分(F1-Score)和平均准确率(mAP)作为整个分割模型的评价指标,同时使用了污染率(CR)表示污染面积占整块太阳能光板面积的比例。
P表示语义分割的类别像素的准确率,R表示预测值和真实值均为真所占样本的比例,P和R可表示为:
P=TPTP+FP(2)
R=TPTP+FN(3)
其中,TP表示将正类判断为正类,FP表示将负类判断为负类,FN表示将正类判断为负类。F1得分为精准率和召回率的调和平均数,可以表示为:
F1-Score=2·P·RP+R(4)
mAP用于计算每一类分类正确的像素点数和该类的所有像素点数的比例的平均值,可以表示为:
mAP=1k+1∑ki=0pii∑kj=0pij(5)
其中,k表示类别的个数;p表示该类分类正确的点数个数。
CR用于衡量一块太阳能电池板的污染程度,当CR达到10%及其以上时,则会严重影响太阳能电池板的采光性能。由于有些污染物对太阳能电池板具有一定的腐蚀作用,CR值越高的太阳能电池板应该优先清理。CR可表示为:
CR=nN×100%(6)
其中,n表示被污染的像素点个数;N表示整块太阳能电池板像素点个数。
3.2 实验结果与可视化
在所采集的数据集上,将DeepLabv3+、SegNet[9]、RefineNet[10]、DeepLabv3进行对比实验,实验结果如表1所示。
DeepLabv3+模型在3个评价指标上都表现出最佳性能,其精准率达到97.17%、F1分数为96.45%、平均准确率为96.79%;这表明DeepLabv3+在太阳能电池板污染数据集上具有很高的准确性和稳健性,能够有效地对不同类别的像素精确分割出污染物。SegNet模型在3个指标上的表现相对较弱,其精准率为92.22%、F1分数为90.05%、平均准确率为89.67%;这表明SegNet在保持高精准率的同时,可能在某些类别上出现了较多的误分类,导致F1分数和平均准确率相对较低。RefineNet模型的表现位于DeepLabv3+和SegNet之间,其精准率为93.88%、F1分数为93.55%、平均准确率为92.33%;RefineNet的设计旨在通过多尺度特征的融合提高分割性能,尽管其性能略低于DeepLabv3+,但仍然表现出较高的分割精度。DeepLabv3模型的表现紧随DeepLabv3+之后,其精准率为95.96%、F1分数为95.47%、平均准确率为94.99%;这表明DeepLabv3同样具有很高的分割精度和稳健性,尽管在某些情况下可能略逊于DeepLabv3+。
总之,DeepLabv3+模型在评估太阳能电池板污染语义分割中展现了最优的性能,如图4所示为采用DeepLabv3+对有污染的太阳能电池板图片的分割效果。
4 结语
本研究旨在解决太阳能电池板因积尘、鸟粪等污染而导致的效率下降问题,为此采用深度学习技术中的DeepLabv3+模型对太阳能电池板上的污染物图像进行精确分割。通过对比实验,验证了DeepLabv3+模型在太阳能电池板污染物图像分割任务中的卓越性能,其精准率、F1分数和平均准确率分别达到了97.17%、96.45%和96.79%,显著优于SegNet、RefineNet和DeepLabv3传统模型。在太阳能电池板污染物图像的分割过程中,本研究通过计算污染物像素点的数量,得出污染物覆盖太阳能电池板的比例,这一比例对于评估污染的程度和范围至关重要。DeepLabv3+模型的应用,不仅为太阳能电池板污染面积的快速计算提供了可能,而且为及时清除污染物、确保太阳能电池板高效运行和维护系统的安全稳定提供了坚实的技术支持。因此,本研究的成果对于推动太阳能电池板的智能化维护和管理具有重要的理论和实践意义。
[参考文献]
[1]闫云飞, 张智恩, 张力, 等. 太阳能利用技术及其应用[J]. 太阳能学报, 2012(增刊1): 47-56.
[2]杨景发, 邱鹏飞, 李冰, 等. 太阳能电池板跟踪与除尘装置的设计[J]. 机械设计与制造, 2013(9): 60-62.
[3]WANG Z, WANG J, YANG K, et al. Semantic segmentation of high-resolution remote sensing images based on a class feature attention mechanism fused with Deeplabv3+[J]. Computers & Geosciences, 2022(14): 1334-1348.
[4]CHEN L C, PAPANDREOU G, SCHROFF F, et al. Rethinking atrous convolution for semantic image segmentation[J]. arXiv, 2017(10): 1045-1060.
[5]CHEN L C, PAPANDREOU G, KOKKINOS I, et al. Deeplab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017(4): 834-848.
[6]周可鑫, 左云波, 谷玉海, 等. 基于 YOLO-GT 网络的零售商品目标检测方法[J]. 重庆理工大学学报 (自然科学), 2021(6): 174-184.
[7]王丹峰, 陈超波, 马天力, 等. 基于深度可分离卷积的 YOLOv3 行人检测算法[J]. 计算机应用与软件, 2020(6): 218-223.
[8]何道敬, 杜晓, 乔银荣, 等. 无人机信息安全研究综述[J]. 计算机学报, 2019(5): 1076-1094.
[9]BADRINARAYANAN V, KENDALL A, CIPOLLA R. Segnet: a deep convolutional encoder-decoder architecture for image segmentation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017(12): 2481-2495.
[10] ZHOU H, CHEN H, ZHANG Y, et al. Refine-net: normal refinement neural network for noisy point clouds[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022(1): 946-963.
(编辑 沈强)
Research on solar panel contamination area segmentation and
calculation algorithm based on DeepLabv3+
GENG Xin1, LOU Qinghui1, FENG Kangkang1, PAN Tianhang1, YANG Yu1, ZHU Minhao2
(1.Nanjing NR Electric Co.,Ltd., Nanjing 210000,China; 2.Nari Group Co.,Ltd., Nanjing 210000,China)
Abstract: Solar panels operating in open environments are susceptible to the accumulation of dust accumulation, which can reduce their power generation efficiency. To quantitatively assess the extent of the contamination on the surface of solar panels, this study employs the DeepLabv3+ semantic segmentation model to segment and calculate the area of the contamination on solar panels. Firstly, by training the DeepLabv3+ model, precise segmentation of solar panel images is achieved, thereby extracting the contaminated areas. Then, by calculating the proportion of the total number of pixel points in the contaminated area to the total number of pixel points in the entire solar panel image, the area of contamination by the contamination is quantified. Finally, experiments in real-world scenarios show that the precision, F1 score, and average accuracy of DeepLabv3+ segmenting the contamination on solar panels reach 97.17%, 96.45%, and 96.79% respectively. This method provides a scientific basis for the maintenance management and efficiency optimization of solar panels.
Key words: DeepLabv3+; solar panels; area segmentation.
